课程链接:www.bilibili.com/cheese/play...
面向人群
Web前端可视化开发者
课前准备
具备Web前端开发基础,比如html+css+js 基础、vue基础。
为什么要学习机器人Web前端可视化?
- 机器人行业前景广阔,具有巨大的发展潜力和市场空间。

- 机器人的前端可视化在机器人开发、运维和交互体验层面都是至关重要的。
为什么要选择这个课程?
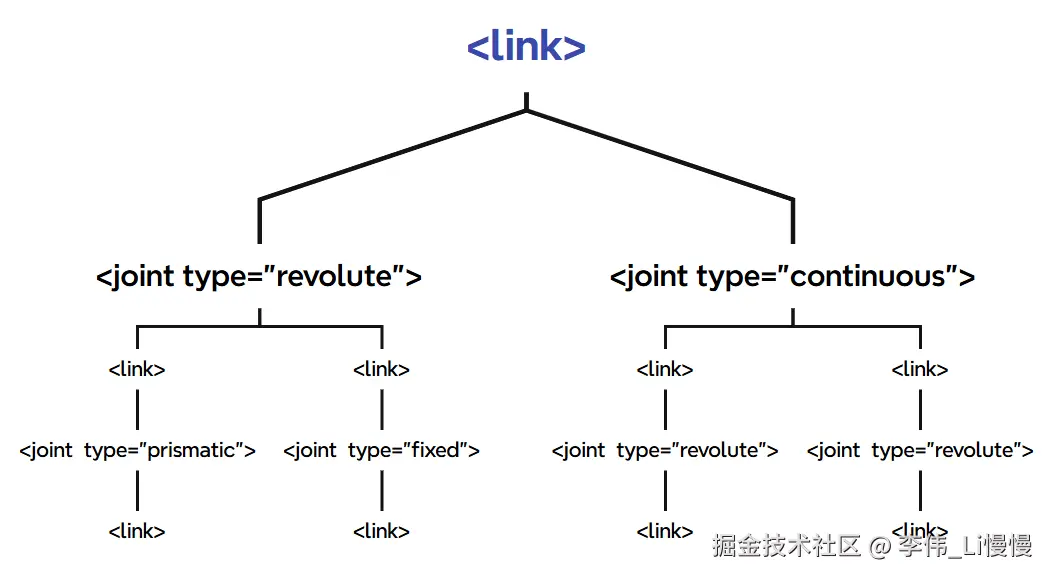
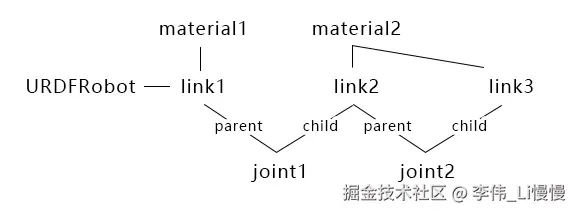
实战性强:本课程源自我在傅里叶动力和小米机器人的多年的实战经验,会详解机器人在web前端可视化时需要具备的专业知识,比如机器人的图形树的构建规则、机器人的运动规则等。

注:此图是小米宣发里的图,不涉及保密问题。
新:本课程包含近年机器人在web前端可视化方面的常见需求点,比如统一机器人描述格式的解析、机器人常用的静态资产格式的解析等。
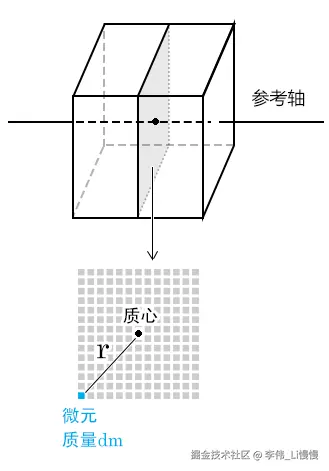
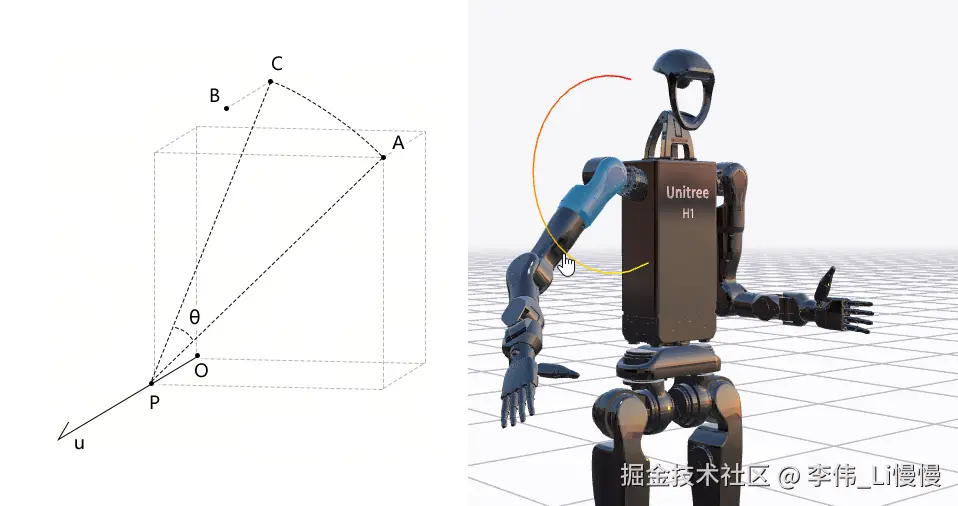
详细:本课程讲得很细,细到URDFLoader源码详解,用图形学详解关节的拖拽变换算法,用质量公式详解质心,用微积分推导惯性矩等。

内容全面:本课程涵盖机器人URDF 模型的解析、渲染、交互、实时动画,以及静态资产的解析、渲染等。
课程亮点
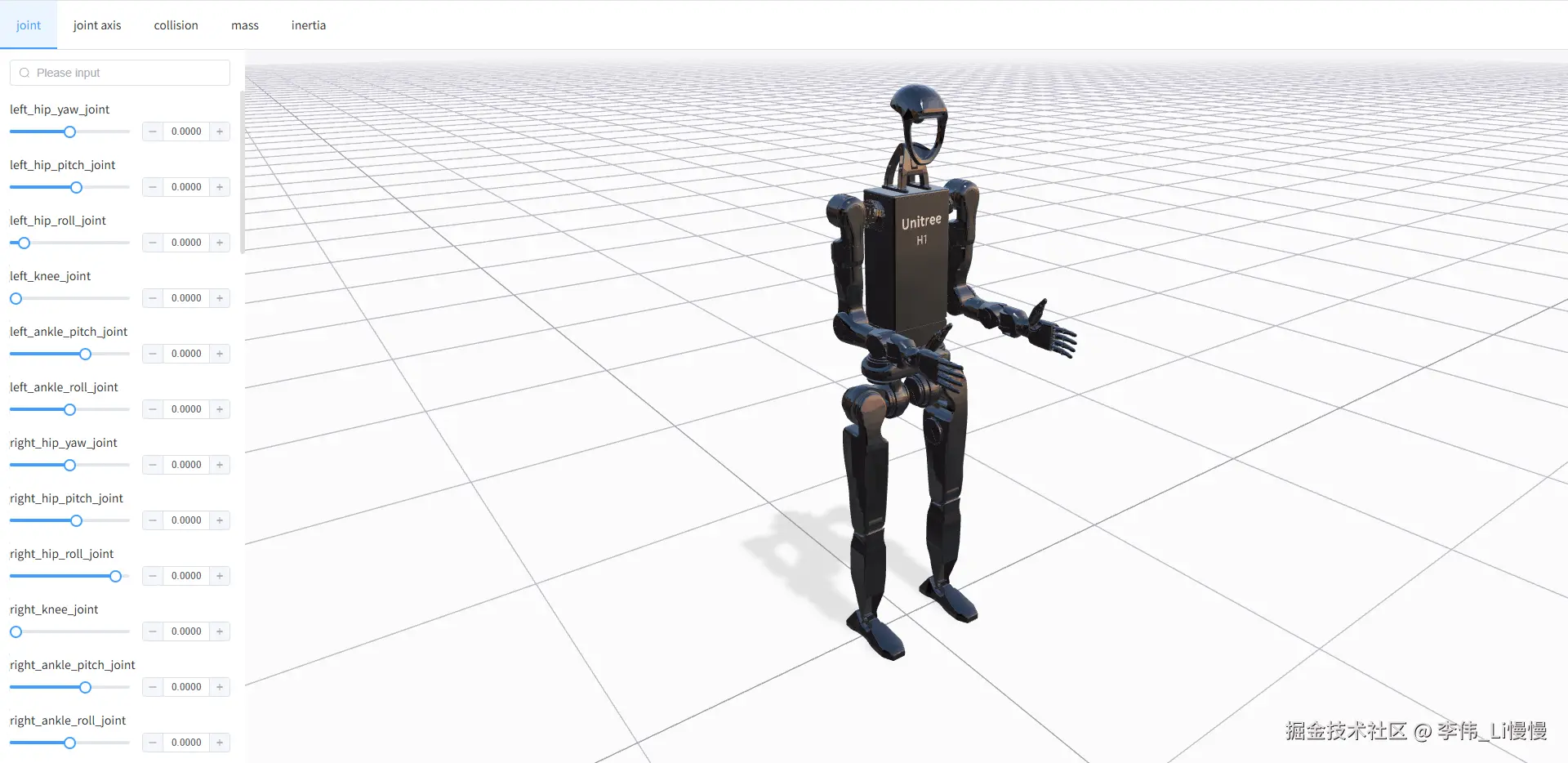
- urdf 模型的加载、解析和渲染。
- 机器人的交互控制,如机器人关节的拖拽旋转。
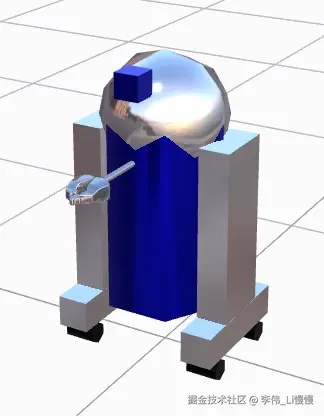
- 机器人坐标系、质心、碰撞体、惯性矩的可视化。

-
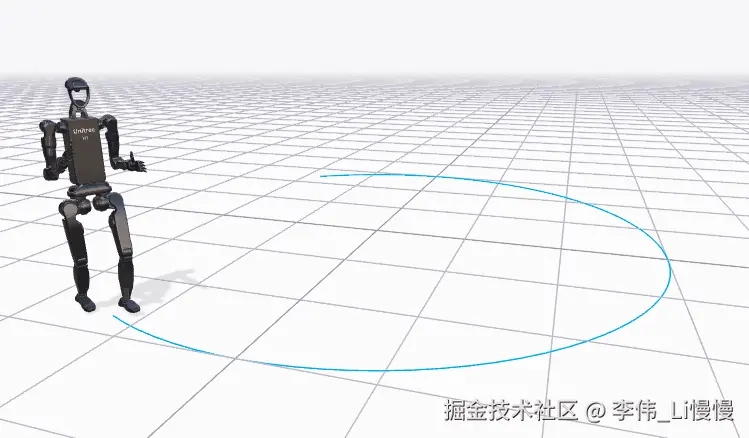
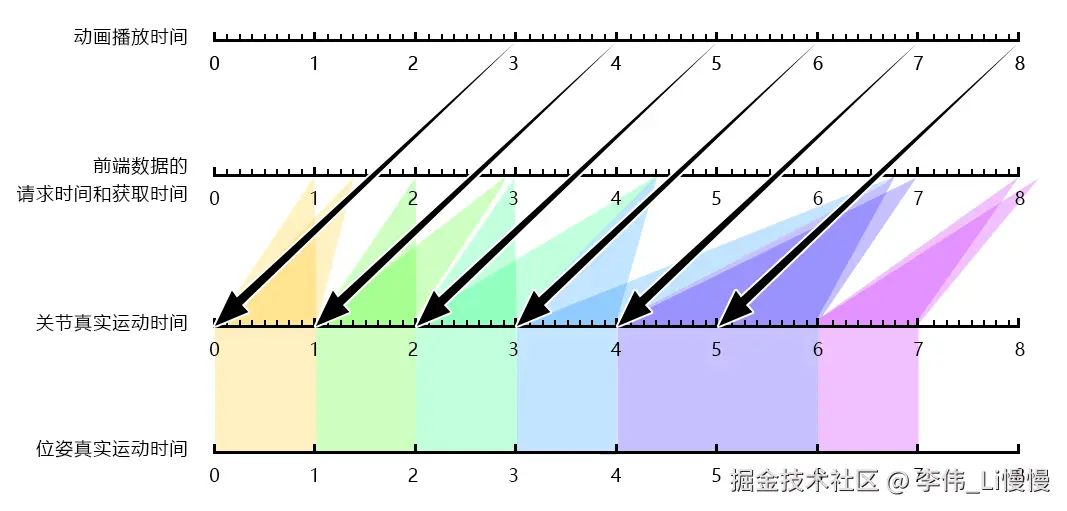
机器人实时动画缓冲技术。
- usda 静态资产的定制化解析。

课程目录
- urdf-loader简介
- 初始项目的搭建
- 解析URDF文件
- 用form控制URDF模型
- joint的拖拽旋转
- joint的拖拽推拉
- joint 拖拽变换辅助路径
- 信息提示面板
- 辅助对象-关节坐标系
- 辅助对象-碰撞体
- 辅助对象-质心
- 辅助对象-惯性矩
- 实时动画缓冲
- usda模型的定制化解析
课程收获
- 对机器人的URDF模型有一个透彻的认知
- 掌握机器人Web前端可视化的核心能力
- 拥有机器人相关公司的面试优势
注
本课程不会涉及任何我所从事过的公司任何机密信息。
课程里的URDF模型用的是开源模型,比如宇树H1机器人,Ros2的PR2机器人;
渲染引擎用的是three.js;
urdf 模型的解析和加载是参考的urdf-loader;
机器人辅助对象的可视化是参考的rviz;
usda 模型的解析参考的是three.js的USDLoader。