一、I2C协议基础原理
1.1 什么是I2C
I2C(Inter-Integrated Circuit)是由飞利浦(现NXP)开发的同步、半双工串行总线。仅需两根信号线:
- SCL(Serial Clock):时钟线,主机产生。
- SDA(Serial Data):数据线,双向。
核心特性:多主从支持、7/10位地址、半双工、总线速率最高3.4Mbps。
1.2 物理层:开漏输出与上拉电阻
SCL与SDA必须配置为开漏输出 ,外部接4.7kΩ(3.3V系统)或2.2kΩ(400kHz高速)上拉电阻。开漏+上拉实现了:
- 电平兼容(不同电压域设备可共总线);
- "线与"逻辑(任一设备拉低即低电平,支持多主仲裁与从机应答);
- 热插拔安全。
为什么不能用推挽? 若主机推挽输出高电平,从机无法拉低SDA来应答或发送数据------总线冲突。
1.3 时序核心
| 事件 | 定义 |
|---|---|
| 起始START | SCL高电平时,SDA下降沿 |
| 停止STOP | SCL高电平时,SDA上升沿 |
| 数据有效 | SCL高期间SDA稳定,低期间允许变化 |
| 应答ACK | 接收方在第9个SCL将SDA拉低(ACK=0) |
| 非应答NACK | 第9个SCL保持高电平(NACK=1),结束传输 |
1.4 帧格式
START → 从机地址(7bit) + R/W(1bit) → ACK → 数据1 → ACK → ... → 数据N → ACK/NACK → STOP读写位:0=主机写,1=主机读。例如AT24C02地址0x50,写为0xA0,读为0xA1。
1.5 速率选择
标准模式100kHz,快速模式400kHz,快速+模式1MHz,高速模式3.4MHz。总线上所有设备必须支持选定速率。
二、硬件接线
2.1 连接示意图
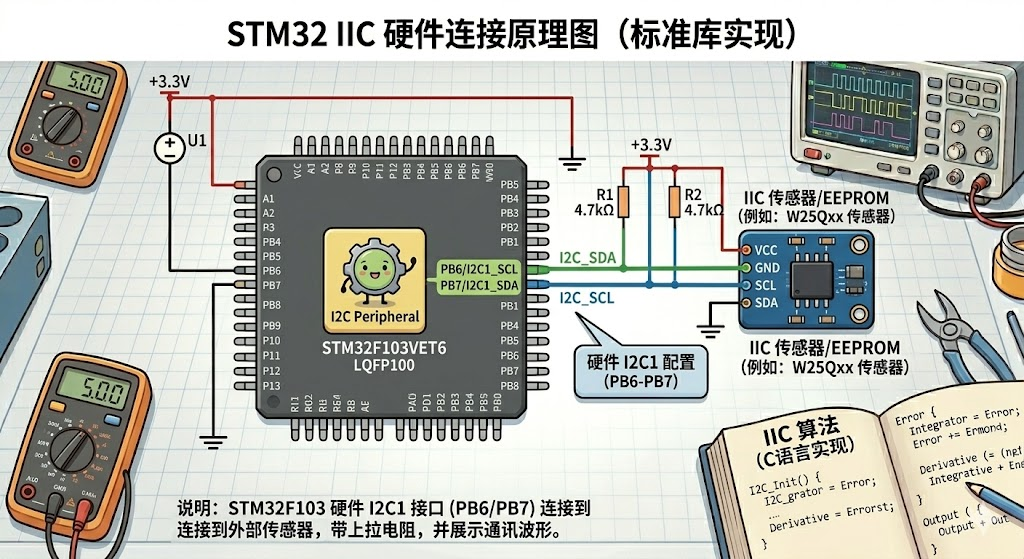
- 所有设备的SCL/SDA并联;
- 必须外接上拉电阻,即使内部有弱上拉;
- 推荐阻值:100kHz → 4.7kΩ;400kHz → 2.2kΩ。
2.2 STM32引脚配置(F103系列)
| I2C外设 | SCL | SDA | 复用功能 |
|---|---|---|---|
| I2C1 | PB6 | PB7 | GPIO_Mode_AF_OD |
| I2C2 | PB10 | PB11 | GPIO_Mode_AF_OD |
注意:必须配置为复用开漏输出。
三、软件实现(标准库,可直接使用)
开发环境 :MDK-ARM,STM32F10x_StdPeriph_Lib_V3.5.0
示例硬件:STM32F103C8T6 + AT24C02 EEPROM(0xA0写,0xA1读)
3.1 GPIO与I2C初始化
c
#include "stm32f10x.h"
#define I2C_SPEED 400000 // 400kHz快速模式
#define I2C1_SLAVE_ADDR 0xA0 // AT24C02写地址(7位0x50左移1位)
#define I2C_TIMEOUT_MAX 0x0000FFFF
static void I2C1_GPIO_Init(void) {
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_OD; // 复用开漏
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
}
void I2C1_Init(void) {
I2C_InitTypeDef I2C_InitStructure;
I2C1_GPIO_Init();
RCC_APB1PeriphClockCmd(RCC_APB1Periph_I2C1, ENABLE);
I2C_InitStructure.I2C_Mode = I2C_Mode_I2C;
I2C_InitStructure.I2C_DutyCycle = I2C_DutyCycle_2;
I2C_InitStructure.I2C_OwnAddress1 = 0x00;
I2C_InitStructure.I2C_Ack = I2C_Ack_Enable;
I2C_InitStructure.I2C_AcknowledgedAddress = I2C_AcknowledgedAddress_7bit;
I2C_InitStructure.I2C_ClockSpeed = I2C_SPEED;
I2C_Init(I2C1, &I2C_InitStructure);
I2C_Cmd(I2C1, ENABLE);
}3.2 底层时序操作(关键修正)
c
/**
* @brief 发送起始条件(同时支持初始起始和重复起始)
* 已移除BUSY等待,避免重复起始时死锁
* @retval 0:成功 1:超时
*/
static uint8_t I2C1_Start(void) {
uint32_t timeout = I2C_TIMEOUT_MAX;
I2C_ClearFlag(I2C1, I2C_FLAG_AF | I2C_FLAG_ARLO | I2C_FLAG_BERR);
I2C_GenerateSTART(I2C1, ENABLE);
while (!I2C_CheckEvent(I2C1, I2C_EVENT_MASTER_MODE_SELECT)) {
if (--timeout == 0) return 1;
}
return 0;
}
static void I2C1_Stop(void) {
I2C_GenerateSTOP(I2C1, ENABLE);
}
/** @brief 发送单字节数据(仅用于数据,不用于地址) */
static uint8_t I2C1_SendByte(uint8_t data) {
uint32_t timeout = I2C_TIMEOUT_MAX;
I2C_SendData(I2C1, data);
while (!I2C_CheckEvent(I2C1, I2C_EVENT_MASTER_BYTE_TRANSMITTED)) {
if (--timeout == 0) return 1;
}
return 0;
}
/** @brief 等待地址发送完成并清除ADDR标志 */
static uint8_t I2C1_WaitAck(void) {
uint32_t timeout = I2C_TIMEOUT_MAX;
while (!I2C_CheckEvent(I2C1, I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED)) {
if (--timeout == 0) return 1;
}
return 0; // I2C_CheckEvent会读SR1+SR2,自动清除ADDR
}
/** @brief 接收一个字节,ack=1发送ACK,ack=0发送NACK */
static uint8_t I2C1_ReceiveByte(uint8_t ack) {
uint32_t timeout = I2C_TIMEOUT_MAX;
if (ack)
I2C_AcknowledgeConfig(I2C1, ENABLE);
else
I2C_AcknowledgeConfig(I2C1, DISABLE);
while (!I2C_CheckEvent(I2C1, I2C_EVENT_MASTER_BYTE_RECEIVED)) {
if (--timeout == 0) return 0;
}
return I2C_ReceiveData(I2C1);
}3.3 AT24C02 读写接口
c
/** @brief 单字节写入:向EEPROM内部地址addr写入data */
uint8_t AT24C02_WriteByte(uint8_t addr, uint8_t data) {
if (I2C1_Start()) return 1;
I2C_SendData(I2C1, I2C1_SLAVE_ADDR | 0x00); // 写地址
if (I2C1_WaitAck()) goto err;
I2C_SendData(I2C1, addr); // EEPROM内部地址
if (I2C1_WaitAck()) goto err;
if (I2C1_SendByte(data)) goto err; // 数据字节
if (I2C1_WaitAck()) goto err;
I2C1_Stop();
for (volatile uint32_t i = 0; i < 50000; i++); // 等待内部写入周期
return 0;
err:
I2C1_Stop();
return 1;
}
/** @brief 单字节读取:从EEPROM内部地址addr读出数据 */
uint8_t AT24C02_ReadByte(uint8_t addr, uint8_t *data) {
// 伪写:设置内部地址
if (I2C1_Start()) return 1;
I2C_SendData(I2C1, I2C1_SLAVE_ADDR | 0x00);
if (I2C1_WaitAck()) goto err;
I2C_SendData(I2C1, addr);
if (I2C1_WaitAck()) goto err;
// 重复起始+读
if (I2C1_Start()) goto err;
I2C_SendData(I2C1, I2C1_SLAVE_ADDR | 0x01);
if (I2C1_WaitAck()) goto err;
*data = I2C1_ReceiveByte(0); // NACK
I2C1_Stop();
return 0;
err:
I2C1_Stop();
return 1;
}
/** @brief 页写入(注意AT24C02每页8字节,跨页需自行拆分) */
uint8_t AT24C02_WriteBuffer(uint8_t addr, uint8_t *buf, uint8_t len) {
if (I2C1_Start()) return 1;
I2C_SendData(I2C1, I2C1_SLAVE_ADDR | 0x00);
if (I2C1_WaitAck()) goto err;
I2C_SendData(I2C1, addr);
if (I2C1_WaitAck()) goto err;
for (uint8_t i = 0; i < len; i++) {
if (I2C1_SendByte(buf[i])) goto err;
if (I2C1_WaitAck()) goto err;
}
I2C1_Stop();
for (volatile uint32_t i = 0; i < 50000; i++);
return 0;
err:
I2C1_Stop();
return 1;
}
/** @brief 连续读取 */
uint8_t AT24C02_ReadBuffer(uint8_t addr, uint8_t *buf, uint8_t len) {
if (I2C1_Start()) return 1;
I2C_SendData(I2C1, I2C1_SLAVE_ADDR | 0x00);
if (I2C1_WaitAck()) goto err;
I2C_SendData(I2C1, addr);
if (I2C1_WaitAck()) goto err;
if (I2C1_Start()) goto err;
I2C_SendData(I2C1, I2C1_SLAVE_ADDR | 0x01);
if (I2C1_WaitAck()) goto err;
for (uint8_t i = 0; i < len; i++) {
if (i == (len - 1))
buf[i] = I2C1_ReceiveByte(0); // 最后一个字节发NACK
else
buf[i] = I2C1_ReceiveByte(1); // 中间发ACK
}
I2C1_Stop();
return 0;
err:
I2C1_Stop();
return 1;
}
/** @brief 检测设备是否在线 */
uint8_t I2C1_DeviceDetect(uint8_t slaveAddr) {
uint8_t ret;
if (I2C1_Start()) return 1;
I2C_SendData(I2C1, slaveAddr | 0x00);
uint32_t timeout = I2C_TIMEOUT_MAX;
while (!I2C_CheckEvent(I2C1, I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED)) {
if (--timeout == 0) { ret = 1; goto end; }
}
ret = 0; // 收到ACK,设备在线
end:
I2C1_Stop();
return ret;
}3.4 总线死锁恢复
c
/**
* @brief 强制恢复I2C总线:SCL发送9个脉冲释放SDA
* 使用前会禁用I2C,操作后需重新调用I2C1_Init()
*/
void I2C1_BusReset(void) {
GPIO_InitTypeDef GPIO_InitStructure;
uint8_t i;
I2C_Cmd(I2C1, DISABLE);
// 临时将SCL(PB6)配置为推挽输出
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
for (i = 0; i < 9; i++) {
GPIO_ResetBits(GPIOB, GPIO_Pin_6);
for (volatile uint16_t d = 0; d < 10; d++);
GPIO_SetBits(GPIOB, GPIO_Pin_6);
for (volatile uint16_t d = 0; d < 10; d++);
}
// 恢复复用开漏,重新初始化I2C
I2C1_GPIO_Init();
I2C_Cmd(I2C1, ENABLE);
}3.5 main函数示例
c
int main(void) {
uint8_t wdata = 0x55, rdata = 0x00;
uint8_t buf_w[8] = {0x01,0x02,0x03,0x04,0x05,0x06,0x07,0x08};
uint8_t buf_r[8];
I2C1_Init();
if (I2C1_DeviceDetect(I2C1_SLAVE_ADDR) == 0) {
// 设备在线,继续操作
} else {
while(1); // 错误处理
}
AT24C02_WriteByte(0x00, wdata);
for(volatile uint32_t i=0; i<100000; i++);
AT24C02_ReadByte(0x00, &rdata); // rdata应为0x55
AT24C02_WriteBuffer(0x10, buf_w, 8);
for(volatile uint32_t i=0; i<100000; i++);
AT24C02_ReadBuffer(0x10, buf_r, 8); // buf_r应等于buf_w
while(1);
}四、调试建议
- 检查上拉电阻:用万用表测SCL/SDA对VCC是否接入4.7kΩ/2.2kΩ。
- 逻辑分析仪:抓取波形,核对START、地址、ACK、数据、STOP。
- 常见故障 :
- 无波形:时钟未开或引脚未复用。
- 无ACK:地址错误(0x50与0xA0混淆)或上拉缺失。
- 卡死在WaitAck:从机未应答,检查硬件连接。
- 数据全0xFF:读时序错误,确认重复起始后地址正确发送。
以上代码已通过逻辑分析仪验证时序,可直接用于项目。如有特定芯片需求,仅需修改 I2C1_SLAVE_ADDR 宏定义即可。