课程链接:www.bilibili.com/cheese/play...
代码链接:github.com/buglas/robo...
课程目标
- 了解实时动画的可视化需求
- 使用缓冲区实时播放动画
1-实时动画的需求
在机器人可视化项目中,实时动画是必不可少的。
前端开发者需要在浏览器里实时展示机器人的运动状态,从而实现机器人的远程监控功能。
机器人实时动画通常要满足以下需求:
-
实时性:展示机器人当前的运动状态。
此实时性并非绝对,因为本身数据传输就需要时间。可根据具体情况,在可承受范围内,设置一定的延迟时间,比如5s 。
-
准确性:基于时间,准确展示机器人的动画数据。
机器人可能存在多条时间线路的动画,比如机器人的位移会有一套每秒1帧的动画数据,关节会有一套每秒8帧的动画数据,我们需要做好这两者在时间上的对齐和补间。
-
流畅性:机器人动画的播放不能卡顿,在正常网速下要确保其流程性。
若确实网卡,或者请求时间过长,需要给用户反馈,使其知道原因,避免其误以为真实机器人卡顿。
2-实时数据的传输方式
在我们在说实时动画缓冲前,需要先了解动画数据。
2-1-实时数据的传输过程
在我遇到的项目中,机器人数据是这样传给前端的:硬件 → ROS → 后端 →前端
机器人会按照特定的频率向ROS 传递数据,比如每隔1s 传递一次机器人的位姿数据(机器人的位置和旋转数据)。
ROS 会按照特定的规则对机器人数据做处理和存储。
前端向后端发起数据请求后,后端会向ROS 请求相应数据,一般后端还会根据前端的具体需求,对数据做处理。
作为前端开发者,需要知道:
- 实时动画数据是按照特定频率给我们的。
- 前端获取到数据时,此数据必然是过去一段时间的机器人动画数据,因为有请求时间的延迟。
- 尽量减少数据的请求量,因为数据量会影响数据请求时间。
2-2-数据示例
以行走的机器人为例,说一下动画数据的结构和请求逻辑。
前端请求频率:后端会每隔1s 获取一次机器人的动画数据,因此前端也需要至少每隔1s 向后端请求一次数据。
请求时长的约束:数据请求时间不能过长,比如不能超过3s,若超3s,那就是后端问题。
数据采样频率:
- 机器人位姿数据的采集频率是1帧/s
- 机器人关节数据的采集频率是8帧/s
行走的机器人的位姿变化频率比较低,所以不需要频繁采样;关节的变化频率比较高,需要频繁采样。
单次请求到的数据结构如下:
ini
{
pose_timestamp:[
1772631875403,
1772631875503,
],
pose:[
[0,0,0,0,0,0,1], //[x,y,z,qx,qy,qz,qw]
[0,0,0,0,0,0,1],
],
joint_names:['jointA','jointB'],
joint_timestamp:[
1772631875403,
1772631876403,
1772631877403,
1772631878403,
1772631879403,
1772631880403,
1772631881403,
1772631882403,
],
joint_values:[
[1,2],
[2,3],
[3,4],
[1,2],
[2,3],
[3,4],
[1,2],
[2,3],
]
}根据实际情况,我们甚至可以再次降低低频数据的采样频率,比如每次请求,只采集一帧的位姿。
ini
{
pose_timestamp:[
1772631875403,
],
pose:[0,0,0,0,0,0,1],
...
}注:这种数据优化是需要根据机器人的实际运动情况确定的。
假如机器人是一个上蹿下跳的街舞机器人,那么位姿和关节都得有较高的采样频率。
当然,受人眼和浏览器刷新频率的限制,一般不用超过24帧/s。
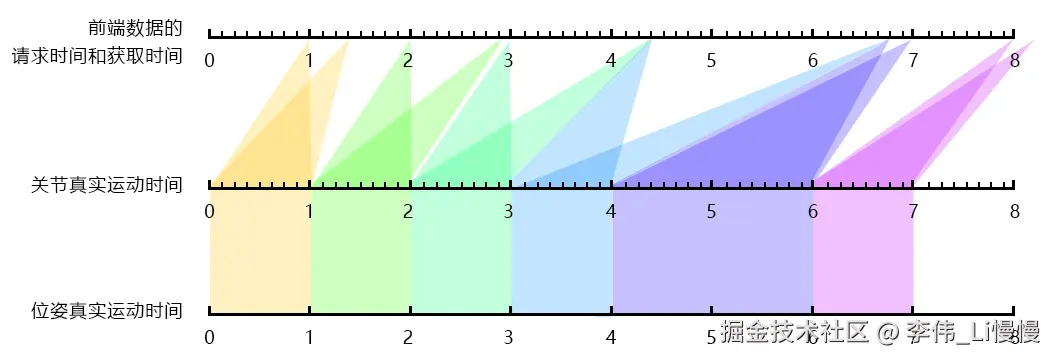
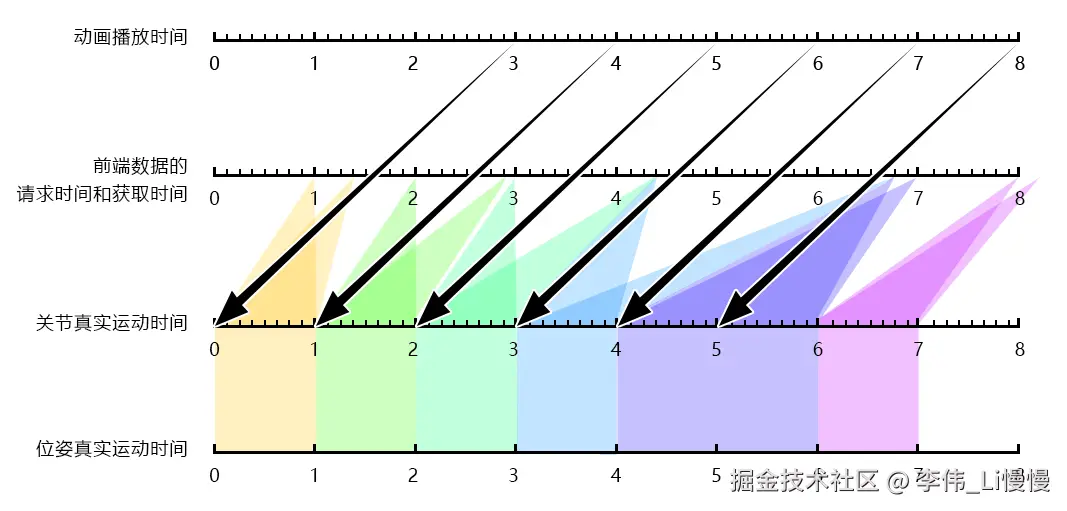
3-动画数据缓冲的原理
动画数据缓冲的原理是以一定时间的动画滞后为代价,存储少量数据,实现动画流畅、准确的播放。
比如,我缓存3s 数据,然后一边播放,一边继续缓存,如下图所示:
每隔一定时间,需清理过期的缓冲数据,避免卡满内存。
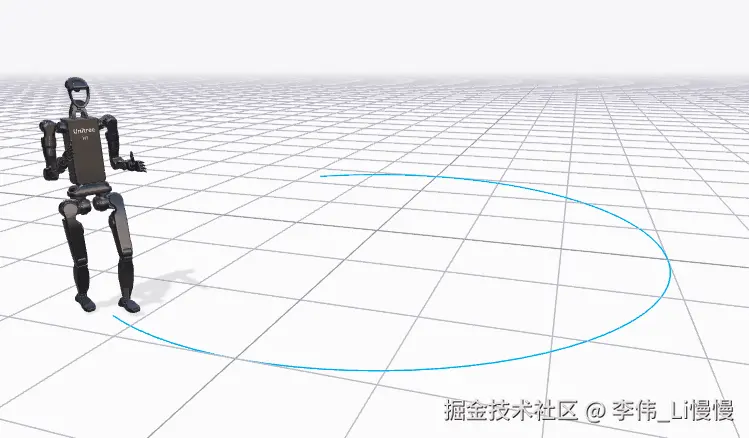
4-示例-多机器人实时动画场景
以多机器人实时行走动画为例,说一下实时动画缓冲的实现过程。
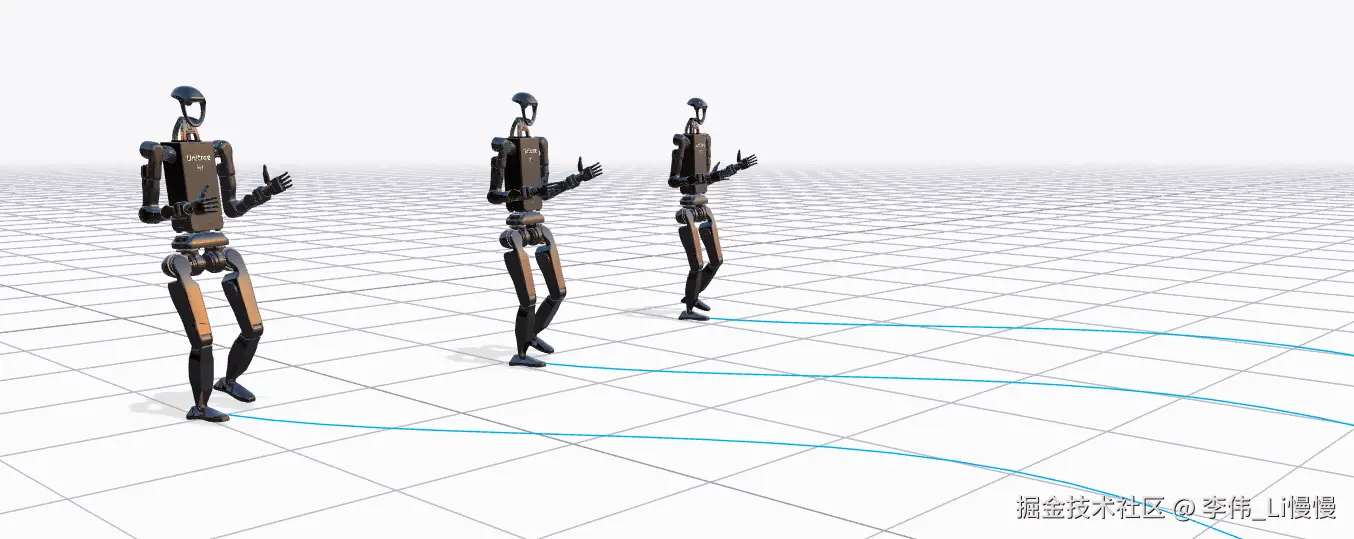
上面的机器人是宇树的H1机器人,机器人脚下的蓝色路径是规划路径。
4-1-代码架构思路
我在开发复杂动画项目的时候,一般会坚持2个原则:
- 图形与数据分离。这样可以避免图形管理和数据管理的混乱。
- 用requestAnimationFrame 管理动画时间,不用setTimeout或setInterval。后两者可控制很差,不如requestAnimationFrame 稳定。
当前项目会用到3个核心对象:
- RobotArea:机器人服务区,负责机器人图形的可视化展示。
- RobotBuffer:机器人缓冲对象,与机器人一对一关系,缓冲和清理动画化数据,做动画补间。
- RobotBufferManager:机器人缓冲对象管理器,按照特定频率请求动画数据,管理机器人缓冲对象的增、删、更新。
4-2-RobotBuffer 类
RobotBuffer的功能:
-
在第一次拿到动画数据时,初始化缓冲区。
-
下一次请求数据的时候,向缓冲区中添加数据。同时确定缓冲区是否可用。
-
在连续渲染时,若缓冲区可用,根据当前时间,在缓冲区中做补间运算。
比如第1秒的关节值是2,第2秒的关节值是4,若当前时间是1.5秒,那相应的关节值就是3。
-
每隔一段时间,清理过期数据。
整体代码如下:
- src/robot/RobotBuffer.ts
kotlin
import { Quaternion, Vector2 } from 'three'
import type { RobotBufferManager } from './RobotBufferManager'
// 机器人动画数据类型
export type RobotBufferDataType = {
// 机器人代号,唯一
device_number: string
// 机器人类型
device_type: string
// 位姿时间戳
pose_timestamp: number
// 位姿 [x,y,z,qx,qy,qz,qw]
pose: [number, number, number, number, number, number, number]
// 路径点位
path_points: number[]
// 关节名称集合
joint_names: string[]
// 关节时间戳
joint_timestamp: number[]
// 关节在一定时间段内的动画数据
joint_values: number[][]
}
/* 机器人缓冲对象 */
class RobotBuffer {
// 缓冲对象管理器
parent: RobotBufferManager
// 缓冲数据
poseTimestampBuffer: number[] = []
poseBuffer: number[][] = []
pathPointsBuffer: number[][] = []
jointTimestampBuffer: number[] = []
jointNames: string[] = []
jointValuesBuffer: number[][] = []
// 缓冲区是否可用
bufferOK = false
// 当前位置
position = new Vector2()
// 当前四元数
quaternion = new Quaternion()
// 当前关节数据
jointValues: number[] = []
// 当前路径
pathPoints: number[] = []
constructor(
robotData: RobotBufferDataType,
robotBufferManager: RobotBufferManager,
) {
this.parent = robotBufferManager
this.initData(robotData)
}
// 初始化数据
initData(robotData: RobotBufferDataType) {
const {
parent: { originTime },
} = this
if (originTime == undefined) {
return
}
const {
pose_timestamp,
pose,
path_points,
joint_names,
joint_values,
joint_timestamp,
} = robotData
// 缓冲数据
this.poseTimestampBuffer = [pose_timestamp - originTime]
this.poseBuffer = [pose]
this.pathPointsBuffer = [path_points]
this.jointNames = joint_names
this.jointTimestampBuffer = joint_timestamp.map((time) => {
return time - originTime
})
this.jointValuesBuffer = [...joint_values]
// 位姿
const [x, y, z, qx, qy, qz, qw] = pose
this.position.set(x, y)
this.quaternion.set(qx, qy, qz, qw).normalize()
// 路径
this.pathPoints = path_points
}
// 向缓冲区添加数据
addData(robotData: RobotBufferDataType) {
const {
poseTimestampBuffer,
poseBuffer,
pathPointsBuffer,
jointTimestampBuffer,
jointValuesBuffer,
parent: { originTime },
} = this
if (originTime == undefined) {
return
}
const { pose_timestamp, pose, path_points, joint_timestamp, joint_values } =
robotData
poseTimestampBuffer.push(pose_timestamp - originTime)
poseBuffer.push(pose)
pathPointsBuffer.push(path_points)
jointValuesBuffer.push(...joint_values)
jointTimestampBuffer.push(
...joint_timestamp.map((time) => time - originTime),
)
this.updateBufferState()
}
// 更新缓冲状态
updateBufferState() {
const {
poseTimestampBuffer,
parent: { bufferDuration, minBufferCount },
} = this
const bufferCount = poseTimestampBuffer.length
// 缓冲数量校验
if (bufferCount < minBufferCount) {
this.bufferOK = false
return
}
// 缓冲时间校验
const time1 = poseTimestampBuffer[0]
const time2 = poseTimestampBuffer[bufferCount - 1]
if(time1==undefined||time2==undefined){
this.bufferOK=false
} else {
this.bufferOK = time2 - time1 > bufferDuration
}
}
// 更新动画数据
update(time: number) {
const {
poseTimestampBuffer,
poseBuffer,
pathPointsBuffer,
jointTimestampBuffer,
jointNames,
jointValuesBuffer,
} = this
// 位姿补间
this.tween(time, poseTimestampBuffer, (insert, i1, i2) => {
const pose1 = poseBuffer[i1]
const pose2 = poseBuffer[i2]
if (pose1 && pose2) {
this.position.lerpVectors(
new Vector2(pose1[0], pose1[1]),
new Vector2(pose2[0], pose2[1]),
insert,
)
this.quaternion.slerpQuaternions(
new Quaternion(pose1[3], pose1[4], pose1[5], pose1[6]).normalize(),
new Quaternion(pose2[3], pose2[4], pose2[5], pose2[6]).normalize(),
insert,
)
}
this.pathPoints = pathPointsBuffer[i2] || []
})
// 关节补间
this.tween(time, jointTimestampBuffer, (insert, i1, i2) => {
const jointsValue1 = jointValuesBuffer[i1]
const jointsValue2 = jointValuesBuffer[i2]
if (jointsValue1 && jointsValue2) {
this.jointValues = jointNames.map((jointName, jointIndex) => {
const v1 = jointsValue1[jointIndex]
const v2 = jointsValue2[jointIndex]
if(v1==undefined||v2==undefined){
return 0
} else {
return v1 + (v2 - v1) * insert
}
})
}
})
}
// 基于时间的补间函数
tween(
time: number,
timestampBuffer: number[],
callback = (insert: number, i1: number, i2: number) => {},
) {
// 当前时间的前一帧索引
const i1 = this.preFrameIdx(time, timestampBuffer)
if (i1 != undefined) {
// 当前时间的下一帧索引
const i2 = i1 + 1
// 当前时间的前一帧时间
const t1 = timestampBuffer[i1]
// 当前时间的下一帧时间
const t2 = timestampBuffer[i2]
if (t1 !== undefined && t2 !== undefined) {
// 当前时间在前后2帧间的插值
const insert = (time - t1) / (t2 - t1)
callback(insert, i1, i2)
}
}
}
// 清理当前时间的上一帧之前的数据
clearExpiredData(time: number) {
const {
poseTimestampBuffer,
poseBuffer,
pathPointsBuffer,
jointTimestampBuffer,
jointValuesBuffer,
} = this
// 当前时间的上一帧索引
let idx = this.preFrameIdx(time, poseTimestampBuffer, 1)
// 清理位姿和路径数据
if (idx !== undefined) {
poseTimestampBuffer.splice(0, idx)
poseBuffer.splice(0, idx)
pathPointsBuffer.splice(0, idx)
}
// 清理关节数据
const jointTimeIdx = this.preFrameIdx(time, jointTimestampBuffer, 1)
if (jointTimeIdx !== undefined) {
jointTimestampBuffer.splice(0, idx)
jointValuesBuffer.splice(0, idx)
}
}
// 当前时间的前一帧索引
preFrameIdx(time: number, timestampBuffer: number[], startIdx = 0) {
let timeIdx: number | undefined
for (let i = startIdx, len = timestampBuffer.length; i < len; i++) {
if (time > (timestampBuffer[i] || 0)) {
timeIdx = i
} else {
break
}
}
return timeIdx
}
}
export { RobotBuffer }4-3-RobotBufferManager 类
RobotBufferManager 的功能:
- 按照特定的频率请求动画数据。
- 对缓冲对象进行统一初始化、添加数据、删除缓冲区、更新缓冲区。
- 向图形类传递图形相关的操作事件。
整体代码如下:
- src/robot/RobotBufferManager.ts
typescript
import { EventDispatcher} from 'three'
import { TimeController, TimeDelayController } from './utils'
import { fetchPoseList_test } from './FetchData'
import { RobotBuffer, type RobotBufferDataType } from './RobotBuffer'
/* 机器人缓冲对象管理器,图形与数据分离*/
class RobotBufferManager extends EventDispatcher<any> {
// 机器人时间基点,即所有时间戳里最小的时间
originTime: number | undefined
// 动画开始的时间
playTime: number | undefined
// 最短缓冲时长
bufferDuration: number = 5000
// 最少缓冲数据量
minBufferCount: number = 4
// 连续请求的最短间隔时间
minDuration: number = 1000
// 动画数据的请求延迟工具
delayFetchController = new TimeDelayController()
// 销毁过期数据的时间延迟工具
clearExpiredController = new TimeController(1000)
// 机器人缓冲对象集合
robotBufferMap: Map<string, RobotBuffer> = new Map()
// 缓冲区是否可用
bufferOK: boolean | undefined
constructor() {
super()
// 监听页面的显示与隐藏
window.addEventListener('visibilitychange', () => {
if (document.visibilityState == 'hidden') {
this.dispose()
} else {
this.delayFetchBufferData()
}
})
}
// 延时请求缓冲数据
async delayFetchBufferData() {
const { robotBufferMap, originTime, minDuration, delayFetchController } =
this
const fetchTime = Date.now()
// 获取动画数据
// const robotDataList = await fetchPoseList()
// 测试
const robotDataList = await fetchPoseList_test()
// 延时
const timeDiff = Date.now() - fetchTime
const delay = Math.max(0, minDuration - timeDiff)
delayFetchController.setDelayTime(delay)
if (!robotDataList || !robotDataList.length) {
return
}
// 若没有originTime,初始化originTime
if (originTime == undefined) {
this.initOriginTime(robotDataList)
}
// 现有的机器人device_number 集合
const deviceNumberList = [...robotBufferMap.keys()]
// 新增的机器人数据集合
const newRobotDataList: RobotBufferDataType[] = []
robotDataList.forEach((robotData: RobotBufferDataType) => {
const { device_number } = robotData
// 根据device_number查找机器人缓冲对象
const robotBuffer = robotBufferMap.get(device_number)
// 若robotBuffer,添加缓冲数据;否则,创建缓冲对象。
if (robotBuffer) {
//向机器人缓冲对象中添加缓冲数据
robotBuffer.addData(robotData)
// 从deviceNumberList删除此机器人,以备后用
const idx = deviceNumberList.indexOf(device_number)
deviceNumberList.splice(idx, 1)
} else {
// 创建机器人缓冲对象
const robotBuffer = new RobotBuffer(robotData, this)
this.robotBufferMap.set(device_number, robotBuffer)
// 新机器人集合,以备后用
newRobotDataList.push(robotData)
}
})
// deviceNumberList若非空,则表示有机器人要被销毁
deviceNumberList.forEach((device_number) => {
// 销毁缓冲数据
robotBufferMap.delete(device_number)
})
// 向图形类传递新增机器人事件
newRobotDataList.length &&
this.dispatchEvent({
type: 'hasNewRobots',
robotDataList: newRobotDataList,
})
// 向图形类传递销毁机器人事件
deviceNumberList.length &&
this.dispatchEvent({ type: 'hasOldRobots', deviceNumberList })
}
// 设置机器人时间基点,取所有时间戳的最小值
initOriginTime(robotsData: RobotBufferDataType[]) {
const times = robotsData.map(({ pose_timestamp, joint_timestamp }) => {
if (joint_timestamp && joint_timestamp.length) {
return Math.min(pose_timestamp, joint_timestamp[0]||0)
} else {
return pose_timestamp
}
})
this.originTime = Math.min(...times)
}
// 更新动画
update() {
const { robotBufferMap, delayFetchController, clearExpiredController } =
this
// 延迟请求数据
delayFetchController.run(() => {
this.delayFetchBufferData()
})
// 判断缓冲时间和数据量是否OK
const bufferOK = this.isBufferOk()
if (bufferOK !== this.bufferOK) {
this.bufferOK = bufferOK
this.dispatchEvent({ type: 'bufferOkChange', bufferOK })
}
if (!bufferOK) {
return
}
// 记录动画开始的时间
if (this.playTime == undefined) {
this.playTime = Date.now()
}
// 相对时间,与缓冲数据同一时间维度
const time = Date.now() - this.playTime
// 更新所有缓冲对象的动画数据
robotBufferMap.forEach((robotBuffer) => {
robotBuffer.update(time)
})
// 向图形类传递更新机器人的事件
this.dispatchEvent({ type: 'updateRobots', robotBufferMap })
// 每隔一定的时间,销毁一次过期数据
clearExpiredController.run(() => {
robotBufferMap.forEach((robotBuffer) => {
robotBuffer.clearExpiredData(time)
})
})
}
// 缓冲时间和数据量是否OK
isBufferOk() {
const { robotBufferMap, originTime } = this
// 基础判断
if (originTime == undefined || !robotBufferMap.size) {
return false
}
// 需要所有缓冲对象的缓冲区都有效
for (let robotBuffer of robotBufferMap.values()) {
if (!robotBuffer.bufferOK) {
return false
}
}
return true
}
// 销毁数据
dispose() {
this.robotBufferMap.clear()
this.playTime = undefined
this.originTime = undefined
}
}
export { RobotBufferManager }
export type { RobotBufferDataType }解释一下上面的几个知识点。
TimeDelayController 时间延迟工具可以延迟数据的请求,其代码如下:
typescript
// 时间延迟器
class TimeDelayController{
startTime:number=Date.now()
delayTime:number
finished=false
constructor(delayTime=0){
this.delayTime=delayTime
}
setDelayTime(delayTime:number=0){
this.finished=false
this.delayTime=delayTime
this.startTime=Date.now()
}
run(fn:()=>void){
const {delayTime,startTime,finished}=this
if(finished){return}
const now=Date.now()
const diff=now-startTime
if(diff>=delayTime){
fn()
this.startTime=now
this.finished=true
}
}
close(){
this.finished=true
}
}fetchPoseList_test() 是请求实时数据的方法,其数据是我用假数据模拟的,但代码逻辑是经过了实战验证的。
4-4-RobotArea 类
RobotArea 类的功能:
- 构建渲染环境,渲染机器人。
- 根据缓冲对象传递的事件和数据,创建、更新和删除机器人。
整体代码如下:
- src/robot/RobotArea.ts
scss
import {
Box3,
BufferAttribute,
BufferGeometry,
Color,
DirectionalLight,
EquirectangularReflectionMapping,
EventDispatcher,
Fog,
GridHelper,
Group,
Line,
LineBasicMaterial,
LoadingManager,
Mesh,
MeshBasicMaterial,
PerspectiveCamera,
PlaneGeometry,
Scene,
ShadowMaterial,
Texture,
WebGLRenderer,
} from 'three'
import { URDFRobot } from './URDFClasses'
import { TimeController } from './utils'
import { ResourceTracker } from './ResourceTracker'
import { URDFLoader } from './URDFLoader'
import { OrbitControls } from 'three/examples/jsm/controls/OrbitControls.js'
import { HDRLoader } from 'three/examples/jsm/loaders/HDRLoader.js'
import {RobotBuffer,type RobotBufferDataType} from './RobotBuffer'
import {RobotBufferManager} from './RobotBufferManager'
/* 机器人服务区 */
class RobotArea extends EventDispatcher<any> {
// 渲染环境
renderer = new WebGLRenderer({
antialias: true,
logarithmicDepthBuffer: true,
})
scene = new Scene()
camera = new PerspectiveCamera(45, 1, 1, 1000)
orbitControls = new OrbitControls(this.camera, this.renderer.domElement)
// 包裹所有模型的group,用于矫正以z轴为上方向的坐标系
tfGroup = new Group()
// 所有类型的机器人的URDF地址
robotUrlListPromise: Promise<{ [k: string]: string }>
// 机器人模型库,存储不同类型的机器人
protoRobotMap = new Map<string, URDFRobot>()
// 机器人缓冲对象管理器
robotBufferManager = new RobotBufferManager()
// 机器人集合
robots = new Group()
// 机器人路径集合
paths = new Group()
// 路径材质
pathMat = new LineBasicMaterial({ color: 0x00acec })
// 动画更新频率
timer16f = new TimeController(1000 / 16)
// 连续渲染帧
continuousFrame = 0
// 资源追踪器
resourceTracker = new ResourceTracker()
constructor() {
super()
const {
renderer,
scene,
tfGroup,
robots,
paths,
resourceTracker,
orbitControls,
camera,
robotBufferManager,
} = this
// 获取所有类型的机器人的url
this.robotUrlListPromise = this.getRobotUrlList()
// 开启渲染器投影
renderer.shadowMap.enabled = true
// 场景背景色
scene.background = new Color(0xf6f6f8)
// 场景雾效
scene.fog = new Fog(0xf6f6f8, 20, 50)
// 环境光
new HDRLoader()
.loadAsync('/texture/venice_sunset_1k.hdr')
.then((texture:Texture) => {
texture.mapping = EquirectangularReflectionMapping
scene.environment = texture
resourceTracker.track(texture)
})
// 灯光
const light = new DirectionalLight(0xffffff, 1)
light.position.set(0, 10, 5)
light.castShadow = true
scene.add(light)
resourceTracker.track(light)
// 地面Geometry
const floorGeometry = new PlaneGeometry(100, 100)
// 地面
const floorMaterial = new MeshBasicMaterial({
color: 0xffffff,
transparent: true,
opacity: 0.5,
})
const floorMesh = new Mesh(floorGeometry, floorMaterial)
floorMesh.rotateX(-Math.PI / 2)
floorMesh.position.y = -0.005
scene.add(floorMesh)
resourceTracker.track(floorMesh)
// 地面阴影
const floorShadowMaterial = new ShadowMaterial({
transparent: true,
opacity: 0.1,
})
const floorShadowMesh = new Mesh(floorGeometry, floorShadowMaterial)
floorShadowMesh.rotateX(-Math.PI / 2)
floorShadowMesh.receiveShadow = true
scene.add(floorShadowMesh)
resourceTracker.track(floorShadowMesh)
// 地面网格
const floorGrid = new GridHelper(100, 100, 0x9c9aa5, 0xbcbac7)
scene.add(floorGrid)
resourceTracker.track(floorGrid)
// 矫正z轴朝上的坐标系
tfGroup.rotation.x = -Math.PI / 2
tfGroup.add(robots)
tfGroup.add(paths)
scene.add(tfGroup)
// 设置镜头
camera.position.set(2,2, 6)
orbitControls.target.set(0, 0,0)
orbitControls.update()
// 出现新的机器人时,需将此机器人添加到场景中
robotBufferManager.addEventListener('hasNewRobots', ({ robotDataList }) => {
this.createRobots(robotDataList)
})
// 出现无需展示的机器人,需在场景中删除此机器人和路径
robotBufferManager.addEventListener('hasOldRobots', ({ deviceNumberList }) => {
this.deleteRobots(deviceNumberList)
})
// 更新机器人
robotBufferManager.addEventListener(
'updateRobots',
({ robotBufferMap }) => {
this.updateRobots(robotBufferMap)
},
)
}
createRobots(robotDataList: any) {
const { protoRobotMap } = this
// 新增机器人类型
const newRobotTypeList = new Set<string>()
// 新增机器人的数据
const newRobotDataList: RobotBufferDataType[] = []
// 若新增的机器人类型在机器人原型库中存在,则将此机器人添加到场景中;
// 否则,先获取机器人原型,再添加到场景。
robotDataList.forEach((robotData: any) => {
const { device_type } = robotData
const robot = protoRobotMap.get(device_type)
if (robot) {
this.addRobot(robotData, robot)
} else {
newRobotTypeList.add(device_type)
newRobotDataList.push(robotData)
}
})
if (newRobotTypeList.size) {
this.robotUrlListPromise.then((robotUrlList) => {
// 加载新类型的机器人,并添加到原型库
this.loadURDFModels(newRobotTypeList, robotUrlList, () => {
// 添加新机器人
newRobotDataList.forEach((robotData) => {
const protoRobot = protoRobotMap.get(robotData.device_type)
protoRobot && this.addRobot(robotData, protoRobot)
})
})
})
}
}
// 删除机器人
deleteRobots(deviceNumberList: string[]) {
const { robots, paths } = this
deviceNumberList.forEach((deviceNumber: string) => {
robots.getObjectByName(deviceNumber)?.removeFromParent()
paths.getObjectByName(deviceNumber)?.removeFromParent()
})
}
// 更新机器人
updateRobots(robotBufferMap: Map<string, RobotBuffer>) {
const { robots, paths } = this
// 更新机器人位姿和关节
;(robots.children as URDFRobot[]).forEach((robot) => {
const {
name,
userData: { jointMap },
} = robot
const robotBuffer = robotBufferMap.get(name)
if (!robotBuffer) {
return
}
const { position, quaternion, jointValues, jointNames } = robotBuffer
// 更新位姿
robot.position.x = position.x
robot.position.y = position.y
robot.quaternion.copy(quaternion)
// 更新关节
jointNames.forEach((jointName, jointInd) => {
const jointValue = jointValues[jointInd]
jointValue && jointMap.get(jointName)?.setValue(jointValue)
})
})
// 更新路径
;(paths.children as Line[]).forEach((path) => {
const robotBuffer = robotBufferMap.get(path.name)
if (!robotBuffer) {
return
}
path.geometry.dispose()
path.geometry.setAttribute(
'position',
new BufferAttribute(new Float32Array(robotBuffer.pathPoints), 3),
)
})
}
// 获取所有机器人的url
async getRobotUrlList() {
return fetch('/data/urdf_list.json')
.then((res) => res.json())
.then(({ data }) => {
return data
})
}
// 添加机器人
addRobot(robotData: RobotBufferDataType, protoRobot: URDFRobot) {
const { robots, paths, pathMat, resourceTracker } = this
const { device_number, pose } = robotData
// 避免重复添加
for (let robot of robots.children) {
if (robot.name == device_number) {
return
}
}
// 创建机器人对象
const robot = protoRobot.clone()
robot.name = device_number
robot.position.x = pose[0]
robot.position.y = pose[1]
robot.quaternion.set(pose[3], pose[4], pose[5], pose[6])
robots.add(robot)
// 创建机器人路径
const path = new Line(new BufferGeometry(), pathMat)
path.frustumCulled = false
path.name = device_number
paths.add(path)
resourceTracker.track(path)
}
// 加载机器人
loadURDFModels(
newRobotTypeList: Set<string>,
robotUrlList: { [k: string]: string },
onLoad = () => {},
) {
const { protoRobotMap, resourceTracker } = this
// 暂存机器人
const protoRobotMapTemp = new Map<string, URDFRobot>()
// 批量加载机器人原型
const manager = new LoadingManager()
newRobotTypeList.forEach((type: string) => {
const robotUrl = robotUrlList[type]
if (!robotUrl) {
console.warn('机器人url 不存在:', robotUrl)
return
}
const urdfLoader = new URDFLoader(manager)
urdfLoader.load(robotUrl, (protoRobot: any) => {
// 此时protoRobot 中的模型文件尚未加载完成
protoRobotMapTemp.set(type, protoRobot)
})
})
manager.onError = () => {
console.error('机器人加载出错!')
}
manager.onLoad = () => {
newRobotTypeList.forEach((type: string) => {
const protoRobot = protoRobotMapTemp.get(type)
if (!protoRobot) {
return
}
// protoRobot 中的模型文件加载完成
protoRobotMap.set(type, protoRobot)
// 确保机器人落地
const box3 = new Box3()
box3.setFromObject(protoRobot)
protoRobot.position.z -= box3.min.z
resourceTracker.track(protoRobot)
})
onLoad()
}
}
// 连续渲染
continuousRender() {
const { renderer, scene, camera, timer16f, robotBufferManager } = this
// 以16帧/s的频率渲染动画
timer16f.run(() => {
// 更新机器人动画
robotBufferManager.update()
// 渲染
renderer.render(scene, camera)
})
this.continuousFrame = requestAnimationFrame(
this.continuousRender.bind(this)
)
}
// 设置渲染尺寸
resize(width: number, height: number) {
const { renderer, camera } = this
camera.aspect = width / height
camera.updateProjectionMatrix()
renderer.setSize(width, height, true)
}
// 清理内存
dispose() {
cancelAnimationFrame(this.continuousFrame)
this.robotBufferManager.dispose()
this.resourceTracker.dispose()
this.renderer.dispose()
this.orbitControls.dispose()
this.renderer.domElement.remove()
}
}
export { RobotArea }TimeController 类将连续渲染的频率设置为16帧/s,代码如下:
typescript
// 线性计时器
class TimeController{
duration:number
startTime:number=0
constructor(duration:number=40){
this.duration=duration
this.startTime=Date.now()
}
run(fn:()=>void){
const {duration,startTime}=this
const now=Date.now()
const diff=now-startTime
if(diff>=duration){
fn()
this.startTime=now
}
}
}4-5-App.vue
在App.vue 中示例化RobotArea 类,便可以看到效果。
- src/App.vue
xml
<script setup lang="ts">
import { onMounted, onUnmounted, ref } from "vue";
import { RobotArea } from "./robot/RobotArea";
import { ElMessage, type MessageHandler } from "element-plus";
/* canvas 画布的Ref对象 */
const canvasWrapperRef = ref<HTMLDivElement>();
/* 机器人可视化 */
const robotArea = new RobotArea();
/* 监听缓冲状态 */
let msg:MessageHandler;
robotArea.robotBufferManager.addEventListener('bufferOkChange',({bufferOK})=>{
ElMessage.closeAll()
if(!bufferOK){
msg=ElMessage({
message:'动画数据缓冲中......',
duration:0
})
}else{
msg.close()
}
})
/* 自适应窗口尺寸 */
window.addEventListener("resize", onResize);
function onResize() {
const canvasWrapper = canvasWrapperRef.value;
canvasWrapper&&robotArea.resize(canvasWrapper.clientWidth, canvasWrapper.clientHeight);
}
onMounted(() => {
onResize();
const canvasWrapper = canvasWrapperRef.value;
canvasWrapper && canvasWrapper.append(robotArea.renderer.domElement);
robotArea.continuousRender();
});
onUnmounted(() => {
window.removeEventListener("resize", onResize);
robotArea.dispose();
});
</script>
<template>
<div id="canvasWrapper" ref="canvasWrapperRef">
</div>
</template>
<style scoped>
#canvasWrapper {
height: 100%;
overflow: hidden;
}
</style>总结
这一章说了机器人实时动画缓冲的原理和实现过程。
再继续延伸的话,就可以把机器人的工作站也放到服务区中,进行可视化渲染和交互。
实际项目还会更复杂,并涉及各种边界问题的判断和兼容,比如展示机器人的异常状态,哪个机器人发生异常了,就给它飘红。这些都是比较简单的业务逻辑,所以我就没有赘述。
在机器人公司的实际工作中,除了我这个课程说的内容,我们还会遇到很多跟运控、ROS或仿真相关的需求,给大家举几个例子:
- 机器人在工厂中的二维导航地图。
- 灵巧手的压力可视化。
- USD 格式的静态资产的可视化。
- 机器人标注,比如截取机器人动画的某一个时间段,或者画面的一部分。
- 三维模型的优化,比如减少模型面数,优化模型材质。
- 用表单或Echarts 展示机器人数据。
机器人在前端的可视化是相对比较浅的,并没有太多可以深挖的技术,若大家对机器人感兴趣,可以向机器仿真过度,研究其仿真算法。
算法和硬件是机器人的两大核心。
下一章我们会说一下USDA 模型的解析。