文章目录
- [智慧道路病害分割识别|公路裂缝坑洞智能检测 无人机巡检深度学习数据集](#智慧道路病害分割识别|公路裂缝坑洞智能检测 无人机巡检深度学习数据集)
- [智慧道路 #道路病害检测 #裂缝分割 #坑洼识别 #无人机巡检 #智慧交通 #YOLO实例分割 #路面养护AI #计算机视觉实战](#道路病害检测 #裂缝分割 #坑洼识别 #无人机巡检 #智慧交通 #YOLO实例分割 #路面养护AI #计算机视觉实战)
智慧道路病害分割识别|公路裂缝坑洞智能检测 无人机巡检深度学习数据集
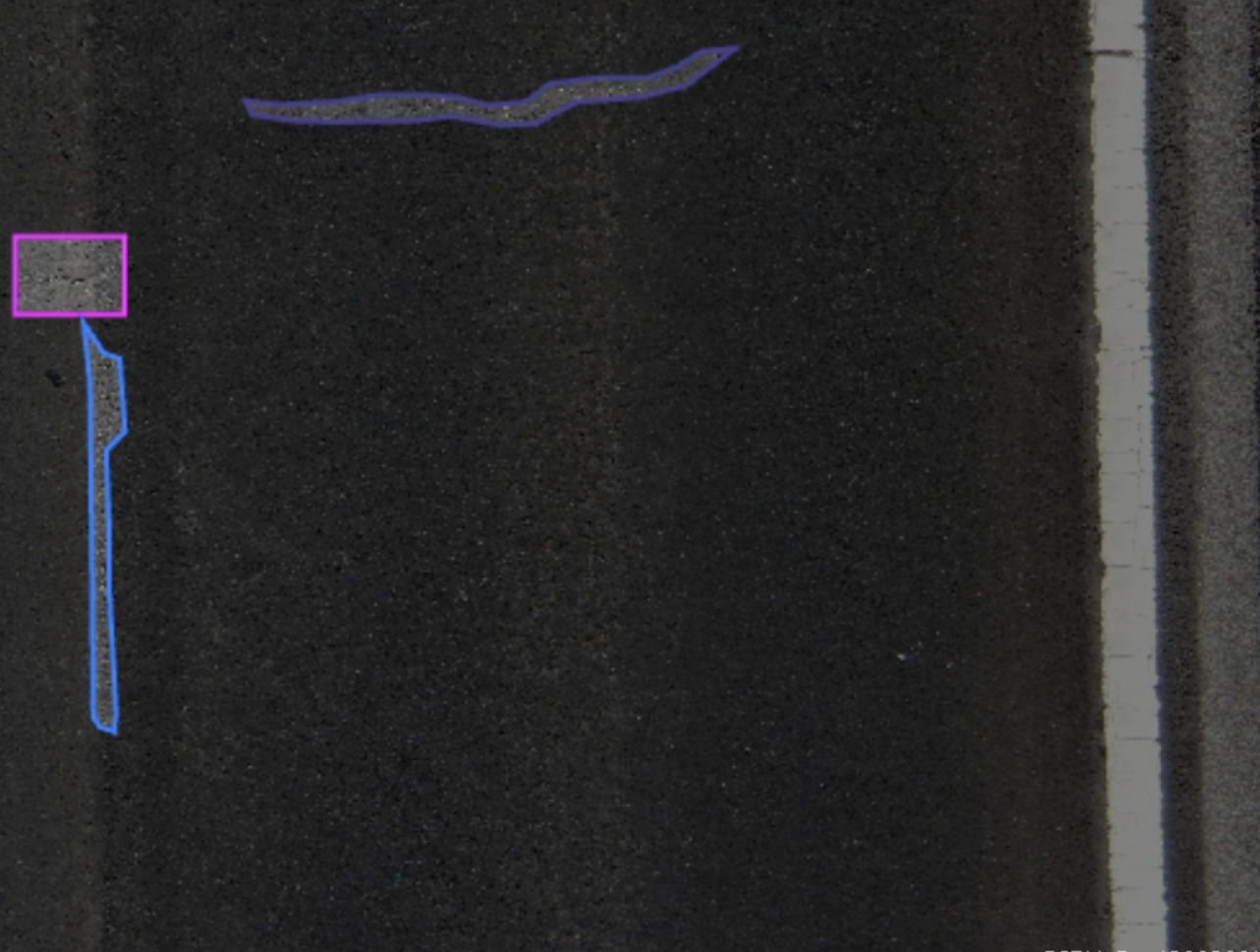
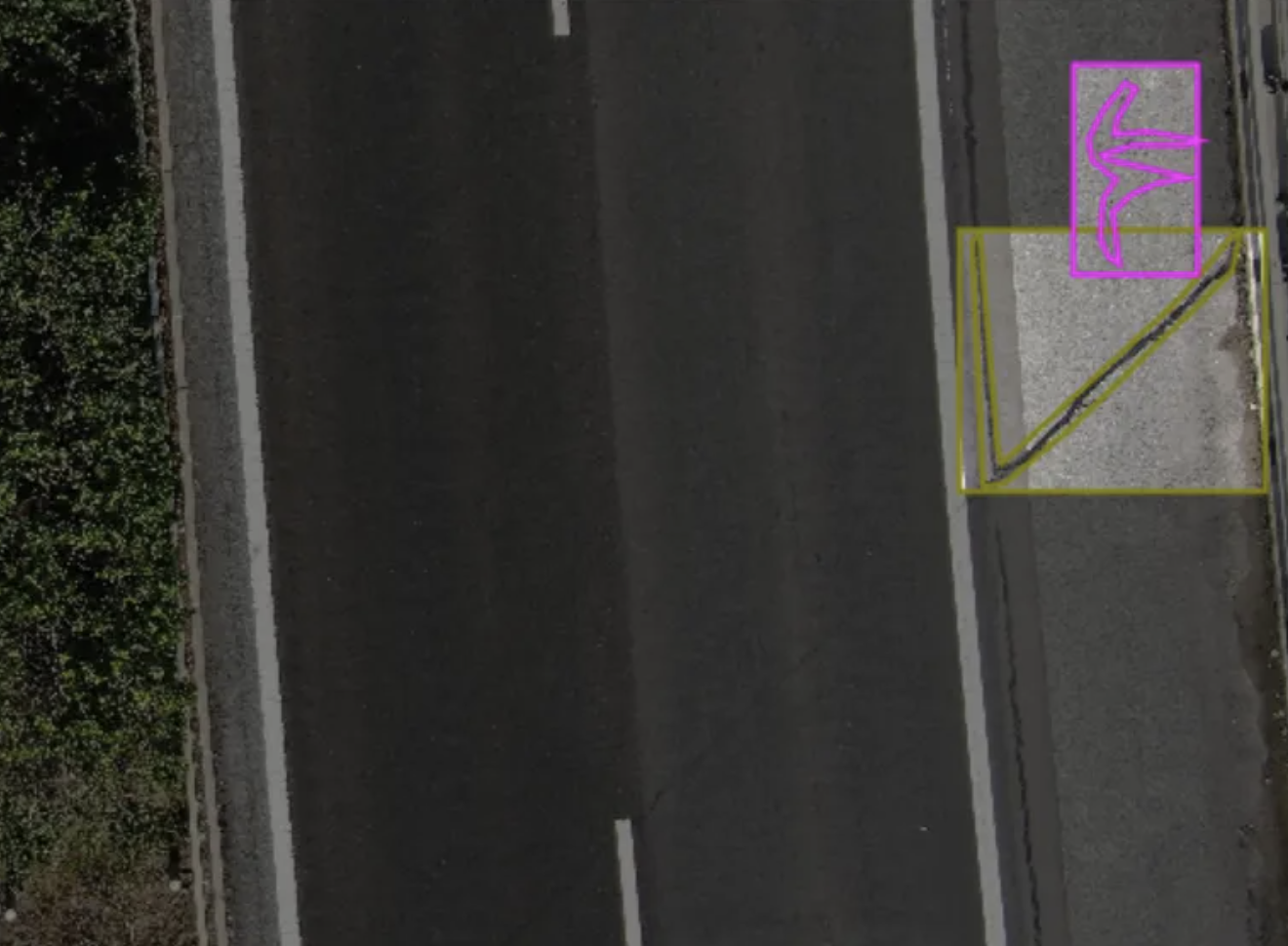
城市路网与高速公路长期服役易出现裂缝、坑洼等结构性损伤,传统人工巡检效率低、覆盖有限、安全风险高。基于实例分割的AI视觉检测,正成为道路养护、智慧交通、基础设施数字化的核心技术。本数据集聚焦真实道路病害场景,提供高质量标注样本与完整YOLO训练流程,可快速落地路面缺陷自动识别系统。

数据集概况
本数据集为道路病害实例分割数据集,覆盖公路/马路/高速/市政道路等多场景,包含多种典型裂缝、坑洼及修复区域,采用标准YOLO格式,适配YOLOv8‑seg等主流分割模型,满足科研与工程落地需求。
核心信息
| 项目 | 详情 |
|---|---|
| 任务类型 | 实例分割(Instance Segmentation) |
| 类别数量 | 7类道路病害与状态 |
| 包含目标 | 鳄鱼纹裂缝、纵向裂缝、新裂缝、斜向裂缝、坑洼、修复区域、横向裂纹 |
| 数据规模 | 2500张高质量标注图像 |
| 数据格式 | YOLO标准格式(图像+掩码标注txt) |
| 适用场景 | 无人机航拍巡检、车载巡检、固定摄像头监测、道路养护平台 |
数据集亮点
- 覆盖全类型典型道路病害,类别贴合工程巡检需求
- 样本量大、场景丰富,有效降低模型过拟合
- 标注精准、格式统一,开箱即用无需二次转换
- 支持实例分割,可精确定位病害轮廓与面积
核心应用价值
- 道路智能养护:自动识别病害类型、位置与程度,生成养护工单
- 无人机自动巡检:高空航拍实时检测,大幅提升巡检效率与覆盖率
- 交通基础设施管理:长期监测病害发展,支撑路网健康评估
- 缺陷评估与决策 :量化损伤面积,辅助维修方案与预算制定

YOLOv8‑seg 训练与推理实战(带场景经验注释)
1. 数据集目录结构
road_damage/
├── images/
│ ├── train/ # 训练集图片
│ └── val/ # 验证集图片
├── labels/
│ ├── train/ # 训练集标注(txt)
│ └── val/ # 验证集标注(txt)
└── road.yaml # 数据集配置2. 数据集配置文件 road.yaml
yaml
# 道路病害实例分割专用配置文件
train: ./images/train
val: ./images/val
# 类别数量
nc: 7
# 类别名称(与标注顺序一致)
names:
- Alligator_crack # 鳄鱼纹裂缝
- Longitudinal_crack # 纵向裂缝
- New_crack # 新裂缝
- Oblique_crack # 斜向裂缝
- Pothole # 坑洼
- Repair # 修复区域
- Transverse_crack # 横向裂纹3. 模型训练代码(道路场景优化参数)
python
from ultralytics import YOLO
def train_road_damage():
# 加载YOLOv8分割预训练模型,道路小目标优先使用s/m型号
model = YOLO("yolov8s-seg.pt")
# 道路病害训练参数(经验值:适合裂缝/坑洼等细长/小目标)
model.train(
data="road.yaml", # 数据集配置
epochs=120, # 训练轮数:道路纹理复杂建议≥100
imgsz=640, # 输入尺寸:提升小目标检出率
batch=8, # 批次大小根据显存调整
device=0, # 使用GPU
lr0=0.01, # 初始学习率(道路场景经验值)
lrf=0.01, # 最终学习率
warmup_epochs=3, # 热身轮数,稳定训练
hsv_h=0.015, # 光照增强,适应户外不同天气
hsv_s=0.7,
hsv_v=0.4,
degrees=10, # 轻微角度增强,适应航拍/车载视角
flipud=0.0, # 道路不使用上下翻转
fliplr=0.5, # 左右翻转增强
patience=15, # 早停策略,防止过拟合
save=True, # 保存最优模型
name="road_damage_seg" # 训练任务名称
)
if __name__ == "__main__":
train_road_damage()4. 推理预测代码(巡检场景实用版)
python
from ultralytics import YOLO
import cv2
def predict_road_damage():
# 加载训练完成的道路病害分割模型
model = YOLO("./runs/segment/road_damage_seg/weights/best.pt")
# 推理:支持图片、视频、RTSP、无人机流
results = model.predict(
source="test.jpg", # 输入:航拍图/车载视频/摄像头
conf=0.25, # 病害目标适当降低置信度
iou=0.45, # 去重阈值
imgsz=640,
save=True, # 保存带掩码的结果图
show=True, # 实时显示结果
line_width=2 # 分割线宽度
)
# 输出病害检测结果
for r in results:
for idx, box in enumerate(r.boxes):
cls_id = int(box.cls)
cls_name = r.names[cls_id]
conf = round(float(box.conf), 2)
print(f"[道路病害检测] 类别:{cls_name} 置信度:{conf}")
if __name__ == "__main__":
predict_road_damage()希望以上信息可以帮助你更好的构建计算机视觉平台,专注致力于目标检测建设