关键版本:Python 3.11、IsaacSim 5.0、IsaacLab 2.2
系统信息:ubuntu1~22.04.3、x84架构、50系列显卡
参考1:https://github.com/isaac-sim/IsaacSim/tree/v5.0.0
参考2:https://github.com/isaac-sim/IsaacLab/tree/main
参考3:https://isaac-sim.github.io/IsaacLab/main/source/setup/installation/source_installation.html
1、显卡驱动安装
50系列的显卡,推荐安装nvidia-driver-xxx-open,成功率比较高
如果不带-open的,大多数都无法找到显卡设备的
推荐安装 nvidia-driver-575-open 版本,兼容 IsaacSim 4.5、5.0、6.0(测试过了)
一直开始安装了最新版本,nvidia-driver-595-open版本,在 IsaacSim 5.0 和IsaacSim 4.5老是闪退,报段错误...
1. 卸载专有驱动的元包(可选,如果安装了其他版本,先卸载)
bash
sudo apt purge nvidia-driver-595 nvidia-dkms-595 nvidia-kernel-source-595 nvidia-kernel-common-5952. 安装开源内核版驱动
bash
sudo apt install nvidia-driver-575-open3. 重启生效
bash
sudo reboot重启后,再次运行 nvidia-smi 即可正常识别 GPU。
4. nvcc安装
若没有 nvcc,需要单独安装 CUDA Toolkit:
bash
sudo apt install nvidia-cuda-toolkit如果需要指定CUDA版本,跳过这步,自行安装即可~
2、源码安装 IsaacSim 5.0
1、下载代码
直接克隆指定版本代码,最新的IsaacSim版本是6.0,这里直接指定5.0的进行下载
bash
git clone -b v5.0.0 --depth 1 https://github.com/isaac-sim/IsaacSim.git IsaacSim_v5.0.0进行代码目录
bash
cd IsaacSim_v5.0.0然后执行下面两条命令,全局初始化 Git LFS 工具,下载相关文件
bash
git lfs install
git lfs pull2、创建Conda环境
创建名为 isaac_sim_5、Python3.11 的环境
bash
conda create -n isaac_sim_5 python=3.11 -y进入环境中
bash
conda activate isaac_sim_53、从源代码构建 IsaacSim
需要用到GCC/G++ 11,进行编译,版本查询命令:
bash
gcc --version
g++ --version打印信息示例:
gcc (Ubuntu 11.4.0-1ubuntu1~22.04.3) 11.4.0
g++ (Ubuntu 11.4.0-1ubuntu1~22.04.3) 11.4.0
执行的指令,进行编译:
bash
./build.sh打印信息:
Processing schema classes:
IsaacRobotAPI, IsaacLinkAPI, IsaacReferencePointAPI, IsaacJointAPI, IsaacSurfaceGripper, IsaacAttachmentPointAPI
Loading Templates from /home/liguopu/.cache/packman/chk/usd.py311.manylinux_2_35_x86_64.stock.release/0.24.05.kit.6-gl.14415+d9efdd65/lib/usd/usd/resources/codegenTemplates
unchanged /home/liguopu/lgp_dev/project/IsaacSim_v5.0.0/source/extensions/isaacsim.robot.schema/robot_schema/plugInfo.json
Generating Schematics:
unchanged /home/liguopu/lgp_dev/project/IsaacSim_v5.0.0/source/extensions/isaacsim.robot.schema/robot_schema/generatedSchema.usda
BUILD (RELEASE) SUCCEEDED
4、开启 IsaacSim
上面编译成功后,就可以开启 isaac-sim 了
bash
bash ./_build/linux-x86_64/release/isaac-sim.sh能看到打开一个窗口,加载IsaacSim5.0
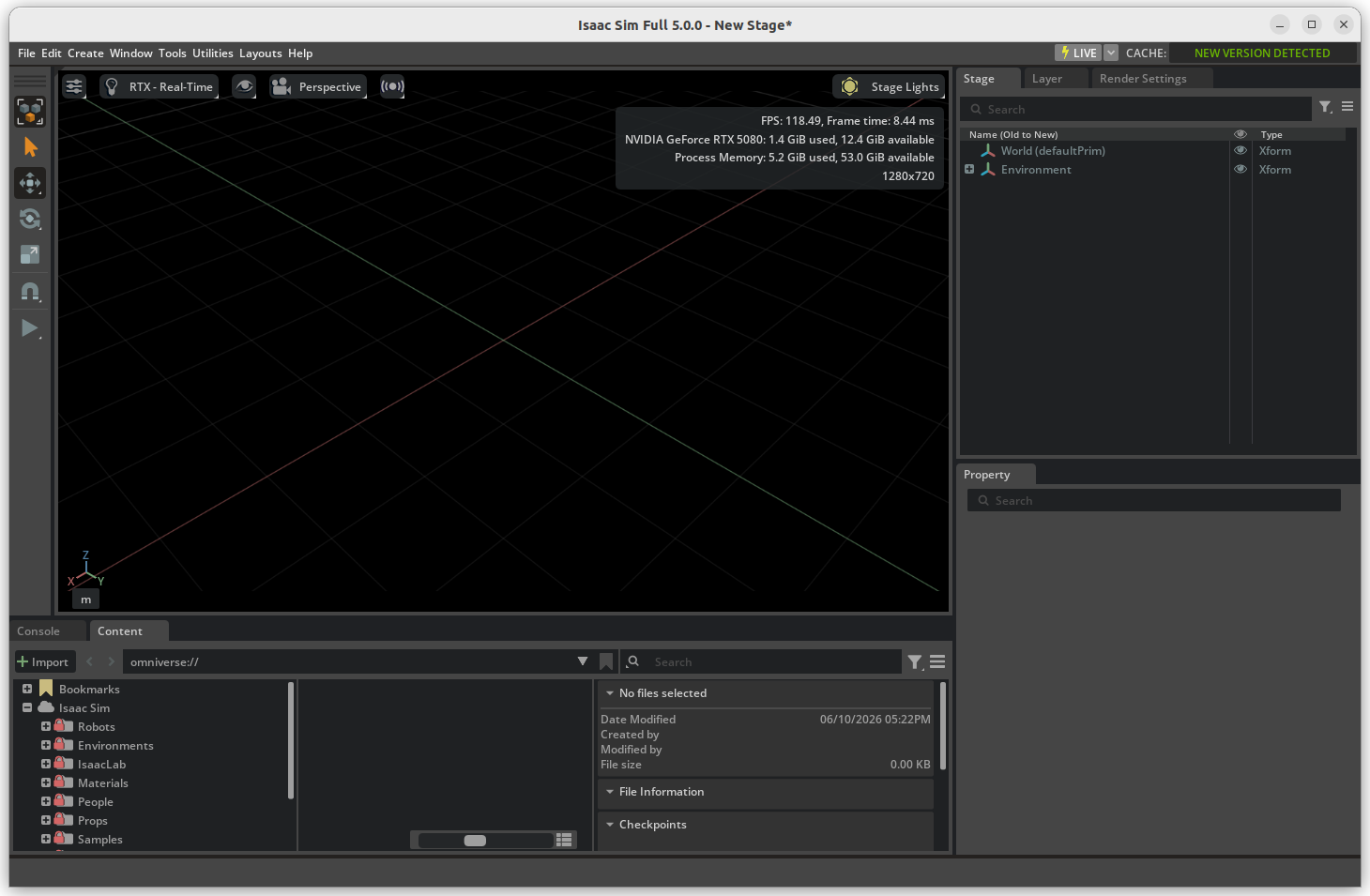
关键信息打印:
11.014s app ready
12.631s Isaac Sim Full App is loaded.
源码编译的IsaacSim_v5比较稳定,很少出现闪退情况~
5、安装 IsaacLab 2.2
1、首先下载代码
bash
# 1. 完整克隆整个仓库(包含所有分支、全量提交历史、所有tag)
git clone https://github.com/isaac-sim/IsaacLab.git
cd IsaacLab
# 2. 拉取远程所有版本标签(本地仓库同步远程全部tag,确保能找到v2.2.0)
git fetch --tags
# 3. 切换锁定v2.2.0发布版本,进入detached HEAD分离头指针
git checkout v2.2.02、安装 依赖库
bash
sudo apt install cmake build-essential3、安装 IsaacLab
运行安装命令,该命令会遍历source目录中的所有扩展程序,并使用 pip安装:
bash
./isaaclab.sh --install成功安装后,打印信息:
Successfully installed isaaclab_mimic-1.0.12 psutil-7.2.2
INFO Setting up vscode settings...
4、安装过程报错解决
逐步排查问题:
bash
# 安装 isaaclab 核心包,看看那个出错了,逐个解决
pip install -e source/isaaclab
pip install -e source/isaaclab_mimic
pip install -e source/isaaclab_rl
pip install -e source/isaaclab_tasksA、如果安装出现flatdict报错
用 --no-build-isolation 绕过 pip 的隔离构建环境,直接用当前环境的进行安装:
bash
pip install --no-build-isolation flatdict==4.0.1B、如果出现setuptools版本太高了
需要指定安装低版本的 setuptools
bash
pip install "setuptools<=70"6、建立 IsaacSim 与 IsaacLab 的链接
需要确认IsaacSim_v5.0.0的安装目录,然后进行指定即可
1、单次窗口有效
bash
# 1、创建指向 IsaacSim 5.0 的软链接
ln -s ~/lgp_dev/project/IsaacSim_v5.0.0/_build/linux-x86_64/release _isaac_sim
# 2、加载 IsaacSim 环境配置
source _isaac_sim/setup_conda_env.sh
# 3、验证 isaacsim 可导入
python -c "import isaacsim; print('isaacsim 导入成功')"2、永久有效
编辑 bash 配置文件,把配置写到 ~/.bashrc 中
bash
vim ~/.bashrc在文件末尾,新添加内容:
其中,~/lgp_dev/project/IsaacLab 改为自己的IsaacLab路径即可,其他不变
bash
# IsaacSim 5.0.0 全局环境自动加载
export ISAACLAB_ROOT=~/lgp_dev/project/IsaacLab
export ISAACSIM_PATH=$ISAACLAB_ROOT/_isaac_sim
# 自动加载isaacsim conda环境脚本
if [ -f "$ISAACSIM_PATH/setup_conda_env.sh" ]; then
source "$ISAACSIM_PATH/setup_conda_env.sh"
fi7、验证 IsaacSim 与 IsaacLab
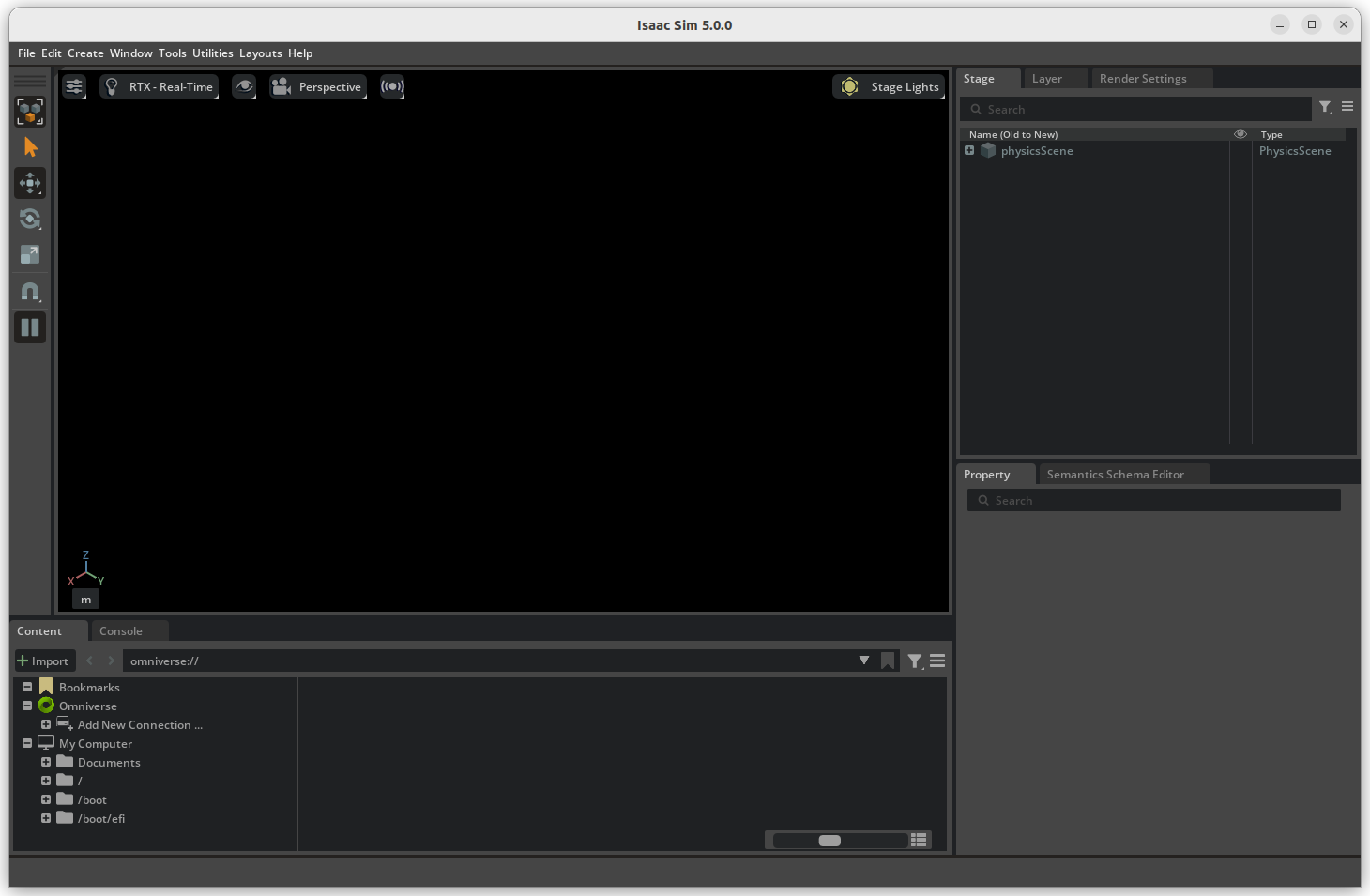
1、示例1,打开仿真窗口
创建一个空的仿真窗口,验证是否正常:
bash
# Option 1: Using the isaaclab.sh executable
./isaaclab.sh -p scripts/tutorials/00_sim/create_empty.py
# Option 2: Using python in your virtual environment
python scripts/tutorials/00_sim/create_empty.py打印信息:
python
(isaac_sim_5) liguopu@liguopu-System-Product-Name:~/lgp_dev/project/IsaacLab$
(isaac_sim_5) liguopu@liguopu-System-Product-Name:~/lgp_dev/project/IsaacLab$ python scripts/tutorials/00_sim/create_empty.py
.....
[8.121s] app ready
.....
[9.901s] Simulation App Startup Complete
[9.967s] [ext: omni.physx.fabric-107.3.18] startup
[INFO]: Setup complete...可视化界面:
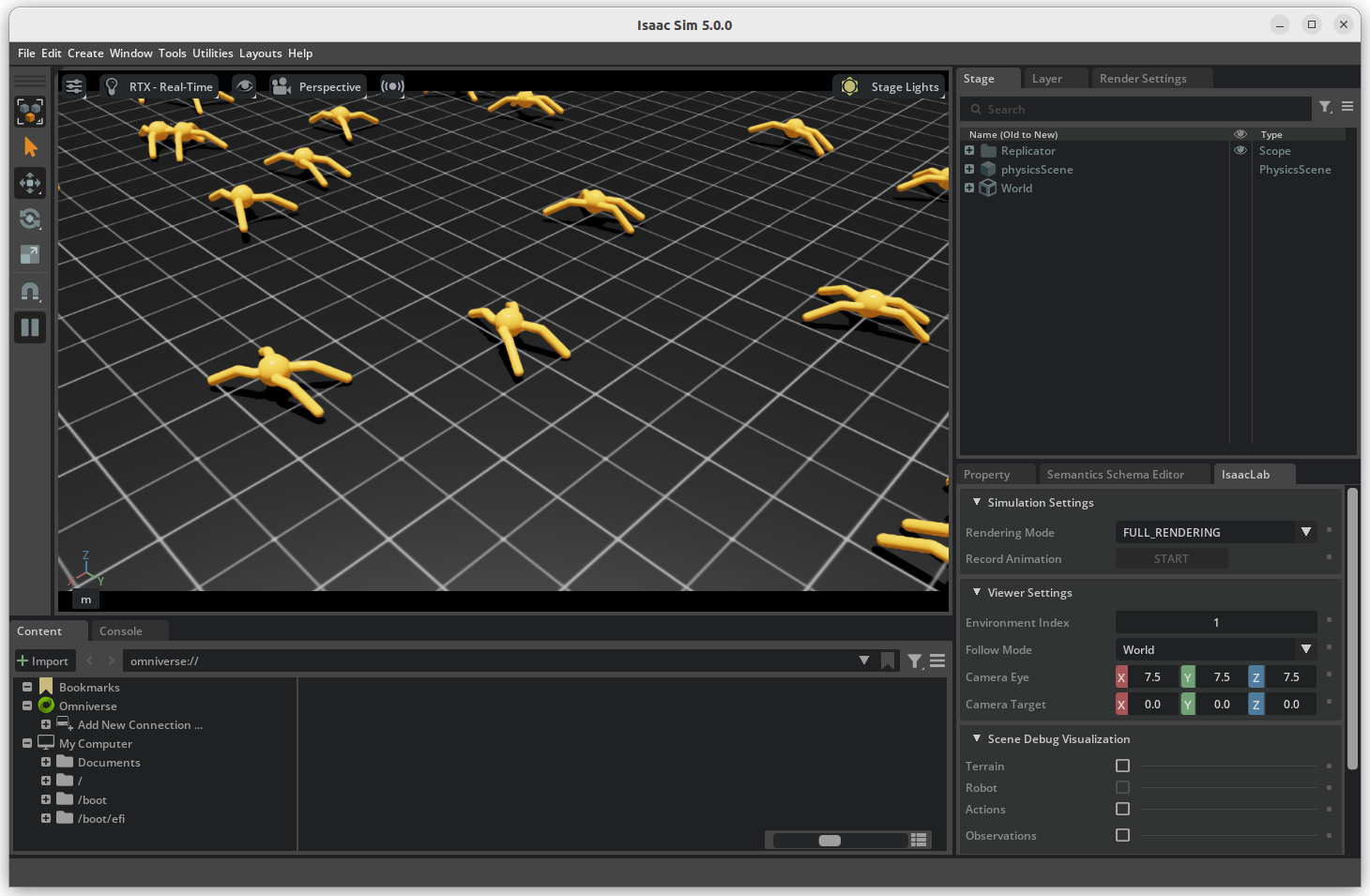
2、示例2,训练四足机器人
执行命令:
bash
./isaaclab.sh -p scripts/reinforcement_learning/rsl_rl/train.py --task=Isaac-Ant-v0打印信息:
python
(isaac_sim_5) liguopu@liguopu-System-Product-Name:~/lgp_dev/project/IsaacLab$ ./isaaclab.sh -p scripts/reinforcement_learning/rsl_rl/train.py --task=Isaac-Ant-v0
.....
################################################################################
Learning iteration 66/1000
Computation: 112420 steps/s (collection: 1.088s, learning 0.078s)
Mean action noise std: 0.36
Mean value_function loss: 0.0472
Mean surrogate loss: -0.0004
Mean entropy loss: 3.2237
Mean reward: 44.71
Mean episode length: 858.60
Episode_Reward/progress: 2.7869
Episode_Reward/alive: 0.4562
Episode_Reward/upright: 0.0896
Episode_Reward/move_to_target: 0.4527
Episode_Reward/action_l2: -0.0157
Episode_Reward/energy: -0.6214
Episode_Reward/joint_pos_limits: -0.3094
Episode_Termination/time_out: 8.4062
Episode_Termination/torso_height: 1.1562
--------------------------------------------------------------------------------
Total timesteps: 8781824
Iteration time: 1.17s
Time elapsed: 00:01:17
ETA: 00:18:02可视化界面:
如果不想看训练的可视化过程,添加参数 --headless 即可
执行对应下面的指令:
bash
./isaaclab.sh -p scripts/reinforcement_learning/rsl_rl/train.py --task=Isaac-Ant-v0 --headless3、示例3,训练机器人狗
执行命令:
bash
./isaaclab.sh -p scripts/reinforcement_learning/rsl_rl/train.py --task=Isaac-Velocity-Rough-Anymal-C-v0打印信息:
python
(isaac_sim_5) liguopu@liguopu-System-Product-Name:~/lgp_dev/project/IsaacLab$ ./isaaclab.sh -p scripts/reinforcement_learning/rsl_rl/train.py --task=Isaac-Velocity-Rough-Anymal-C-v0
.....
[2026-06-10 18:04:40,591][ogn_registration][INFO] - Destroying registration record for omni.physx.fabric
[2026-06-10 18:04:40,591][ogn_registration][INFO] - OGN register omni.physx.fabric-107.3.18 took 887746.000000
[INFO]: Base environment:
Environment device : cuda:0
Environment seed : 42
Physics step-size : 0.005
Rendering step-size : 0.02
Environment step-size : 0.02
[INFO] Generating terrains based on curriculum took : 0.787596 seconds
[INFO]: Time taken for scene creation : 11.677564 seconds
[INFO]: Scene manager: <class InteractiveScene>
Number of environments: 4096
Environment spacing : 2.5
Source prim name : /World/envs/env_0
Global prim paths : ['/World/ground']
Replicate physics : True
[INFO]: Starting the simulation. This may take a few seconds. Please wait...
################################################################################
Learning iteration 15/1500
Computation: 26857 steps/s (collection: 3.576s, learning 0.085s)
Mean action noise std: 0.83
Mean value_function loss: 0.0043
Mean surrogate loss: -0.0068
Mean entropy loss: 14.8179
Mean reward: -5.88
Mean episode length: 334.46
Episode_Reward/track_lin_vel_xy_exp: 0.0743
Episode_Reward/track_ang_vel_z_exp: 0.0539
Episode_Reward/lin_vel_z_l2: -0.0381
Episode_Reward/ang_vel_xy_l2: -0.0634
Episode_Reward/dof_torques_l2: -0.0461
Episode_Reward/dof_acc_l2: -0.1055
Episode_Reward/action_rate_l2: -0.0696
Episode_Reward/feet_air_time: -0.0087
Episode_Reward/undesired_contacts: -0.0990
Episode_Reward/flat_orientation_l2: 0.0000
Episode_Reward/dof_pos_limits: 0.0000
Curriculum/terrain_levels: 3.0766
Metrics/base_velocity/error_vel_xy: 0.5131
Metrics/base_velocity/error_vel_yaw: 0.4969
Episode_Termination/time_out: 3.1667
Episode_Termination/base_contact: 3.0000
--------------------------------------------------------------------------------
Total timesteps: 1572864
Iteration time: 3.66s
Time elapsed: 00:01:04
ETA: 01:39:17可视化界面:
如果不想看训练的可视化过程,添加参数 --headless 即可
执行对应下面的指令:
bash
./isaaclab.sh -p scripts/reinforcement_learning/rsl_rl/train.py --task=Isaac-Velocity-Rough-Anymal-C-v0 --headless8、进阶实践
1、不同的机器人手臂
生成不同的手臂,并应用随机关节位置
bash
./isaaclab.sh -p scripts/demos/arms.py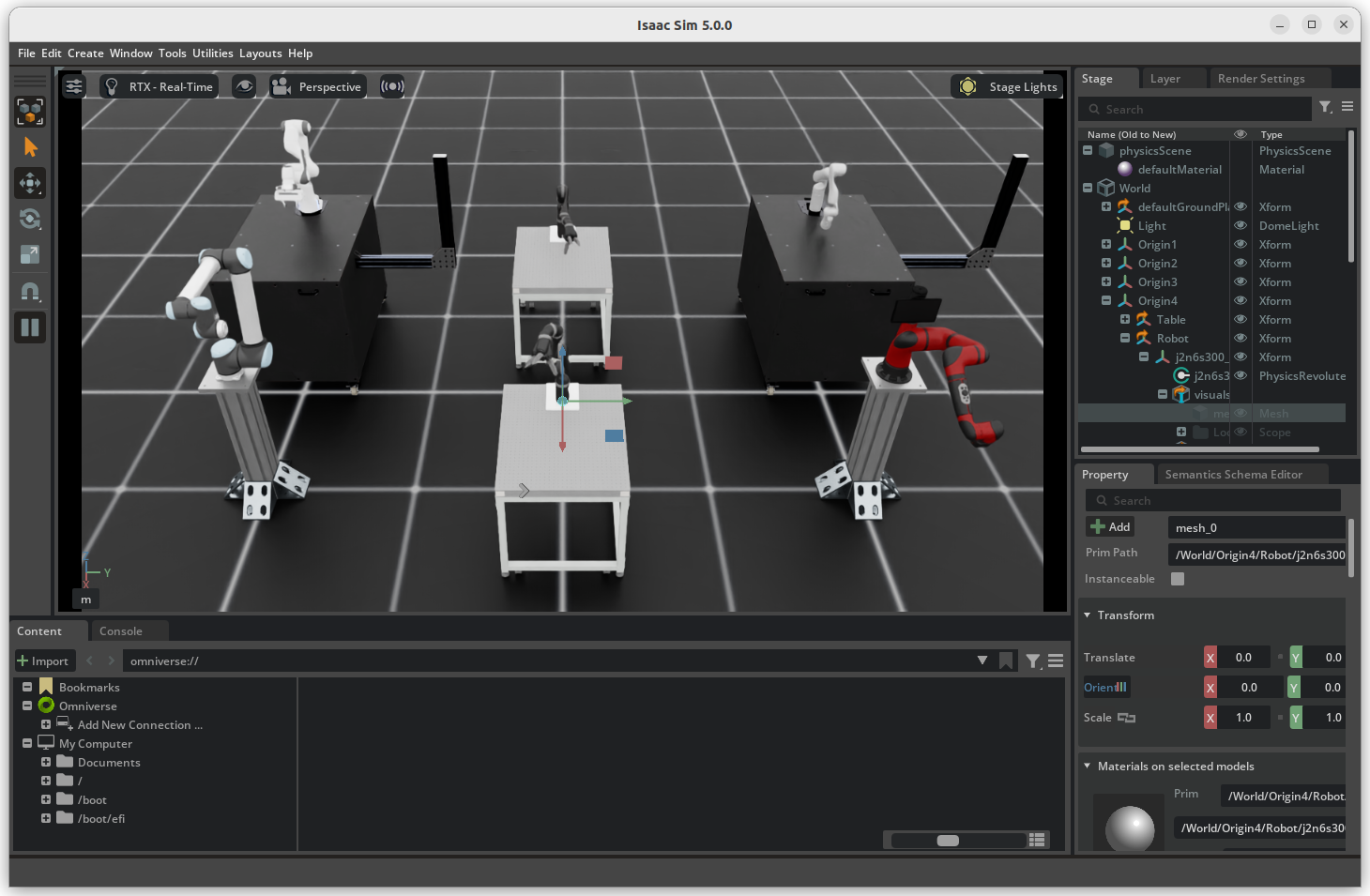
2、双足机器人
bash
./isaaclab.sh -p scripts/demos/bipeds.py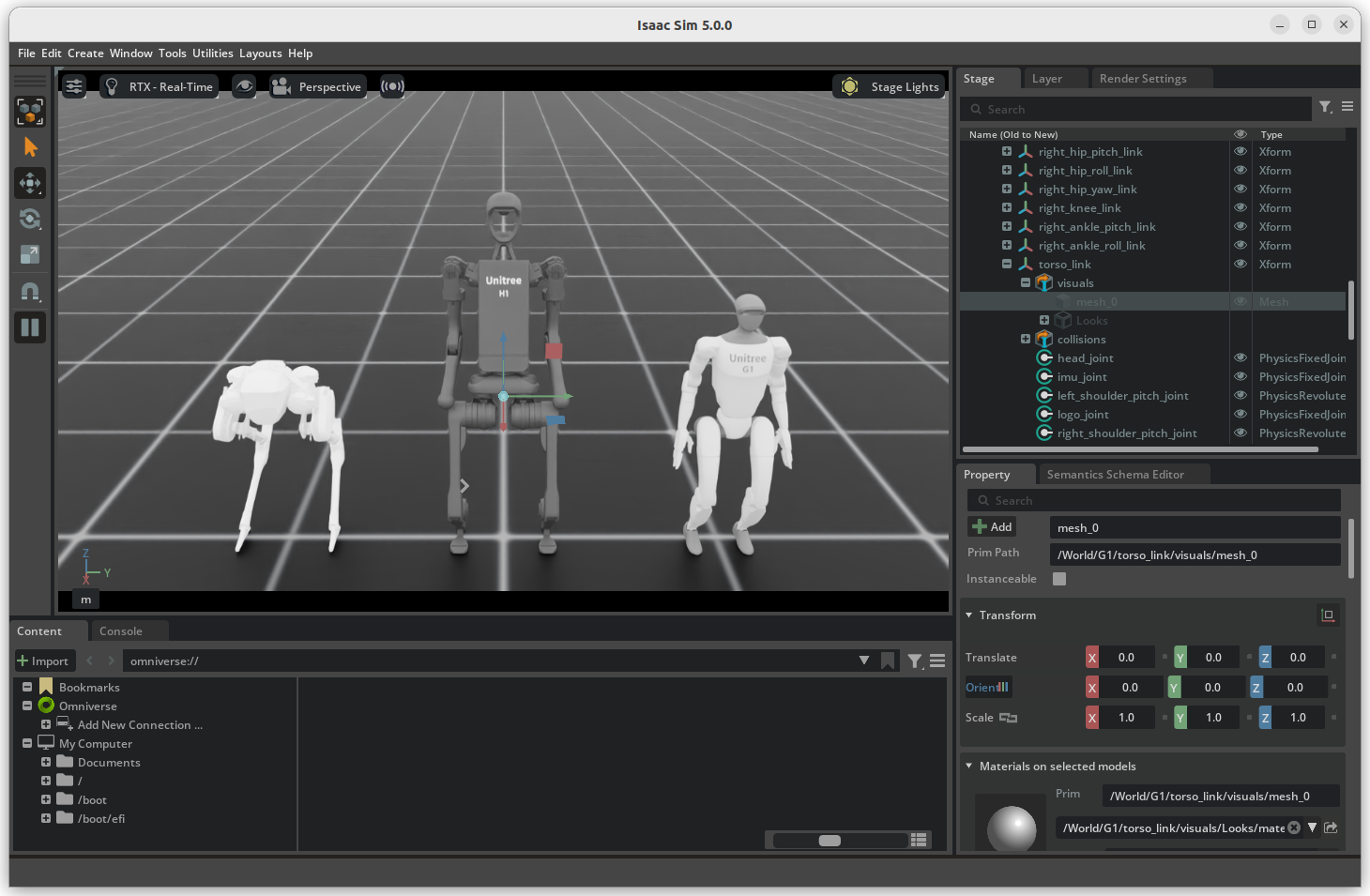
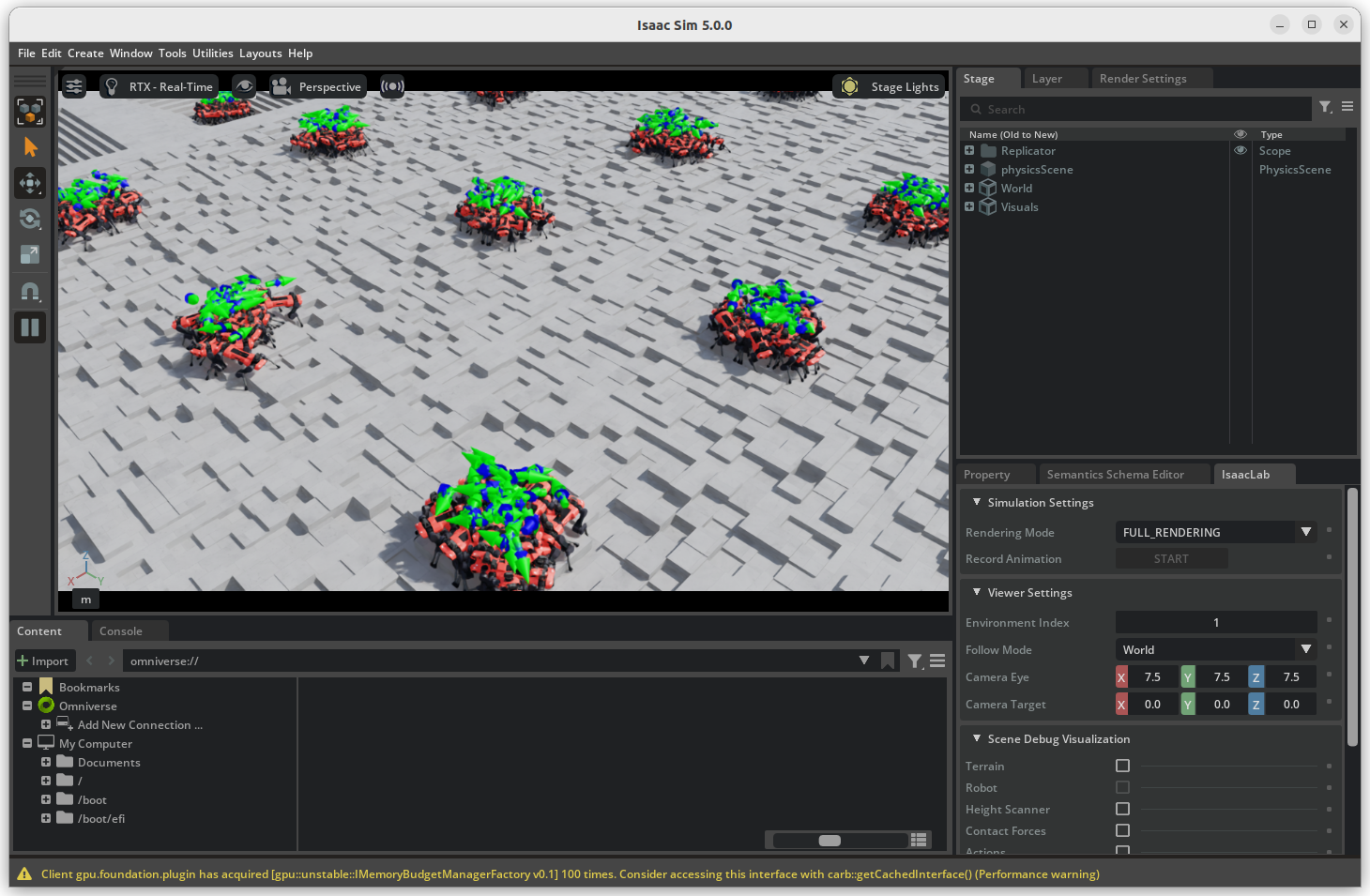
3、H1机器人步态训练
交互式推理已训练的H1机器人,在崎岖地形运动策略
bash
./isaaclab.sh -p scripts/demos/h1_locomotion.py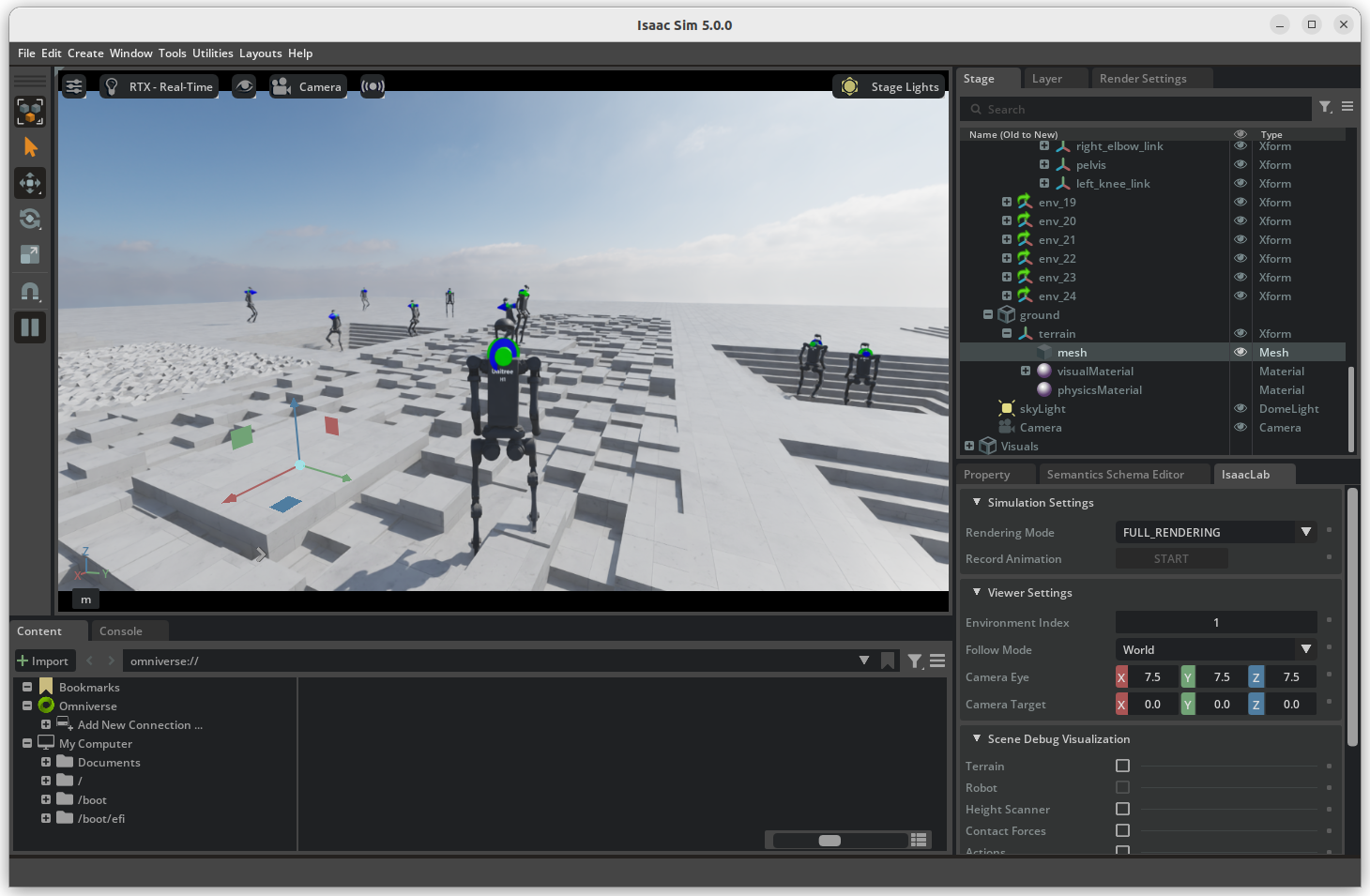
这是一个可以使用鼠标和键盘运行的交互式演示。要进入第三人称视角,请点击场景中的人形角色。
进入第三人称视角后,即可使用键盘控制该人形角色:
python
| 箭头 | 动作 |
| -- | -- |
| ↑ | 前进 |
| ← | 左转 |
| → | 右转 |
| ↓ | 停止 |
C在第三人称和第一人称视角之间切换
ESC退出当前第三人称视角参考连接:https://isaac-sim.github.io/IsaacLab/main/source/overview/showroom.html
分享完成~