三、EtherCAT基础
1、实时以太网概述
(1)将计算机网络中的以太网技术应用于工业自动化领域,就构成了工业以太网,它是当前工业控制现场总线技术的一个重要发展方向。
(2)与传统功技术的现场总线相比,以太网现场总线具有以下优点:
①传输速度快,数据包容量大,传输距离长。
②使用通用以太网元器件,性价比高。
(3)下图所示的是实时工业以太网通讯模型的几种实现:
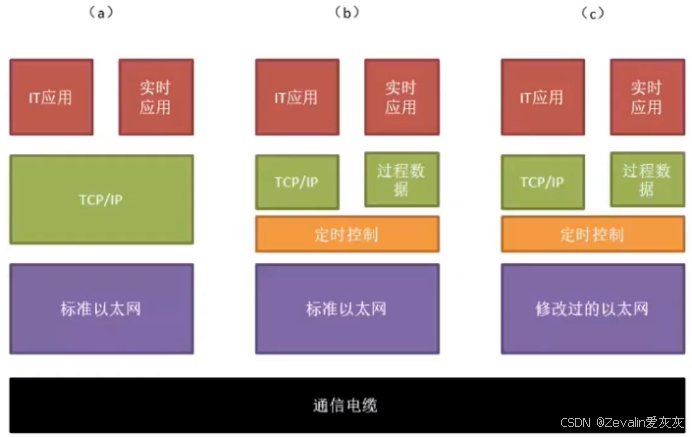
①基于TCP/IP的实现:采取TCP/IP协议栈上层合理控制通讯中的非确定性因素,比如合理调度、定义优先级等。使用这种实现方式的有ModbusTCP、EthernetIP等,不过实时性并不高。
②基于以太网的实现:引入过程数据传输协议,使用特定的以太网类型的数据帧进行传输。使用这种实现方式的有Ethernet Powerlink、EPA、Profinet RT等,实时性较高。
③修改以太网的实现:从站由专门的硬件实现,实时通道有实时MAC接管通讯控制,避免报文冲突。使用这种实现方式的有EtherCAT、SERCOS-III、PROFINET IRT等,实时性高。
(4)认识EtherCAT(Ethernet control Automation technology):
①EtherCAT是一种超高速以太网现场总线,使用标准的以太网物理层,改变原来的CSMA/CD(载波侦听多路访问/冲突检测)链路层。
②传输速率是100Mbit/s(100base-TX),传输媒介超5类屏蔽网线或光纤。
③主站实现只需一张普通网卡,从站需要专用的从站控制芯片。
④由德国beckhoff公司开发,由ETG(EtherCAT Technology Group)协会推广,2003年被引入市场,并于2007年成为国际标准。
(5)传统以太网应用于现场总线存在的主要性能问题:
①带宽利用率的问题:最小的以太网帧,长度大于等于84字节,其中包含帧前导和帧间间隙,如果需要传输的过程数据不多,那么一帧以太网帧的应用数据占比将会非常低。
②堆栈延时:以太网采用了7层OSI模型,每一层都有封装或解析的处理,这就导致整个以太网的堆栈很大,处理这些堆栈非常消耗算力,也就导致数据处理被延迟。(而EtherCAT只保留了物理层、数据链路层和应用层,堆栈比较精简)
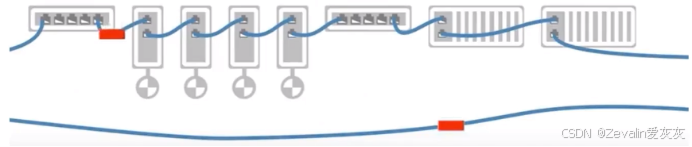
③交换机延时:几乎所有交换机使用"存储并转发"策略,报文转发的过程也会存在延时且无法控制(就像高峰期网络非常卡,非高峰期网络顺畅一样),这会带来很多不确定性。
如下图所示,如果是线型拓扑,就意味着交换机的级联,在交换机空闲状态下,即使没有缓冲引起的延迟,仍有大量积累的延迟和抖动
2、EtherCAT运行原理
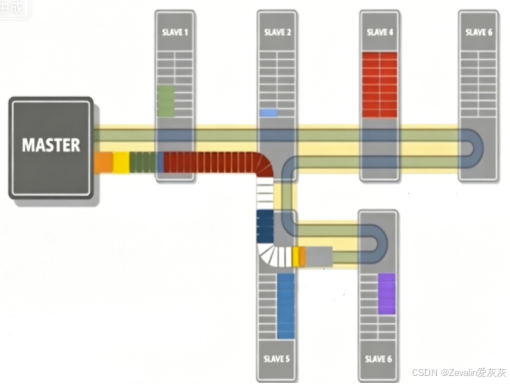
(1)以太网帧从主站被发出(只有主站能够发送以太网帧),在总线上途经若干个从节点,从节点可以在途经的以太网帧中取出或插入数据,然后以太网帧往下一从节点传递,直到回到主站。
(2)EtherCAT的传输速率可达2×100Mbit/s(高速以太网,全双工模式)。
(3)DC(Distributed Clock)分布时钟:
①PC系统无法提供精确的时钟,不过EtherCAT总线中,可以由ESC芯片提供硬件时钟。
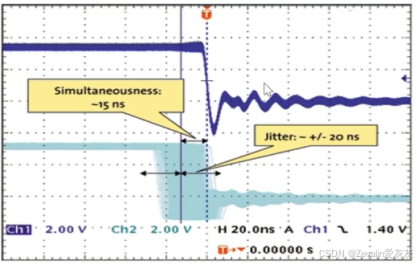
②EtherCAT具有精确的时钟校准系统,主时钟不是放在主站上,而是可以放在任意一个从站上,每一个从站都有精确的时钟,在实际应用中,需要定义其中一个从站的时钟做为主时钟,所有其它从站时钟和主时钟做校准(能够做到精确同步,误差远小于1us)。
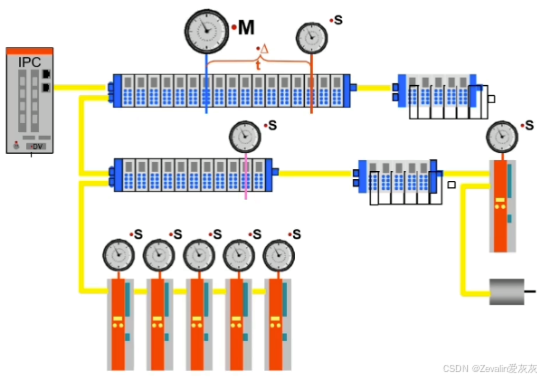
③EtherCAT采用分布时钟,数据交换就完全基于纯硬件机制。如果两个设备间距300个节点,线缆长度约120米,那么同步抖动也是远远小于1us的。
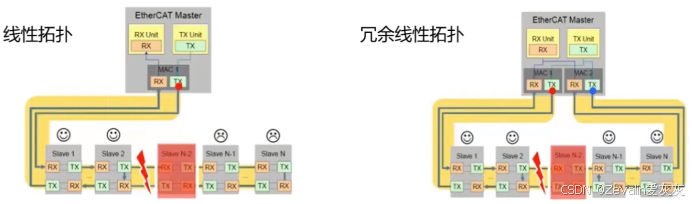
(4)EtherCAT网络拓扑结构:
EtherCAT几乎支持任何拓扑类型,包括线型、树型、星型等,无论多少节点都可以一条线串接起来,不过不同拓扑结构各有优劣,线性拓扑中,如果其中一个节点发生故障,将会影响后面的节点,而冗余线性拓扑则不会(除非两个节点发生故障)
快速以太网的物理层(100BASE-TX)允许两个设备之间的最大电缆长度为100米
由于连接的设备数量可高达65535,网络的容量几乎没有限制
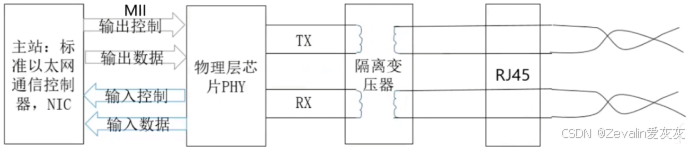
(5)EtherCAT主站的硬件组成:
①通讯控制器:完成以太网数据链路的介质访问控制(MAC)功能。
②MII:标准以太网接口,定义了与传输介质无关的标准电气和机械接口,将以太网数据链路层和物理层隔离,方便以太网选用任何传输介质。
③物理层芯片PHY:实现编码、译码和收发。
④隔离变压器:实现信号隔离,提高通讯可靠性。
⑤通讯电缆:100Base-TX规范的5类UTP线缆。
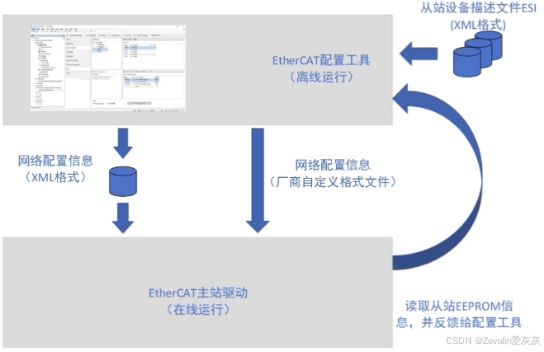
(6)EtherCAT主站的软件组成:
①只要能收发标准帧的以太网帧设备,都能实现EtherCAT主站的功能,只需要软件实现,不需要额外增设硬件设施。
②EtherCAT主站的软件实现通常由EtherCAT配置工具和主站驱动组成:
1配置工具用于解析设备描述文件,以及生成网络初始化命令和周期性通讯数据帧格式。
2主站驱动是在线运行的,可以在线操作从站设备。
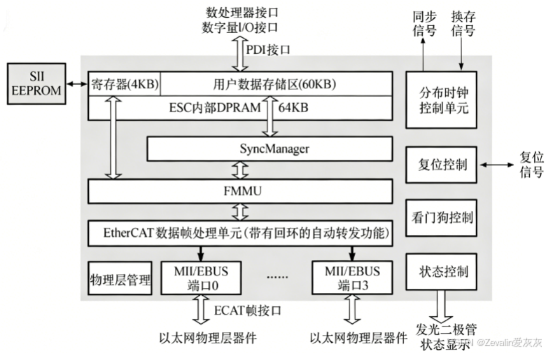
(7)EtherCAT从站的硬件组成:
①从站微处理器:实现应用层和用户自定义的程序。
②EtherCAT从站控制器(ESC):实现EtherCAT协议栈。
③物理层器件:以太网的PHY芯片和网口。
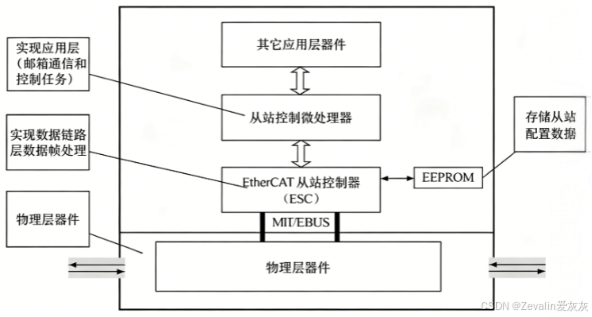
其中EtherCAT从站控制器使用ESC专用集成芯片,内部集成数据帧转发处理单元(每个ESC最多集成4个数据收发端口)
EtherCAT从站控制器最大64KB的DPRAM存储空间,由同步管理器通道管理,保证了数据的实时性
EtherCAT从站控制器具有FMMU(总线内存管理器单元),能提供逻辑地址映射功能,使得有较高的数据帧利用率
EtherCAT从站控制器集成分布时钟(DC)功能,为微处理器提供高精度的中断信号
(8)EtherCAT从站的软件组成:
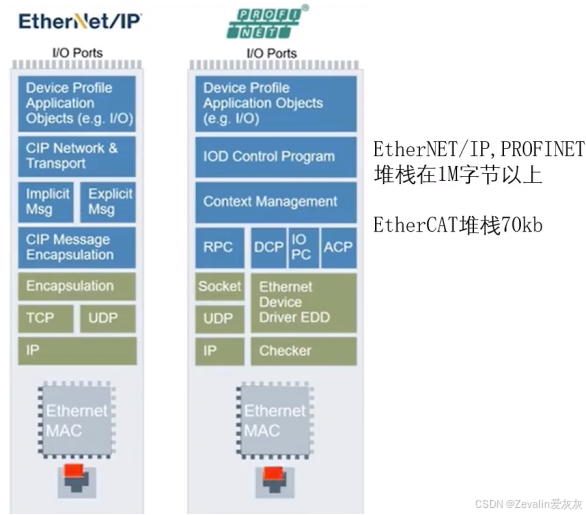
①EtherCAT从站采用精简的OSI模型,仅使用了物理层、链路层、应用层三层协议,与多数传统的现场总线相同,但相比于其它实时以太网协议,如PROFINET、EtherNet/IP等,其协议栈更加精简,这也是EtherCAT协议的实时性优越于其它实时以太网协议的重要原因之一。
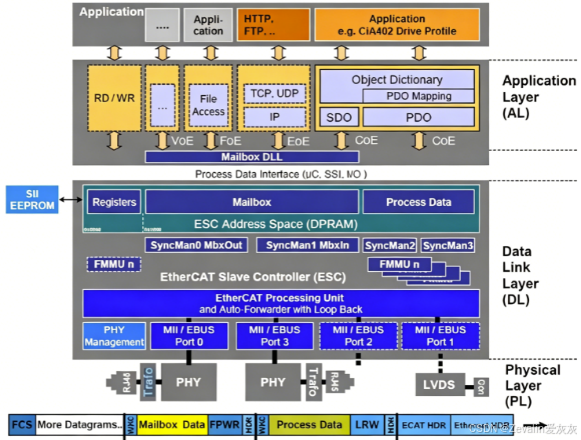
②Application Layer是最高的控制功能层,直接面向具体的控制对象;Data Link Layer是数据链路层,最基本的功能就是通过该层的协议使相邻两个节点之间进行可靠的数据传输。
3、EtherCAT协议概述
(1)EtherCAT常用的应用层协议规范:
①CANopen over EtherCAT(CoE,基于EtherCAT的CANopen应用协议):
CANopen设备和应用行规广泛用于多种设备类别和应用,如I/O组件、驱动、编码器、比例阀、液压控制器,以及用于塑料或纺织行业的应用行规等
EtherCAT可以提供与CANopen机制相同的通讯机制,包括对象字典、PDO(过程数据对象)、SDO(服务数据对象),甚至网络管理
②Servo Driver over EtherCAT(SoE,EtherCAT伺服驱动行规):
SERCO Sinterface™是全球公认的、用于高性能实时运行系统的通讯接口,尤其适用于运动控制的应用场合
③Ethernet over EtherCAT(EoE):
在EtherCAT网段内实现任何以太网数据的传输;交换机端口可用于连接以太网设备;以太网数据帧通过嵌入到EtherCAT协议中进行传输(类似于因特网协议)
④File access over EtherCAT(FoE):
类似于TFTP的简单协议;可通过网络访问设备中的文件;将统一的固件跨网络上传到设备
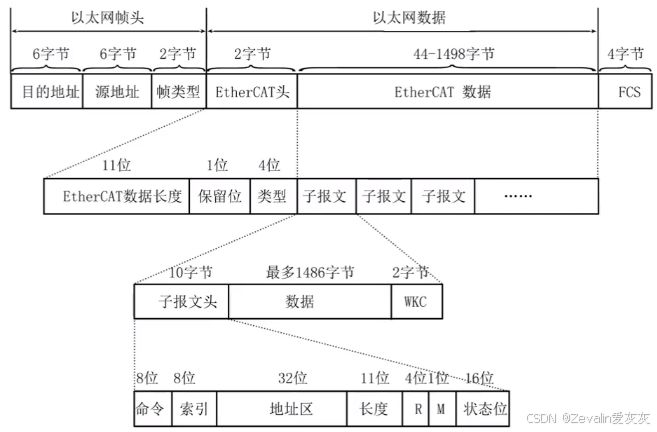
(2)EtherCAT数据帧格式:
①EtherCAT的数据帧结构采用的是标准的以太网帧结构,其中帧头是标准的以太网帧头,只是帧类型固定为0x88A4。
②数据包由EtherCAT头和EtherCAT数据组成,EtherCAT头指示了EtherCAT数据区的长度,即所有子报文长度的总和,另外EtherCAT头还指示了类型,"1"表示与从站通信,其余暂时预留(截至2026年)。
③若干个子报文组成EtherCAT数据区,子报文又由子报文头、数据域及工作计数器组成。子报文头标记该子报文应传输到那一个从站,并且要对该子报文进行读或者写操作;子报文的数据区可以是从站ESC寄存器的数据,也可以是邮箱报文或是过程数据。
④在主从站通信的过程中,16位的工作计数器(WKC)的值为从站读写操作计数,主站发起周期控制的时候,预先给定WKC一个值,当数据帧遍历完整个设备的时候,通过对比返回的WKC值,可以验证数据报文是否被各从站节点正确处理。
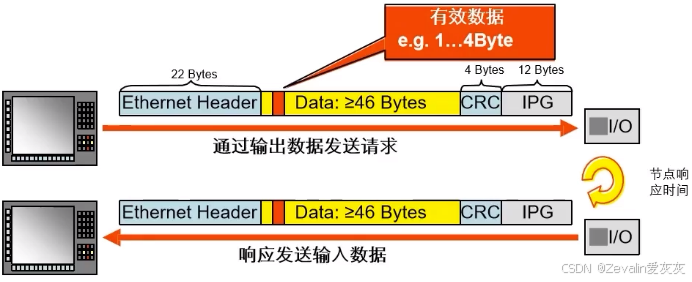
(3)EtherCAT数据帧的传输:
①系统的控制周期由主站发起。
②主站发下行报文,数据帧遍历所有从站设备,每个设备在数据帧经过时,分析寻址到的本机报文,根据报文头命令读取数据或写入数据到报文中指定位置(输入数据和输出数据)。
③从站硬件把该报文的工作计数器WKC加相应的计数,表示该数据被处理。
④访问最后一个从站时,将处理的数据帧作为上行报文直接发送给主站,主站收到后处理返回数据,记为一次通讯结束。
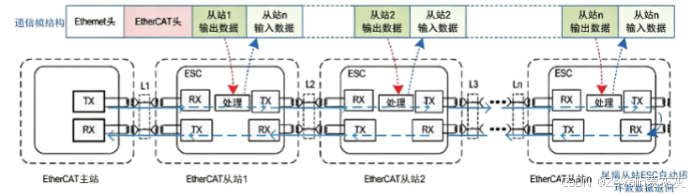
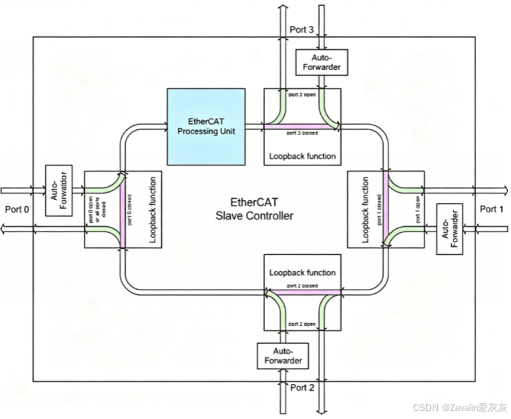
(4)EtherCAT从站的内部数据处理:
①ESC具有四个数据收发端口,每个端口都可以收发以太网数据帧,数据帧在EtherCAT Processing Unit中处理。
②自动模式下,建立连接则端口打开,失去连接则端口闭合,如果端口有与其它设备连接,则数据帧从该端口流出,否则转向下一个端口,比如报文从端口0流入,处理完毕后,另外三个端口都未与其它设备连接,那么报文(被从站处理后的)就会从端口0再流出去。
四、Profinet基础
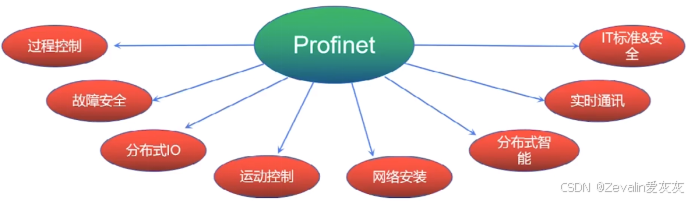
1、Profinet概述
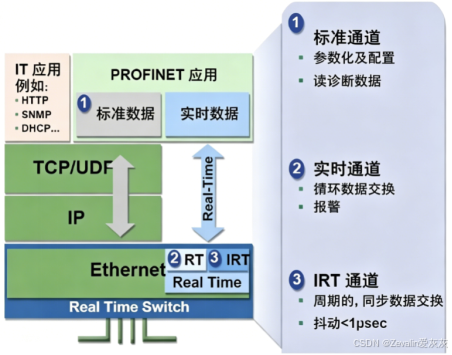
(1)Profinet是一种工业以太网(以太网是一种局域网规范,工业以太网是应用于工业控制领域的以太网技术)上运行的实时技术规范,是西门子SIMATICNet中的一个协议,具体地说,是众多协议的集合,其中包括Profinet IO RT、CBART、IO IRT等实时协议。
(2)Profinet具有和标准以太网相同的一些特性如全双工、多种拓扑结构等,其速率可达百兆或千兆,另外,它也有自己的独特之处,如能实现实时的数据交换,是一种实时以太网;与标准以太网兼容,可一同组网,能通过代理的方式无缝集成现有的现场总线等。
(3)由于Profinet协议基于工业以太网,而Profibus协议基于RS485串行总线,它们的传输介质不同协议也完全不同。
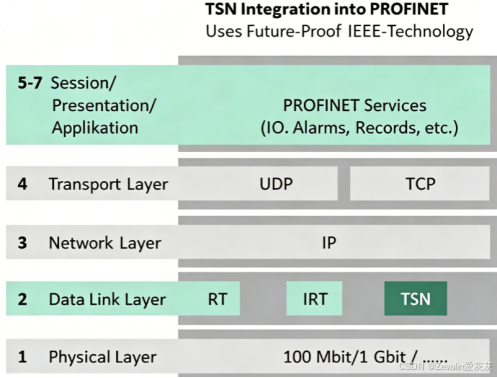
2、Profinet的网络模型
(1)Profinet使用了物理层、链路层、网络层、传输层与应用层协议,其中物理层规定了百兆或千兆的传输速率,网络层与传输层则沿用TCP/IP协议族:的标准,关键在于数据链路层与应用层的规范。
(2)链路层参考了IEEE802.3、IEEE802.1Q、IEC61784-2等标准,分别保证了全双工、优先级标签、实施扩展的能力,从而能够实现RT(实时通信)、IRT(等时实时通信)、TSN(时间敏感网络)等通信形式。
(3)应用层有多种应用层的协议标准,如IEC61784、IEC 61158确保了PROFINET IO服务,IEC 61158 Type 10确保PROFINET CBA服务等。
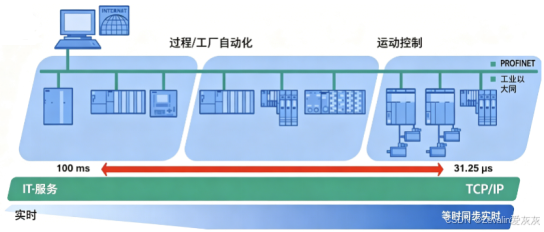
3、Profinet的时延
(1)Profinet可实现不同时延下的数据传输服务,时延范围从100ms到31.25us不等。
(2)根据应用的时间要求,可以划分出Profinet的多个应用领域,例如低时延高实时------运动控制领域、中高时延------过程/工厂自动化领域。
4、Profinet模块化通讯
Profinet主要把通讯模块分成八类,如下所示:
5、Profinet通讯架构和要求
(1)周期时间或响应时间须有上限,数据的发送必须在既定的时间内完成或开始。
(2)抖动随精度的增加,须越来越小。
(3)数据量在一个时间单位内必须传输完成,相当于传输速率要求。
(4)用特殊网络组件时,保证通信不冲突。
(5)时隙协议保证数据在合适时传输(实时性要求不同,数据的发送策略可能不同)。
(6)网络支持时钟同步机制,许多过程应用同步触发。
6、Profinet RT通讯
(1)实时RT用于时间苛刻的过程数据,用于循环用户数据或者事件驱动的报警。
(2)实时RT的特点:
①PROFINET使用优化的实时通信数据。
②通信彻底地不占用处理器的资源。
③可以使用标准的网络部件。
④响应时间范围为1-10ms。
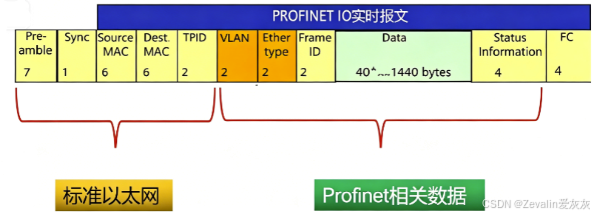
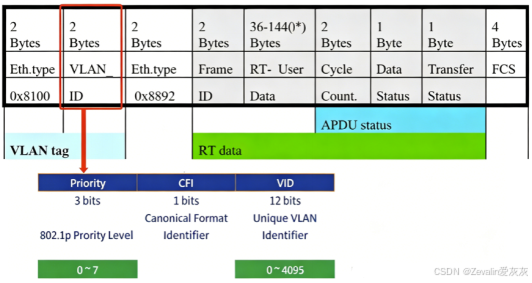
(3)RT帧结构参数:
①VLAN:优先级数据标签,有0-7共八个优先级,数值越大则优先级越高,下图所示的RT帧为6。
②Eth.type:下图所示的0x8892代表该帧为PROFINET协议的一个帧。
③Frame:规定该帧的实时等级、数据通道。
④RT-User:该帧携带的数据,长度为36-1440字节,数据长度不足则会自动补齐。
⑤APDU status:该帧数据位的一些指示状态。
⑥FCS:循环冗余校检码。
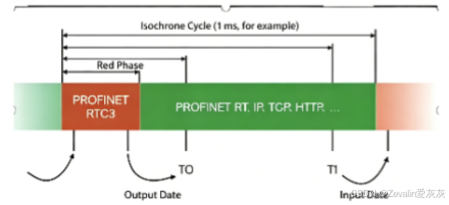
7、Profinet IRT通讯
(1)实时IRT用于特殊要求的应用,如运动控制和工厂自动化的高性能应用。
(2)实时IRT的特点:
①IRT实现循环周期小于1ms,抖动精度小于1us。
②通讯周期分为确定性通道和开放式通道。
③TCP/IP和RT数据在开放式通道进行数据交换。
④两种数据交换同时存在,不会影响同步循环控制。

与RT帧相比,IRT帧删掉了VLAN部分,直接使用Frame ID指示帧类型,减少开销
(3)Profinet将数据传输的事件流划分成等时时间片(如1ms),并在每个等时时间片中,都单独给IRT帧优先预留了一定的传输时间,IRT传输时间过去以后,再进行IRT帧、标准帧等数据的传输,以此保证了IRT帧数据传输的实时性与等时性。
(4)Profinet设备网络中存在一个主时钟,主时钟使用同步帧将一个时钟系统(IRT域内)所有设备的本地时钟的脉冲发生器同步成相同的时钟,以保证总线周期达到同步,且偏差在1us内。

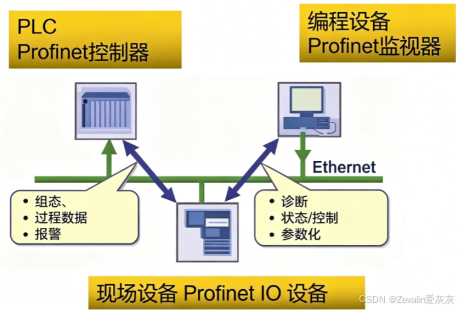
8、Profinet IO设备
(1)Profinet IO设备分类:
①Profinet从站:可以读写IO数据,比如远程IO、伺服驱动器、变频器等现场设备。
②Profinet主站:负责过程数据交互、配置、逻辑控制、报警,比如PLC、IPC等。
③Profinet监视器:用于设备参数配置、设备诊断、程序上传下载,比如PC、HMI等。
(2)Profinet IO功能一致性分类:
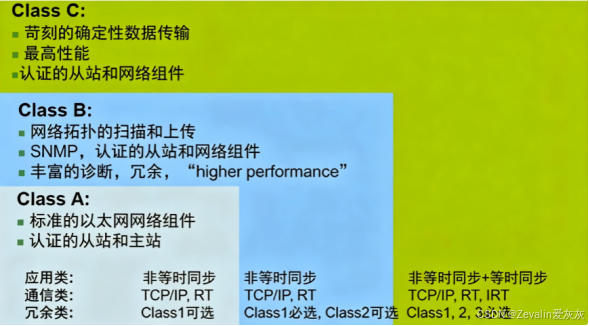
分类的目的是简化最终用户/系统集成商对满足所要求特性的部件的选择,确保在同一一致性类的设备的功能范围相对统一,这也是设备认证的基础
(3)Profinet IO设备模型:
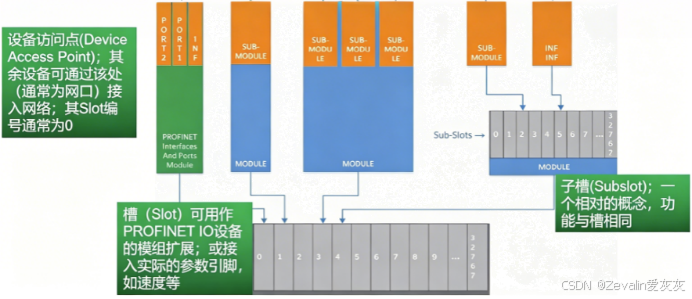
(4)Profinet IO设备GSD文件:
GSD(General StationDescription)文件是基于XML语法格式的文本文件,描述了PROFINET IO设备的一些参数以及技术特性,如所有可能的模块和子模块(组态数据)、总线接口(DAP)、模块的启动参数、设备基本信息、诊断信息
(5)Profinet IO主从通信关系:
①Profinet主从站间使用应用关系(ApplicationRelation,AR)描述它们之间的通信关系(Communication Relation,CR)。
②CR分为3种------记录数据CR、IO数据CR、警报CR,3种CR标识了主站与从站之间的数据传输类型,并分别标识了其传输的以太网通道类型。
③AR、CR的关系,是由监视器内的工程配置软件根据主从站的GSD文件,进行整个网络的组态配置后,整个系统启动时主站与从站建立起来的。
五、脉冲控制基础
1、脉冲模式原理
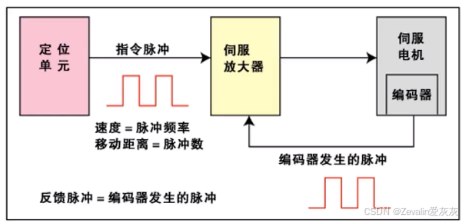
(1)脉冲控制的信息交互为,运动控制器输出脉冲信号给伺服驱动器,类似于控制步进。
(2)脉冲控制要求伺服驱动器工作于位置模式。
(3)脉冲控制模式下,伺服驱动器内部要完成三闭环(位置环,速度环及电流环)。
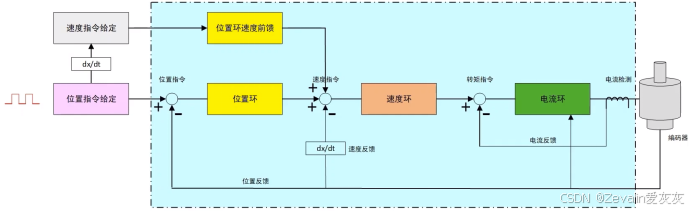
(4)控制器通过脉冲个数来控制伺服走的距离,通过脉冲频率控制伺服的速度。
(5)电子齿轮比:
PLC发送的脉冲指令,乘以电子齿轮比之后,才是伺服运作的真正脉冲指令,电子齿轮比本质上是一个脉冲缩放器,相当于一个虚拟的变速箱

电子齿轮比=电子齿轮分子÷电子齿轮分母
齿轮后脉冲幅值=齿轮前脉冲幅值×电子齿轮比
齿轮后脉冲频率=齿轮前脉冲频率×电子齿轮比
2、高速脉冲种类
(1)高速脉冲主要分为脉冲+方向、双脉冲、A/B相脉冲。
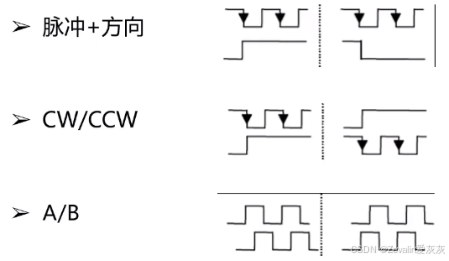
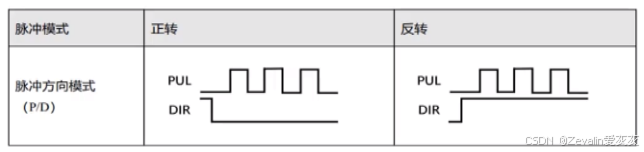
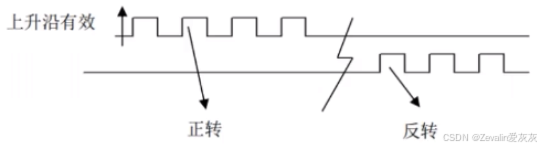
(2)脉冲+方向:
①上面是脉冲线,只负责发"步数/圈数",发一个脉冲,电机就走一步;下面是方向线,当方向信号是高电平的时候,伺服电机正转,当方向信号是低电平的时候,伺服电机反转。
②此模式一般应用于脉冲频率不超过200kpulse/s的情况,不适合长距离发送脉冲,因为它抗干扰能力差,一般在小型PLC中应用这种方式,比如西门子S7-200系列、三菱FX系列、松下FP系列等。
③在使用脉冲方向模式时,要先给方向信号,再给脉冲信号,不然电机启动时可能会先向反方向运动一小段后,才朝正确的方向运动。
(3)双脉冲:
①上面是CW(Clockwise,顺时针)线,发一个脉冲,电机正转;下面是CCW(Counter-Clockwise,逆时针)线,发一个脉冲,电机反转。
②此模式一般应用于脉冲输出频率超过200kpulse/s以及长距离发送脉冲的情况下,因为它抗干扰能力强,信号传输的准确性也更高,一般在大型模块化PLC中的位置控制模块上使用,比如三菱的QD75模块、松下的PP42模块等。
③禁止同时给CW和CCW发脉冲。
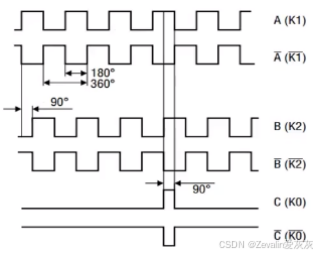
(4)A/B相脉冲:
①用 A、B 两路相位差90° 的方波信号同时传递步数和传递方向。
②通过A、B的相位关系判断转向,A 相超前B相90°为正转,B相超前A相90°为反转。