手术机器人作为现代医疗技术的集大成者,正在重新定义外科手术的精度边界与安全标准。直觉外科达芬奇系统的全球普及证明了机器人辅助手术在微创化、精准化方面的巨大优势。长期以来,高端医疗装备的核心控制技术 ------ 实时操作系统一直被海外厂商垄断,不仅存在供应链安全风险,也难以深度适配国产手术机器人的智能化升级需求。
随着第三代手术机器人向 "AI + 实时控制" 融合方向演进,传统架构已无法同时满足微秒级运动确定性与复杂 AI 推理的双重要求。光亚鸿道自主研发的鸿道 Intewell 工业操作系统,凭借30余年防务领域技术积淀,打造了业界首个 "智算控一体" 架构,成为国内唯一通过医疗仪器 IEC 62304 Class C 功能安全认证的工业操作系统。
本文将深入解析 Intewell 如何通过微内核虚拟化、全局时序确定性与大小脑融合技术,为下一代手术机器人提供微秒级运动控制的坚实底座。
一、手术机器人技术演进与实时性挑战
1、三代手术机器人的控制架构演变
• 第一代(遥操作时代):以 AESOP 系统为代表,采用单核心 RTOS 架构,仅能实现简单的器械递送与定位,控制周期通常在 10ms 级别,运动精度仅为毫米级,缺乏实时视觉反馈能力。
• 第二代(多臂协同时代):达芬奇系统采用分布式控制架构,每个机械臂配备独立的 RTOS 控制器,通过高速总线实现主从同步,控制周期缩短至1ms,运动精度达到亚毫米级。但 AI 视觉处理与运动控制仍需分离部署,存在数据传输延迟与同步误差。
• 第三代(智能融合时代):要求在同一硬件平台上同时运行微秒级运动控制任务与毫秒级 AI 视觉推理任务,传统 "控制板 + AI 加速卡" 的分离式架构不仅增加了系统复杂度与功耗,更难以保证端到端的时序确定性。
2、手术机器人对 RTOS 的极致要求
手术机器人的运动控制是典型的硬实时安全关键系统,任何微小的延迟或抖动都可能引发严重医疗事故。其对操作系统提出了四项核心刚性要求:
• 机械臂伺服与力反馈控制需达到微秒级周期,才能保证操作流畅性与力感知真实性
• 控制指令执行抖动需控制在极小范围,避免机械臂振动影响手术精度
• 紧急停止等关键中断需极速响应,保障意外接触时能立即终止危险动作
• 系统必须通过医疗领域功能安全认证,确保单一故障下仍能维持安全状态
传统通用 RTOS(如 VxWorks)虽能满足基础实时性需求,但在 AI 与控制深度融合、异构算力统一调度及国产自主可控方面存在显著短板。
二、鸿道 Intewell:为医疗安全关键系统服务的实时操作系统
1、微内核虚拟化架构:大小脑融合的技术突破
鸿道 Intewell 采用微内核 + 硬件辅助虚拟化的创新架构,首次实现了 "大脑"(AI 计算)与 "小脑"(运动控制)在单芯片上的融合运行。这一架构完美解决了手术机器人中高实时控制与复杂 AI 计算的资源冲突问题:
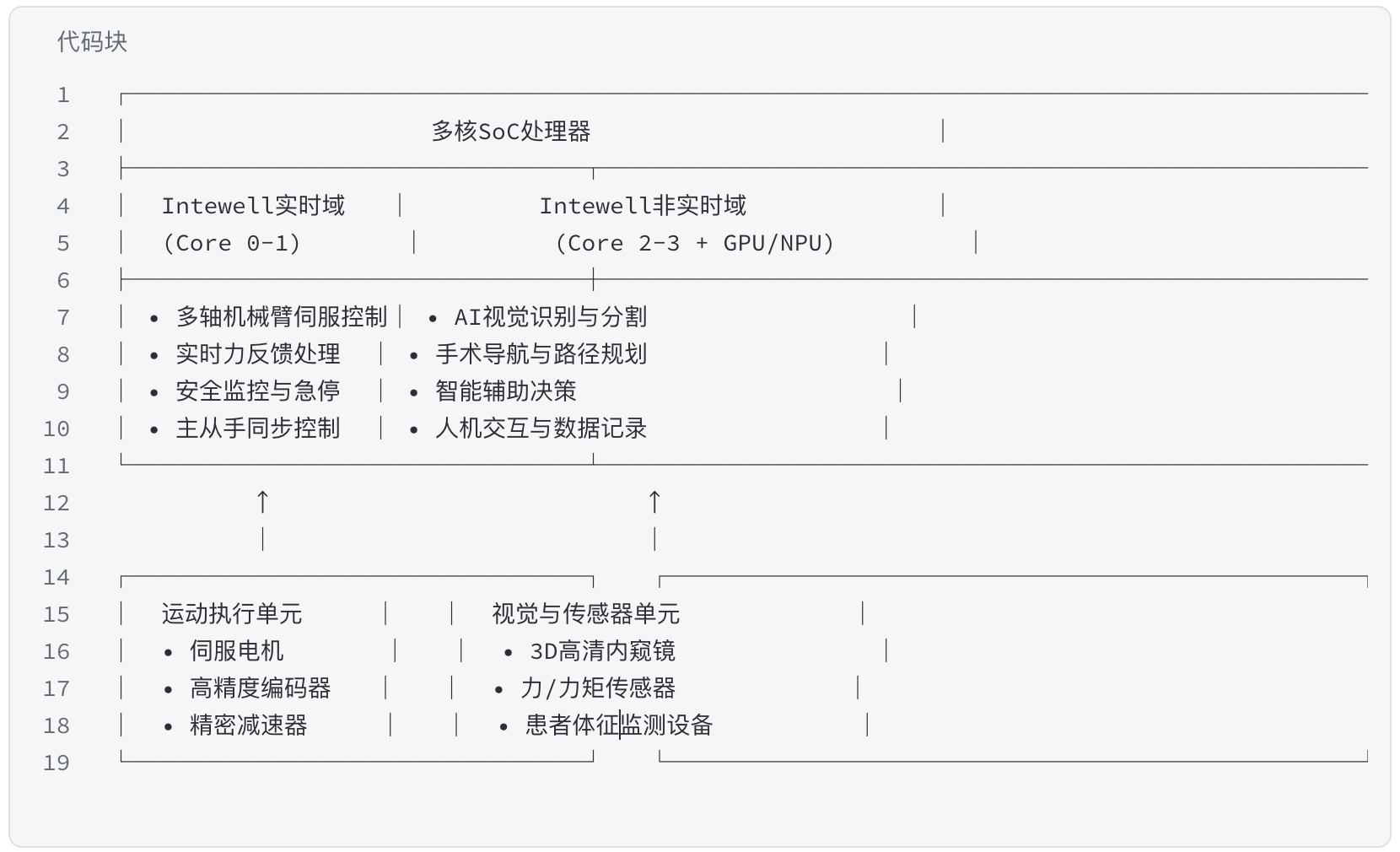
• 物理隔离的双核 / 多核部署:在多核 SoC 上,鸿道Intewell 通过虚拟化技术将 CPU 核心划分为独立的实时域与非实时域。实时域(通常 1-2 个核心)专门运行机械臂运动控制、力反馈处理等硬实时任务,采用静态优先级调度,保证执行时间(WCET)可严格验证;非实时域(剩余核心)运行 AI 视觉推理、人机交互、数据记录等弹性任务,采用动态调度优化资源利用率。
• 核间高速数据交互:通过 鸿道Intewell 内置的虚拟总线技术,实现实时域与非实时域之间的零拷贝数据传输,延,确保 AI 视觉反馈能够以低延迟传递给运动控制算法。
• 资源隔离与保护:虚拟化层提供严格的内存、I/O 与中断隔离,非实时域的任何故障(如 AI 推理崩溃)都不会影响实时域的正常运行,从架构层面保障了系统的功能安全。
2、智算控一体:全局时序确定性的实现
鸿道Intewell 提出的 "智算控一体" 架构,以构建 "全局时序确定性" 为核心目标,实现了从传感器采样、数据传输、AI 推理到运动执行的全环节端到端时序协同:
• 统一时基系统:基于高精度硬件时钟,为所有任务提供纳秒级统一时间戳,确保传感器采样、AI 推理与运动控制指令的严格同步。
• 静态调度表执行:实时域的关键任务严格按照预定义的静态调度表执行,任务切换时间、控制指令抖动等达到国际领先水平。
• 时序感知 AI 调度:在非实时域中,鸿道Intewell 采用时序感知的动态调度算法,将 AI 推理任务划分为多个时间片,在不影响实时任务的前提下AI 计算效率。
• 端到端时序验证:配套的时序分析工具能够对系统的时间行为进行可视化建模与验证,确保在任何负载情况下,关键任务的截止时间都能得到满足。
3、医疗级功能安全:四重认证的安全保障
作为国内唯一同时通过 *汽车(ISO 26262 ASIL-D)、工业控制(IEC 61508 SIL3)、医疗仪器(IEC 62304 Class C)、轨道交通(EN 50128 SIL4)四项高等级功能安全认证的工业操作系统,鸿道Intewell 为手术机器人提供了全方位的安全保障:
• 内核代码 100% 自主可控:通过工信部电子五所测试,内核及关键模块源代码自主率 100%,不存在任何后门或未知漏洞
• 冗余设计支持:支持双处理器冗余与关键任务冗余执行
• 完整的安全开发生命周期:遵循 IEC 62304 标准的开发流程,提供完整的安全文档与认证支持,大幅缩短医疗设备的上市周期
三、基于 鸿道Intewell 的下一代手术机器人系统设计
1、系统整体架构
基于鸿道 Intewell 的下一代手术机器人采用 "单芯片智算控一体" 架构 ,相较于传统分布式架构,硬件成本降低,功耗减少,同时显著提升了系统的集成度与可靠性:
2、微秒级运动控制的实现
Intewell 实时域运行的运动控制算法超短控制周期,这是目前手术机器人领域的标准。在每个控制周期内,系统依次完成以下任务:
1.传感器数据采集:读取电机编码器、力传感器与主手位置数据
2.运动学解算与轨迹规划:根据主手输入计算机械臂各关节的目标位置
3.力反馈控制算法:根据力传感器数据调整运动轨迹,实现柔顺控制
4.伺服控制输出:生成 PWM 信号驱动伺服电机
5.安全状态检查:监控系统状态,触发必要的安全保护
Intewell 的确定性调度机制保证了这些任务的执行时间完全可预测,没有任何随机延迟。
3、AI 视觉与运动控制的微秒级协同
Intewell 的大小脑融合架构实现了 AI 视觉与运动控制的深度协同,解决了传统架构中 "视觉慢、控制快" 的矛盾:
• 视觉 - 控制闭环:AI 视觉系统以 超高速率处理手术图像,识别组织边缘、器械位置与缝合线走向,将结果通过虚拟总线实时传递给运动控制算法。视觉反馈的端到端延迟毫秒级,远低于人类视觉反应时间,完全满足实时控制要求。
• 预测性视觉补偿:Intewell 通过时序预测算法,根据前几帧的视觉数据预测下一时刻的器械位置与组织变形,提前调整运动控制指令,补偿视觉处理延迟。
• 动态算力分配:当手术进行到关键步骤(如血管缝合)时,Intewell 会自动将更多的 GPU/NPU 资源分配给 AI 视觉任务,提高识别精度与帧率;在常规操作步骤时,则降低 AI 算力占用,减少系统功耗。
四、挑战与未来展望
1、当前面临的技术挑战
• 多机器人协同控制:未来手术机器人将向多臂协同方向发展,需要实现多个机械臂之间的纳秒级时钟同步与协同运动控制。鸿道Intewell 正在结合自主研发的AUTBUS 时间敏感网络技术,将通信抖动控制在 20μs 以内,为多机器人协同提供确定性通信保障。
• 大模型在医疗场景的实时部署:随着医疗大模型的发展,未来手术机器人将具备更强的自主决策能力。Intewell 正在优化 AI 推理引擎,支持大模型的轻量化部署与实时推理,同时保证系统的功能安全。
• 临床验证与法规准入:国产手术机器人与实时操作系统的临床验证与法规准入仍面临较高的门槛。需要建立完善的测试标准与验证体系,加快国产医疗装备的上市进程。
2、未来发展方向
• 全栈自主可控的医疗装备生态:以 Intewell 操作系统为核心,构建从芯片、控制器、传感器到整机的全栈自主可控医疗装备生态,彻底摆脱对海外技术的依赖。
• 远程手术:结合 5G 通信技术与 Intewell 的实时控制能力,实现跨地域的远程手术。Intewell 的低延迟与高可靠性能够保证远程手术的安全性与精准性,推动优质医疗资源的下沉。
• 具身智能手术机器人:Intewell 正在开发面向具身智能的机器人操作系统,将大语言模型、计算机视觉与运动控制深度融合,使手术机器人具备自主学习与自主操作能力,能够在医生的监督下完成部分常规手术操作。
五、结论
鸿道 Intewell 工业操作系统凭借其独特的智算控一体架构、微秒级实时确定性与医疗级功能安全认证,为下一代手术机器人提供了坚实的国产技术底座。通过大小脑融合技术,鸿道Intewell 成功解决了 AI 计算与实时控制的融合难题。
未来,随着 鸿道Intewell 技术的不断迭代与完善,我们有理由相信,国产手术机器人将在全球医疗市场占据重要地位,为提高医疗质量、保障患者生命健康做出更大贡献。