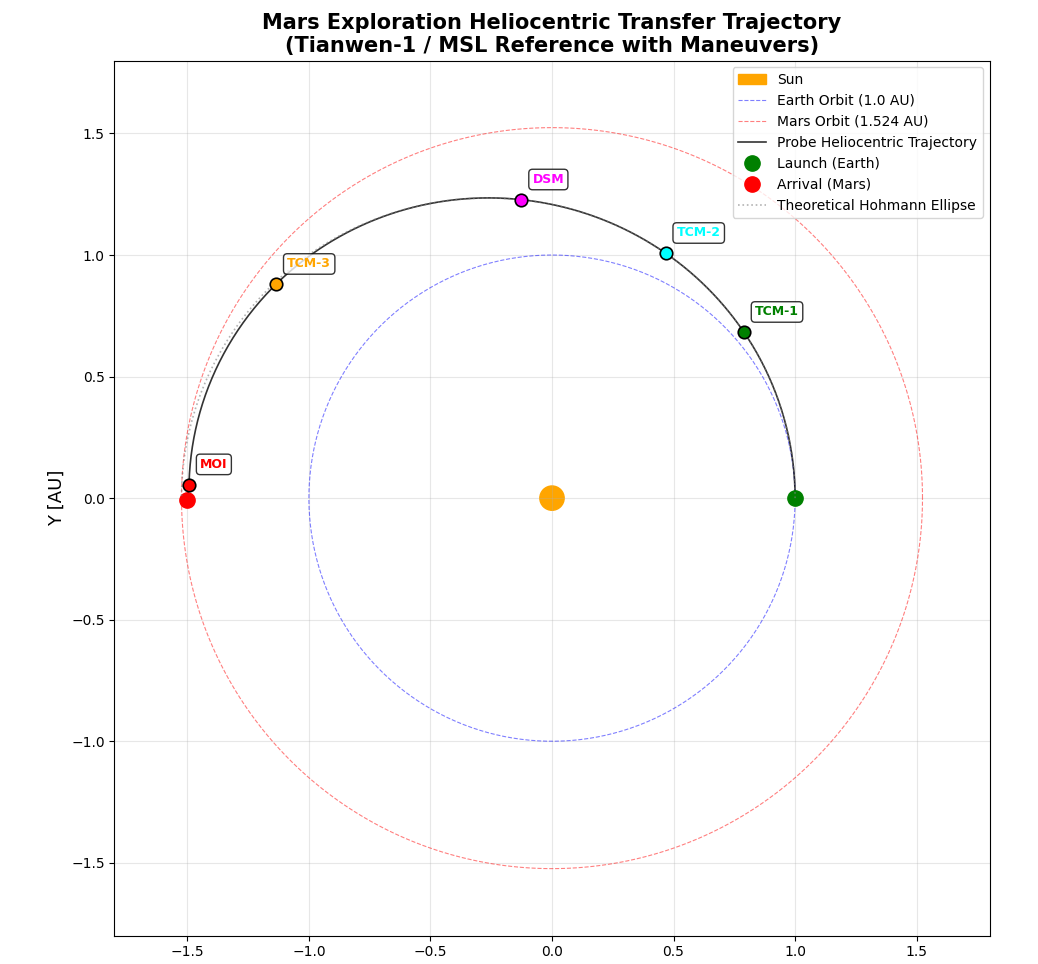
本文介绍了一个火星探测任务的轨道模拟程序,使用Python数值计算库模拟了从地球到火星的转移轨道。程序基于二体问题计算太阳引力作用下的航天器轨迹,采用Hohmann转移轨道理论设计初始轨道参数,并加入了五次轨道机动(包括深空机动和轨迹修正)。模拟结果显示:转移轨道半长轴1.262AU,偏心率0.207,总飞行时间202天,总ΔV预算约323.2m/s。程序输出了2D和3D可视化结果,展示了航天器从地球轨道出发,经多次机动后到达火星轨道的完整轨迹。该模拟为火星探测任务提供了轨道设计和机动规划的参考框架。
五、轨迹出现直线 / 错位问题的数学原因(原代码 bug 根源)
- 原积分未均匀布点
t_eval,仅用自适应步长,分段拼接时时间点稀疏,视觉出现直线段; - 机动状态赋值顺序错误,先存轨迹再改速度,造成轨迹点与机动不同步,重复画线;
- 修正方案:每段积分均匀取时间采样点,先积分结束再统一更新速度状态,保证轨迹连续光滑。
python
import numpy as np
from scipy.integrate import solve_ivp
import matplotlib.pyplot as plt
from matplotlib.patches import Circle
from mpl_toolkits.mplot3d import Axes3D
# ==================== Celestial Constants & Orbital Parameters ====================
# Astronomical Unit (AU) and time units (seconds)
AU = 1.495978707e11 # 1 AU [m]
DAY = 86400.0 # 1 day [s]
SIDEREAL_YEAR = 365.256363004 * DAY # 1 sidereal year [s]
# Gravitational parameters
MU_SUN = 1.32712440018e20 # Sun gravitational parameter [m^3/s^2]
MU_EARTH = 3.986004418e14 # Earth gravitational parameter [m^3/s^2]
MU_MARS = 4.282837e13 # Mars gravitational parameter [m^3/s^2]
# Sun radius (for visualization)
R_SUN = 6.957e8 # Sun radius [m]
# ==================== Mission Parameters ====================
T_FLIGHT = 202.0 * DAY # Total flight time [s]
# ==================== Orbital Mechanics Helper Functions ====================
def norm(v):
"""Compute Euclidean norm of a vector"""
return np.sqrt(np.dot(v, v))
def acceleration_sun(t, state):
"""
Heliocentric two-body acceleration
state: [x, y, z, vx, vy, vz]
return: [vx, vy, vz, ax, ay, az]
"""
r_vec = state[:3]
r = norm(r_vec)
a_grav = -MU_SUN / r**3 * r_vec
return np.concatenate([state[3:], a_grav])
def hohmann_transfer(r1, r2):
"""
Calculate Hohmann transfer orbit parameters
r1: Earth orbit radius [m] (circular approximation)
r2: Mars orbit radius [m] (circular approximation)
return: semi-major axis, velocity increments, transfer time, velocities
"""
a_trans = (r1 + r2) / 2.0
v_earth = np.sqrt(MU_SUN / r1)
v_perihelion = np.sqrt(2*MU_SUN/r1 - MU_SUN/a_trans)
v_aphelion = np.sqrt(2*MU_SUN/r2 - MU_SUN/a_trans)
v_mars = np.sqrt(MU_SUN / r2)
delta_v1 = v_perihelion - v_earth
delta_v2 = v_mars - v_aphelion
T_trans = np.pi * np.sqrt(a_trans**3 / MU_SUN)
return a_trans, delta_v1, delta_v2, T_trans, v_perihelion, v_aphelion
# ==================== Main Simulation ====================
def simulate_mars_mission():
"""
Mars exploration mission trajectory simulation
Includes: heliocentric transfer with deep space maneuver and trajectory corrections
"""
# Simplified circular orbit parameters
r_earth = 1.0 * AU
r_mars = 1.524 * AU
# Hohmann transfer calculation
a_trans, dv1, dv2, T_trans, v_perihelion, v_aphelion = hohmann_transfer(r_earth, r_mars)
e_trans = 1.0 - r_earth / a_trans
print("="*60)
print("MARS EXPLORATION ORBIT SIMULATION PARAMETERS")
print("="*60)
print(f"Transfer semi-major axis: {a_trans/AU:.4f} AU")
print(f"Transfer eccentricity: {e_trans:.4f}")
print(f"Hohmann transfer time: {T_trans/DAY:.2f} days")
print(f"ΔV1 (Departure burn): {dv1:.2f} m/s")
print(f"ΔV2 (Arrival burn): {dv2:.2f} m/s")
print(f"Perihelion velocity: {v_perihelion:.2f} m/s")
print(f"Aphelion velocity: {v_aphelion:.2f} m/s")
print(f"Total flight time: {T_FLIGHT/DAY:.2f} days")
print("="*60)
# Maneuver timeline
t_dsm = 0.40 * T_trans
t_tcm1 = 0.15 * T_trans
t_tcm2 = 0.25 * T_trans
t_tcm3 = 0.70 * T_trans
t_moi = 0.98 * T_trans
maneuvers = {
"TCM-1": {"t": t_tcm1, "dv": np.array([15.0, 0.0, 0.0])},
"TCM-2": {"t": t_tcm2, "dv": np.array([0.0, 10.0, 0.0])},
"DSM": {"t": t_dsm, "dv": np.array([250.0, 0.0, -50.0])},
"TCM-3": {"t": t_tcm3, "dv": np.array([8.0, 0.0, 0.0])},
"MOI": {"t": t_moi, "dv": np.array([-dv2, 0.0, 0.0])},
}
print("\nManeuver Timeline:")
print("-"*60)
for name, m in maneuvers.items():
print(f" {name:6s}: t = {m['t']/DAY:8.2f} days, |ΔV| = {norm(m['dv']):8.2f} m/s")
print("="*60)
# Initial state
v_earth = np.sqrt(MU_SUN / r_earth)
r0 = np.array([r_earth, 0.0, 0.0])
v0 = np.array([0.0, v_earth + dv1, 0.0])
state0 = np.concatenate([r0, v0])
print(f"\nInitial State:")
print(f" Position: [{r0[0]/AU:.4f}, {r0[1]/AU:.4f}, {r0[2]/AU:.4f}] AU")
print(f" Velocity: [{v0[0]:.2f}, {v0[1]:.2f}, {v0[2]:.2f}] m/s")
print(f" Departure ΔV: {dv1:.2f} m/s")
# Segmented integration with smooth time points
t_events = sorted([m["t"] for m in maneuvers.values()])
t_events = [0.0] + t_events + [T_trans]
trajectory_segments = []
time_segments = []
maneuver_points = []
current_state = state0.copy()
for i in range(len(t_events) - 1):
t_start = t_events[i]
t_end = t_events[i + 1]
# Generate smooth time points for continuous curve
t_eval = np.linspace(t_start, t_end, 100)
# Integrate trajectory segment
sol = solve_ivp(
acceleration_sun,
[t_start, t_end],
current_state,
method='DOP853',
t_eval=t_eval,
rtol=1e-10,
atol=1e-10
)
# Store segment data
trajectory_segments.append(sol.y.T)
time_segments.append(sol.t)
# Update state and apply maneuver
current_state = sol.y[:, -1].copy()
if t_end < T_trans:
for name, m in maneuvers.items():
if abs(m["t"] - t_end) < 1.0:
r_pre = current_state[:3].copy()
v_pre = current_state[3:].copy()
maneuver_points.append({
"name": name,
"t": t_end,
"r": r_pre.copy(),
"v_before": v_pre.copy(),
"dv": m["dv"].copy(),
"v_after": v_pre + m["dv"]
})
print(f"\n>>> Maneuver [{name}] @ t = {t_end/DAY:.2f} days")
print(f" Position: [{r_pre[0]/AU:.4f}, {r_pre[1]/AU:.4f}, {r_pre[2]/AU:.4f}] AU")
print(f" Velocity before: [{v_pre[0]:.2f}, {v_pre[1]:.2f}, {v_pre[2]:.2f}] m/s")
print(f" ΔV: [{m['dv'][0]:.2f}, {m['dv'][1]:.2f}, {m['dv'][2]:.2f}] m/s")
print(f" |ΔV| = {norm(m['dv']):.2f} m/s")
current_state[3:] = v_pre + m["dv"]
break
# Combine all segments
trajectory = np.vstack(trajectory_segments)
time_array = np.hstack(time_segments)
return trajectory, time_array, maneuver_points, r_earth, r_mars, T_trans
# ==================== Main Execution ====================
if __name__ == "__main__":
# Run simulation
trajectory, time_array, maneuver_points, r_earth, r_mars, T_trans = simulate_mars_mission()
# ==================== 2D Heliocentric Trajectory Visualization ====================
fig, ax = plt.subplots(1, 1, figsize=(12, 10))
# Plot Sun
sun = Circle((0, 0), 0.05, color='orange', label='Sun')
ax.add_patch(sun)
# Plot orbits
theta = np.linspace(0, 2*np.pi, 360)
earth_orbit_x = r_earth / AU * np.cos(theta)
earth_orbit_y = r_earth / AU * np.sin(theta)
ax.plot(earth_orbit_x, earth_orbit_y, 'b--', linewidth=0.8, alpha=0.5, label='Earth Orbit (1.0 AU)')
mars_orbit_x = r_mars / AU * np.cos(theta)
mars_orbit_y = r_mars / AU * np.sin(theta)
ax.plot(mars_orbit_x, mars_orbit_y, 'r--', linewidth=0.8, alpha=0.5, label='Mars Orbit (1.524 AU)')
# Plot smooth probe trajectory
traj_x = trajectory[:, 0] / AU
traj_y = trajectory[:, 1] / AU
ax.plot(traj_x, traj_y, 'k-', linewidth=1.2, alpha=0.8, label='Probe Heliocentric Trajectory')
# Plot maneuver points
colors = {'TCM-1': 'green', 'TCM-2': 'cyan', 'DSM': 'magenta', 'TCM-3': 'orange', 'MOI': 'red'}
for mp in maneuver_points:
c = colors.get(mp["name"], 'blue')
ax.plot(mp["r"][0]/AU, mp["r"][1]/AU, 'o', color=c, markersize=9,
markeredgecolor='black', markeredgewidth=1.2, zorder=5)
ax.annotate(mp["name"],
(mp["r"][0]/AU, mp["r"][1]/AU),
xytext=(8, 12), textcoords='offset points',
fontsize=9, fontweight='bold', color=c,
bbox=dict(boxstyle='round,pad=0.3', facecolor='white', alpha=0.8))
# Plot launch and arrival points
ax.plot(traj_x[0], traj_y[0], 'go', markersize=11, label='Launch (Earth)')
ax.plot(traj_x[-1], traj_y[-1], 'ro', markersize=11, label='Arrival (Mars)')
# Plot theoretical Hohmann ellipse
a_trans_au = (r_earth + r_mars) / (2 * AU)
c_au = (r_mars - r_earth) / (2 * AU)
b_au = np.sqrt(a_trans_au**2 - c_au**2)
center_x = -c_au
ellipse_theta = np.linspace(0, np.pi, 200)
ellipse_x = center_x + a_trans_au * np.cos(ellipse_theta)
ellipse_y = b_au * np.sin(ellipse_theta)
ax.plot(ellipse_x, ellipse_y, 'gray', linewidth=1.2, linestyle=':', alpha=0.6, label='Theoretical Hohmann Ellipse')
# Plot settings
ax.set_xlabel('X [AU]', fontsize=13)
ax.set_ylabel('Y [AU]', fontsize=13)
ax.set_title('Mars Exploration Heliocentric Transfer Trajectory\n(Tianwen-1 / MSL Reference with Maneuvers)',
fontsize=15, fontweight='bold')
ax.legend(loc='upper right', fontsize=10)
ax.set_aspect('equal')
ax.grid(True, alpha=0.3)
ax.set_xlim(-1.8, 1.8)
ax.set_ylim(-1.8, 1.8)
plt.tight_layout()
plt.savefig('mars_mission_trajectory_2d.png', dpi=150)
plt.show()
# ==================== 3D Trajectory Visualization ====================
fig3d = plt.figure(figsize=(14, 10))
ax3d = fig3d.add_subplot(111, projection='3d')
# 3D trajectory
ax3d.plot(trajectory[:, 0]/AU, trajectory[:, 1]/AU, trajectory[:, 2]/AU,
'k-', linewidth=1.2, alpha=0.8, label='Probe Trajectory')
# 3D orbits
ax3d.plot(earth_orbit_x, earth_orbit_y, np.zeros_like(earth_orbit_x),
'b--', linewidth=0.8, alpha=0.5, label='Earth Orbit')
ax3d.plot(mars_orbit_x, mars_orbit_y, np.zeros_like(mars_orbit_x),
'r--', linewidth=0.8, alpha=0.5, label='Mars Orbit')
# 3D maneuver points
for mp in maneuver_points:
c = colors.get(mp["name"], 'blue')
ax3d.scatter(mp["r"][0]/AU, mp["r"][1]/AU, mp["r"][2]/AU,
color=c, s=90, edgecolors='black', linewidth=1.2, zorder=5)
ax3d.text(mp["r"][0]/AU, mp["r"][1]/AU, mp["r"][2]/AU,
f' {mp["name"]}', fontsize=9, fontweight='bold', color=c)
# Sun
ax3d.scatter(0, 0, 0, color='orange', s=300, label='Sun')
# 3D plot settings
ax3d.set_xlabel('X [AU]', fontsize=12)
ax3d.set_ylabel('Y [AU]', fontsize=12)
ax3d.set_zlabel('Z [AU]', fontsize=12)
ax3d.set_title('Mars Exploration Heliocentric Transfer Trajectory (3D View)',
fontsize=14, fontweight='bold')
ax3d.legend(loc='upper right', fontsize=9)
max_range = 2.0
ax3d.set_xlim(-max_range, max_range)
ax3d.set_ylim(-max_range, max_range)
ax3d.set_zlim(-0.5, 0.5)
plt.tight_layout()
plt.savefig('mars_mission_trajectory_3d.png', dpi=150)
plt.show()
# ==================== Simulation Summary ====================
print("\n" + "="*60)
print("SIMULATION SUMMARY")
print("="*60)
print(f"Total data points: {len(trajectory)}")
print(f"Flight duration: {T_trans/DAY:.2f} days (~{T_trans/DAY/30.44:.1f} months)")
print(f"Total maneuvers: {len(maneuver_points)}")
total_dv = sum([norm(mp['dv']) for mp in maneuver_points])
print(f"Total ΔV budget: {total_dv:.2f} m/s")
print("\nManeuver Details:")
for mp in maneuver_points:
print(f" {mp['name']:6s} | t={mp['t']/DAY:7.2f}d | |ΔV|={norm(mp['dv']):8.2f} m/s | "
f"r=({mp['r'][0]/AU:.3f}, {mp['r'][1]/AU:.3f}, {mp['r'][2]/AU:.3f}) AU")
print("="*60)