目录
[Sobel 算子边缘检测](#Sobel 算子边缘检测)
[Scharr 算子边缘检测](#Scharr 算子边缘检测)
[Canny 边缘检测](#Canny 边缘检测)
边缘检测是图像处理、目标识别、特征提取的基础操作,核心作用是提取图像中灰度突变的区域,也就是物体轮廓与边界。
在 OpenCV 中,最常用的边缘检测算法主要分为四类:Sobel 算子、Scharr 算子、Laplacian 拉普拉斯算子、Canny 边缘检测。
通用知识点:
数据深度 ddepth图像梯度计算会产生负数(灰度由亮变暗),OpenCV 默认 uint8 类型会直接截断负数,导致边缘丢失。因此代码中统一使用 cv2.CV_64F(64 位浮点型)保存正负梯度。
cv2.convertScaleAbs()将浮点型梯度图像取绝对值 + 映射回 0~255 像素范围,是边缘检测必备后处理。
cv2.addWeighted()图像加权融合,用于合并 X 方向、Y 方向的边缘。
Sobel 算子边缘检测
Sobel 是一阶微分算子 ,分别计算图像 X 方向(水平边缘) 和 Y 方向(垂直边缘) 的梯度,抗噪性较好,是工业场景最常用的基础边缘算法。
dx=1, dy=0:计算水平边缘(检测竖直方向线条)
dx=0, dy=1:计算垂直边缘(检测水平方向线条)
函数
cv2.Sobel(src, ddepth, dx, dy, dst\[, ksize\[, scale\[, delta\[, borderType]]]])
src:输入图像(建议灰度图)ddepth:输出数据深度,推荐cv2.CV_64Fdx:X 方向求导阶数dy:Y 方向求导阶数
python
import cv2
# 读取图像,第二个参数0代表直接读取为灰度图
zl = cv2.imread('mimi.jpg', 0)
# 1. X方向Sobel梯度(水平边缘),使用64位浮点保留负数
zl_x_64 = cv2.Sobel(zl, cv2.CV_64F, dx=1, dy=0)
# 取绝对值,转为正常0~255图像
zl_x_full = cv2.convertScaleAbs(zl_x_64)
# 2. Y方向Sobel梯度(垂直边缘)
zl_y_64 = cv2.Sobel(zl, cv2.CV_64F, dx=0, dy=1)
zl_y_full = cv2.convertScaleAbs(zl_y_64)
# 3. 加权融合X、Y两个方向边缘,得到综合边缘图
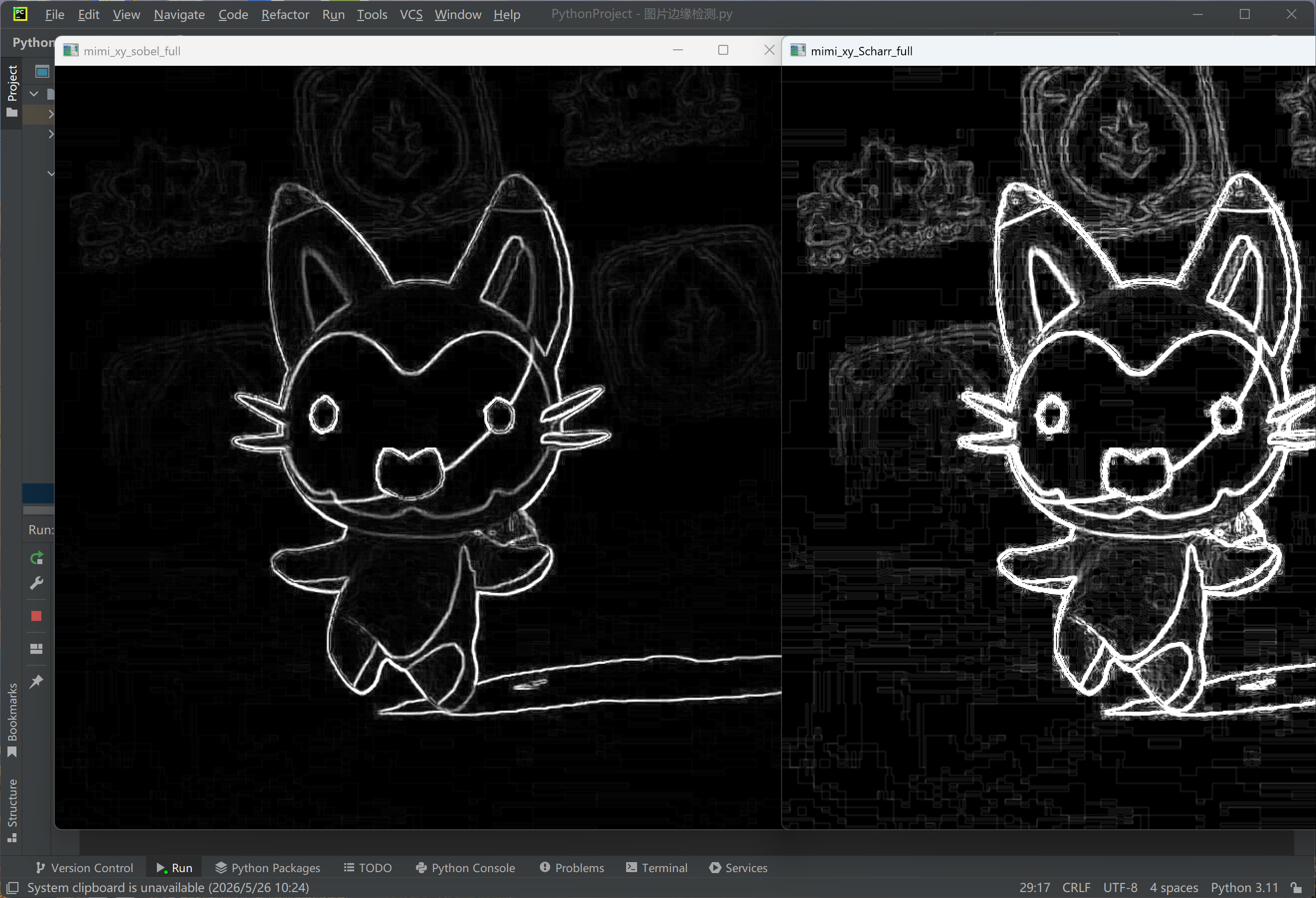
zl_xy_sobel_full = cv2.addWeighted(zl_x_full, 1, zl_y_full, 1, 0)
# 显示结果
cv2.imshow('mimi_xy_sobel_full', zl_xy_sobel_full)
cv2.waitKey(0)
cv2.destroyAllWindows()Scharr 算子边缘检测
Scharr 算子是 Sobel 算子的增强版本 ,卷积核权重更大,边缘检测精度更高,对细弱边缘、细微线条提取能力优于 Sobel,同样属于一阶微分算子。
注意:Scharr 不支持自定义卷积核大小,固定使用 3×3 核。
函数:
cv2.Scharr(src, ddepth, dx, dy, dst\[, scale\[, delta\[, borderType]]])
参数含义与 Sobel 完全一致,使用方式互通。
python
# 读取灰度图像
zl = cv2.imread('mimi.jpg', cv2.IMREAD_GRAYSCALE)
# X方向Scharr边缘
zl_x_64 = cv2.Scharr(zl, cv2.CV_64F, dx=1, dy=0)
zl_x_full = cv2.convertScaleAbs(zl_x_64)
# Y方向Scharr边缘
zl_y_64 = cv2.Scharr(zl, cv2.CV_64F, dx=0, dy=1)
zl_y_full = cv2.convertScaleAbs(zl_y_64)
# 融合双向边缘
zl_xy_Scharr_full = cv2.addWeighted(zl_x_full, 1, zl_y_full, 1, 0)
# 展示Scharr边缘结果
cv2.imshow('mimi_xy_Scharr_full', zl_xy_Scharr_full)
cv2.waitKey(0)
cv2.destroyAllWindows()算法对比
- Sobel:速度快、抗噪强,适合粗边缘提取
- Scharr:精度高、细节丰富,适合精细边缘检测
Laplacian(拉普拉斯)算子边缘检测
Laplacian 是二阶微分算子,直接计算图像二阶导数,无需分 X/Y 方向,可一次性提取全方向边缘。
函数:
cv2.Laplacian(src, ddepth, dst\[, ksize\[, scale\[, delta\[, borderType]]]])
ksize:卷积核尺寸,必须为正奇数 ,示例使用 ksize=3,其余参数与前文一致。
python
# 读取灰度图
zl = cv2.imread('xin_new.jpg', cv2.IMREAD_GRAYSCALE)
# 拉普拉斯二阶求导,3×3卷积核
zl_lap = cv2.Laplacian(zl, cv2.CV_64F, ksize=3)
# 绝对值转换,输出最终边缘图
zl_lap_full = cv2.convertScaleAbs(zl_lap)
cv2.imshow('xin_lap_full', zl_lap_full)
cv2.waitKey(0)
cv2.destroyAllWindows()Canny 边缘检测
Canny 是目前最优秀的综合边缘检测算法 ,内部集成:高斯降噪 → 梯度计算 → 非极大值抑制 → 双阈值筛选,输出单像素、连续、低噪声的标准边缘,也是项目中使用最多的算法。
函数:
cv2.Canny(image, threshold1, threshold2, apertureSize\[, L2gradient])
threshold1:低阈值,低于该值直接判定为非边缘
threshold2:高阈值,高于该值直接判定为强边缘
介于两阈值之间:仅当连接强边缘时,才判定为边缘
python
# 读取灰度图
zl = cv2.imread('xin_new.jpg', cv2.IMREAD_GRAYSCALE)
# 显示原图
cv2.imshow('xin', zl)
cv2.waitKey(0)
# Canny边缘检测:低阈值100,高阈值150
zl_canny = cv2.Canny(zl, threshold1=100, threshold2=150)
cv2.imshow('xin_canny', zl_canny)
cv2.waitKey(0)
cv2.destroyAllWindows()运行展示:
