一、 控制功能 & 应用场合
通过PLC的不同指令,发送两轴伺服电机所需要的速度与位置的频率和数量来实现电机的定位运行、JOG运行;
适用设备:
数控机床、印刷设备、包装设备、纺织设备、激光加工设备、机器人、自动化生产线等对工艺精度、加工效率和工作可靠性等要求相对较高的设备。
二、硬 件 配 置
✅ 主控设备:三菱FX3U PLC

✅ 编程软件:GX WORKS2(Version 1.576A)
✅ 伺服系统:松下伺服驱动器 + 伺服电机 + 编码器线束
松下伺服控制系统包括:伺服驱动器、伺服电机、编码器线束如下图所示:
松下伺服驱动器:

伺服电机:

编码器线束:

✅ 调试工具:松下伺服专用调试软件
三、硬件接线详解(重中之重)
接线是伺服控制最容易出错的地方,一定要按手册规范接线!
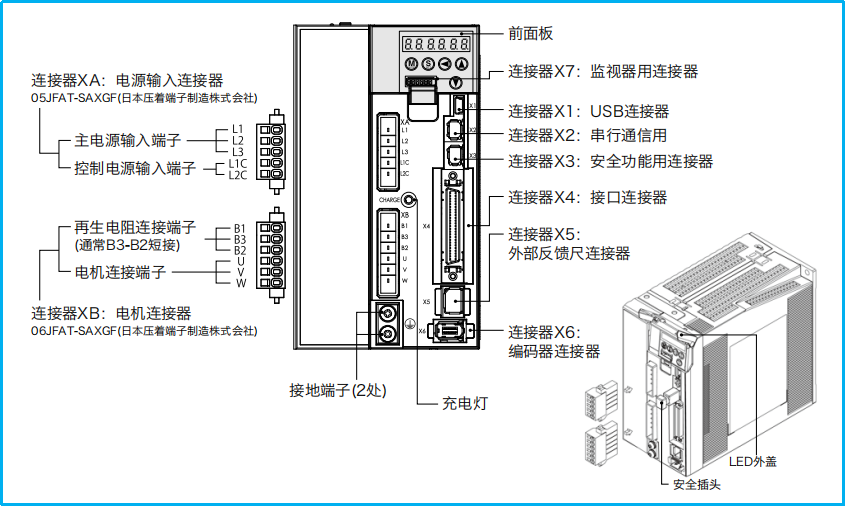
3.1 伺服驱动器的接线说明 :
主回路:电源线、动力线(电机供电)
控制回路:信号控制线、编码器线
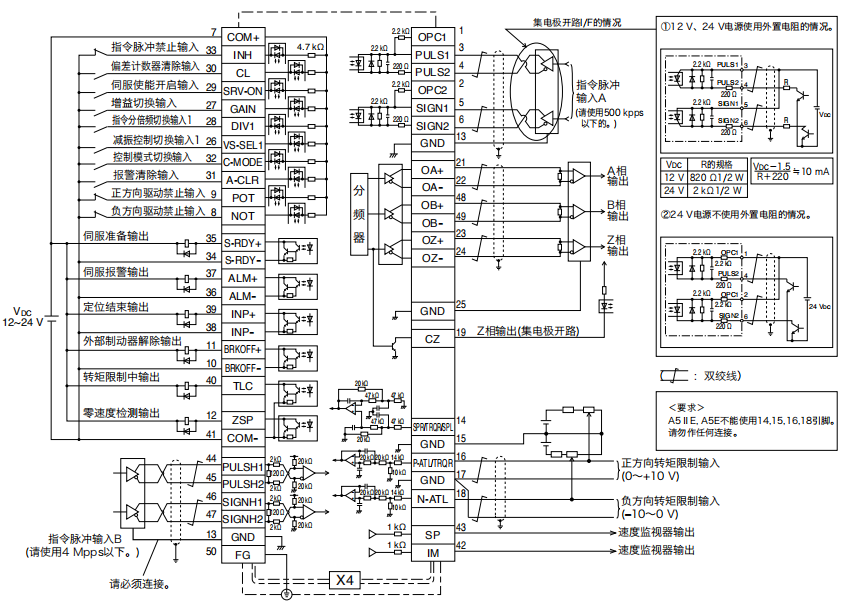
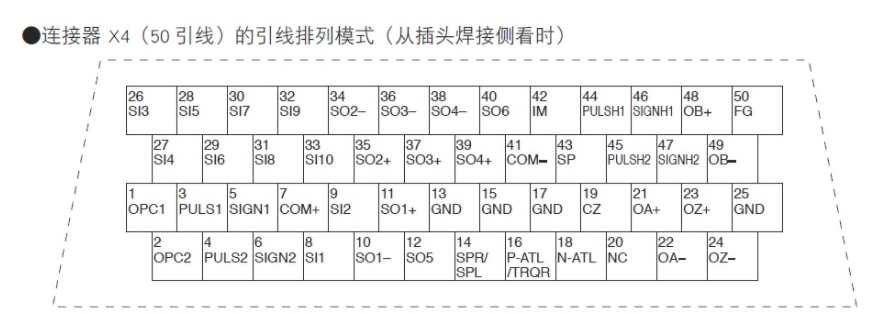
3.2 连接器 X4 的配线图
X4为伺服控制信号接口,包含:脉冲、方向、使能、报警、原点信号,所有弱电信号线全部接在此连接器。
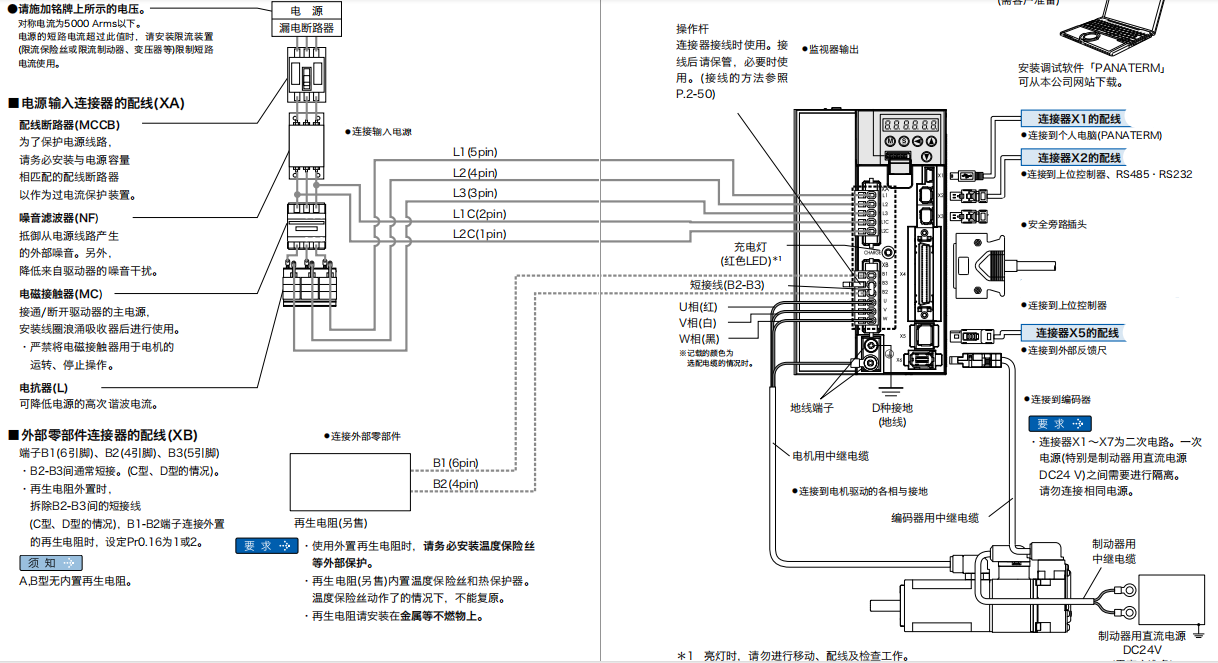
3.3 伺服驱动系统的全体配线图
包含驱动器供电、电机动力线、编码器反馈线、PLC信号线,全部走线可参考《松下伺服官方手册》。
【详见Panasonic伺服驱动器手册】
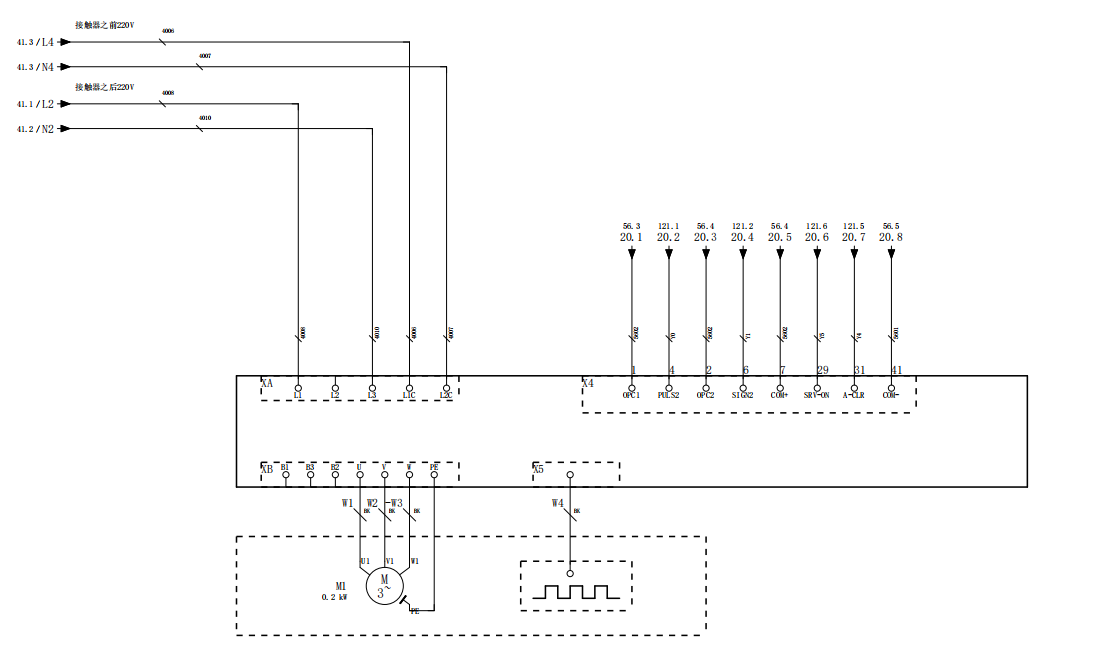
3.4 PLC 与伺服 I/O 接线(核心)
FX3U与松下伺服必须接好4大信号:
脉冲信号:控制电机行走距离
方向信号:控制电机正反转
伺服使能:电机上锁、允许运行
报警复位:故障清除、解除报警
四、实现功能步骤
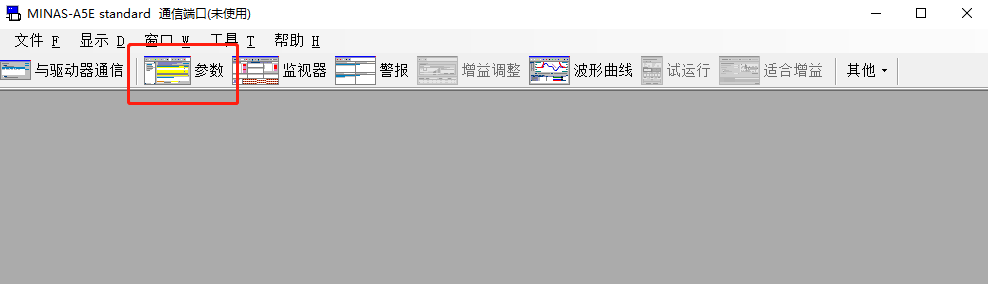
4. 1. 伺服软件 连接伺服驱动器
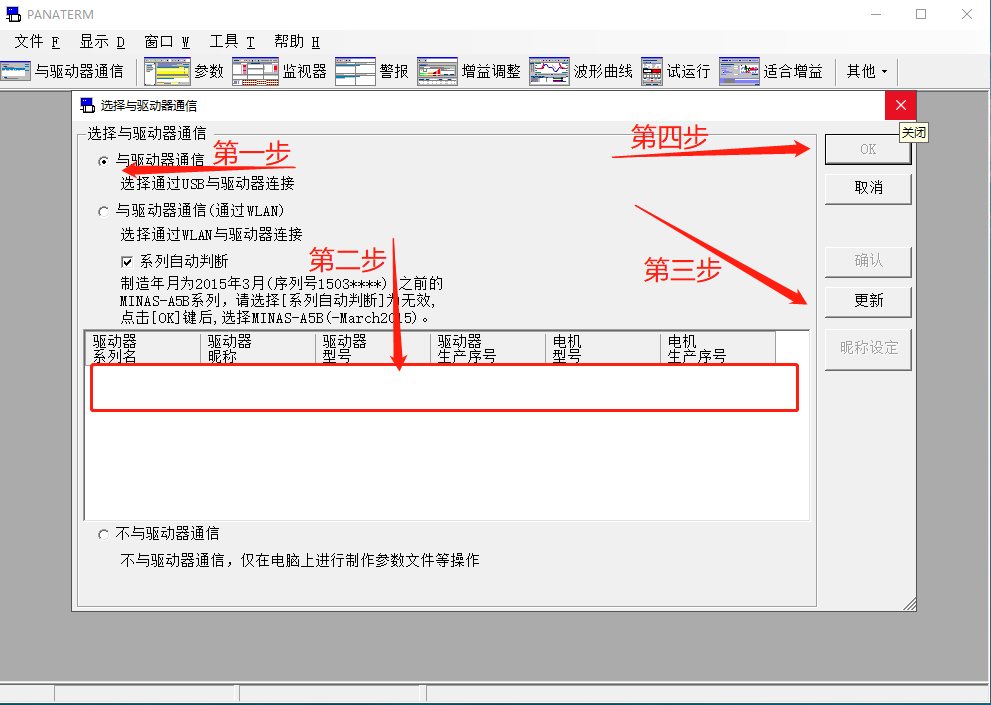
按上图所示步骤,第一步选择"与驱动器通信",确认第二步的红框内是否是自己连接所要设置的驱动器信息,如果不是,按第三步的"更新"按钮,最后选择第四步的"OK"就可以了。
4. 2. 伺服驱动器参数设置
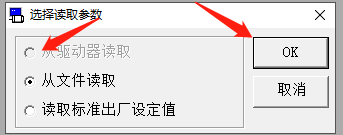
4.2.1通讯成功后,点击参数按钮。
4.2.2点击从驱动器读取,再点击ok按钮。
4.2.3点击下拉选项可以设置不同的控制模式,这里选用的是位置控制模式。
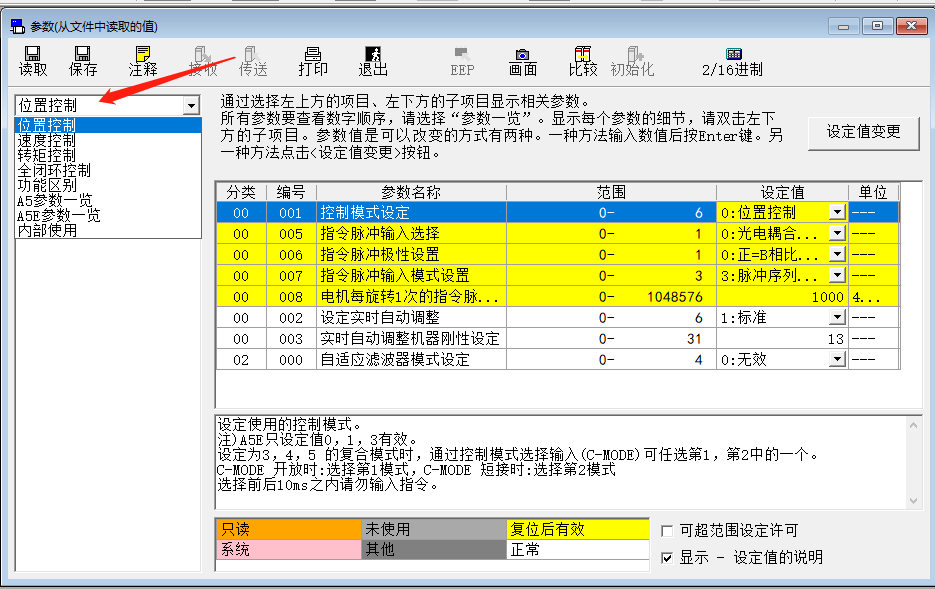
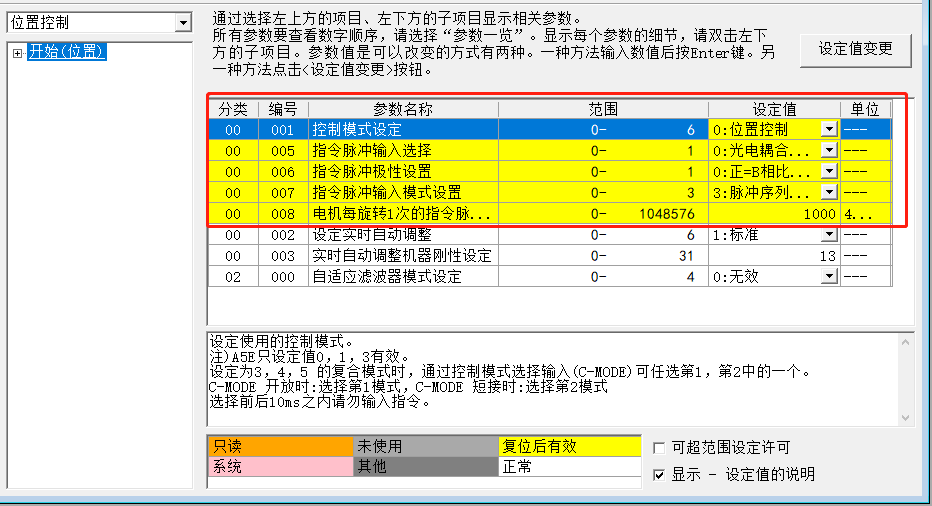
上图红框中显示的是需要设置的参数,
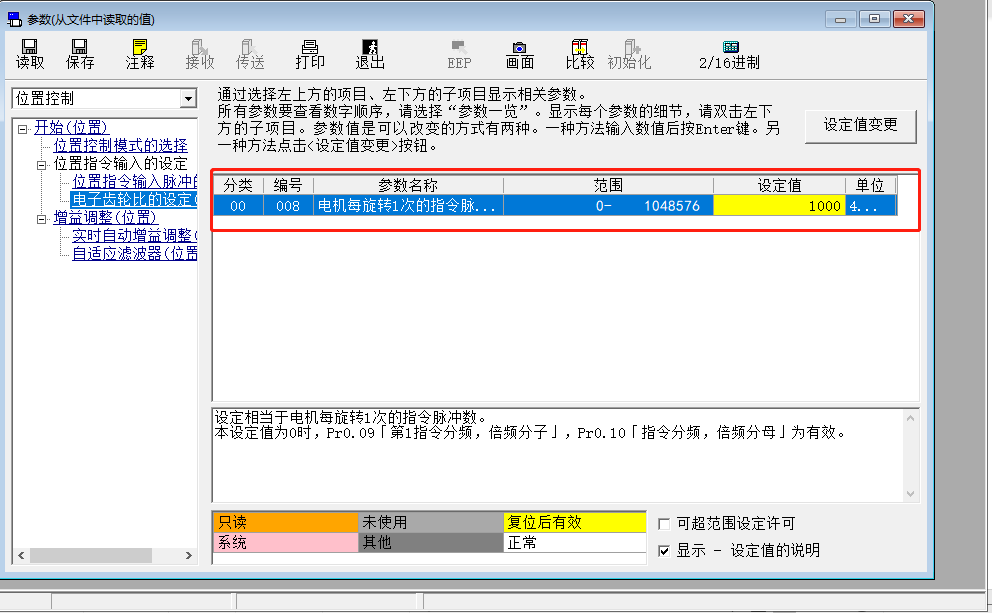
电子齿轮比需要重点设置,有关于电机的转速。
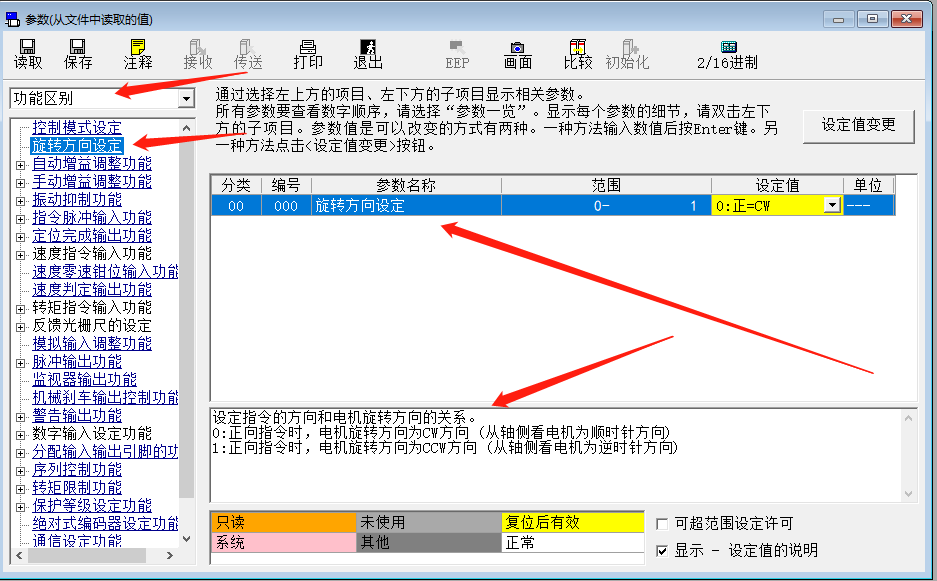
再一个就是设置电机的运行方向,在"功能区别"里找到"旋转方向设定"选项,根据所需要的方向来设定伺服的方向。
4. 3 三菱 PLC 程序编写
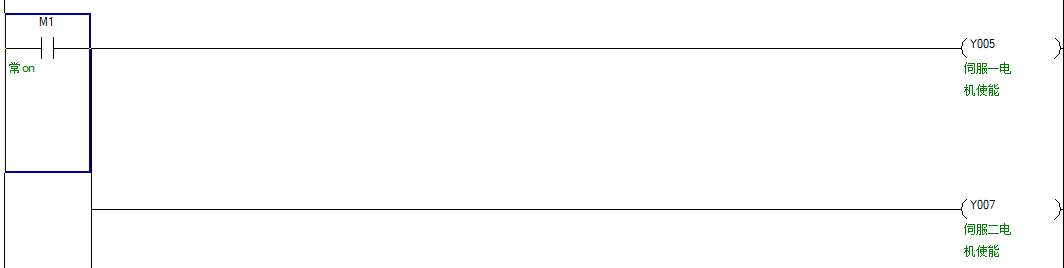
设定伺服使能,如果不给伺服使能信号,电机不能正常运转并且可以手动转动,易出现危险。
4.3.1定位指令:

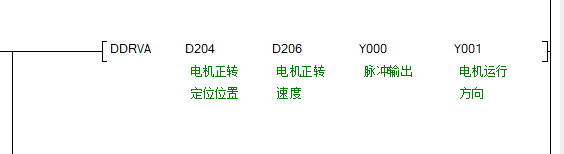
直接用plc来给伺服驱动器脉冲信号,需要使用DRVI(相对定位)和DRVA(绝对定位)指令,设定好电机的转速和位置后就可以执行电机定位运动。(使用了数据寄存器来设置位置和速度)。
【详细介绍参考三菱指令编程手册】

这里的回原点指令使用了外部信号来作为近点信号和零点信号,也可以使用驱动器内部的参数设置原点位。
【详见Panasonic伺服驱动器手册】
可以设定伺服电机的报警解除信号来解除电机的报警,详见之前的配线操作。
五、项目通用性总结
5.1 调试注意事项
-
在控制伺服过程中,修改电子齿轮比就可以调节伺服运行速度;
-
在第一次动作时,一定要低速!低速!低速!避免因为速度设置的过大导致伺服撞机;
5.2 伺服单向运转调整方法
如果电机只往一个方向动作,要在前面板上更改参数。
-
驱动器面板按【M键】,切换至PR0.00;
-
上下按键调节参数Pr0.00到Pr0.06;
-
按【S键】修改参数值(Pr0.06参数设定范围0/1,出厂设定为0。
5.3 电机转向反转设置
-
Pr0.06参数:0=正转 / 1=反转,出厂默认0;
-
修改完成后按M键直到显示EESET;
-
长按向上键保存:
✅ 显示finish:无需重启直接生效
✅ 显示ready:需要断电重启