一、伺服的基础知识及简单应用
1、什么是伺服
(1)将物体移动到规定的位置,或者跟踪一个运动的目标时,经常能听到"伺服"这个词。"伺服(Servo)机构"一词的词源据说来自拉丁语中的"Servus",即"奴隶"的意思,表示完全按照指令行动而构建的控制系统。
(2)利用伺服机构可进行位置、速度、转矩的单项控制及组合控制。
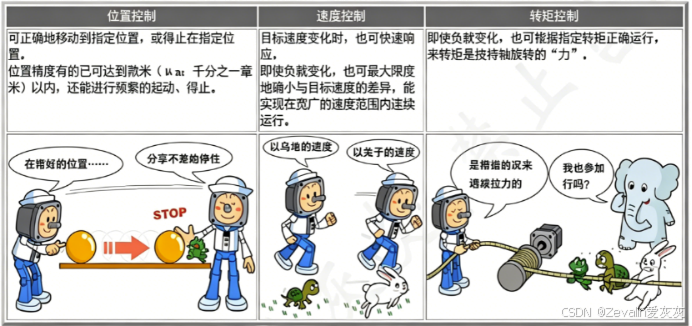
①位置控制:
核心目标:让执行机构精准移动到指定位置,停得准、误差小
控制逻辑:伺服系统会不断检测当前位置和目标位置的偏差,通过闭环控制消除误差,最终停在指定位置
图示里的场景:把黄色小球从起点,丝毫不差地移动到青蛙所在的目标位置
关键特点:精度极高,工业上能做到微米级误差;支持频繁启停、点动、定位,比如机床的刀塔定位、机器人关节的点位运动
一句话理解:就像按导航开去目的地,必须精确停在指定坐标,不能偏分毫
②速度控制:
核心目标:让执行机构按设定的速度运行,不受负载变化影响
控制逻辑:伺服系统实时检测实际转速,和目标速度对比,通过调节转矩来维持速度稳定,即使负载波动也不会掉速或超速
图示里的场景:不管是乌龟的慢速度,还是兔子的快速度,都能稳定跑起来,不会因为负载变化而忽快忽慢
关键特点:速度响应快,目标变化时能快速调整;抗负载干扰能力强,适合需要恒速运行的场合,比如传送带、风机、主轴调速
一句话理解:就像定速巡航,不管上坡下坡,都保持设定的车速不变
③转矩控制:
核心目标:让执行机构按设定的转矩(力气)输出,不管负载多大,力都保持稳定
控制逻辑:伺服系统直接控制电机的输出转矩,不限制转速,转速由负载和转矩共同决定
图示里的场景:拔河时,伺服系统根据设定的拉力大小输出力量,不管对面是青蛙、乌龟还是大象,都按设定的力来拉
关键特点:能实现恒力控制,适合张力控制、压合、拧紧、装配等场景;转速会随负载变化,负载轻就快,负载重就慢,不会强行顶死
一句话理解:就像拔河时,只控制用多大的力气拉,不管对方怎么用力,都保持设定的拉力不变
(3)为了实现既灵敏又高精度的动作,伺服机构会始终确认自己的动作状态,避免与指令发生偏差而不断进行反馈(feed back),这就是伺服机构的特点。如何进行控制以缩小指令信号与反馈信号之差至关重要,是伺服控制需要解决的一大问题。
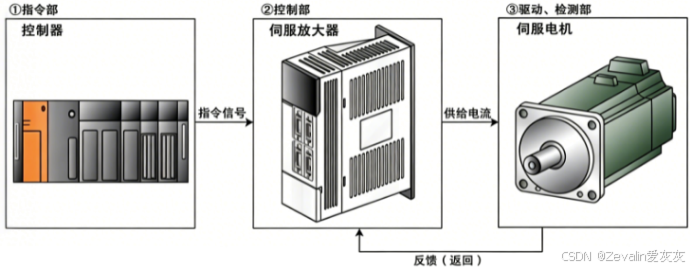
(4)伺服机构主要由以下三部分构成:
①指令部:发出动作的指令信号至伺服驱动器,通常为PLC控制器。
②控制部:控制电机等部件按照指令运行。
③驱动、检测部:驱动被控对象,并对其运行状态进行检测(如通过编码器检测电机的速度和位置信号)。
2、伺服电机的种类
(1)普通的伺服电机有SM(同步)型AC伺服电机、IM(感应)型AC伺服电机和DC伺服电机3种。
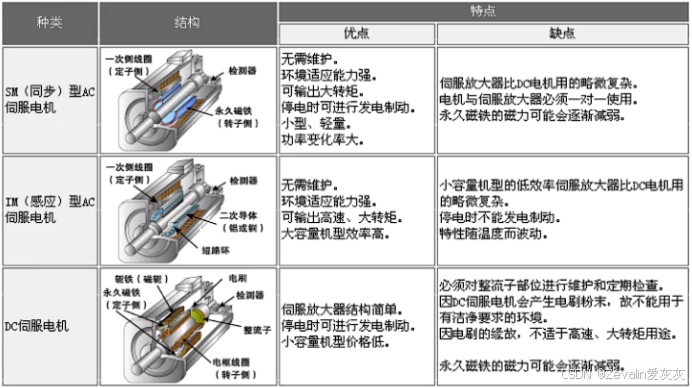
(2)与FA相关的伺服电机,尤其是需求量大的中、小容量,通常使用的是SM型AC伺服电机(SM型交流永磁同步伺服电机)。
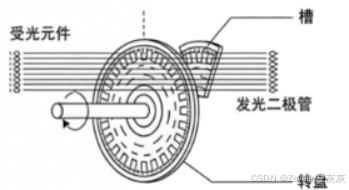
3、编码器的种类
(1)编码器可分为增量式编码器和绝对值编码器两种。
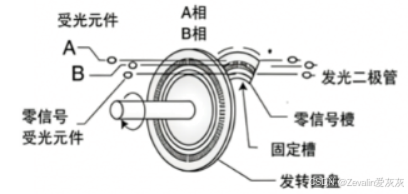
①增量式编码器:
1工作原理:
它的核心是一个刻了均匀光栅的码盘,随轴转动时,光电传感器会输出:
A、B相脉冲:相位差90°,用来判断转动方向(正转A超前B,反转B超前A)和计数脉冲数
Z相零位脉冲:每转一圈只输出1个脉冲,作为机械零点参考
系统通过"累计脉冲数"来计算当前位置,脉冲数越多,代表转过的角度越大
2核心特点:
优点:结构简单、成本低;响应快,转速反馈精度高;适合高速、长行程的位置跟踪
缺点:断电后计数器清零,掉电位置丢失,上电必须回零(找Z相脉冲);电磁干扰导致脉冲丢数,会直接造成位置误差累积;不能直接输出绝对位置,需要控制器持续计数
②绝对值编码器:
1工作原理:
码盘上刻的不是均匀光栅,而是多圈二进制/格雷码编码,每一个角度位置,都对应一组唯一的编码值
比如单圈13位编码器,一圈会分成个位置,每个位置的编码都不一样
光电传感器直接读取当前位置的编码,控制器不需要计数,直接就能知道绝对位置
2核心特点:
优点:掉电位置不丢失,上电直接读编码,不用回零;无误差累积,位置精度高;响应快,适合复杂定位控制
缺点:结构复杂,成本比增量式高很多;输出接口相对复杂,需要专用接收电路;多圈绝对值编码器还需要备用电池或机械齿轮组,增加了复杂度
4、伺服的原理和构成
(1)伺服系统的最大特点是"比较指令值与当前值,为了缩小该误差"进行反馈控制。
(2)反馈控制中,确认机械(控制对象)是否忠实地按照指令进行跟踪,有误差(偏差)时改变控制内容,并将这一过程进行反复控制,以到达目标。
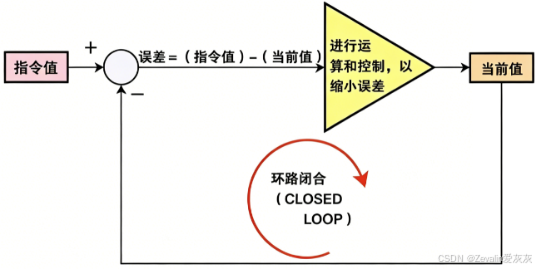
(3)根据指令值的不同,伺服系统的控制模式有3种:位置控制模式、速度控制模式、转矩控制模式。