之前还未用SPI驱动过W25Qxx,这里记录一下这个过程
提供测试代码,测试工程下载

目录
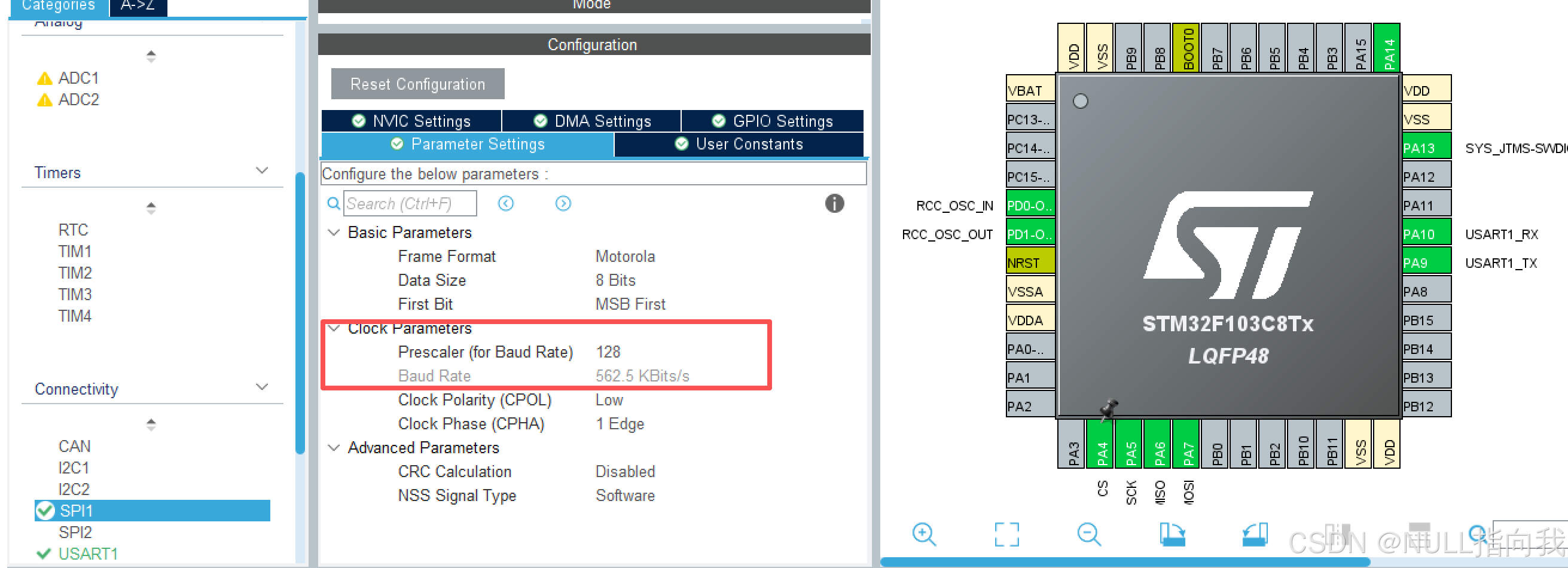
CubeMx配置:
有个CS使能脚要单独配置:
SPI的速率不能太高,其余保持原样:
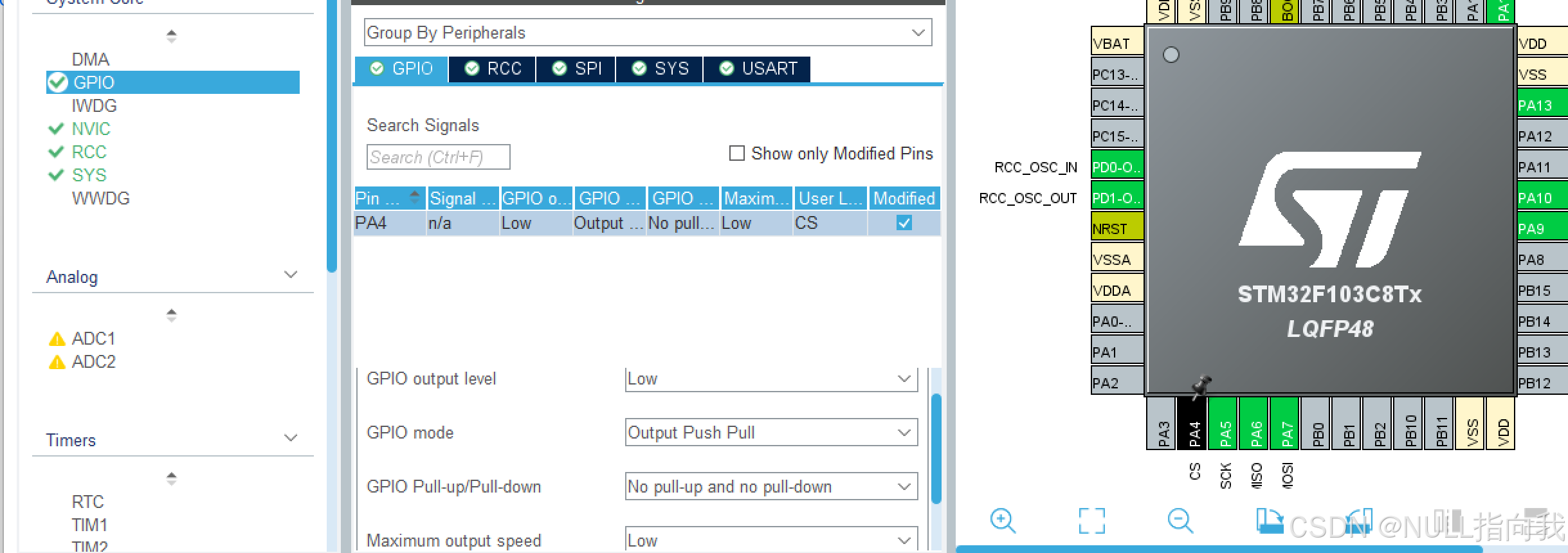
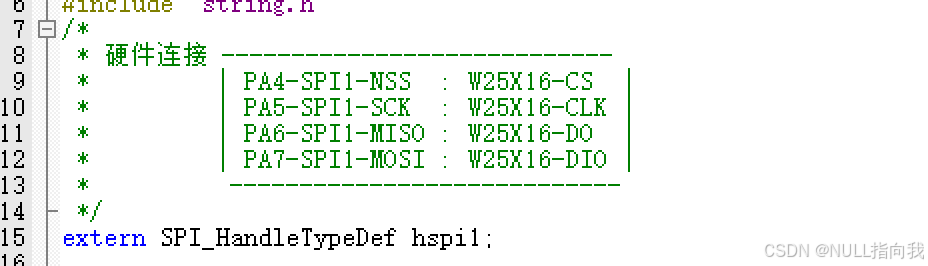
接线:
代码:
spi_W25Qxx.c
cpp
#include "spi_W25Qxx.h"
SPI_HandleTypeDef hspi1;
/**
* @brief Initializes the W25Q128FV interface.
* @retval None
*/
uint8_t BSP_W25Qx_Init(void)
{
/* Reset W25Qxxx */
BSP_W25Qx_Reset();
return BSP_W25Qx_GetStatus();
}
/**
* @brief This function reset the W25Qx.
* @retval None
*/
static void BSP_W25Qx_Reset(void)
{
uint8_t cmd[2] = {RESET_ENABLE_CMD,RESET_MEMORY_CMD};
W25Qx_Enable();
/* Send the reset command */
HAL_SPI_Transmit(&hspi1, cmd, 2, W25Qx_TIMEOUT_VALUE);
W25Qx_Disable();
}
/**
* @brief Reads current status of the W25Q128FV.
* @retval W25Q128FV memory status
*/
static uint8_t BSP_W25Qx_GetStatus(void)
{
uint8_t cmd[] = {READ_STATUS_REG1_CMD};
uint8_t status;
W25Qx_Enable();
/* Send the read status command */
HAL_SPI_Transmit(&hspi1, cmd, 1, W25Qx_TIMEOUT_VALUE);
/* Reception of the data */
HAL_SPI_Receive(&hspi1,&status, 1, W25Qx_TIMEOUT_VALUE);
W25Qx_Disable();
/* Check the value of the register */
if((status & W25Q128FV_FSR_BUSY) != 0)
{
return W25Qx_BUSY;
}
else
{
return W25Qx_OK;
}
}
/**
* @brief This function send a Write Enable and wait it is effective.
* @retval None
*/
uint8_t BSP_W25Qx_WriteEnable(void)
{
uint8_t cmd[] = {WRITE_ENABLE_CMD};
uint32_t tickstart = HAL_GetTick();
/*Select the FLASH: Chip Select low */
W25Qx_Enable();
/* Send the read ID command */
HAL_SPI_Transmit(&hspi1, cmd, 1, W25Qx_TIMEOUT_VALUE);
/*Deselect the FLASH: Chip Select high */
W25Qx_Disable();
/* Wait the end of Flash writing */
while(BSP_W25Qx_GetStatus() == W25Qx_BUSY)
{
/* Check for the Timeout */
if((HAL_GetTick() - tickstart) > W25Qx_TIMEOUT_VALUE)
{
return W25Qx_TIMEOUT;
}
}
return W25Qx_OK;
}
/**
* @brief Read Manufacture/Device ID.
* @param return value address
* @retval None
*/
void BSP_W25Qx_Read_ID(uint8_t *ID)
{
uint8_t cmd[4] = {READ_ID_CMD,0x00,0x00,0x00};
W25Qx_Enable();
/* Send the read ID command */
HAL_SPI_Transmit(&hspi1, cmd, 4, W25Qx_TIMEOUT_VALUE);
/* Reception of the data */
HAL_SPI_Receive(&hspi1,ID, 2, W25Qx_TIMEOUT_VALUE);
W25Qx_Disable();
}
/**
* @brief Reads an amount of data from the QSPI memory.
* @param pData: Pointer to data to be read
* @param ReadAddr: Read start address
* @param Size: Size of data to read
* @retval QSPI memory status
*/
uint8_t BSP_W25Qx_Read(uint8_t* pData, uint32_t ReadAddr, uint32_t Size)
{
uint8_t cmd[4];
/* Configure the command */
cmd[0] = READ_CMD;
cmd[1] = (uint8_t)(ReadAddr >> 16);
cmd[2] = (uint8_t)(ReadAddr >> 8);
cmd[3] = (uint8_t)(ReadAddr);
W25Qx_Enable();
/* Send the read ID command */
HAL_SPI_Transmit(&hspi1, cmd, 4, W25Qx_TIMEOUT_VALUE);
/* Reception of the data */
if (HAL_SPI_Receive(&hspi1, pData,Size,W25Qx_TIMEOUT_VALUE) != HAL_OK)
{
return W25Qx_ERROR;
}
W25Qx_Disable();
return W25Qx_OK;
}
/**
* @brief Writes an amount of data to the QSPI memory.
* @param pData: Pointer to data to be written
* @param WriteAddr: Write start address
* @param Size: Size of data to write,No more than 256byte.
* @retval QSPI memory status
*/
uint8_t BSP_W25Qx_Write(uint8_t* pData, uint32_t WriteAddr, uint32_t Size)
{
uint8_t cmd[4];
uint32_t end_addr, current_size, current_addr;
uint32_t tickstart = HAL_GetTick();
/* Calculation of the size between the write address and the end of the page */
current_addr = 0;
while (current_addr <= WriteAddr)
{
current_addr += W25Q128FV_PAGE_SIZE;
}
current_size = current_addr - WriteAddr;
/* Check if the size of the data is less than the remaining place in the page */
if (current_size > Size)
{
current_size = Size;
}
/* Initialize the adress variables */
current_addr = WriteAddr;
end_addr = WriteAddr + Size;
/* Perform the write page by page */
do
{
/* Configure the command */
cmd[0] = PAGE_PROG_CMD;
cmd[1] = (uint8_t)(current_addr >> 16);
cmd[2] = (uint8_t)(current_addr >> 8);
cmd[3] = (uint8_t)(current_addr);
/* Enable write operations */
BSP_W25Qx_WriteEnable();
W25Qx_Enable();
/* Send the command */
if (HAL_SPI_Transmit(&hspi1,cmd, 4, W25Qx_TIMEOUT_VALUE) != HAL_OK)
{
return W25Qx_ERROR;
}
/* Transmission of the data */
if (HAL_SPI_Transmit(&hspi1, pData,current_size, W25Qx_TIMEOUT_VALUE) != HAL_OK)
{
return W25Qx_ERROR;
}
W25Qx_Disable();
/* Wait the end of Flash writing */
while(BSP_W25Qx_GetStatus() == W25Qx_BUSY)
{
/* Check for the Timeout */
if((HAL_GetTick() - tickstart) > W25Qx_TIMEOUT_VALUE)
{
return W25Qx_TIMEOUT;
}
}
/* Update the address and size variables for next page programming */
current_addr += current_size;
pData += current_size;
current_size = ((current_addr + W25Q128FV_PAGE_SIZE) > end_addr) ? (end_addr - current_addr) : W25Q128FV_PAGE_SIZE;
} while (current_addr < end_addr);
return W25Qx_OK;
}
/**
* @brief Erases the specified block of the QSPI memory.
* @param BlockAddress: Block address to erase
* @retval QSPI memory status
*/
uint8_t BSP_W25Qx_Erase_Block(uint32_t Address)
{
uint8_t cmd[4];
uint32_t tickstart = HAL_GetTick();
cmd[0] = SECTOR_ERASE_CMD;
cmd[1] = (uint8_t)(Address >> 16);
cmd[2] = (uint8_t)(Address >> 8);
cmd[3] = (uint8_t)(Address);
/* Enable write operations */
BSP_W25Qx_WriteEnable();
/*Select the FLASH: Chip Select low */
W25Qx_Enable();
/* Send the read ID command */
HAL_SPI_Transmit(&hspi1, cmd, 4, W25Qx_TIMEOUT_VALUE);
/*Deselect the FLASH: Chip Select high */
W25Qx_Disable();
/* Wait the end of Flash writing */
while(BSP_W25Qx_GetStatus() == W25Qx_BUSY)
{
/* Check for the Timeout */
if((HAL_GetTick() - tickstart) > W25Q128FV_SECTOR_ERASE_MAX_TIME)
{
return W25Qx_TIMEOUT;
}
}
return W25Qx_OK;
}
/**
* @brief Erases the entire QSPI memory.This function will take a very long time.
* @retval QSPI memory status
*/
uint8_t BSP_W25Qx_Erase_Chip(void)
{
uint8_t cmd[4];
uint32_t tickstart = HAL_GetTick();
cmd[0] = SECTOR_ERASE_CMD;
/* Enable write operations */
BSP_W25Qx_WriteEnable();
/*Select the FLASH: Chip Select low */
W25Qx_Enable();
/* Send the read ID command */
HAL_SPI_Transmit(&hspi1, cmd, 1, W25Qx_TIMEOUT_VALUE);
/*Deselect the FLASH: Chip Select high */
W25Qx_Disable();
/* Wait the end of Flash writing */
while(BSP_W25Qx_GetStatus() != W25Qx_BUSY)
{
/* Check for the Timeout */
if((HAL_GetTick() - tickstart) > W25Q128FV_BULK_ERASE_MAX_TIME)
{
return W25Qx_TIMEOUT;
}
}
return W25Qx_OK;
}spi_W25Qxx.h
cpp
#ifndef __spi_W25Qxx_H__
#define __spi_W25Qxx_H__
#include "stm32f1xx_hal.h"
#include "Uart.h"
#include "string.h"
/*
* 硬件连接 ----------------------------
* | PA4-SPI1-NSS : W25X16-CS |
* | PA5-SPI1-SCK : W25X16-CLK |
* | PA6-SPI1-MISO : W25X16-DO |
* | PA7-SPI1-MOSI : W25X16-DIO |
* ----------------------------
*/
extern SPI_HandleTypeDef hspi1;
#ifdef __cplusplus
extern "C" {
#endif
/**
* @brief W25Q128FV Configuration
*/
#define W25Q128FV_FLASH_SIZE 0x1000000 /* 128 MBits => 16MBytes */
#define W25Q128FV_SECTOR_SIZE 0x10000 /* 256 sectors of 64KBytes */
#define W25Q128FV_SUBSECTOR_SIZE 0x1000 /* 4096 subsectors of 4kBytes */
#define W25Q128FV_PAGE_SIZE 0x100 /* 65536 pages of 256 bytes */
#define W25Q128FV_DUMMY_CYCLES_READ 4
#define W25Q128FV_DUMMY_CYCLES_READ_QUAD 10
#define W25Q128FV_BULK_ERASE_MAX_TIME 250000
#define W25Q128FV_SECTOR_ERASE_MAX_TIME 3000
#define W25Q128FV_SUBSECTOR_ERASE_MAX_TIME 800
#define W25Qx_TIMEOUT_VALUE 1000
/**
* @brief W25Q128FV Commands
*/
/* Reset Operations */
#define RESET_ENABLE_CMD 0x66
#define RESET_MEMORY_CMD 0x99
#define ENTER_QPI_MODE_CMD 0x38
#define EXIT_QPI_MODE_CMD 0xFF
/* Identification Operations */
#define READ_ID_CMD 0x90
#define DUAL_READ_ID_CMD 0x92
#define QUAD_READ_ID_CMD 0x94
#define READ_JEDEC_ID_CMD 0x9F
/* Read Operations */
#define READ_CMD 0x03
#define FAST_READ_CMD 0x0B
#define DUAL_OUT_FAST_READ_CMD 0x3B
#define DUAL_INOUT_FAST_READ_CMD 0xBB
#define QUAD_OUT_FAST_READ_CMD 0x6B
#define QUAD_INOUT_FAST_READ_CMD 0xEB
/* Write Operations */
#define WRITE_ENABLE_CMD 0x06
#define WRITE_DISABLE_CMD 0x04
/* Register Operations */
#define READ_STATUS_REG1_CMD 0x05
#define READ_STATUS_REG2_CMD 0x35
#define READ_STATUS_REG3_CMD 0x15
#define WRITE_STATUS_REG1_CMD 0x01
#define WRITE_STATUS_REG2_CMD 0x31
#define WRITE_STATUS_REG3_CMD 0x11
/* Program Operations */
#define PAGE_PROG_CMD 0x02
#define QUAD_INPUT_PAGE_PROG_CMD 0x32
/* Erase Operations */
#define SECTOR_ERASE_CMD 0x20
#define CHIP_ERASE_CMD 0xC7
#define PROG_ERASE_RESUME_CMD 0x7A
#define PROG_ERASE_SUSPEND_CMD 0x75
/* Flag Status Register */
#define W25Q128FV_FSR_BUSY ((uint8_t)0x01) /*!< busy */
#define W25Q128FV_FSR_WREN ((uint8_t)0x02) /*!< write enable */
#define W25Q128FV_FSR_QE ((uint8_t)0x02) /*!< quad enable */
#define CS_Pin GPIO_PIN_4
#define CS_GPIO_Port GPIOA
#define W25Qx_Enable() HAL_GPIO_WritePin(CS_GPIO_Port, CS_Pin, GPIO_PIN_RESET)
#define W25Qx_Disable() HAL_GPIO_WritePin(CS_GPIO_Port, CS_Pin, GPIO_PIN_SET)
#define W25Qx_OK ((uint8_t)0x00)
#define W25Qx_ERROR ((uint8_t)0x01)
#define W25Qx_BUSY ((uint8_t)0x02)
#define W25Qx_TIMEOUT ((uint8_t)0x03)
uint8_t BSP_W25Qx_Init(void);
static void BSP_W25Qx_Reset(void);
static uint8_t BSP_W25Qx_GetStatus(void);
uint8_t BSP_W25Qx_WriteEnable(void);
void BSP_W25Qx_Read_ID(uint8_t *ID);
uint8_t BSP_W25Qx_Read(uint8_t* pData, uint32_t ReadAddr, uint32_t Size);
uint8_t BSP_W25Qx_Write(uint8_t* pData, uint32_t WriteAddr, uint32_t Size);
uint8_t BSP_W25Qx_Erase_Block(uint32_t Address);
uint8_t BSP_W25Qx_Erase_Chip(void);
/**
* @}
*/
/** @defgroup W25Q128FV_Exported_Functions
* @{
*/
/**
* @}
*/
/**
* @}
*/
/**
* @}
*/
/**
* @}
*/
#ifdef __cplusplus
}
#endif
#endif /* __W25Qx_H */功能测试代码:
这是放在主函数的功能测试代码:
这段是全局变量
cppuint8_t wData[0x100]={0x01,0x02,0x03}; uint8_t rData[0x100]; uint8_t ID[4]={0x22,0x22}; uint32_t i;这段放开机初始化执行一次就行
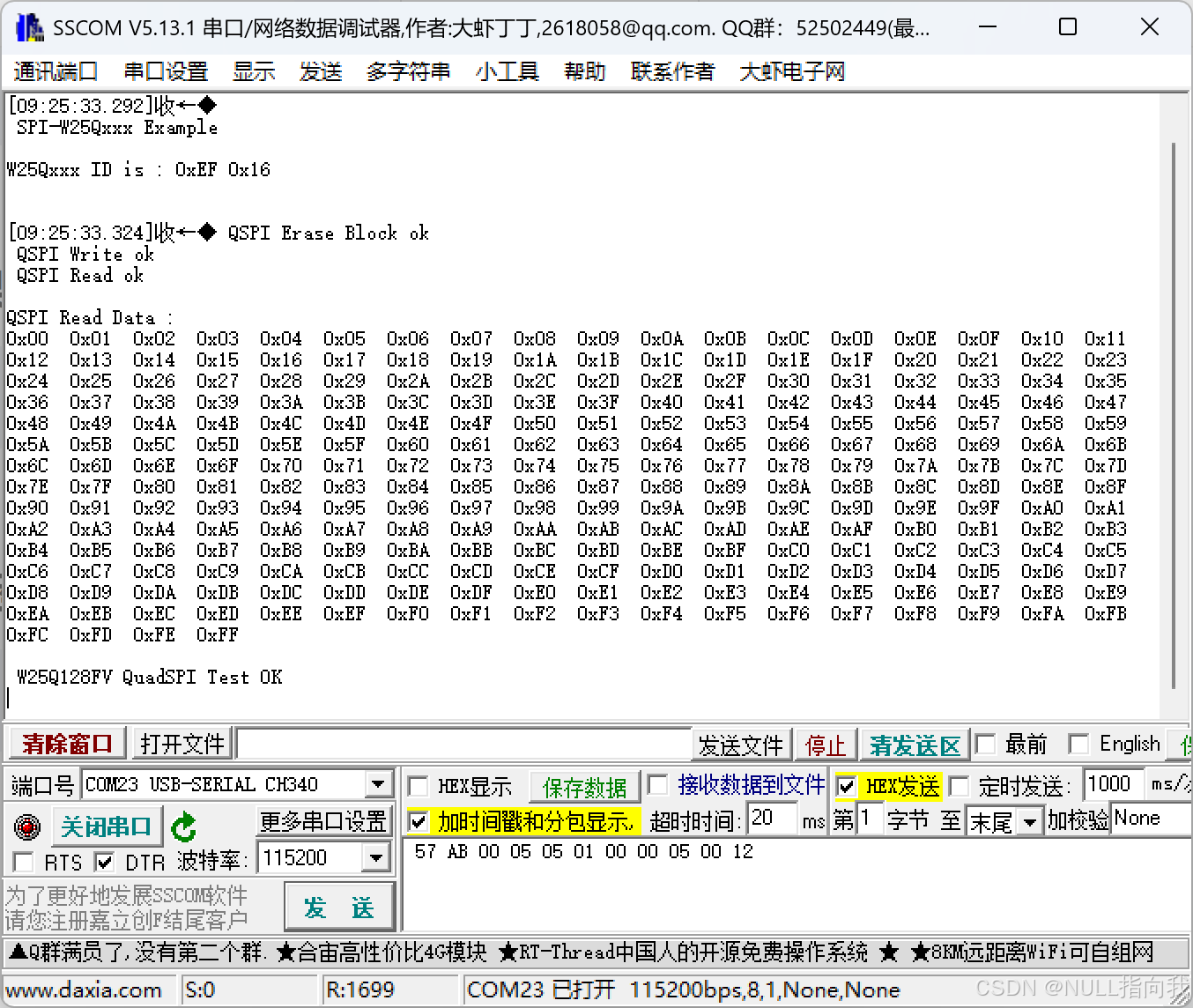
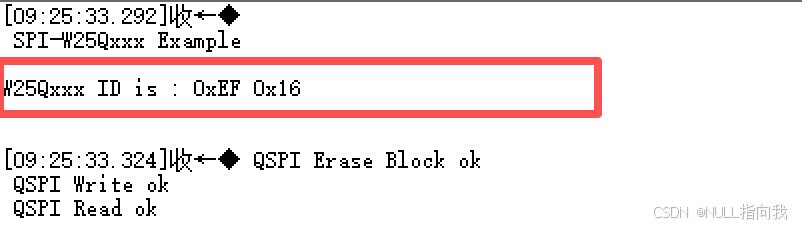
cppprintf_uart1("\r\n SPI-W25Qxxx Example \r\n\r\n"); /*##-1- Read the device ID ########################*/ BSP_W25Qx_Init(); BSP_W25Qx_Read_ID(ID); printf_uart1("W25Qxxx ID is : "); for(i=0;i<2;i++) { printf_uart1("0x%02X ",ID[i]); } printf_uart1("\r\n\r\n"); /*##-2- Erase Block ##################################*/ if(BSP_W25Qx_Erase_Block(0) == W25Qx_OK) printf_uart1(" QSPI Erase Block ok\r\n"); else Error_Handler(); /*##-2- Written to the flash ########################*/ /* fill buffer */ for(i =0;i<0x100;i ++) { wData[i] = i; rData[i] = 0; } if(BSP_W25Qx_Write(wData,0x00,0x100)== W25Qx_OK) printf_uart1(" QSPI Write ok\r\n"); else Error_Handler(); /*##-3- Read the flash ########################*/ if(BSP_W25Qx_Read(rData,0x00,0x100)== W25Qx_OK) printf_uart1(" QSPI Read ok\r\n\r\n"); else Error_Handler(); printf_uart1("QSPI Read Data : \r\n"); for(i =0;i<0x100;i++) printf_uart1("0x%02X ",rData[i]); printf_uart1("\r\n\r\n"); /*##-4- check date ########################*/ if(memcmp(wData,rData,0x100) == 0 ) printf_uart1(" W25Q128FV QuadSPI Test OK\r\n"); else printf_uart1(" W25Q128FV QuadSPI Test False\r\n");
测试结果:
下载后单片机直接复位开机就行