一、引入
1、神经网络控制的优越性
(1)传统的基于模型的控制方式,是根据被控对象的数学模型及对控制系统要求的性能指标来设计控制器,并对控制规律加以数学解析描述。
(2)模糊控制基于专家经验和领域知识总结出若干条模糊控制规则,构成描述具有不确定性、复杂对象的模糊关系,通过被控系统输出误差及误差变化和模糊关系的推理合成获得控制量,从而对系统进行控制。
(3)相比于前两种控制,神经网络控制具有很强的逼近非线性函数的能力,即非线性映射能力,神经网络用于控制正是利用这个独特的优点。
①神经网络可以处理那些难以用模型或规则描述的过程或系统。
②神经网络采用并行分布式信息处理方式,具有很强的容错性。
③神经网络是本质的非线性系统。
④神经网络具有很强的信息综合能力。
⑤神经网络的硬件实现愈趋方便。
(4)神经网络在控制中的主要作用:
①在反馈控制系统中充当控制器的作用。
②在基于精确模型的各种控制结构中充当对象的模型。
③在传统控制系统中起优化计算作用。
④在与其它智能控制方法和优化算法如模糊控制、专家控制及遗传算法相融合中,为其提供非参数化对象模型、优化参数、推理模型及故障诊断等。
2、神经网络控制器的分类
(1)按照神经网络在控制器中的作用不同一般分为两类:
①一类称神经网络控制,它是以神经网络为基础而形成的独立智能控制系统。
②另一类称为混合神经网络控制,它代表着那些利用神经网络学习和优化能力来改善传统控制的现代控制方法。
(2)一些典型的神经网络的控制结构和学习方式可归结为七类:导师指导下的控制器、逆控制器、自适应网络控制器、神经内模控制结构、前馈控制结构、自适应评价函数、混合控制系统。
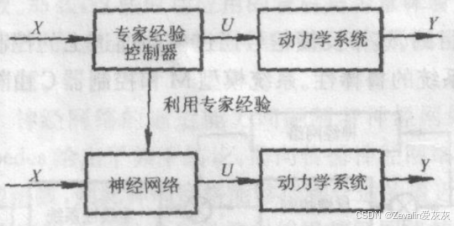
①导师指导下的控制器:
神经网络的输入信号来自传感器的信息和命令信号,神经网络的输出就是系统的控制信号
一旦神经网络的训练达到了能够充分描述人的控制行为,则网络训练结束,神经网络控制器就可以直接投入实际系统的控制
②逆控制器:
③自适应网络控制器:
自适应控制系统要求控制器能够随着系统环境或参数的变化而对控制器进行调节(在线逼近未知非线性动态,并自适应更新网络权值),以便达到最优控制的特性
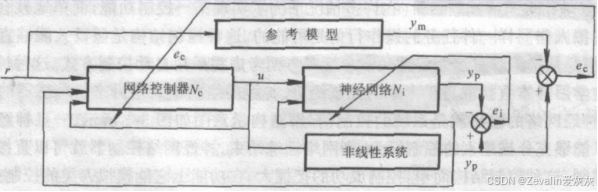
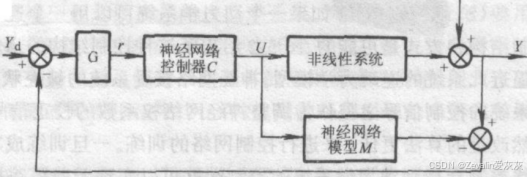
④神经内模控制结构:
用一个神经网络作为模型状态估计器,另一个神经网络作为控制器,被控系统的实际输出与模型M的输出信号差作为反馈
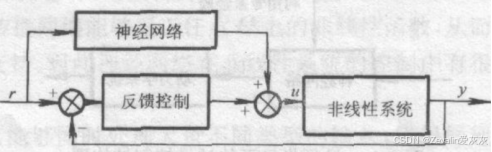
⑤前馈控制结构:
单纯的求逆控制结构不能很好地起到抗干扰能力,因此可结合反馈控制的思想,组成前馈补偿器的网络控制结构,在误差产生前,直接测量可测扰动,提前补偿
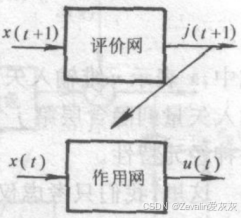
⑥自适应评价函数:
整个学习系统由一个相关的搜索单元和一个自适应评价单元组成,在这个算法中,相关搜索单元是作用函数,自适应评价单元为评价网络(相当于最优控制中的代价函数J,随系统状态、环境或学习进程动态调整,而非固定)
⑦混合控制系统:
是由神经网络技术与模糊控制、专家系统等相结合形成的一种具有很强学习能力的智能控制系统,它集人工智能各分支的优点,使系统同时具有学习、推理和决策能力,成为智能控制的最新发展方向
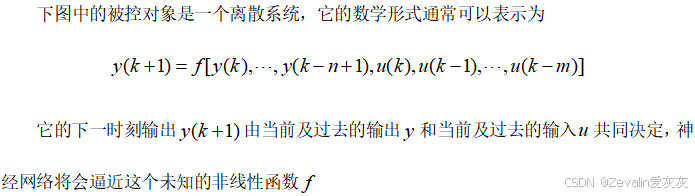
二、非线性动态系统的神经网络辨识
1、神经网络的辨识基础
(1)所谓辨识,是在输入和输出数据的基础上,从一组给定的模型中,确定一个与所测系统等价的模型。
①输入/输出数据指能够量测到的系统的输入/输出。
②模型类指所考虑的系统的结构。
③等价准则指辨识的优化目标。
(2)神经网络系统本质上是一种非线性映射,它可以从某一输入空间通过网络变换,映射到输出空间,因此,训练神经网络的过程是非线性函数的逼近过程。多层前向传播网络能够逼近空间上的任意非线性函数,关键在于如何确定隐含层和隐含激励神经元的个数。
(3)训练神经网络前需要考虑的三大因素:
①模型的选择------精确性和复杂性的权衡。
②输入信号的选择------持续的激励信号,充分激励足以覆盖系统的频谱(类似于采样定理,信号点过少,将会引起失真)。
③误差准则的选择------可且不仅可选择如下误差的泛函。

(4)神经网络的辨识在确定上述三大要素之后就归结为一个最优化问题,它不是传统的参数估计问题,有五个特点:
①不要求建立实际系统的辨识格式。
②可以对本质非线性系统进行辨识,是通过网络外部的输入/输出来拟合系统的输入/输出。
③辨识的收敛速度不依赖于待辨识系统的维数,只与算法有关。
④神经网络有大量连接权,通过调节权值逼近系统输出。
⑤作为实际系统的辨识模型,是一个物理实现,可在线控制。
2、神经网络辨识模型的结构
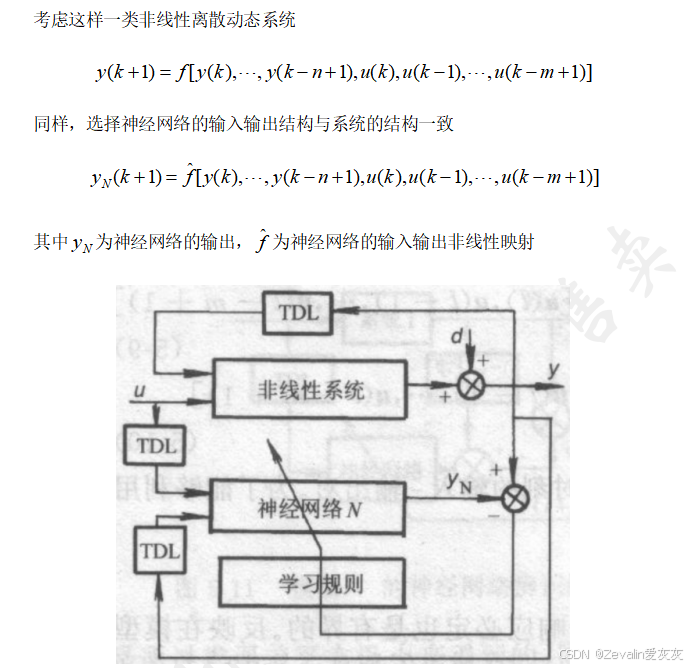
(1)前向建模:
前向建模,是利用神经网络来逼近非线性系统的前向动力学模型,神经网络模型在结构上与实际系统并行
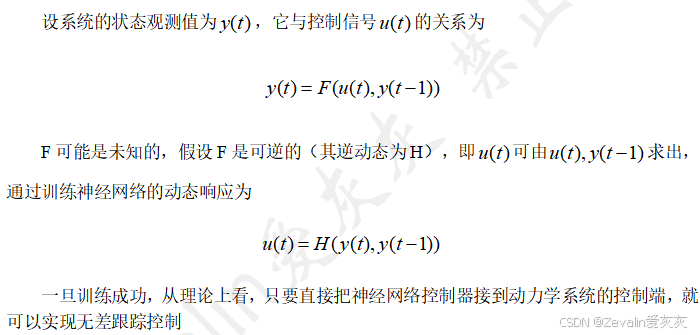
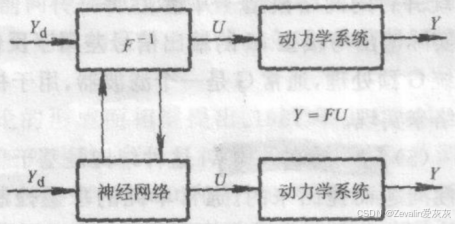
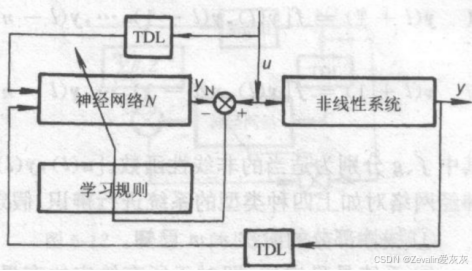
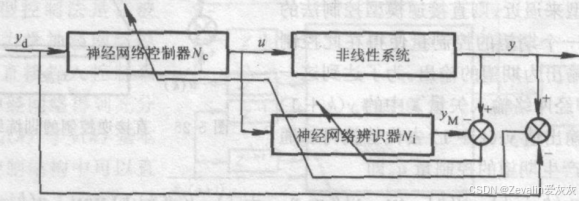
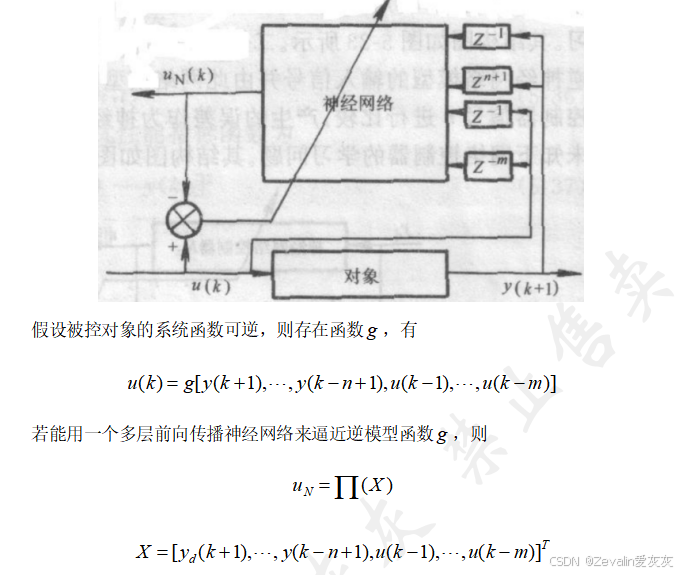
(2)逆模型法:
逆模型建立的最直接的方法是将系输出作为网络输入,将网络输出与期望输出(即系统的输入)进行比较得到的误差作为此神经网络训练的信号
逆模型法的学习过程不一定是目标最优的,可以适当在稳态下加入一个小信号的随机输入信号,或者采用下图所示的逆模型建模结构(用前向神经网络训练逆模型网络),即逆模型的输入遍及整个系统的输入空间,但这又引伸出了新的缺点,训练依赖前向模型的精度,如果前向模型辨识不准,逆模型训练也会出错,而且需要两个网络,结构相对复杂
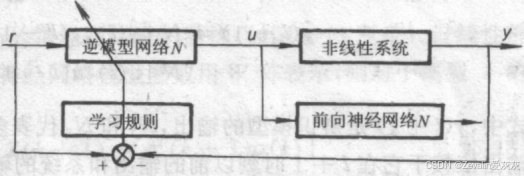
除此之外,一旦非线性系统的对应关系不是一对一的,那么不准确的逆模型可能会被建立
三、神经网络控制的学习机制
1、神经网络的学习方法
(1)神经网络辨识器的期望输出值和系统实际值应该是一致的,因此样本信息是已知的;而神经网络控制器的样本是系统的最佳控制量,是未知的。
(2)神经网络的学习方法就是寻找一种有效的途径进行网络连接权阵或网络结构的修改,从而使得网络控制器输出的控制信号能够保证系统输出跟随系统的期望输出。
(3)两类神经网络的学习方法:
①监督式学习:有导师指导下的控制网络学习,包括离线学习法、在线学习法、反馈误差学习法、多网络学习法。
②增强式学习:无导师指导下的学习模式,通过某一评价函数来对网络的权系数进行学习和更新,最终达到有效控制的目的。
2、监督式学习
(1)离线学习法:
离线学习指的是,在计算机中用数据训练学习,训练完成后再放到实际系统里运行,运行时不再更新网络权值

(2)在线学习法:
在线学习指的是,控制器在实际系统运行时,一边输出控制信号,一边根据系统反馈的误差,实时更新神经网络的权值


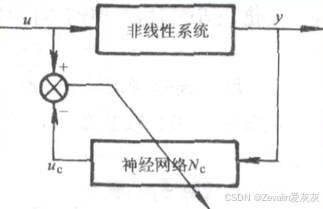
(3)反馈误差学习法:
控制系统的结构由前馈控制器和反馈控制器两部分组成
缺点:直接使用系统的误差信号去更新控制网络的权矩阵,而忽略了非线性系统本身的动态性能,因此可能导致学习算法的发散现象
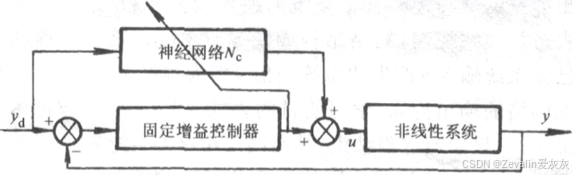
(4)多网络学习法:
利用神经网络辨识的手段在线识别出未知系统的动态模型,并利用此模型进行神经网络控制的设计和学习,且在学习过程中进一步改善模型的精确性,达到高精度的控制目的
①建立未知非线性动态系统的前向模型:
②建立未知非线性动态系统的逆模型:
四、神经网络控制器的设计
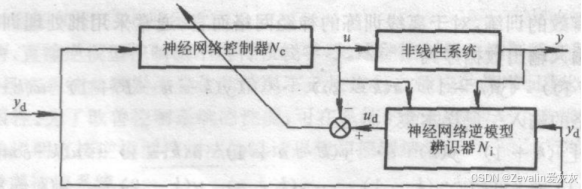
1、神经网络直接逆模型控制法
(1)直接逆模型的训练结构:
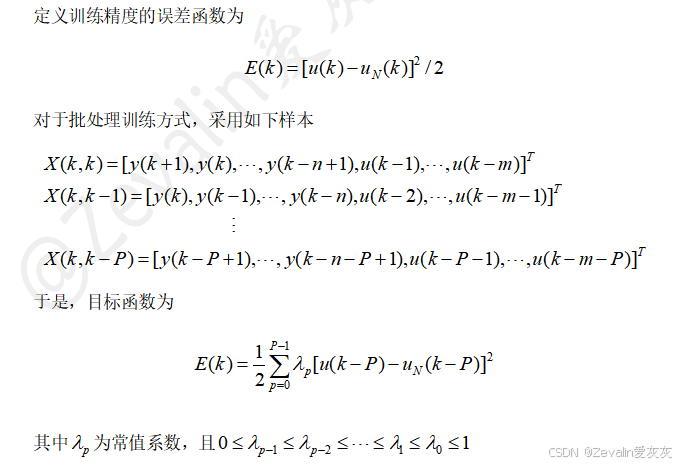
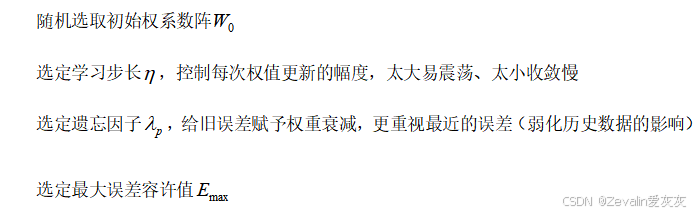
(2)用带遗忘因子的B-P算法训练逆控制器的完整步骤:
①初始化参数:
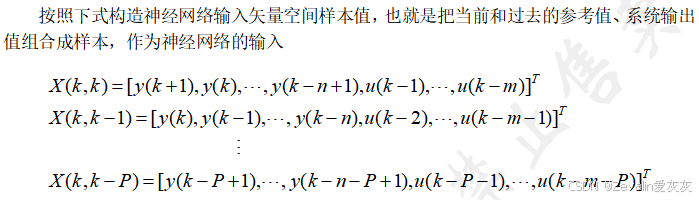
②准备训练样本:
③初始化迭代计数器:

④前向传播,计算网络输出:

⑤判断误差,决定是否停止:

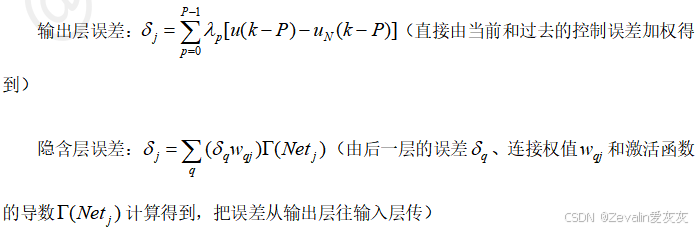
⑥求反向传播误差:
⑦更新权系数:

⑧迭代循环:

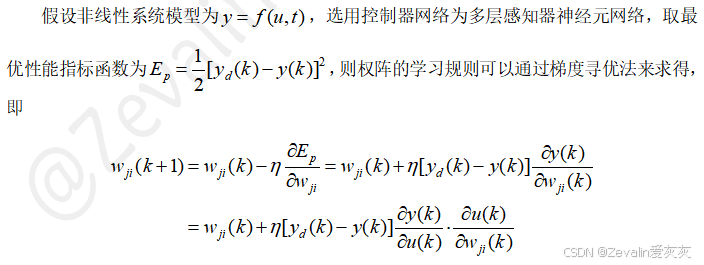
2、直接网络控制设计法
(1)直接逆模型控制法没有考虑到系统本身的输入输出状态,因此,一旦系统运行的环境、参数发生变化时,这类控制器就无法适应了。
(2)基于以上问题,设计改进方案------直接网络控制设计法:

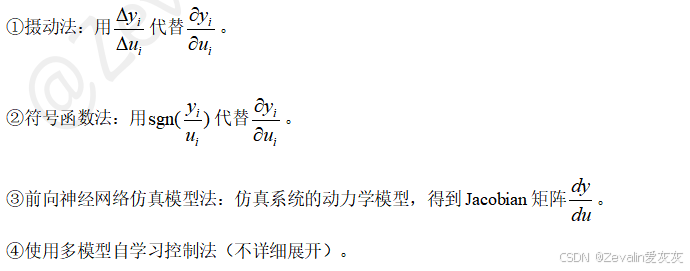
(3)直接网络控制法需要系统的Jacobian矩阵,对此有4种解决措施: