前言
本实例表明,使用abaqus进行拓扑优化过程中,可以使用内力或者支反力作为设计响应。
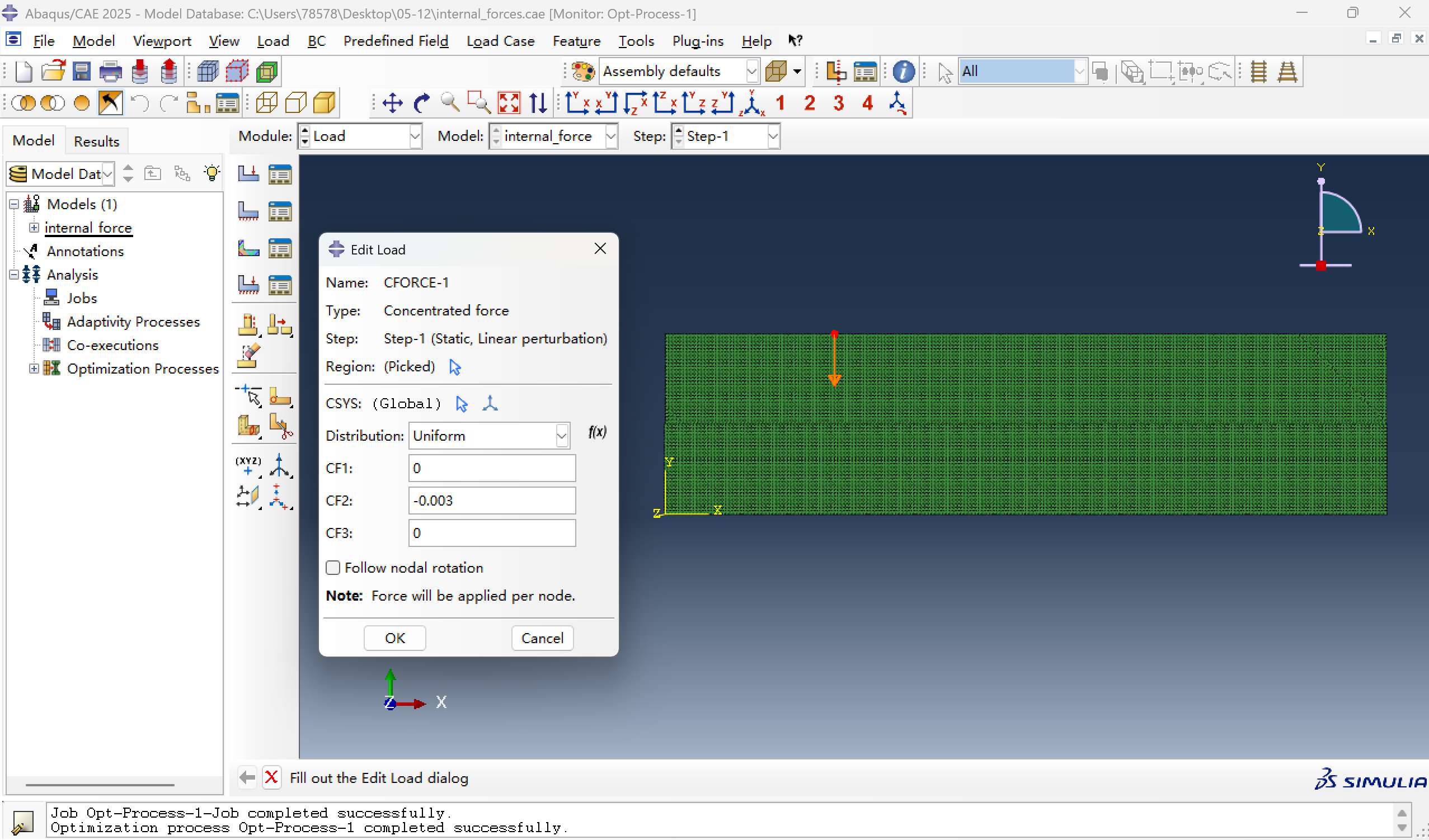
载荷:节点Node-51273承受沿Y轴负方向0.003N的载荷。
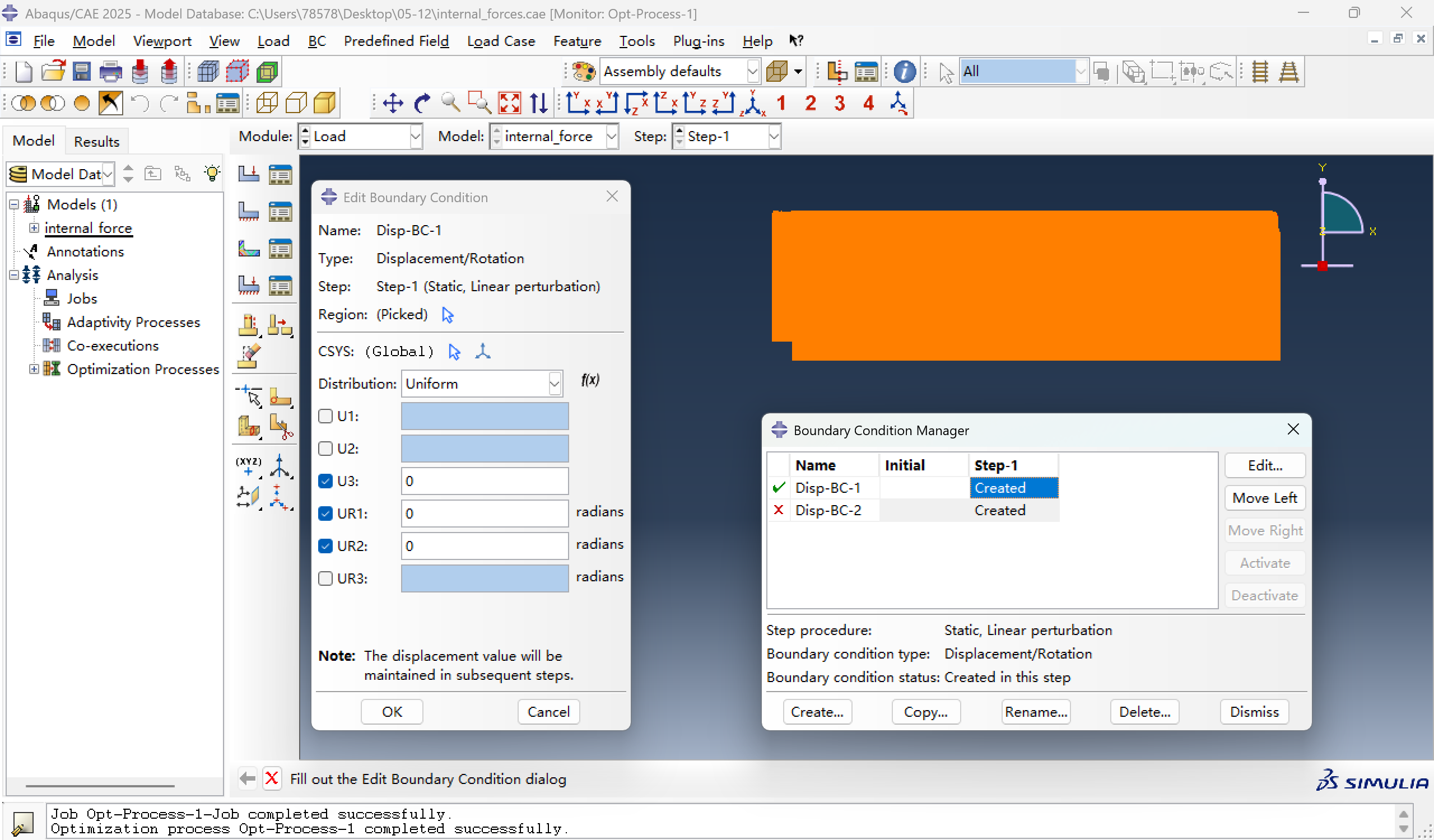
约束1:所有节点限制平面运动(U3=UR1=UR2=0)。
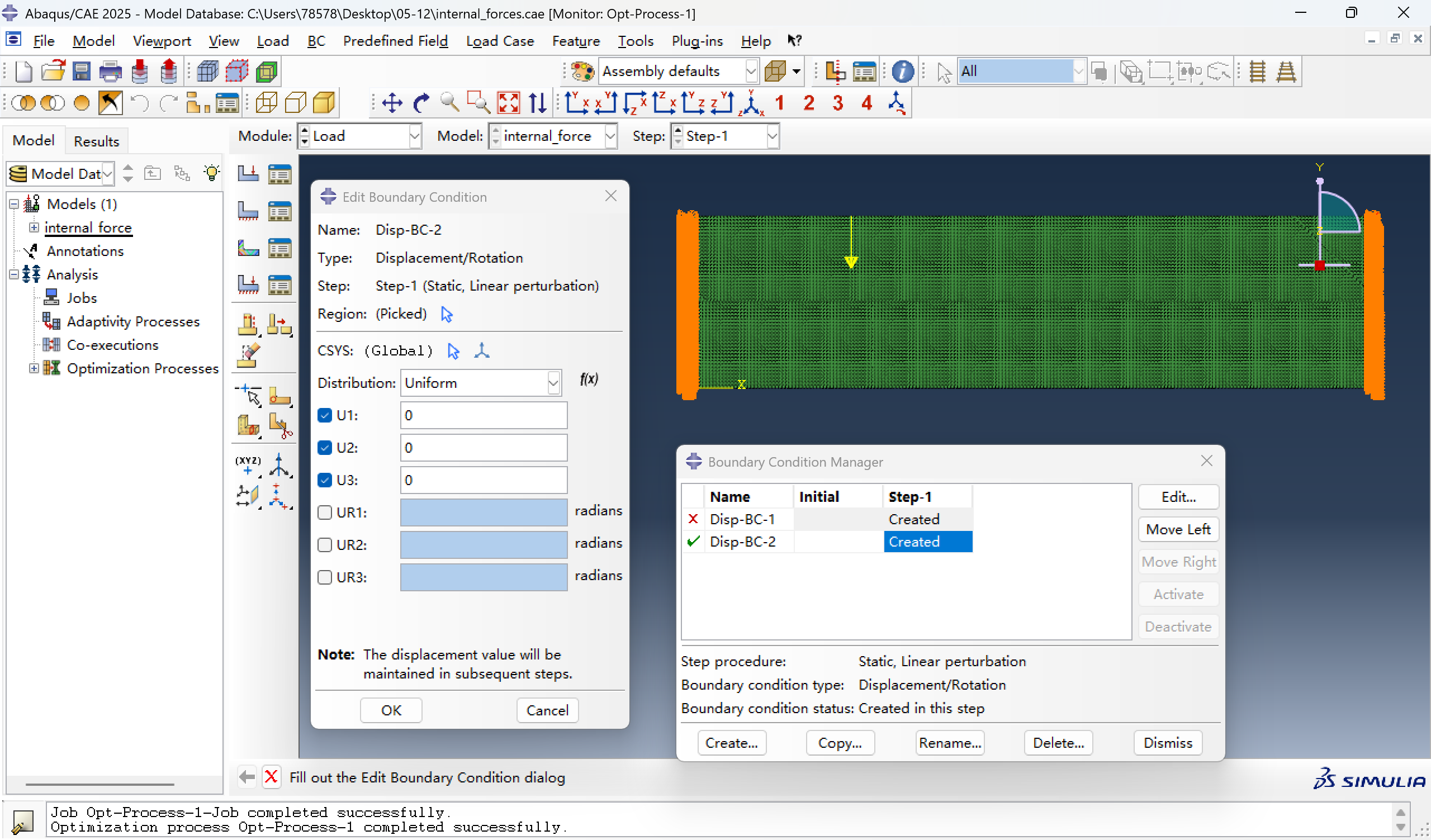
约束2:左右两侧端面节点固定位移(U1=U2=U3=0)。
本页讨论
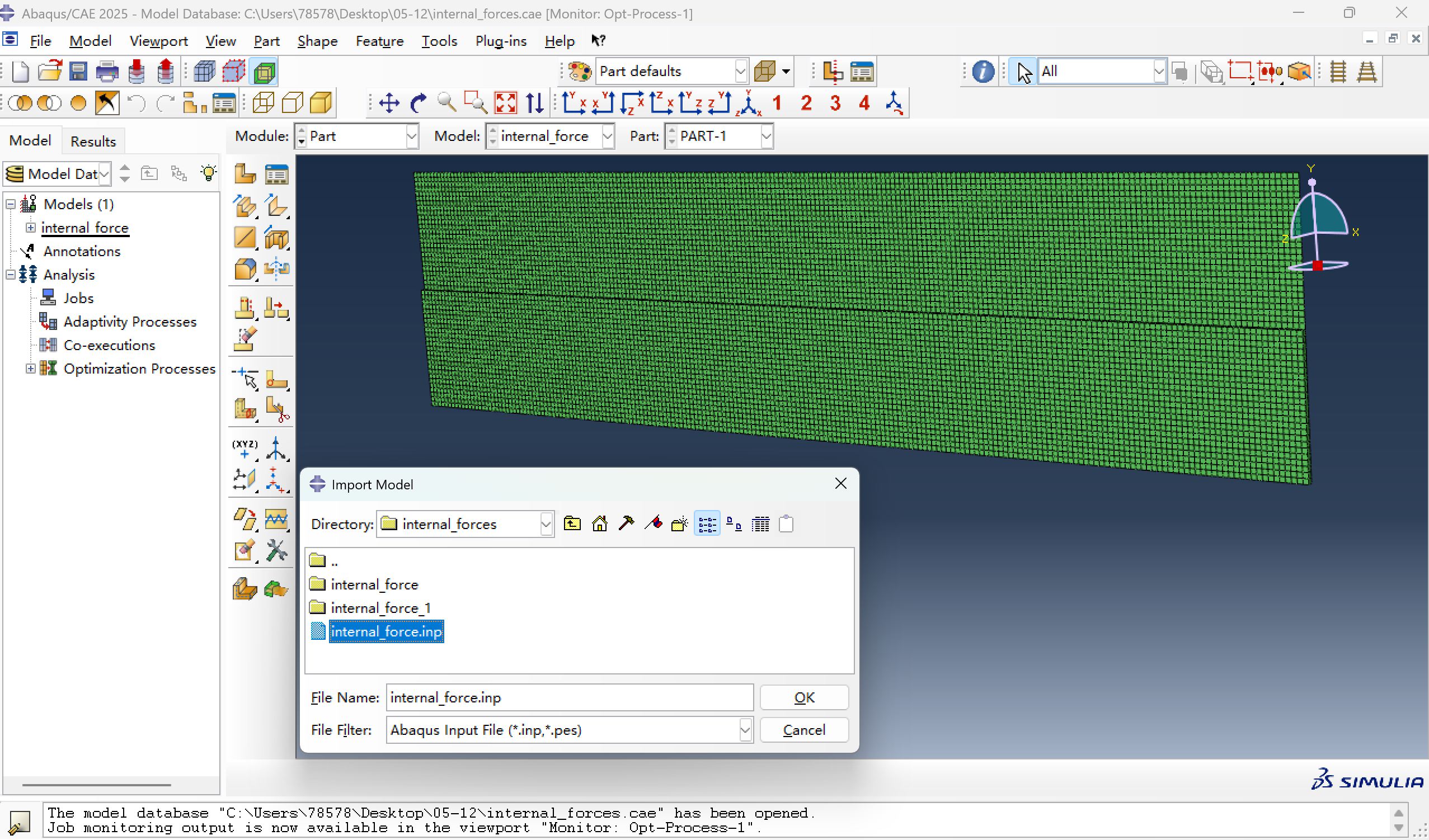
一、导入internal_force.inp文件
二、设置优化
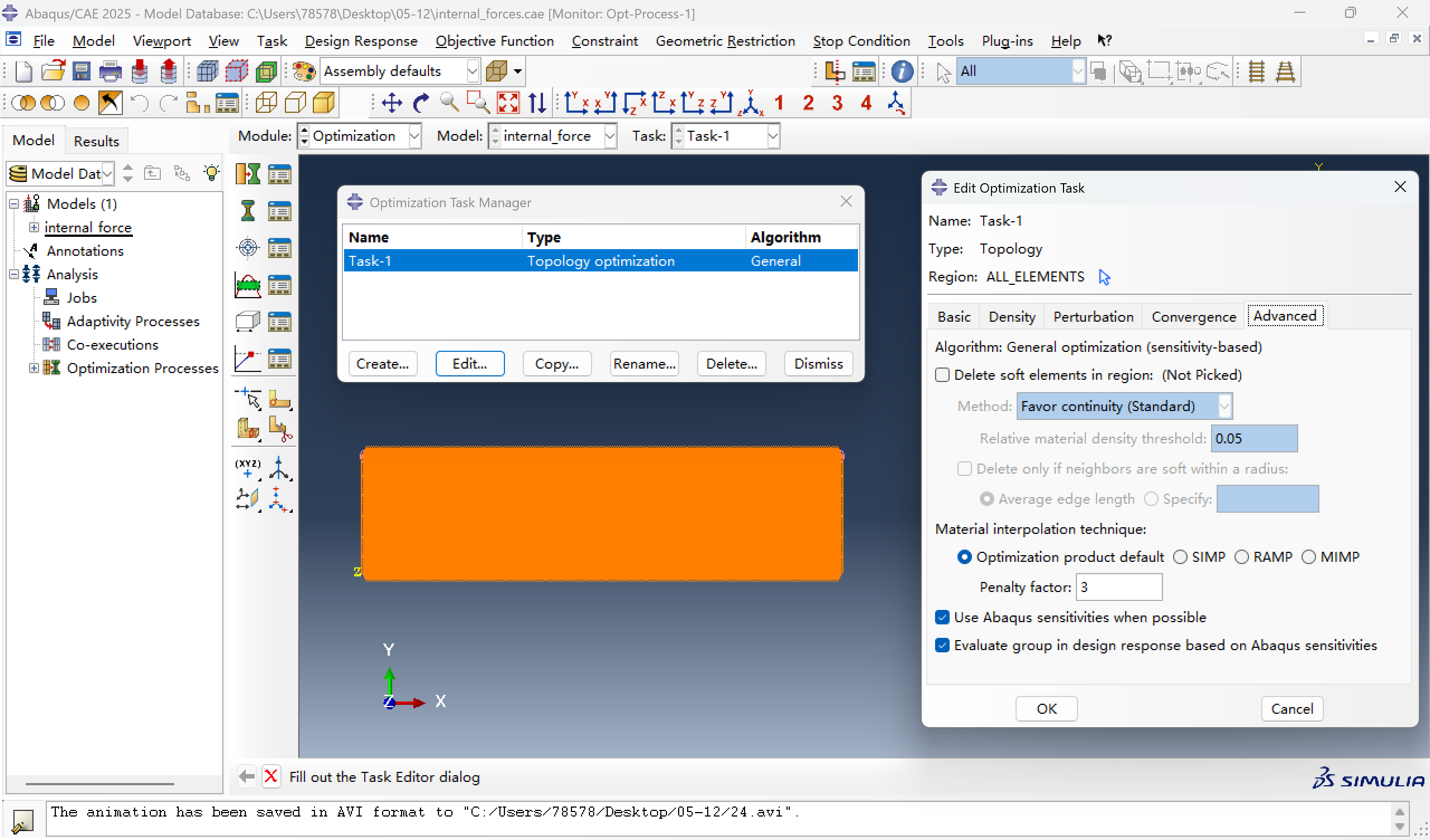
1.创建优化任务
在OPTIMIZATION模块,创建基于灵敏度的拓扑优化任务Task-1。
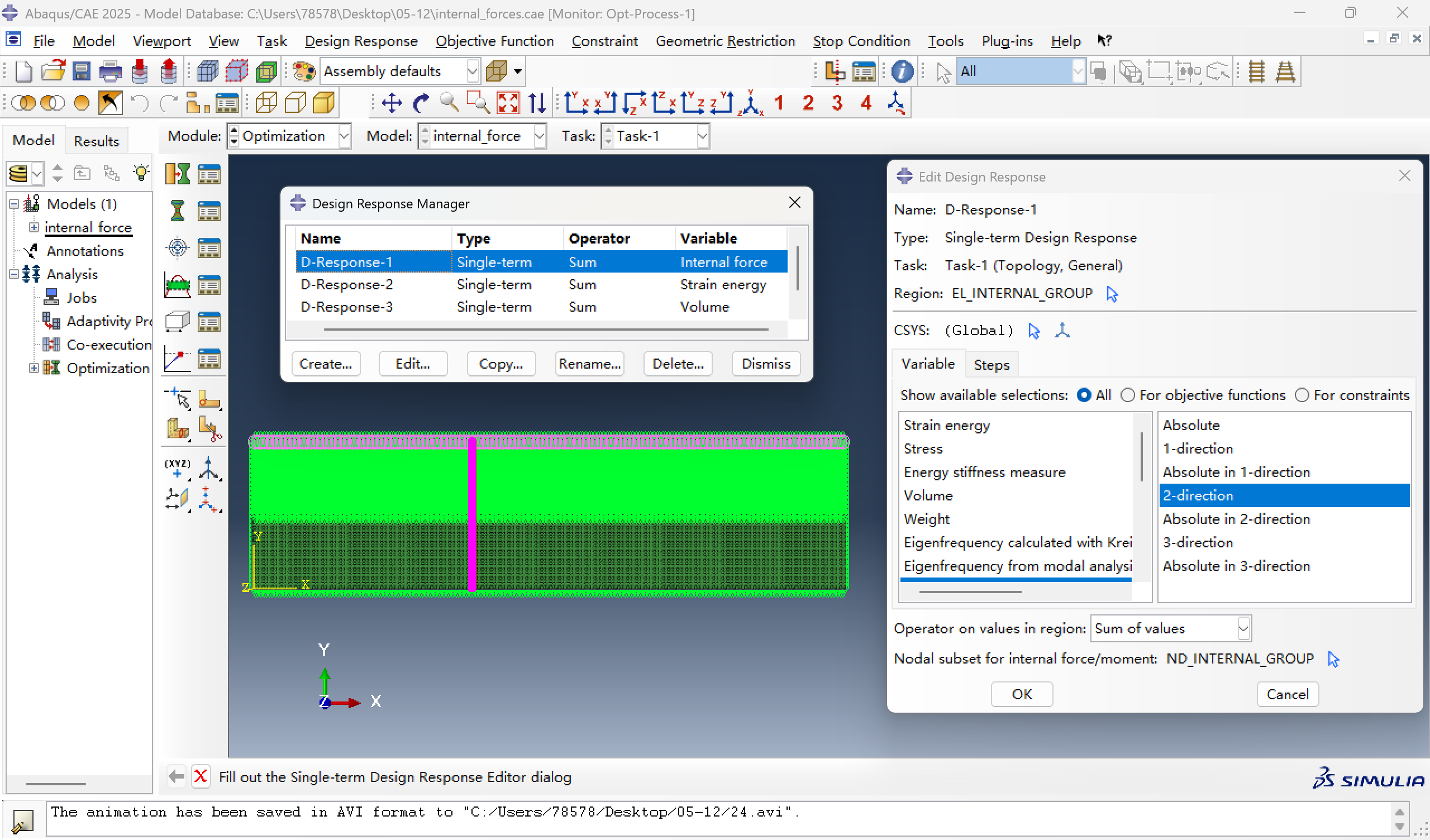
2、创建设计响应
- 定义内力的设计响应D-Response-1:集合ND_INTERNAL_GROUP中所有节点沿Y方向的内力总和。
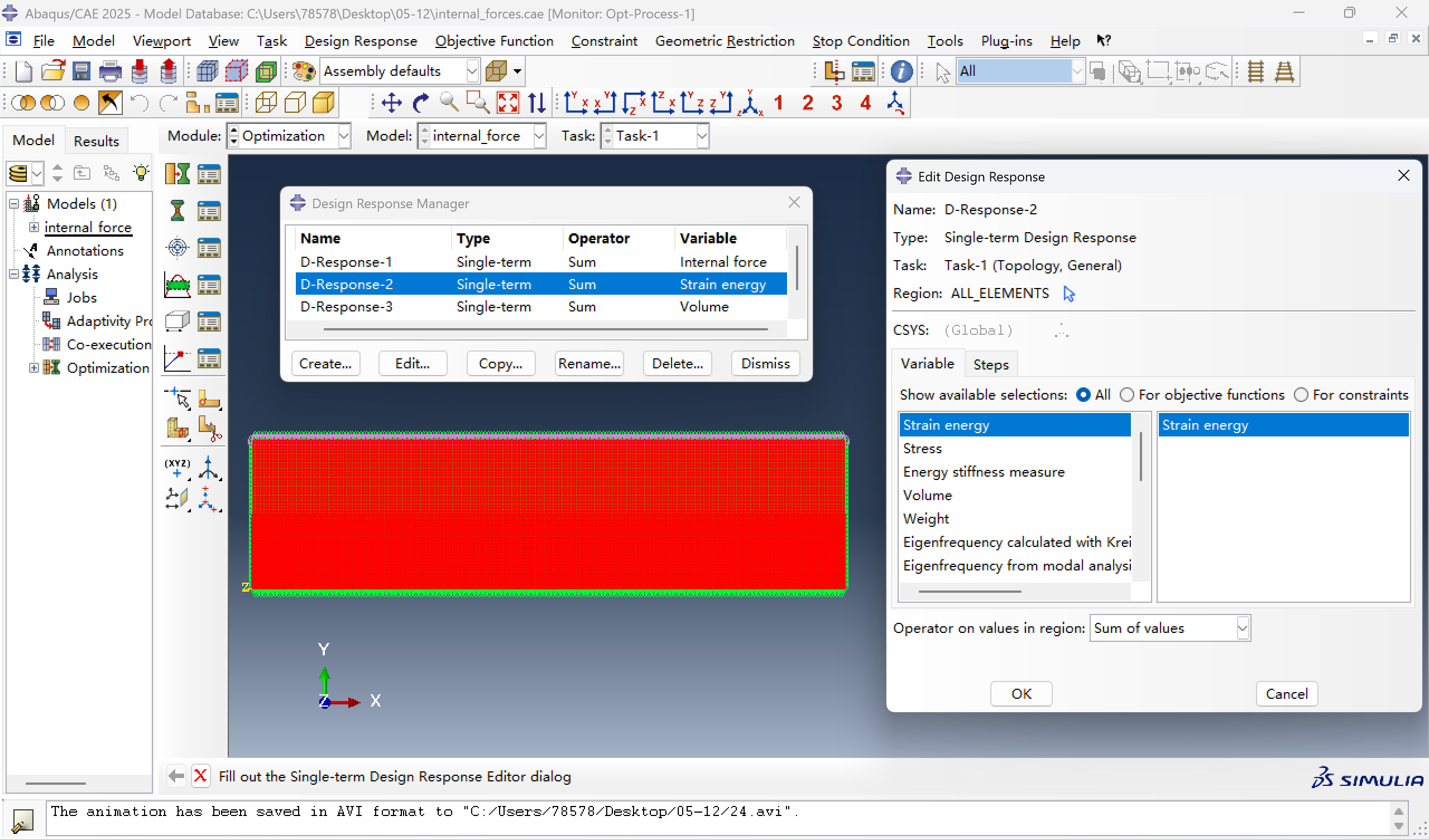
- 定义应变能的设计响应D-Response-2:设计区域中所有单元的应变能总和。
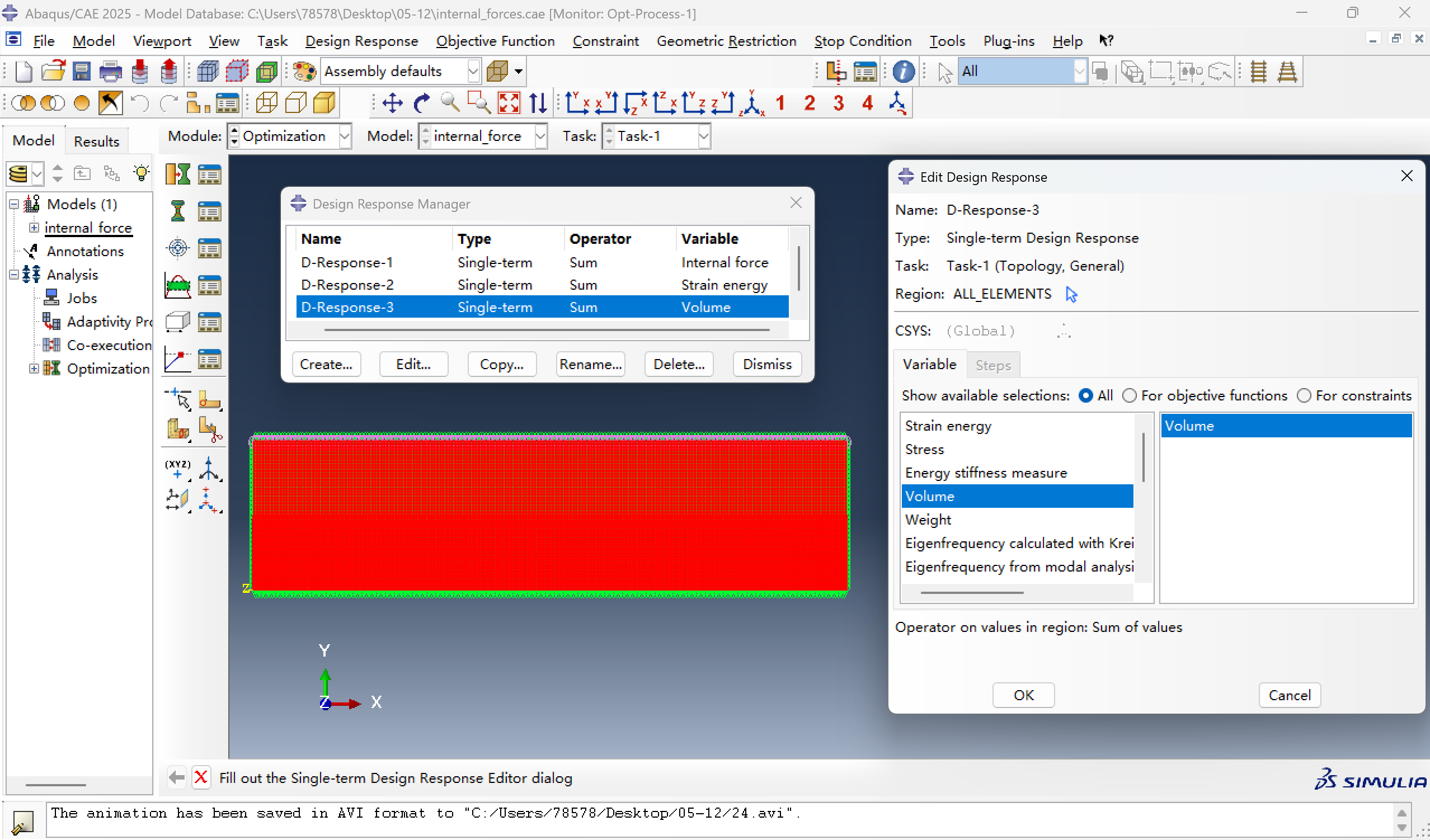
- 定义体积的设计响应D-Response-3:设计区域中所有单元的体积总和。
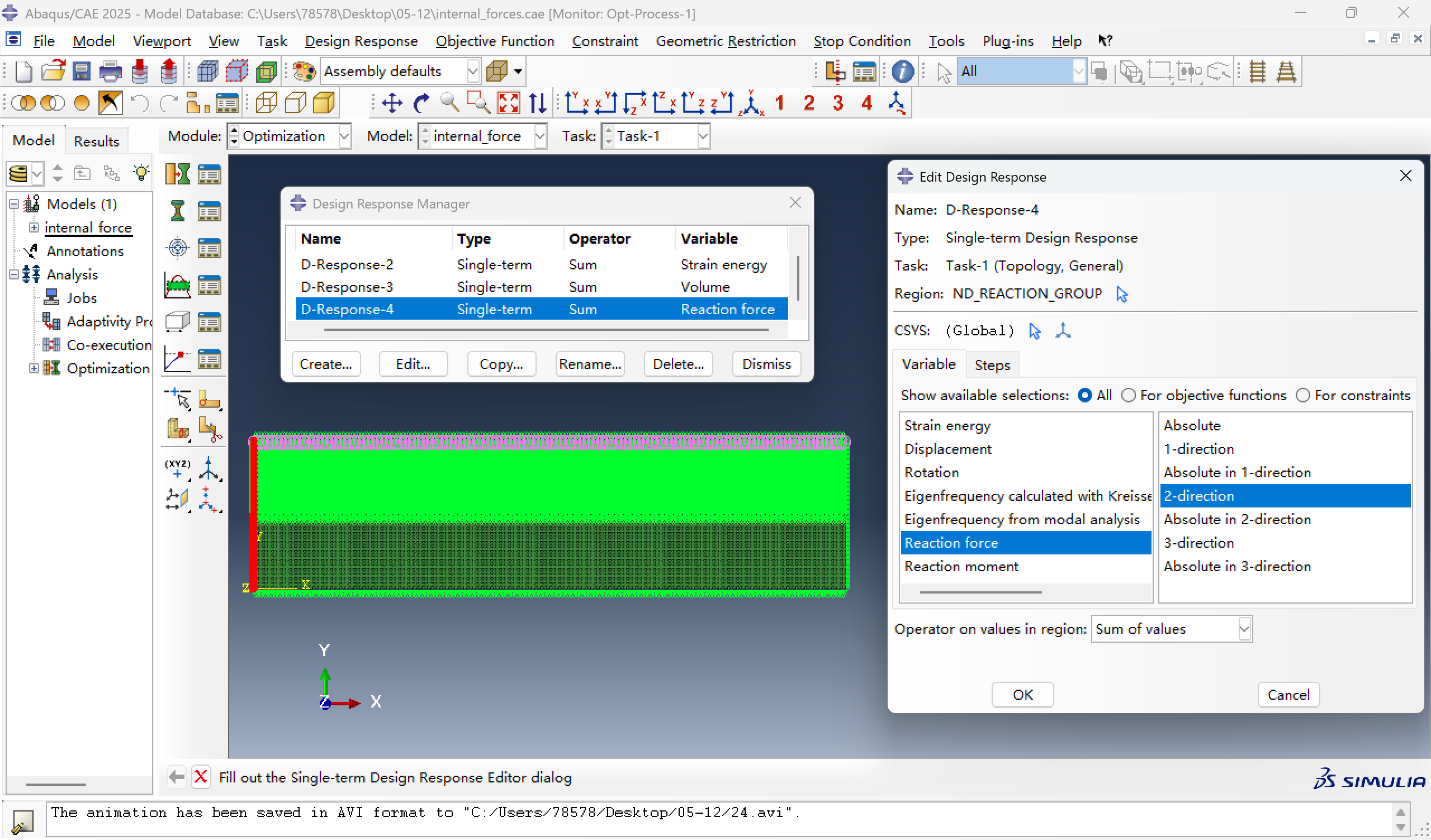
- 定义支反力的设计响应D-Response-4:集合ND_REACTION_GROUP中所有节点沿Y方向的支反力总和。
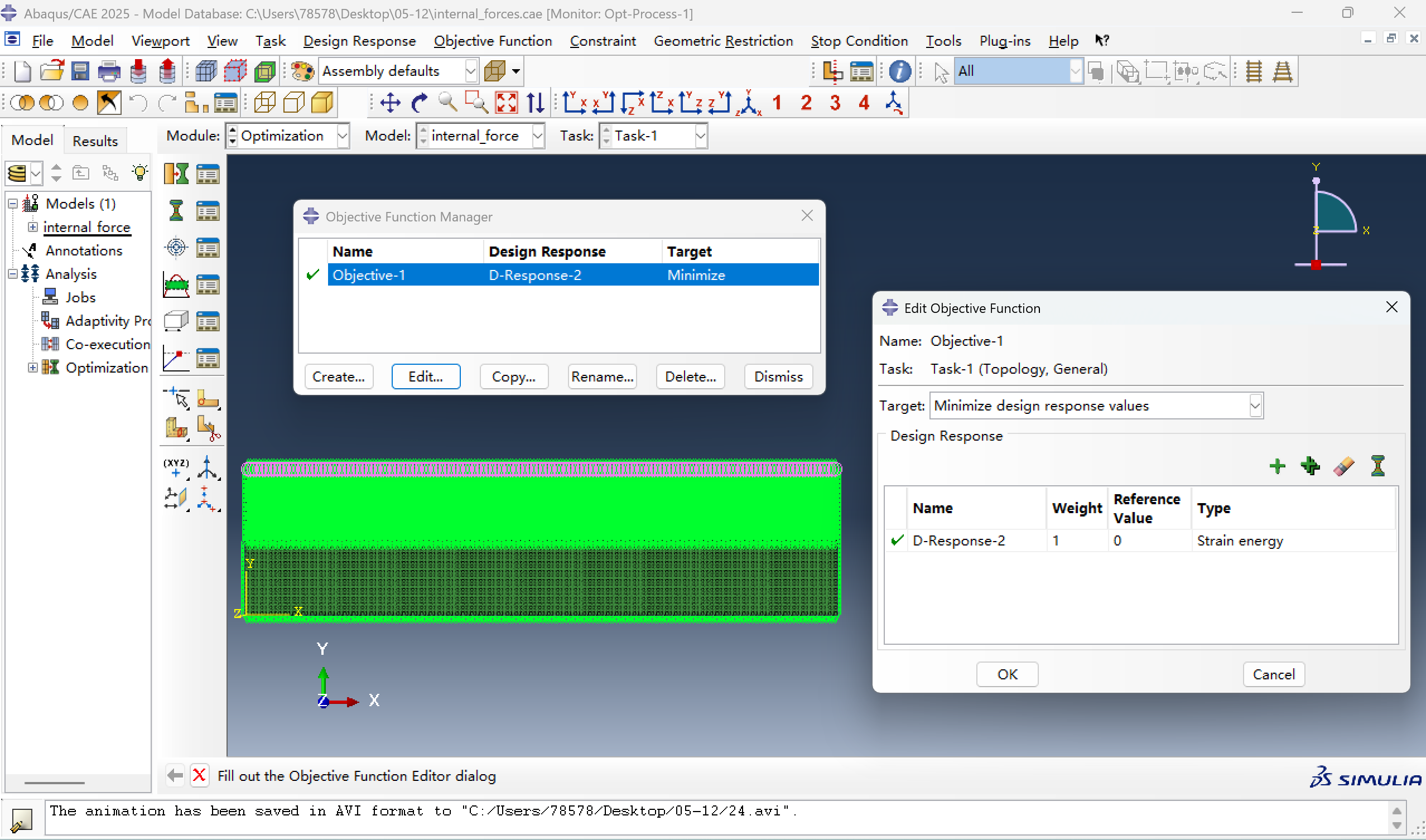
3、创建目标函数
最小化模型的应变能总和:设计区域中所有单元的应变能总和D-Response-2。
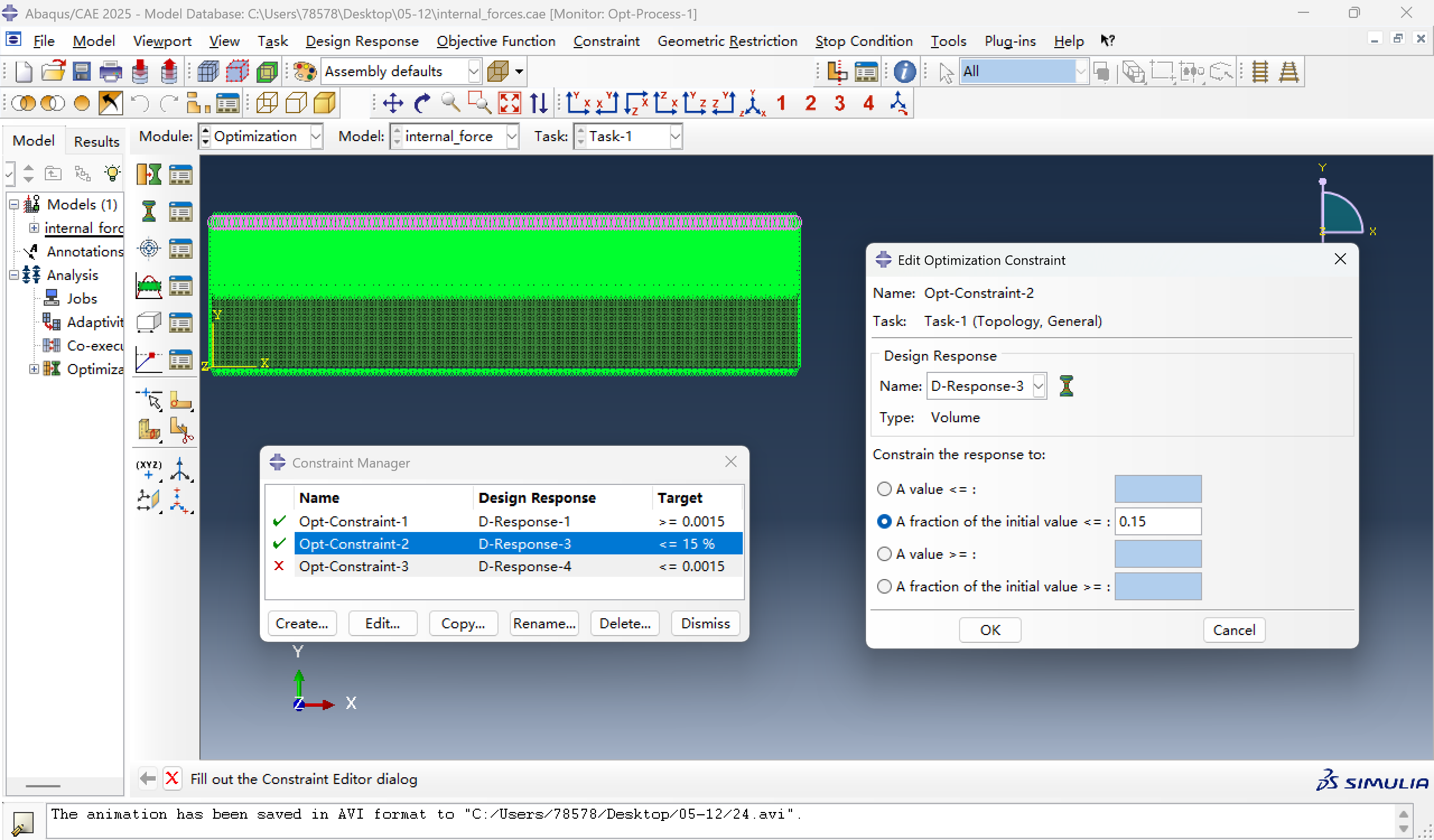
4、创建约束
- 限制集合ND_INTERNAL_GROUP中所有节点内力总和的设计响应D-Response-1≥0.0015。
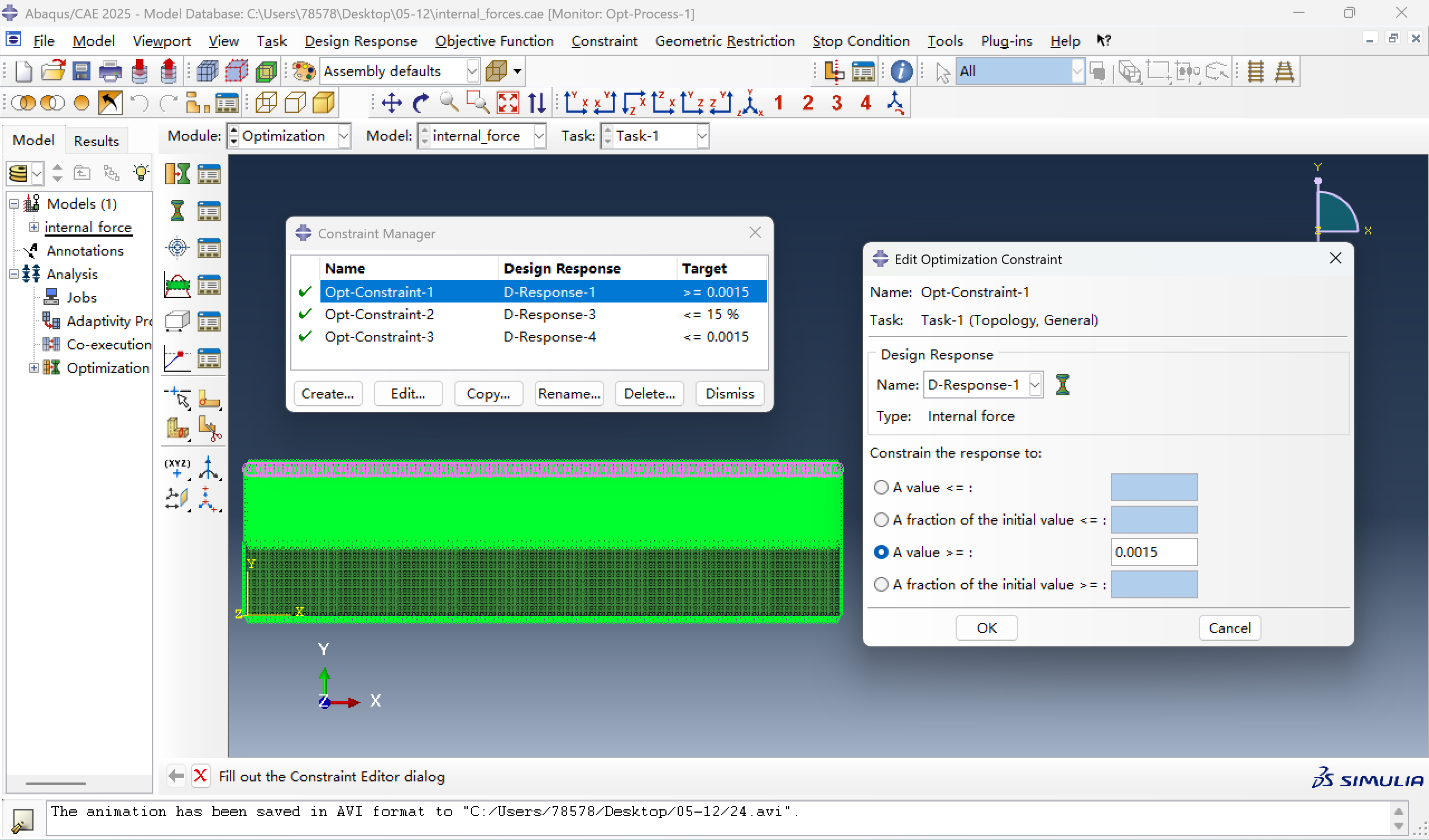
- 限制优化后模型体积应≤原始模型体积的15%。
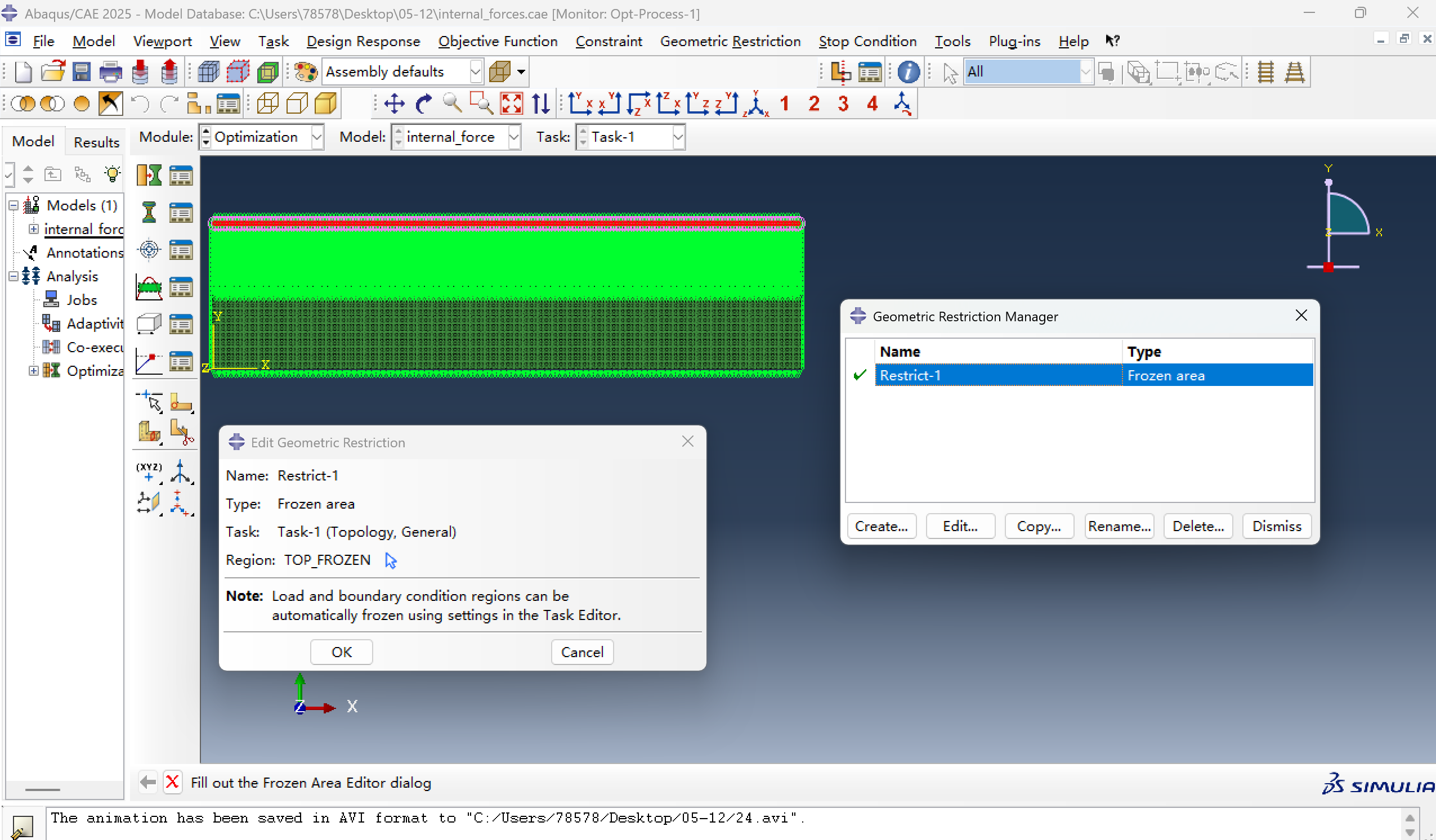
5、创建几何约束
设置表面一层单元TOP_FROZEN为冻结区域。
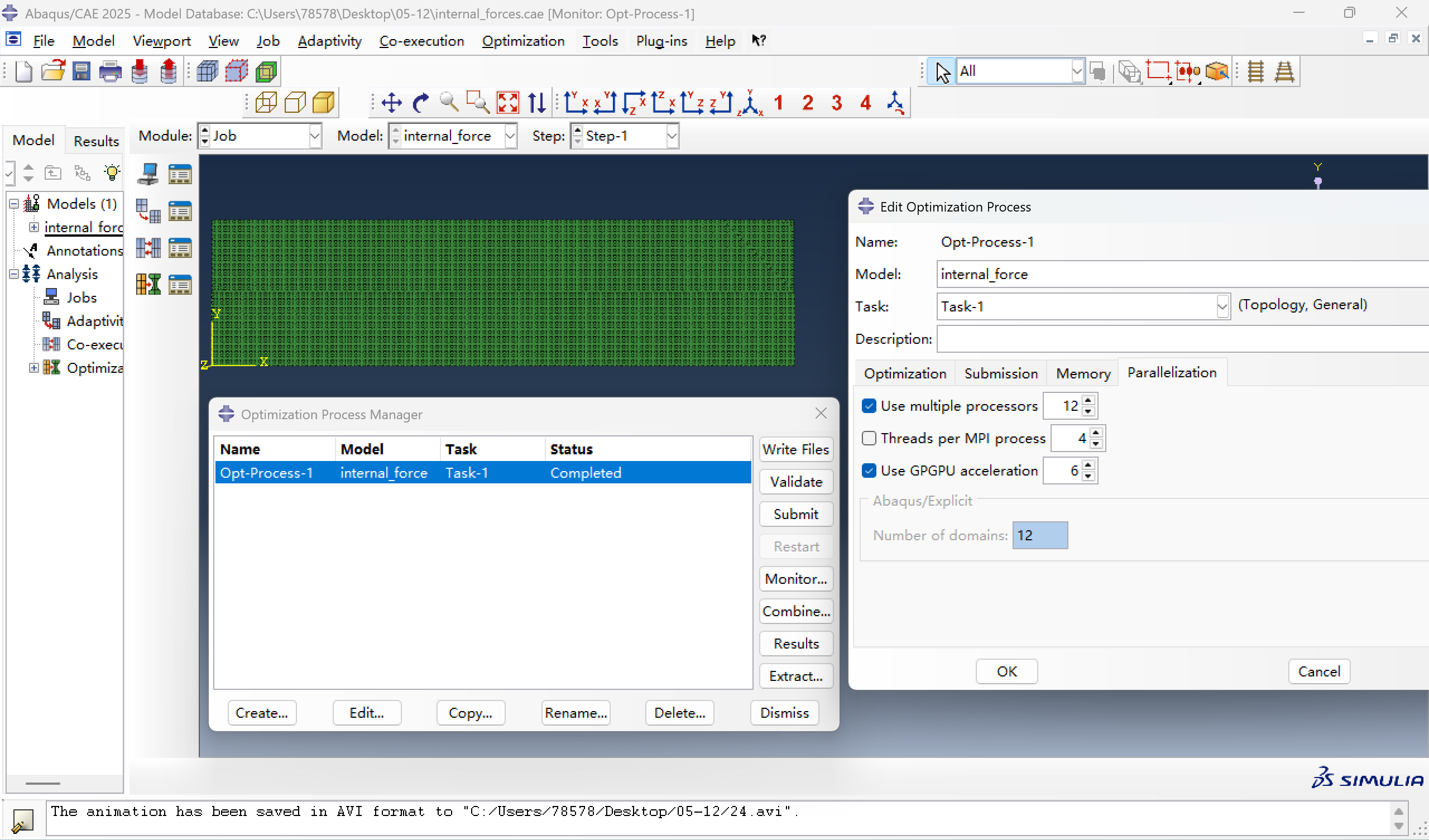
6、创建并提交优化进程
在JOB模块,创建优化进程Opt-Process-1。
7、优化结果