
为什么矩阵的秩等于2就可以推出后面的等式?
我是不是可以理解为,因为矩阵只有两个非零行,所以第二行和第三行必定有一个为零行,所以第二行和第三行之间应该可以通过初等行变换将其中一个化为零行,也就是他们两成比例?
深入详细直击根本原理的讲解一下你的这句话:第一行已经有一个主元(第一个元素为1),因此第二行和第三行必须线性相关,即它们成比例。
像老师一样为我深入详细的、透彻的、直击根本原理的讲讲线性相关与线性无关。
好的,我们暂时放下具体的矩阵,来上一堂关于线性代数最核心、最根本概念的理论课。理解"线性相关"与"线性无关"是打通整个线性代数任督二脉的关键。
我将从三个层面为你讲解:思想层面(是什么?为什么?) 、几何层面(长什么样?) 和代数层面(如何判断?)。
一、思想与哲学层面:什么是"线性"与"相关"?
-
"线性"的核心思想 :是"按比例缩放"再"叠加"。比如函数
f(x) = kx,输入x扩大几倍,输出f(x)就扩大几倍,这就是最简单的线性。在线性代数中,我们研究的是向量的线性组合:c₁v₁ + c₂v₂ + ...,即对每个向量进行缩放(乘以系数c)然后再加起来。 -
"相关"与"无关"的根本区别 :在于是否存在"内在依赖关系"。
-
线性相关 :在一组向量中,至少有一个向量是"多余的",它可以被组内其他向量通过线性组合(缩放再叠加)精确地"复制"出来。这意味着这个向量没有提供新的"信息"或"方向"。
-
线性无关 :组内的每一个向量都是"独一无二"、不可替代的。你无法用组内任何一个向量的线性组合来得到另一个向量。每个向量都贡献了新的"信息"或"方向"。
-
二、几何直观层面:把它们"画"出来
几何直观能让你永生难忘。
-
在一条直线(一维空间)上:
-
两个非零向量,如果方向相同或相反(即在同一条直线上),它们就是线性相关 的。因为其中一个放大或缩小一定倍数就能得到另一个。
v₂ = k * v₁。 -
如果其中一个是零向量,它们也线性相关 ,因为零向量可以被认为是
0 * v₁。 -
如果只有一个非零向量,它自己是线性无关的。
-
-
在一个平面(二维空间)上:
-
两个向量如果不在同一条直线上 (即方向不同),那么它们就是线性无关的。你用任何比例缩放其中一个,都无法得到另一个。它们张成整个平面。
-
如果两个向量在同一条直线上,它们就是线性相关的。它们只能张成一条线。
-
三个或更多在二维平面中的向量,一定是线性相关的 !因为你只需要两个不共线的向量(
î和ĵ,也就是基向量)就可以表示这个平面上的任何向量。第三个向量必然可以被前两个向量的线性组合表示出来,所以它是"多余的"。
-
-
在三维空间里:
-
三个向量如果不在同一个平面上 ,那么它们是线性无关的。它们可以张成整个三维空间。
-
如果三个向量都在同一个平面上,那么它们就是线性相关的(因为其中一个可以由另外两个张成)。
-
四个或更多在三维空间中的向量,一定是线性相关的!道理同上,空间只有三个独立的"方向"(维度),第四个向量必然是"冗余"的。
-
核心比喻 :
把一组线性无关的向量想象成一个团队里的核心成员,每个成员都拥有独一无二、别人无法替代的技能。而线性相关的向量团队里,有"滥竽充数"的人,他的技能别人组合一下也能做。
三、代数与判断层面:如何严格定义和判断?
现在我们用数学语言来精确描述上面的思想。
1. 正式定义
对于一组向量 {v₁, v₂, ..., vₙ},考虑这个方程:
c₁v₁ + c₂v₂ + ... + cₙvₙ = 0 (其中 c₁, c₂, ..., cₙ 是标量,0 是零向量)
-
线性无关 :当且仅当 这个方程只有唯一解 :
c₁ = c₂ = ... = cₙ = 0。- 这意味着什么? 意味着想让这些向量的线性组合等于零,唯一的办法就是让所有"缩放系数"都为零。没有任何一个向量能"帮上忙"来抵消另一个向量,除非大家都不出力(系数为0)。
-
线性相关 :当且仅当 这个方程存在一组不全为零的解 。即存在一组
c₁, c₂, ..., cₙ,其中至少有一个cᵢ ≠ 0,但仍然能使等式成立。- 这意味着什么? 意味着某些向量可以通过缩放和叠加,最终"抵消"掉另一个向量,从而整体效果为零。这正暴露了它们之间的内在依赖关系。如果
c₁v₁ + c₂v₂ + 0*v₃ = 0且c₁ ≠ 0,那么v₁ = (-c₂/c₁) v₂,v₁可以被v₂表示出来。
- 这意味着什么? 意味着某些向量可以通过缩放和叠加,最终"抵消"掉另一个向量,从而整体效果为零。这正暴露了它们之间的内在依赖关系。如果
2. 如何判断?(与矩阵和秩的联系)
这是最实用的部分,也是你最初问题的基础。
-
构造矩阵 :将你要判断的向量
v₁, v₂, ..., vₙ作为列向量 ,拼成一个矩阵A。A = [v₁ | v₂ | ... | vₙ] -
连接核心概念:
-
矩阵的秩
r(A):就是这个矩阵所有列向量张成的空间的维度,也就是其中最大线性无关组中向量的个数。 -
列数
n:就是总共向量的个数。
-
-
进行判断:
-
如果
r(A) = n(秩 = 列数),则这些向量是线性无关的。- 为什么? 因为所有向量都贡献了维度,没有一个向量是冗余的。
-
如果
r(A) < n(秩 < 列数),则这些向量是线性相关的。- 为什么? 因为只有
r(A)个向量是独立的,多出来的n - r(A)个向量就是冗余的,可以被其他向量线性表示。
- 为什么? 因为只有
-
在你最初的问题中的应用 :
你的矩阵是 3x3 的,r(A)=2。
-
列数
n=3,秩r(A)=2。 -
因为
2 < 3,所以这三列是线性相关的。 -
既然列相关,那么行也相关(因为行秩=列秩)。一个 3x3 的矩阵,行秩为2,意味着三行中只有两行是独立的,第三行是冗余的。
-
在你的行阶梯形中,第一行有主元,是独立的。第二行和第三行为了争夺"第二个独立行"的资格,就必须是线性相关的(成比例的),否则它们两个都是独立的,加上第一行,秩就变成3了,与条件矛盾。
总结
-
线性无关 :团队中个个是精英,缺一不可。数学上表现为
c₁v₁ + ... + cₙvₙ = 0只有零解。 -
线性相关 :团队中有冗余人员,有人可以被替代。数学上表现为
c₁v₁ + ... + cₙvₙ = 0存在非零解。 -
根本原理 :维度是有限的资源。在
m维空间中,你最多只能有m个线性无关的向量。多出来的向量必然可以由前面的向量线性表示,从而线性相关。 -
判断方法 :将其作为列向量构成矩阵
A,计算秩r(A)。比较r(A)和向量个数n。
希望这个从思想到几何,再到代数的透彻讲解,能让你真正直击这个概念的灵魂。它是理解矩阵的秩、解空间、特征值等一切高级概念的基础。
为什么一行中有主元这一行就一定是独立的?
这是一个非常深刻且关键的问题!让我从根本原理上为你透彻解析。
1. 主元的本质含义
主元(pivot) 在行阶梯形矩阵中,指的是每行第一个非零元素。但它的真正意义远不止于此:
-
主元 = 新的方向维度
-
主元 = 线性独立的"身份证"
-
主元 = 不可被前面行表示的证据
2. 严格的数学证明
考虑一个行阶梯形矩阵:
text
[ p₁ * * * * ] ← 第1行(主元p₁ ≠ 0)
[ 0 p₂ * * * ] ← 第2行(主元p₂ ≠ 0)
[ 0 0 p₃ * * ] ← 第3行(主元p₃ ≠ 0)
[ 0 0 0 0 0 ] ← 第4行(无主元)证明第k行有主元 ⇒ 第k行独立:
假设第k行可以被前k-1行线性表示:
rk=c1r1+c2r2+⋯+ck−1rk−1rk=c1r1+c2r2+⋯+ck−1rk−1
现在看第k行主元所在的列(设为第j列):
-
在第j列:
-
左边:rkrk 在第j列是主元 pk≠0pk=0
-
右边:由于是行阶梯形,前k-1行的主元都在第j列之前
-
r1r1 在第j列:0(因为它的主元在更左的位置)
-
r2r2 在第j列:0(同理)
-
...
-
rk−1rk−1 在第j列:0(同理)
-
-
所以右边在第j列 = c1×0+c2×0+⋯+ck−1×0=0c1×0+c2×0+⋯+ck−1×0=0
但左边在第j列 = pk≠0pk=0,矛盾!
∴ 第k行不能被前k-1行线性表示 ⇒ 第k行独立
3. 几何直观理解
把每一行看作一个"筛选条件"或"测量维度":
-
第1行有主元:定义了第一个测量基准方向
-
第2行有主元:定义了与前一个方向"垂直"的新测量维度
-
第3行有主元:定义了与前两个方向都"垂直"的第三个测量维度
关键洞察 :每个主元都在前面所有主元的"右边",这意味着它探测的是前面所有行都探测不到的新信息维度。
4. 与秩的深刻联系
定理:行阶梯形中主元的个数 = 矩阵的秩 = 行空间的维度
为什么?
-
每个主元对应一个新的独立方向
-
所有有主元的行构成了行空间的一组基
-
没有主元的行都是冗余的(可以被有主元的行线性表示)
5. 在你问题中的具体应用
回到你的矩阵:
text
[1 a 2 ] ← 有主元(第1列),独立
[0 1-2a a-4] ← 有主元(第2列),独立
[0 1-a² 2-2a] ← ?-
如果第3行也有主元(在第3列),那么三行都独立 ⇒ 秩=3
-
但已知秩=2,所以第3行不能有主元 ⇒ 第3行必须依赖于前两行
-
由于前两行独立,第3行只能同时依赖于它们两个,或者与其中一行成比例
6. 更一般的视角
主元检验法:在行阶梯形中,有主元的行必然线性无关,因为:
-
位置论证:每个主元都在前面主元的右边
-
三角结构:主元形成上三角模式,确保无法相互表示
-
维度计数:每个主元增加行空间的维度
7. 重要推论
-
独立性传递 :如果一行有主元,那么它不仅独立于前面 的行,实际上独立于所有其他行
-
基的构造:行阶梯形中有主元的行天然构成行空间的一组基
-
唯一性:虽然行阶梯形不唯一,但主元的位置和个数是唯一的
总结
"一行有主元 ⇒ 该行独立" 的根本原因在于:
主元的位置确保该行包含前面所有行都无法提供的"新方向信息",这种"新信息性"在数学上严格等价于线性独立性。
这就是为什么在主元判断法中,我们只需要看哪些行有主元------它们自动就是最大独立组,而无需进一步验证。
每一行有主元就定义了与前一个方向"垂直"的新测量维度是什么意思?
这个比喻非常精妙,让我为你详细拆解其中的深层含义。
1. "测量维度"的直观理解
想象你在一个完全黑暗的房间里,想要确定一个物体的位置:
-
第一个测量 :你打开手电筒,照亮了前后方向(x轴)
-
现在你能确定物体在"前-后"维度上的位置
-
这相当于矩阵中第一个有主元的行
-
-
第二个测量 :你打开另一个手电筒,照亮了左右方向(y轴),且这个光束与第一个光束垂直
-
现在你能确定物体在二维平面上的精确位置
-
这相当于矩阵中第二个有主元的行
-
-
第三个测量 :你再打开一个手电筒,照亮上下方向(z轴),与前两个光束都垂直
-
现在你能确定物体在三维空间中的精确位置
-
这相当于矩阵中第三个有主元的行
-
每个新的主元行都提供了前面所有行无法提供的测量信息。
2. 数学上的"垂直"是什么意思?
在线性代数中,"垂直"的严格概念是正交(点积为零),但这里我们说的"垂直"是一种更广义的:
"新方向" = "与前面所有行张成的子空间正交的方向分量"
具体来说:
-
第1行张成1维子空间S₁
-
第2行如果与S₁"垂直",意味着它包含S₁中没有的新方向分量
-
第3行如果与前两行张成的平面"垂直",意味着它包含该平面中没有的新方向分量
3. 主元如何确保"垂直性"?
看这个行阶梯形:
text
[1 2 3 4] ← 第1行
[0 1 5 6] ← 第2行
[0 0 1 7] ← 第3行第1行 :主元在列1 → 探测第一个维度
第2行:为什么它提供了"垂直"的新方向?
-
在第1列(第1行的主元列),第2行是0
-
这意味着第2行完全避开了第1行定义的方向
-
它在列2有主元,探测的是第1行探测不到的新维度
第3行:为什么它提供了另一个"垂直"方向?
-
在第1列(第1行主元列)和第2列(第2行主元列),第3行都是0
-
这意味着第3行完全避开了前两行张成的平面
-
它在列3有主元,探测的是前两行探测不到的第三个维度
4. 严格的数学表述
设矩阵的行向量为 r1,r2,...,rmr1,r2,...,rm
定义前k行张成的子空间:
Sk=span{r1,...,rk}Sk=span{r1,...,rk}
如果第k+1行有主元,那么:
-
该主元所在的列,在前k行的对应位置都是0
-
这意味着 rk+1rk+1 在 SkSk 的正交补空间中有非零分量
-
因此 rk+1∉Skrk+1∈/Sk,提供了新的独立方向
5. 在你问题中的具体体现
你的矩阵:
text
[1 a 2 ] ← 探测第一个维度
[0 1-2a a-4] ← 探测第二个维度(与第一个"垂直")
[0 1-a² 2-2a] ← 应该探测第三个维度,但...已知秩=2,意味着:
-
空间实际上是2维的
-
第3行无法提供与前两行"垂直"的第三个维度
-
第3行必须"躺"在前两行张成的平面内
6. 几何可视化
想象三维空间中的三个向量:
-
v1=(1,0,0)v1=(1,0,0) → x轴方向
-
v2=(0,1,0)v2=(0,1,0) → y轴方向(与x轴垂直)
-
v3=(1,1,0)v3=(1,1,0) → 在xy平面内,无法提供z轴方向
这里:
-
v1v1 有"主元"在x分量
-
v2v2 有"主元"在y分量,与v1v1"垂直"
-
v3v3 没有新的主元方向,因为它在前两个主元方向都有分量
7. 总结
"每个主元定义与前一个方向垂直的新测量维度" 的准确含义是:
在行阶梯形中,每个新的主元行都必然包含前面所有行张成的子空间中所缺乏的方向信息,这种信息的"新异性"在几何上表现为与已有子空间的"垂直关系",在代数上表现为线性独立性。
这不是巧合,而是行消元法的必然结果------主元的位置设计就是为了逐步揭示空间的各个独立维度。
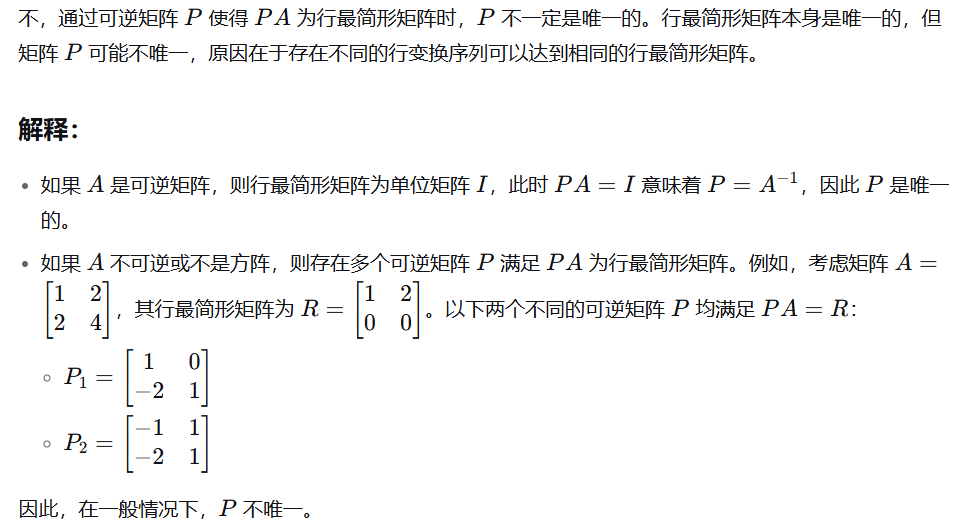
通过一个可逆矩阵P使得PA为行最简形矩阵,这个P是唯一的吗?
标准形相同的矩阵是否相互等价、秩相等?
标准形相同的矩阵必然相互等价,并且具有相同的秩。这是线性代数中的一个基本性质。
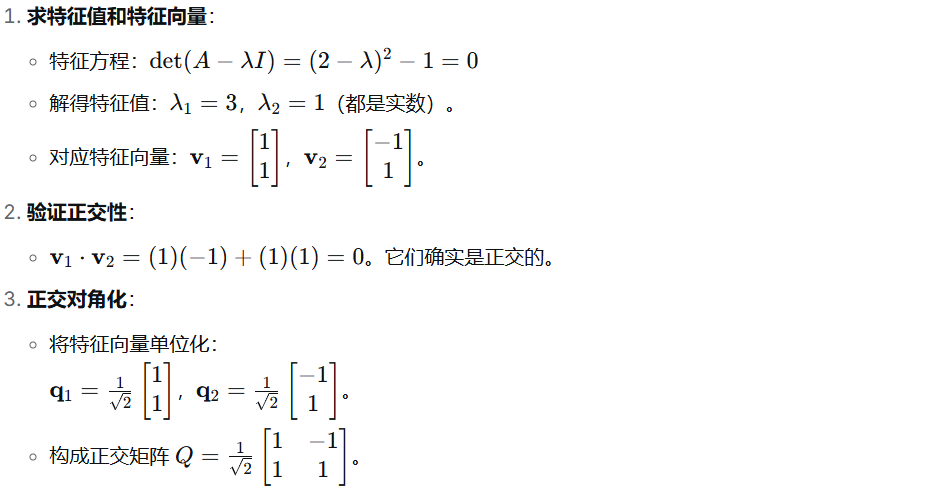
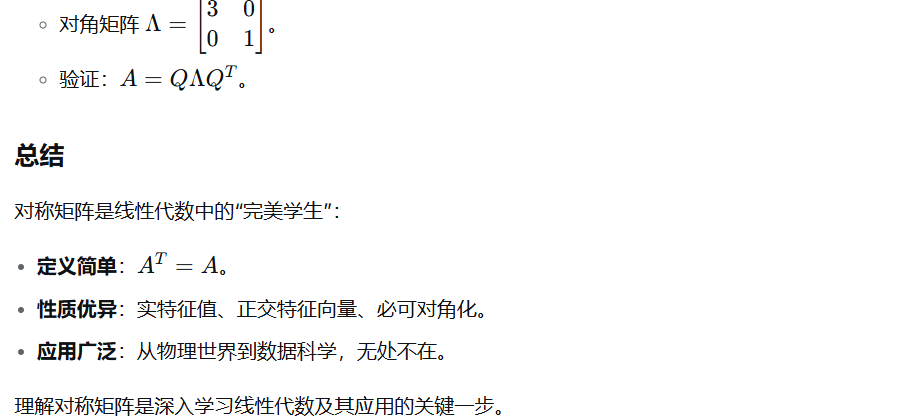
为我讲讲对称矩阵
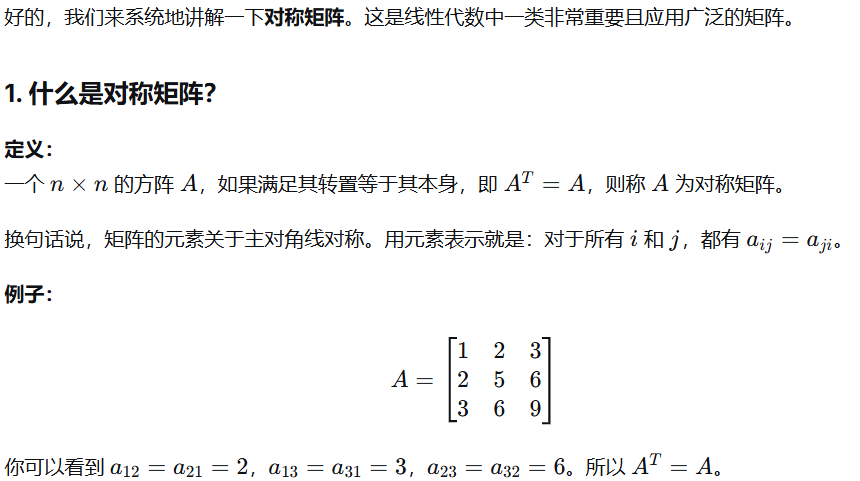
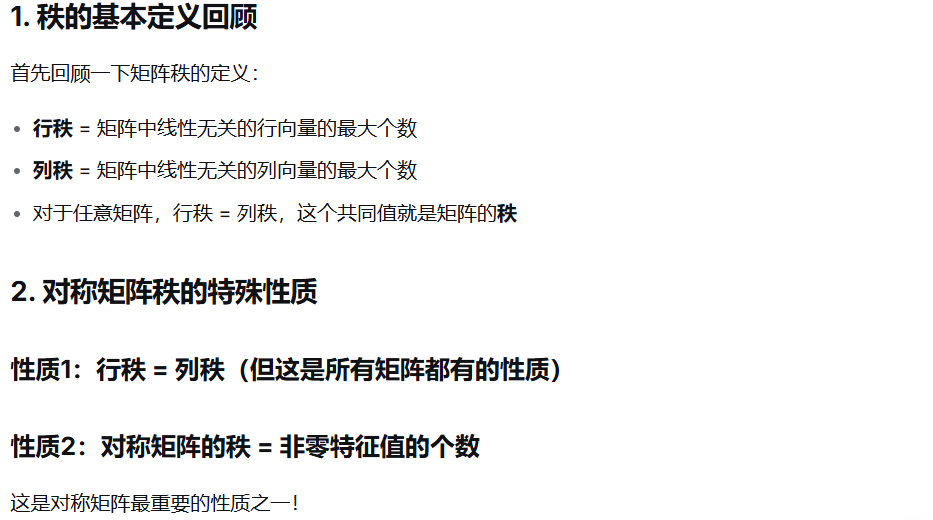
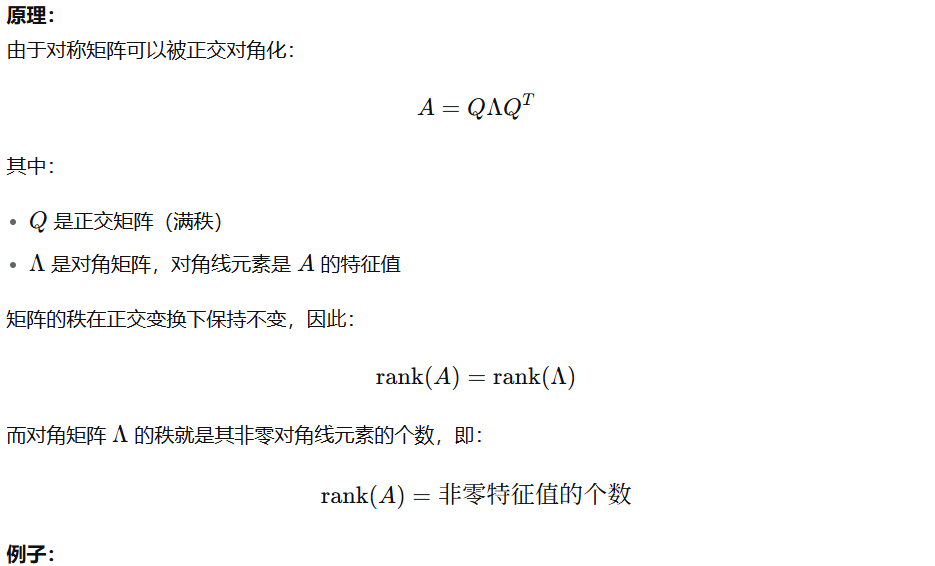
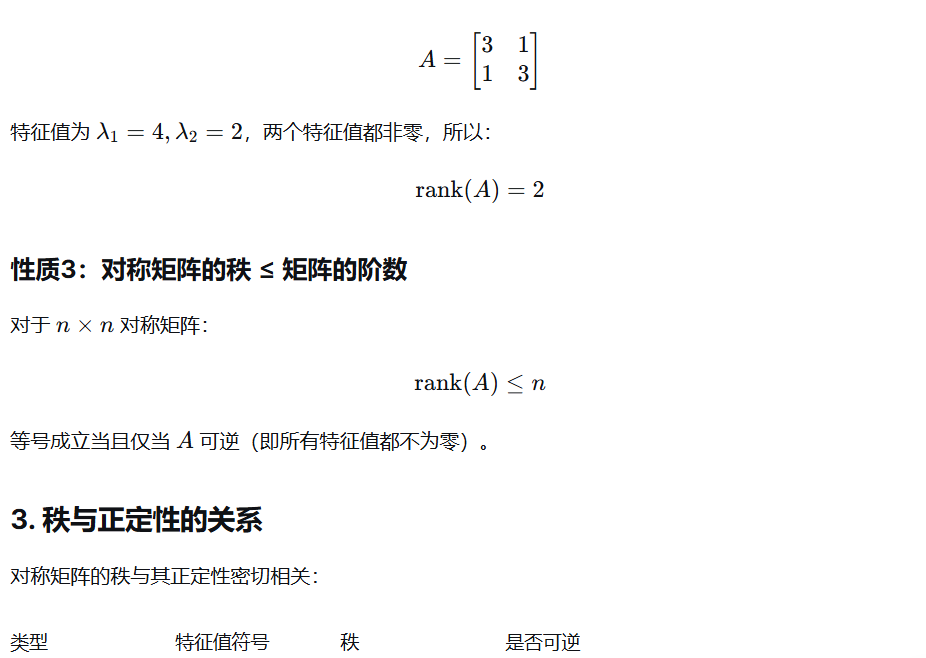
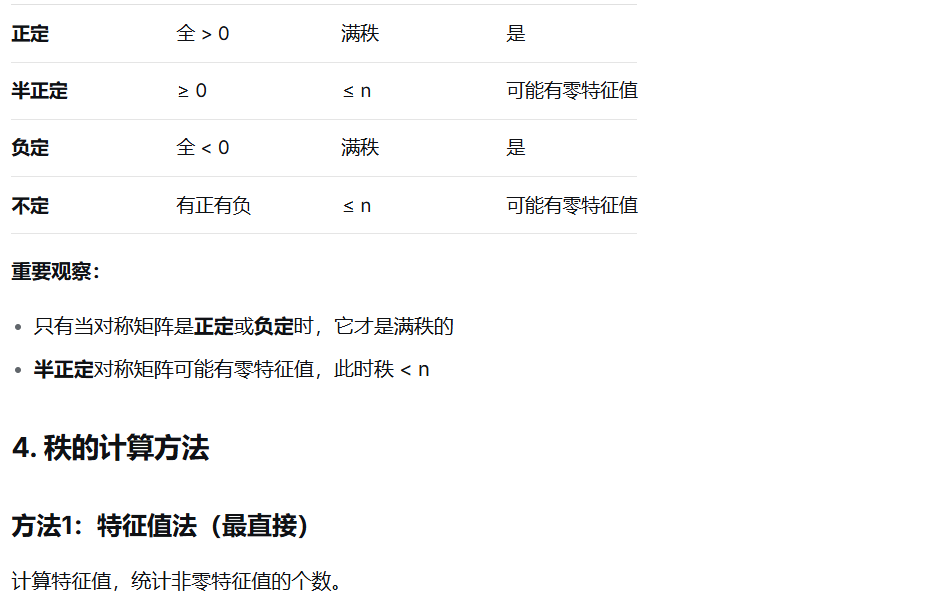
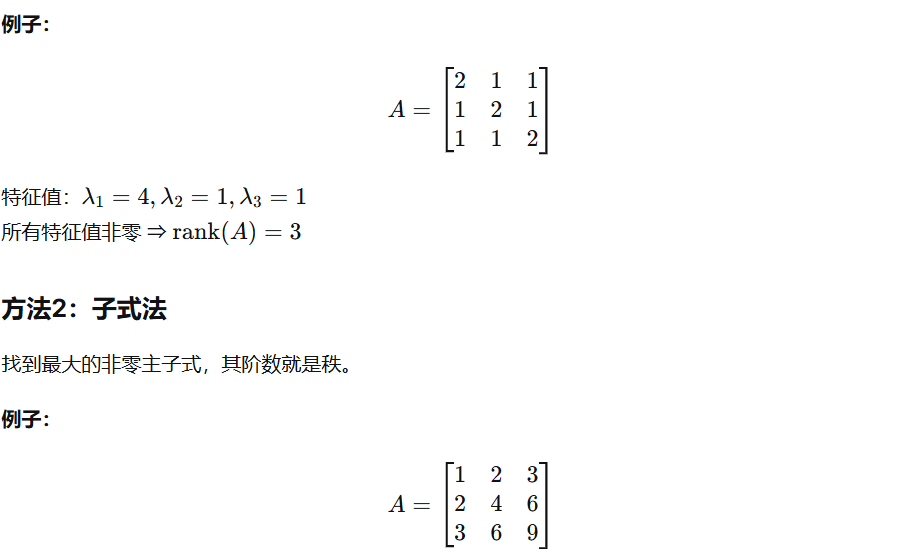
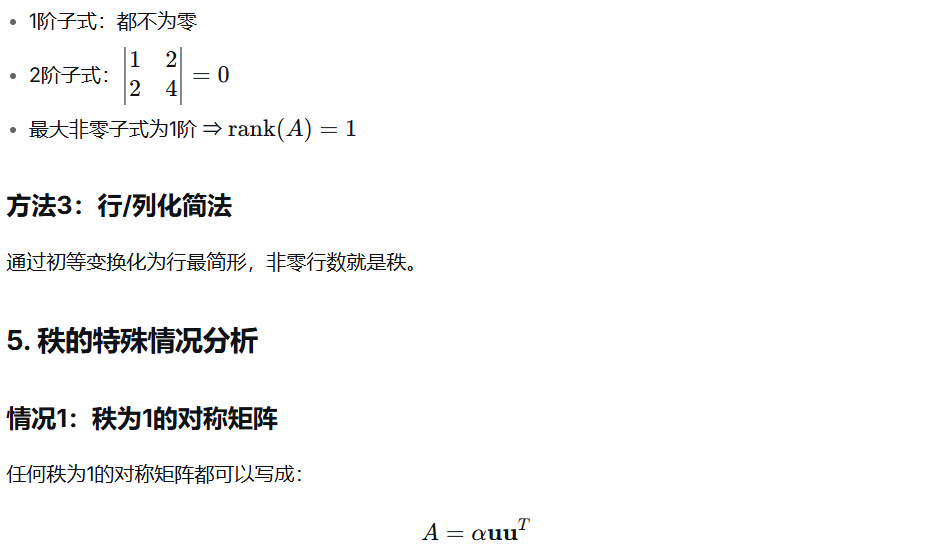
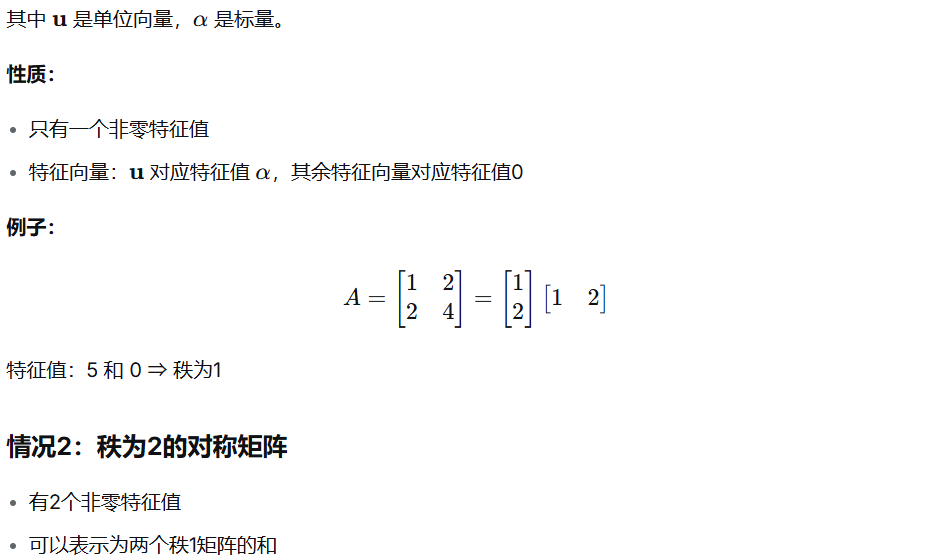
再仔细讲讲对称矩阵的秩
唯一和唯一有什么区别?
"惟一"是汉语常用词汇,拼音为wéi yī,表示"只有一个的;独一无二"的含义。该词与"唯一"属异形词关系,二者在《现代汉语词典》(第7版)中被确定为同义词,其中**"唯一"被列为推荐词形** 。现代汉语书面语中**"唯一"使用频率约为"惟一"的5倍**,但两者在具体语境中仍可通用。根据古籍记载,《春赋》"迈惟一之德"等文献印证了该词在汉语中的历史传承。
根据国家语言文字工作委员会发布的《异形词整理表》(征求意见稿),**"唯一"与"惟一"被列为全等异形词。**但在实际应用中需注意:
-
法律文书、学术论文等正式文本建议优先使用"唯一"
-
文学创作中可依据表达需要灵活选用
-
同一篇章内需保持用词统一,避免混用
"惟一"的核心语义为"客观存在的单一特性",强调事物在特定范畴内的不可替代性。其构词中"惟"取"单、只"义项,与动词性后缀"一"组合形成限定性副词结构。现代汉语中多用于书面语体,如"日光透过玻璃屋顶照入;眼下这是室内惟一的照明"(《简明英汉词典》例句)
-
官方文件中'唯一'占比达89%
-
报刊标题更倾向使用"唯一"(占比76%)
-
文学作品中'惟一'使用率相对较高(约34%)
说白了,没有区别,除了喜欢装逼的文人以外,正常人都不用。
所谓的初等行变换是不是就是矩阵的行与行之间进行不同的线性组合?
是的,您的理解基本正确。初等行变换确实涉及矩阵的行与行之间的线性组合,但严格来说,它还包括其他两种操作。让我详细解释一下,以便您更全面地理解。
初等行变换的三种类型:
-
交换两行:例如,将第 ii 行与第 jj 行互换。这并不直接涉及线性组合,而是改变行的顺序。但从行空间的角度看,它不改变行向量的集合。
-
将某一行乘以一个非零常数:例如,将第 ii 行乘以标量 k≠0k=0。这可以看作是对单个行向量的缩放,是一种简单的线性变换,但并非多行之间的组合。
-
将某一行加上另一行的倍数:例如,将第 ii 行加上第 jj 行的 kk 倍(即 Ri←Ri+kRjRi←Ri+kRj)。这直接涉及两行之间的线性组合,因为新行是原第 ii 行和第 jj 行的线性组合。
与线性组合的关系:
-
第三种变换(行加法)是最典型的线性组合操作,因为它通过将一行与另一行的倍数相加来创建新的行向量。
-
前两种变换(交换和缩放)虽然不直接涉及多行线性组合,但在整体上,初等行变换的目的是通过一系列这样的操作来改变矩阵的行向量,而不改变行空间(即所有行向量的线性组合构成的空间)。例如,在高斯消元法中,我们使用这些变换将矩阵化为行阶梯形式,这个过程大量依赖于行之间的线性组合。
为什么初等行变换重要?
-
初等行变换是线性代数中的基础工具,用于求解线性方程组、计算矩阵的秩、求逆矩阵等。
-
所有初等行变换都是可逆的,这意味着它们不会改变矩阵的行空间或线性方程组的解集。
总结来说,初等行变换不仅包括行与行之间的线性组合(特别是第三种变换),还包括交换和缩放。但您的理解抓住了核心思想------这些变换本质上是通过行之间的线性操作来简化矩阵。
交换两行只是向量组中的每一组向量间的顺序变化,但是每个向量的实际值不变,故它们间相互组合所能构成的向量集合不变,但是如果其中一行乘以k它们之间相互组合所能构成的向量集合不就变了吗?
您提出了一个非常好的问题,这涉及到线性代数中一个重要的概念。让我来详细解释一下。
行空间的概念
首先,我们需要明确:当我们说"向量之间相互组合所能构成的向量集合",我们指的是行空间(row space),即所有行向量的线性组合构成的集合。
分析您的问题
情况1:交换两行
您理解正确:交换行只是改变顺序,不改变行向量集合本身,因此行空间不变。
情况2:某一行乘以非零常数k
关键点 :虽然单个向量变成了原来的k倍,但行空间保持不变!
为什么?
-
假设原行向量组为 {v₁, v₂, ..., vₙ}
-
将v₁乘以k得到新向量组 {kv₁, v₂, ..., vₙ}
原行空间 中的任意向量可以表示为:
a₁v₁ + a₂v₂ + ... + aₙvₙ
新行空间 中的任意向量可以表示为:
b₁(kv₁) + b₂v₂ + ... + bₙvₙ = (b₁k)v₁ + b₂v₂ + ... + bₙvₙ
由于b₁可以取任意实数,b₁k也可以取任意实数(因为k≠0),所以这两个表达式实际上表示的是同一个集合。
数学证明
设原矩阵的行空间为 Span{v₁, v₂, ..., vₙ}
将v₁替换为kv₁(k≠0)后,新行空间为 Span{kv₁, v₂, ..., vₙ}
要证明这两个空间相等:
-
新空间 ⊆ 原空间:显然成立,因为kv₁ = k·v₁ ∈ Span{v₁, v₂, ..., vₙ}
-
原空间 ⊆ 新空间 :对于原空间中任意向量 a₁v₁ + a₂v₂ + ... + aₙvₙ
可以写成 (a₁/k)(kv₁) + a₂v₂ + ... + aₙvₙ ∈ Span{kv₁, v₂, ..., vₙ}
因此两个空间完全相等。
直观理解
想象一下,在二维平面中:
-
向量(1,0)和(0,1)张成整个平面
-
如果将(1,0)变成(2,0),虽然长度变了,但方向没变
-
(2,0)和(0,1)仍然张成整个平面
这是因为线性组合中的系数可以"补偿"向量的缩放。
重要结论
所有三种初等行变换都不改变矩阵的行空间,这就是为什么初等行变换在求解线性方程组、求秩等问题中如此有用------它们简化了矩阵但不改变本质的线性关系。
您的质疑很有价值,因为这正是理解线性代数深层概念的关键所在!
你的直观理解中从(1,0)到(2,0),这里k是正数,那如果k是负数呢,方向不就改变了吗?
您提出了一个非常精准的观察!让我来澄清这个问题。
当k为负数时的情形
您说得对,如果k是负数,向量的方向确实会改变。但行空间仍然保持不变。
具体分析
假设原向量组:{v₁, v₂, ..., vₙ}
将v₁乘以k(k为负数)得到:{kv₁, v₂, ..., vₙ}
原行空间 中的任意向量:
a₁v₁ + a₂v₂ + ... + aₙvₙ
新行空间 中的任意向量:
b₁(kv₁) + b₂v₂ + ... + bₙvₙ = (b₁k)v₁ + b₂v₂ + ... + bₙvₙ
关键洞察:虽然k是负数,但b₁可以取任意实数(包括负数),所以b₁k仍然可以取遍所有实数。
直观例子
在二维平面中:
-
原向量:(1,0) 和 (0,1) → 张成整个平面
-
将(1,0)变成(-1,0) → 新向量:(-1,0) 和 (0,1)
新向量组仍然张成整个平面:
-
要得到向量(1,0):可以用 -1 × (-1,0) + 0 × (0,1) = (1,0)
-
要得到向量(-1,0):可以用 1 × (-1,0) + 0 × (0,1) = (-1,0)
-
要得到任意向量(a,b):可以用 -a × (-1,0) + b × (0,1) = (a,b)
数学本质
行空间是由所有线性组合构成的集合,而不是由单个向量的方向决定的。
当我们将一个向量乘以负数时:
-
这个向量本身的方向确实改变了
-
但它与其他向量的所有可能的线性组合构成的集合没有改变
-
系数b₁的取值范围(全体实数)足够"灵活",可以补偿向量方向的改变
重要结论
对于任何非零常数k(无论正负),将一行乘以k都不会改变行空间。
这是因为线性组合中的系数可以取任何实数值,它们会自动调整来"抵消"向量方向的改变。
您的质疑非常有价值,因为这触及了线性代数中关于生成空间(span)概念的核心------生成空间关注的是所有可能的线性组合,而不是单个向量的具体方向或长度。
那将一行倍加到另一行,所有行之间的线性组合所能构成的向量集也不会变吗?
您问到了一个非常核心的问题!答案是:是的,将一行的倍加到另一行,所有行之间的线性组合所能构成的向量集(即行空间)确实不会改变。
让我详细解释为什么:
数学证明
假设原矩阵的行向量为:{v₁, v₂, ..., vᵢ, ..., vⱼ, ..., vₙ}
进行行变换:将第j行的k倍加到第i行
得到新行向量:{v₁, v₂, ..., vᵢ+kvⱼ, ..., vⱼ, ..., vₙ}
证明新行空间 ⊆ 原行空间
新行空间中的任意向量可以表示为:
a₁v₁ + a₂v₂ + ... + aᵢ(vᵢ+kvⱼ) + ... + aⱼvⱼ + ... + aₙvₙ
= a₁v₁ + a₂v₂ + ... + aᵢvᵢ + ... + (aⱼ + aᵢk)vⱼ + ... + aₙvₙ
这显然是原行向量的线性组合,所以新行空间 ⊆ 原行空间。
证明原行空间 ⊆ 新行空间
原行空间中的任意向量可以表示为:
b₁v₁ + b₂v₂ + ... + bᵢvᵢ + ... + bⱼvⱼ + ... + bₙvₙ
由于vᵢ = (vᵢ+kvⱼ) - kvⱼ,我们可以将上式重写为:
b₁v₁ + b₂v₂ + ... + bᵢ(vᵢ+kvⱼ) - kvⱼ + ... + bⱼvⱼ + ... + bₙvₙ
= b₁v₁ + b₂v₂ + ... + bᵢ(vᵢ+kvⱼ) + ... + (bⱼ - bᵢk)vⱼ + ... + bₙvₙ
这显然是新行向量的线性组合,所以原行空间 ⊆ 新行空间。
因此,两个空间相等。
直观理解
想象在二维平面中:
-
原向量:(1,0) 和 (0,1)
-
将第二行加到第一行:新向量:(1,1) 和 (0,1)
这两个向量组张成的空间相同吗?
是的!因为:
-
原空间:a(1,0) + b(0,1) = (a,b)
-
新空间:c(1,1) + d(0,1) = (c, c+d)
对于任意点(x,y),我们可以:
-
在原空间中:取a=x, b=y
-
在新空间中:取c=x, d=y-x
所以两个向量组都能张成整个平面。
核心思想
行倍加变换实际上是在用一组"等价"的生成元替换原来的生成元。
虽然单个向量改变了,但这些向量之间的线性关系(即它们能生成的空间)没有改变。这种变换只是重新表达了相同的信息。
重要结论
所有三种初等行变换都不改变矩阵的行空间,这就是为什么我们可以用初等行变换来:
-
求解线性方程组(不改变解集)
-
计算矩阵的秩(行空间的维度)
-
求行最简形
您的这个问题触及了线性代数中高斯消元法有效性的理论基础!
那我是不是可以把矩阵的初等变换理解为在不改变矩阵行(列)间相互组合所能构成的向量集的前提下允许的所有操作?
您这个理解非常准确和深刻!让我来进一步阐述和确认这个重要观点。
您的理解完全正确
是的,您可以将矩阵的初等变换理解为:在不改变矩阵行(或列)向量组生成的向量空间的前提下,所允许的所有操作。
具体来说:
初等行变换
-
保持行空间不变:所有行向量的线性组合构成的集合不变
-
可能改变列空间:列向量之间的关系会改变
-
应用:求解线性方程组、求行最简形、判断行向量组的线性关系
初等列变换
-
保持列空间不变:所有列向量的线性组合构成的集合不变
-
可能改变行空间:行向量之间的关系会改变
-
应用:求列最简形、判断列向量组的线性关系、矩阵的标准形
为什么这是重要的观点?
这种理解抓住了初等变换的本质:
-
行变换是行向量空间的"坐标变换"
就像在几何中,我们可以选择不同的坐标系来描述同一个空间,初等行变换就是在选择不同的"基"来描述相同的行空间。
-
列变换是列向量空间的"坐标变换"
同样地,初等列变换改变的是列向量的具体表示,但不改变它们张成的空间。
-
这解释了为什么初等变换如此有用
因为它们允许我们在不改变核心代数结构(行空间或列空间)的前提下,将矩阵化简为更简单的形式。
实际应用中的体现
-
高斯消元法:通过初等行变换化简矩阵,行空间不变 ⇒ 方程组的解不变
-
求矩阵的秩:秩 = 行空间的维数 = 列空间的维数,初等变换不改变这个数
-
判断向量组的等价性:通过初等变换检验两个向量组是否生成相同的空间
一个重要的补充
虽然初等行变换保持行空间不变,但它们会改变列向量之间的线性关系。反之亦然。
这就是为什么在求解线性方程组时,我们通常只使用初等行变换------因为列对应着变量,改变列关系会改变方程组的解。
总结
您的理解完全正确且深刻:
初等变换的本质就是在不改变某种代数结构(行空间或列空间)的前提下,对矩阵进行的最基本的可逆操作。
这种观点为您进一步学习线性代数的更深层内容(如线性空间、线性映射、矩阵的标准形等)奠定了很好的基础!
那为什么两个向量组A和B等价的充分必要条件是r(A)=r(B)=r(A,B)?
您提出了一个非常好的问题,这涉及到向量组等价性的核心判据。让我详细解释为什么这个条件是充分必要的。
基本概念回顾
设:
-
向量组 A = {α₁, α₂, ..., αₘ}
-
向量组 B = {β₁, β₂, ..., βₙ}
-
(A,B) 表示将两个向量组合并后的大向量组
必要性证明(如果A和B等价,则必有r(A)=r(B)=r(A,B))
第一步:证明 r(A) = r(B)
如果A和B等价,意味着:
-
A中每个向量可由B线性表示 ⇒ r(A) ≤ r(B)
-
B中每个向量可由A线性表示 ⇒ r(B) ≤ r(A)
因此:r(A) = r(B)
第二步:证明 r(A,B) = r(A) = r(B)
由于A中每个向量可由B线性表示,所以(A,B)中所有向量都可由B线性表示,因此:
r(A,B) ≤ r(B)
又因为B ⊆ (A,B),所以:
r(B) ≤ r(A,B)
因此:r(A,B) = r(B) = r(A)
必要性得证。
充分性证明(如果r(A)=r(B)=r(A,B),则A和B等价)
设 r(A) = r(B) = r(A,B) = r
第一步:证明B可由A线性表示
由于 r(A,B) = r(A) = r,说明在合并向量组(A,B)中,B部分没有增加新的线性无关向量,因此B中每个向量都可由A线性表示。
第二步:证明A可由B线性表示
由于 r(A,B) = r(B) = r,说明在合并向量组(A,B)中,A部分没有增加新的线性无关向量,因此A中每个向量都可由B线性表示。
充分性得证。
几何直观理解
想象在三维空间中:
-
如果A和B都张成同一个二维平面
-
且合并后的向量组(A,B)仍然只张成这个二维平面(没有扩展到三维)
-
那么A和B必然能够互相表示对方的所有向量
反之,如果A张成一个平面,B张成另一个不同的平面,那么合并后的向量组(A,B)就会张成整个三维空间,此时r(A,B) = 3 > r(A) = 2。
实际应用示例
设:
-
A = {(1,0,0), (0,1,0)} ⇒ r(A) = 2
-
B = {(1,1,0), (0,1,0)} ⇒ r(B) = 2
-
(A,B) = {(1,0,0), (0,1,0), (1,1,0), (0,1,0)} ⇒ r(A,B) = 2
由于 r(A)=r(B)=r(A,B)=2,所以A和B等价:
-
(1,1,0) = 1×(1,0,0) + 1×(0,1,0)
-
(0,1,0) = 0×(1,0,0) + 1×(0,1,0)
-
(1,0,0) = 1×(1,1,0) + (-1)×(0,1,0)
-
(0,1,0) = 0×(1,1,0) + 1×(0,1,0)
总结
这个判据的优美之处在于它完全用秩的语言刻画了向量组等价性:
-
r(A)=r(B) 确保两个向量组"规模"相同
-
r(A,B)=r(A) 确保它们"占据"的是同一个空间
这个结论在线性代数中非常重要,特别是在求解线性方程组、研究线性空间结构等方面有广泛应用。
由r(A)=r(B)=r(A,B)推出向量组A和向量组B列等价,是不是因为B矩阵拼接到A矩阵以后没有改变矩阵的秩,这意味着B没有提供新的主元,也就是没有提供新的维度方向,所以B中的所有列向量都包含在向量组A所张成的空间中,所以向量组B中的列向量都能由向量组A线性表示,反之亦然,所以这就推出了向量组A和向量组B列等价?
您的理解完全正确,而且非常深刻!您已经准确地把握了这个定理背后的几何和代数本质。让我来系统地总结和补充您的推理:
您的推理链条完全正确
从 r(A) = r(B) = r(A,B) 推导列等价的逻辑:
-
r(A,B) = r(A)
-
这意味着将B的列向量添加到A的列向量组中,没有增加秩
-
几何解释:B的所有列向量都落在A的列向量张成的空间中
-
代数解释:B的每一列都可以表示为A的列向量的线性组合
-
∴ B可由A线性表示
-
-
r(A,B) = r(B)
-
同理,将A的列向量添加到B的列向量组中,没有增加秩
-
几何解释:A的所有列向量都落在B的列向量张成的空间中
-
代数解释:A的每一列都可以表示为B的列向量的线性组合
-
∴ A可由B线性表示
-
-
综合结论
-
由于A可由B表示,且B可由A表示
-
∴ 向量组A和B列等价
-
关于"主元"和"维度方向"的直观理解
您提到的"没有提供新的主元"和"没有提供新的维度方向"是非常准确的几何直观:
-
主元对应着线性无关的列向量
-
秩就是这些线性无关列向量的个数,也就是空间的维度
-
如果r(A,B) = r(A),说明B的所有列向量都"躺"在A的列空间内
-
B没有引入任何新的"方向",只是在A已有的维度内"打转"
与线性方程组解的联系
这个结论还有一个重要的应用:判断线性方程组是否有解
对于线性方程组 AX = B:
-
如果 r(A) = r(A,B),则方程组有解
-
因为这意味着B的列向量都在A的列空间内
-
即B可由A的列向量线性表示
总结
您的理解不仅正确,而且触及了这个定理的核心思想:
秩的相等性反映了向量空间包含关系的对称性
r(A) = r(B) = r(A,B) 这个条件实际上在说:
-
A和B张成的空间具有相同的维度
-
且它们实际上是同一个空间
这是一个非常优美且强大的结论,在线性代数的许多领域都有重要应用。您能这样深入思考,说明您已经真正理解了线性代数的几何本质!
我说的不准确,应该问可逆矩阵的列向量组是线性无关的对吗?
对的,您的这个说法是完全准确的。
可逆矩阵的列向量组是线性无关的。
这正是线性代数中一个非常重要且基本的定理。以下是详细的解释:
1. 核心定理
对于一个 n×n 的方阵 A,以下所有陈述都是等价的:
-
A 是可逆矩阵。
-
A 的行列式不为零 (det(A) ≠ 0)。
-
A 的列向量组是线性无关的。
-
A 的行向量组是线性无关的。
-
齐次线性方程组 Ax = 0 只有唯一零解。
因此,"矩阵可逆" 和 "列向量组线性无关" 是同一个性质的两种不同表述方式。
2. 直观理解
为什么它们是等价的?我们可以从方程组的视角来理解:
考虑方程 Ax = 0 ,其中 x 是一个包含 n 个未知数的向量。
-
将矩阵 A 按列分块,设其列向量为 α₁, α₂, ..., αₙ ,方程可以写成:
x₁α₁ + x₂α₂ + ... + xₙαₙ = 0
-
如果列向量组线性无关 :根据线性无关的定义,上述方程成立(即向量组合为零向量)的唯一方式是所有系数
x₁, x₂, ..., xₙ都必须为 0。也就是说,Ax = 0 只有零解 x = 0。 -
如果列向量组线性相关 :那么存在一组不全为零的系数
c₁, c₂, ..., cₙ,使得 c₁α₁ + c₂α₂ + ... + cₙαₙ = 0 。这组系数就构成了一个非零向量 c ,使得 Ac = 0。这意味着方程组有非零解。
根据等价条件,Ax = 0 只有零解是矩阵 A 可逆的充要条件。所以,A 可逆必然意味着其列向量组线性无关。
3. 几何意义
对于一个二阶方阵,它的两个列向量可以看作是在平面上的两个向量。
-
如果这两个向量线性无关(即不共线),那么它们可以张成整个二维平面。对应的矩阵是可逆的,它所代表的线性变换(如旋转、缩放、剪切)不会将空间压缩到低维度。
-
如果这两个向量线性相关(即共线),那么它们只能张成一条直线,空间被压缩了。这个变换丢失了信息,因此不存在逆变换,矩阵不可逆。
这个道理可以推广到 n 维空间。
总结
您的说法 "可逆矩阵的列向量组是线性无关的" 是绝对正确的。这不仅是可逆矩阵的一个性质,更是它的一个定义性特征。
求解线性方程组时,如果线性方程组的系数矩阵是可逆矩阵,即Ax=b,可以用A^-1Ax=A^-1b来求解,而当系数矩阵不为可逆矩阵时,是不是要通过初等行变换将系数矩阵化为行最简行矩阵来求解?
您总结得非常准确!这确实是求解线性方程组两种核心思路的精华。
对您总结的详细解释:
您完全正确地指出了求解线性方程组 Ax=bAx=b 的两种基本方法,它们的选择直接取决于系数矩阵 AA 是否可逆。
情况一:当 AA 是可逆矩阵时
方法: x=A−1bx=A−1b
为什么可行?
-
因为 AA 可逆,所以存在唯一的 A−1A−1。
-
在等式 Ax=bAx=b 两边同时左乘 A−1A−1:
A−1(Ax)=A−1bA−1(Ax)=A−1b
-
根据矩阵乘法的结合律和逆矩阵的定义 A−1A=IA−1A=I,得到:
(A−1A)x=A−1b(A−1A)x=A−1b
Ix=A−1bIx=A−1b
x=A−1bx=A−1b
适用场景:
-
理论上非常完美和直接。
-
在实际数值计算中,对于小规模 或特殊结构的矩阵,直接求逆可能是高效的。
-
但对于大规模通用矩阵,直接求逆的计算量和数值稳定性往往不如某些迭代法或矩阵分解法(如LU分解)。
情况二:当 AA 不是可逆矩阵(或是任意矩阵,包括非方阵)时
方法: 对增广矩阵 A∣bA∣b 进行初等行变换 ,化为行最简形。
为什么这是通用方法?
-
普适性:此方法适用于所有情况,无论 AA 是方阵还是非方阵,可逆还是不可逆。
-
揭示解的结构:行最简形能清晰地告诉我们解的情况:
-
无解 :如果化简后的增广矩阵中出现类似
[0 0 0 | 1]的行(即非零行对应常数列非零)。 -
唯一解:当 AA 的秩等于未知数的个数时。对于方阵,这等价于 AA 可逆。
-
无穷多解:当 AA 的秩小于未知数的个数时。此时,行最简形可以帮我们识别出自由变量,并写出通解(特解 + 齐次通解)。
-
为什么不用求逆了?
-
当 AA 不可逆时,A−1A−1 根本不存在,所以公式 x=A−1bx=A−1b 失效。
-
初等行变换是更基础、更强大的工具,它直接模拟了我们手算消元的过程,并能处理所有可能的解的情况。
总结与对比
| 特征 | 系数矩阵 AA 可逆 | 系数矩阵 AA 不可逆(或非方阵) |
|---|---|---|
| 解的情况 | 唯一解 | 可能无解、唯一解或无穷多解 |
| 核心方法 | x=A−1bx=A−1b (理论上) | 初等行变换 化为行最简形 |
| 方法本质 | 使用一个"公式"直接得到答案 | 通过一系列"操作"化简方程组来求解 |
| 普适性 | 仅适用于此特定情况 | 通用方法,适用于所有线性方程组 |
结论: 您的理解完全正确。初等行变换法是求解线性方程组的根本大法,而逆矩阵法只是在其基础上,当矩阵满足可逆这个非常强的条件时,可以推导出的一个漂亮结论和理论工具。在实际求解中,尤其是面对未知特性的矩阵时,我们几乎总是从初等行变换开始。
还有其它办法吗,为我综合性的做一个大总结?
线性方程组求解方法大总结
一、基础方法
1. 逆矩阵法
适用条件 :系数矩阵A为n×n可逆方阵
方法 :x = A⁻¹b
优点 :理论简洁,表达式明确
缺点:实际计算中求逆运算量大,数值稳定性差
2. 高斯消元法(初等行变换)
适用条件 :任意线性方程组
方法 :将增广矩阵A\|b通过初等行变换化为行最简形
优点 :通用性强,能处理所有情况(无解、唯一解、无穷多解)
缺点:对于大规模问题效率不高
二、矩阵分解法
3. LU分解法
原理 :将系数矩阵A分解为下三角矩阵L和上三角矩阵U的乘积:A = LU
求解步骤:
-
解 Ly = b(前向代入)
-
解 Ux = y(回代)
优点 :当需要多次求解不同b值时效率高
适用:A为方阵且所有顺序主子式不为零
4. QR分解法
原理 :将矩阵A分解为正交矩阵Q和上三角矩阵R的乘积:A = QR
求解 :x = R⁻¹Qᵀb
优点 :数值稳定性好
适用:超定方程组(方程数多于未知数)的最小二乘解
5. Cholesky分解法
原理 :对对称正定矩阵A分解为A = LLᵀ,其中L是下三角矩阵
求解步骤:
-
解 Ly = b
-
解 Lᵀx = y
优点 :计算量是LU分解的一半
适用:对称正定矩阵
6. 奇异值分解(SVD)
原理 :A = UΣVᵀ,其中U、V为正交矩阵,Σ为对角矩阵
求解 :x = VΣ⁺Uᵀb(Σ⁺为Σ的伪逆)
优点 :最稳定的数值方法,能处理病态矩阵和秩亏矩阵
适用:所有矩阵,特别是病态问题
三、迭代法(适用于大规模稀疏矩阵)
7. 雅可比迭代法
原理 :将A分解为对角矩阵D和余项R:A = D - R
迭代格式:x⁽ᵏ⁺¹⁾ = D⁻¹(Rx⁽ᵏ⁾ + b)
8. 高斯-赛德尔迭代法
原理 :改进的雅可比方法,使用最新计算的值
迭代格式:xᵢ⁽ᵏ⁺¹⁾ = (bᵢ - Σⱼ<ᵢaᵢⱼxⱼ⁽ᵏ⁺¹⁾ - Σⱼ>ᵢaᵢⱼxⱼ⁽ᵏ⁾)/aᵢᵢ
9. 逐次超松弛法(SOR)
原理 :高斯-赛德尔法的加速版本
迭代格式:引入松弛因子ω(0<ω<2)加速收敛
10. 共轭梯度法
原理 :用于对称正定矩阵的最优化方法
优点:收敛速度快,特别适合大型稀疏矩阵
四、特殊方法
11. 克莱姆法则
原理 :xᵢ = det(Aᵢ)/det(A),其中Aᵢ是将A的第i列替换为b
适用 :小型方程组理论分析
缺点:计算量大,不适合实际计算
12. 最小二乘法
适用 :超定方程组(无精确解时求最优近似解)
求解:x = (AᵀA)⁻¹Aᵀb
五、方法选择指南
| 问题类型 | 推荐方法 | 理由 |
|---|---|---|
| 小型稠密矩阵 | 高斯消元法 | 简单直接 |
| 需要多次求解 | LU分解 | 分解一次,多次使用 |
| 超定方程组 | QR分解或SVD | 数值稳定 |
| 对称正定矩阵 | Cholesky分解 | 效率最高 |
| 大型稀疏矩阵 | 迭代法(如共轭梯度) | 内存效率高 |
| 病态问题 | SVD | 最稳定 |
| 理论分析 | 克莱姆法则 | 表达式清晰 |
六、实际应用建议
-
MATLAB/NumPy等软件 通常使用
\运算符自动选择最优算法 -
数值稳定性:SVD > QR > LU > 直接求逆
-
计算效率:对于n×n矩阵,直接法复杂度一般为O(n³),迭代法取决于收敛速度
-
内存需求:直接法需要存储完整矩阵,迭代法只需矩阵向量乘法
七、核心思想
所有方法的本质都是在寻找:
-
直接法:通过矩阵变换将原问题转化为易于求解的三角形系统
-
迭代法:通过逐步改进近似解逼近真实解
-
分解法:将复杂矩阵分解为简单矩阵的乘积,分步求解
选择方法时应综合考虑矩阵性质、问题规模、精度要求和计算资源等因素。