三、机械传动基础知识
1、旋转传动
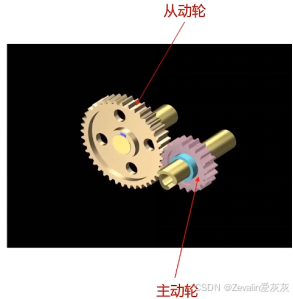
(1)正齿轮:
正齿轮一般由若干组齿轮组成,齿轮转动有一个动力传递的过程,一般称动力由主动轮传递至从动轮(主从是相对的,主要看是谁带动谁转)
(2)蜗轮蜗杆减速器:
蜗轮蜗杆减速器由涡轮和蜗杆组成齿轮,蜗杆是主动件,涡轮是从动件
蜗轮蜗杆减速器用于传动空间交错轴之间的运动和动力,一般输入轴和输出轴之间成90°角

蜗轮蜗杆减速器可以实现很大的单级减速比,能够反向自锁,同样适合功率传递,但其轴向力大、易发热,也因此机械效率低
(3)行星减速器:
行星减速器由内齿圈、太阳轮、行星轮和行星架组成,太阳轮是主动轮,由电机驱动,内齿圈固定在减速器壳体上
行星轮C固定在行星架D,绕着内齿圈A旋转,动力从太阳轮B输入,再通过行星架D将动力传递到输出轴上
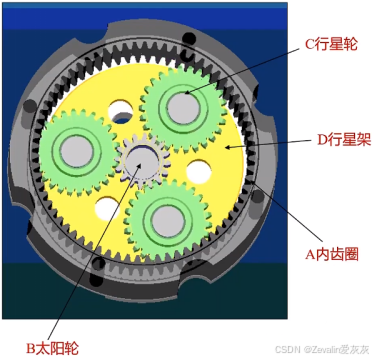

一般情况下,具有单级减速齿轮组的行星减速机速比通常在3~10之间,速比超过10以上的行星减速机,需要使用两级(或以上)的行星齿轮组减速
行星减速器体积小、质量小、结构紧凑、承载能力大、传动效率高(通常可达97%以上)、传动比大、运动平稳、抗冲击和震动能力强,适合精密传动,但由于其材料优质、结构复杂,制造和安装比较困难些,成本高
(4)RV减速器:
RV减速器用于转矩大的机器人的腿部、腰部和肘部三个关节,负载大的工业机器人,一二三轴都是用RV
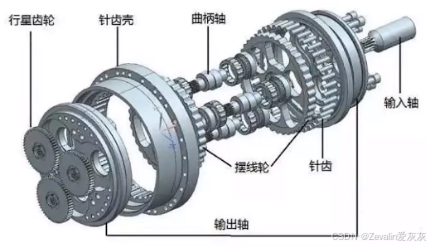
RV减速器具有更高的疲劳强度、刚度和寿命,不过其重量重,外形尺寸较大
(5)谐波减速器:
谐波减速器用于负载小的工业机器人或大型机器人末端几个轴,谐波减速器是谐波传动装置的一种,谐波传动装置包括谐波加速器和谐波减速器
谐波减速器主要由刚轮、柔轮、波发生器、轴承组成
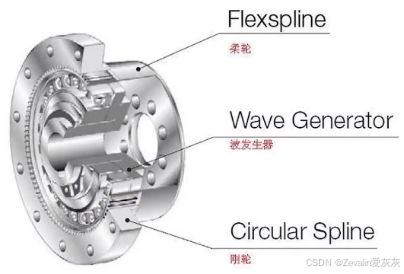
谐波减速器体积小、重量轻、承载能力大、运动精度高,单级传动比大,不过随着使用时间增长,其运动精度会显著降低
2、直线传动
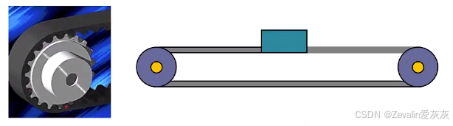
(1)同步带传动:
同步带传动系统主要由同步带和同步带轮组成
同步带传动的直线速度高,精度处于中等水平,推力不大,成本低,安装简单,加工、装配精度要求不高,不过它属于柔性系统,高速长距离运行较难控制
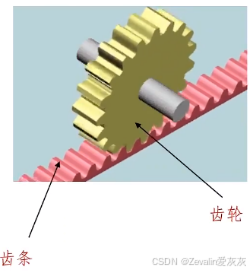
(2)齿轮齿条传动:
齿轮齿条传动系统主要由齿轮和齿条组成
齿轮齿条传动的直线速度高,推力处于中等水平,成本低,安装简单,加工、装配精度要求不高,不过它存在磨损问题
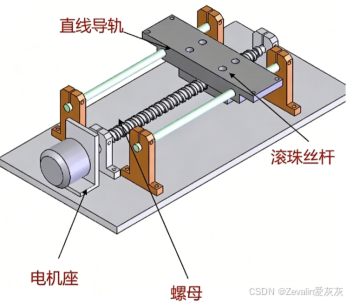
(3)丝杠传动:
丝杠传动系统由直线导轨、滚珠丝杠、螺母、电机座组成
滚珠丝杠作为主动体,螺母随丝杆的转动角度按照对应规格的导程转化成直线运动,物体可以通过螺母座和丝杆螺母连接,从而实现对应的直线运动
丝杠传动的推力大、精度高,但直线速度较低,行程有限制,成本高,安装复杂,加工、装配精度要求高
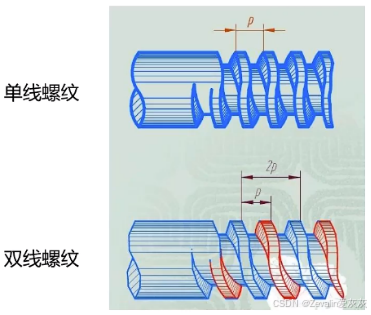
丝杠传动中的参数:
①导程:丝杆或螺母旋转一周,螺母在丝杆上面移动的距离
②螺距:相邻两条螺纹之间的距离
四、伺服的选型计算
1、相关物理概念及公式
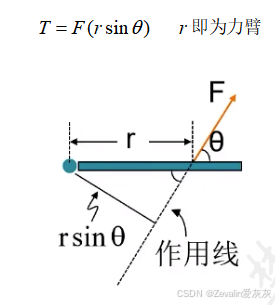
(1)转矩:
转矩(力矩)是改变物体转动状态的物理量,当物体受到合外力矩不为零时,静止的物体将产生角加速度开始转动,已转动的物体转速或转动方向将发生改变
考虑开门的情况,如下图,欲让门产生运动,必须施加一个外力F,外力可分解为平行于门面和垂直于门面的两个分力,平行分力的作用线通过转轴,力臂为零,因此不产生转矩,只有垂直于门面的分力会产生使门转动的转矩,施力点离转轴越近,越容易让门转动,综合以上因素,定义转矩,以符号T表示
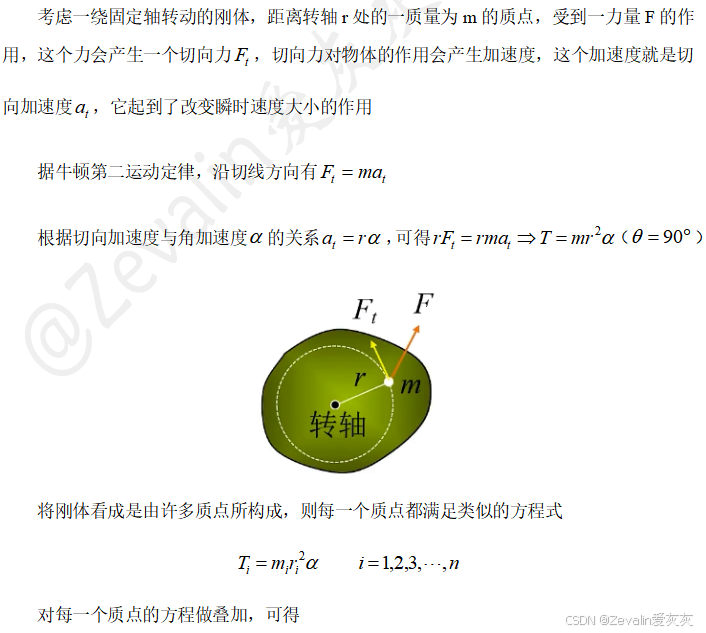
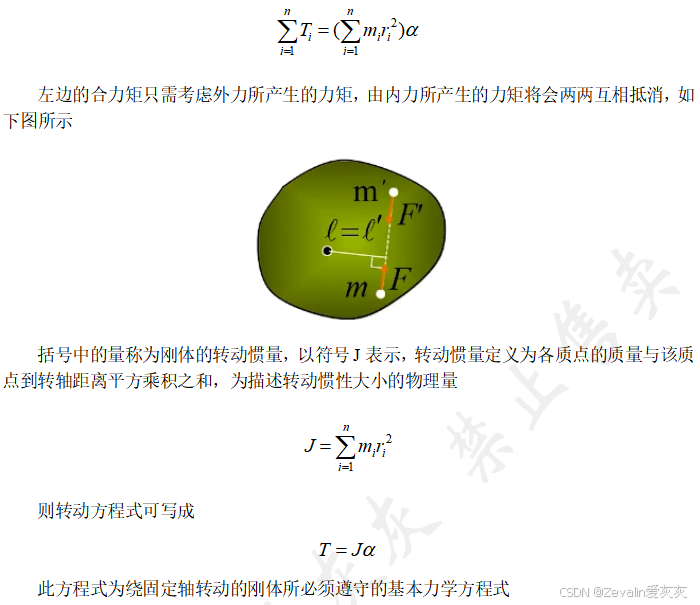
(2)转动方程:
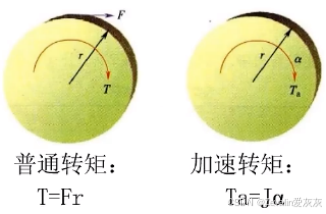
(3)两类转矩:
①普通转矩:主要是克服摩擦力、重力等外力需要的转矩。
②加速转矩:克服物体惯量需要的转矩。(不难理解,如果一个物体本身越重,在力臂相同的情况下,需要施加一个更大的力才能使其转动得更快,这和直线运动中的牛顿第二定律是类似的)
(4)线速度与角速度:
①线速度反映单位时间内物体直线位移的变化。
②角速度反映单位时间内物体角度的变化。
2、选型计算概述
(1)伺服的选型原则:
①电机最大转速>系统所需之最高移动转速。
②电机的转子惯量与负载惯量相匹配。
③连续负载工作转矩<电机额定转矩。
④电机最大输出转矩>系统所需最大转矩(加速时转矩)。
(2)选型计算的内容:
(3)常见传动机构转动惯量的计算:
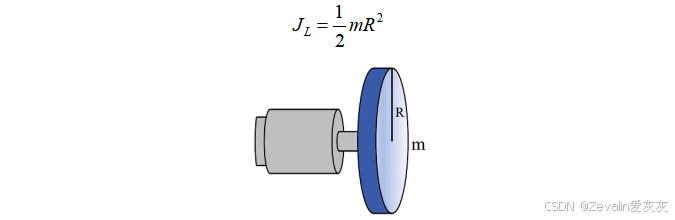
①直接驱动:

②同步带传动:
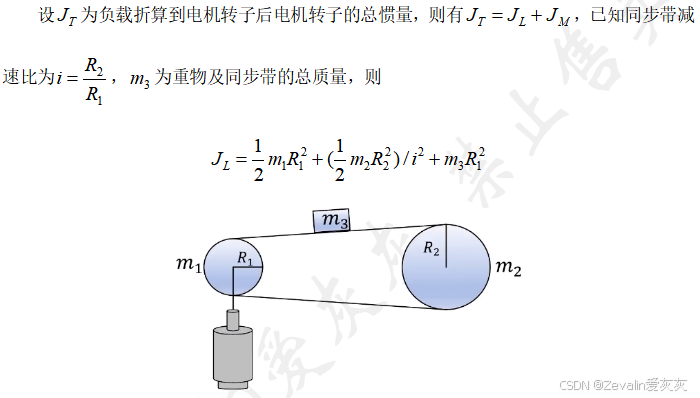
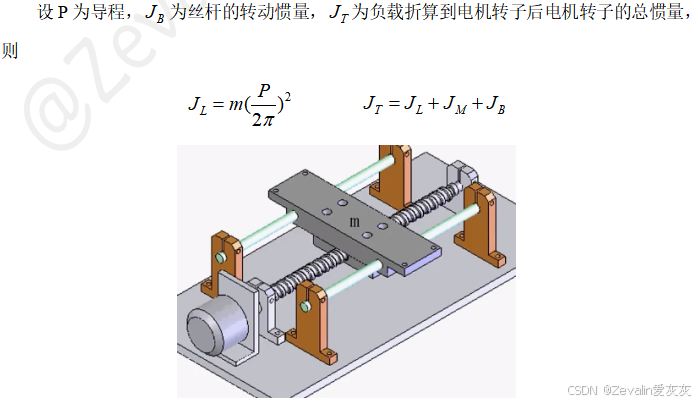
③丝杆传动:
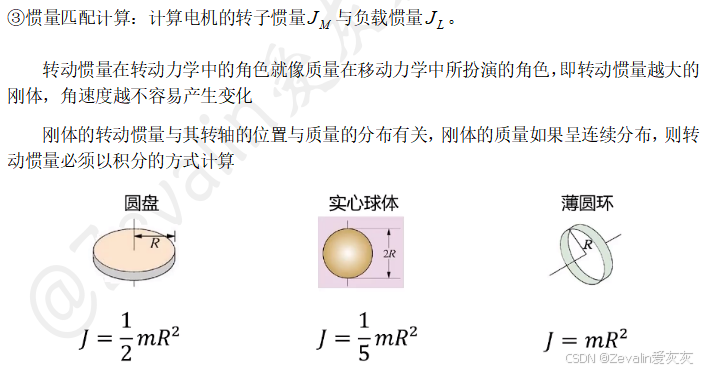
(4)惯量匹配:
3、选型计算示例
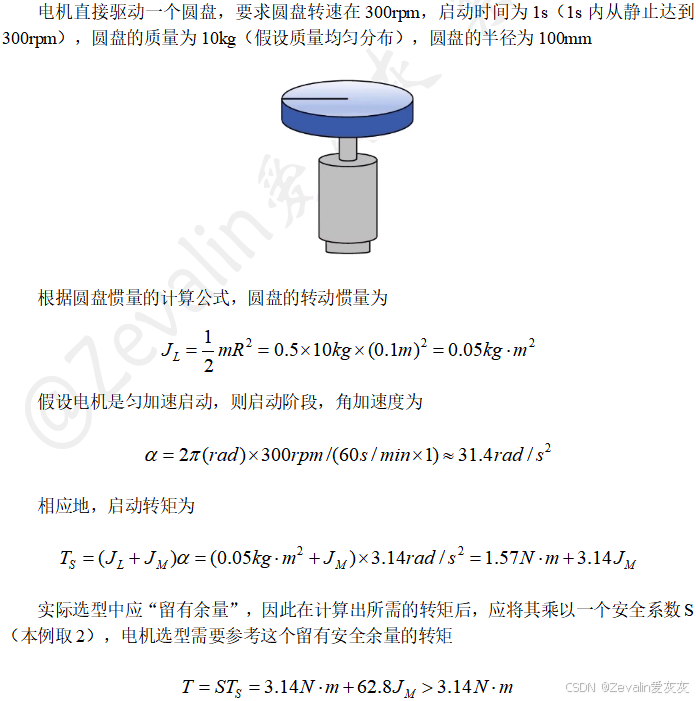
(1)例1:直接驱动(忽略空气阻力)。
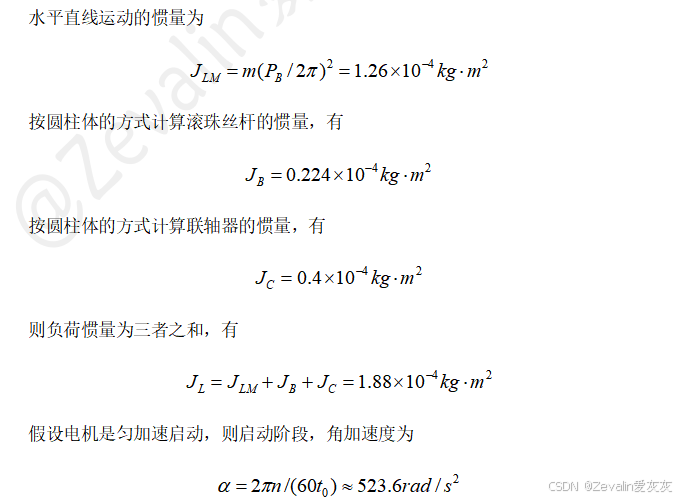
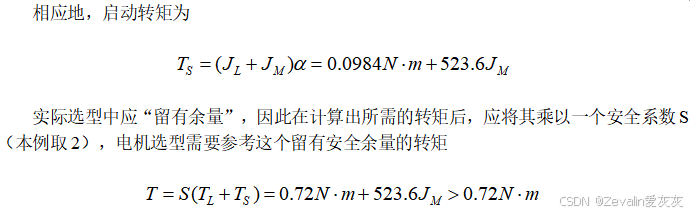
(2)例2:滚珠丝杆传动(忽略空气阻力)。