主/从进程池架构
一、原理
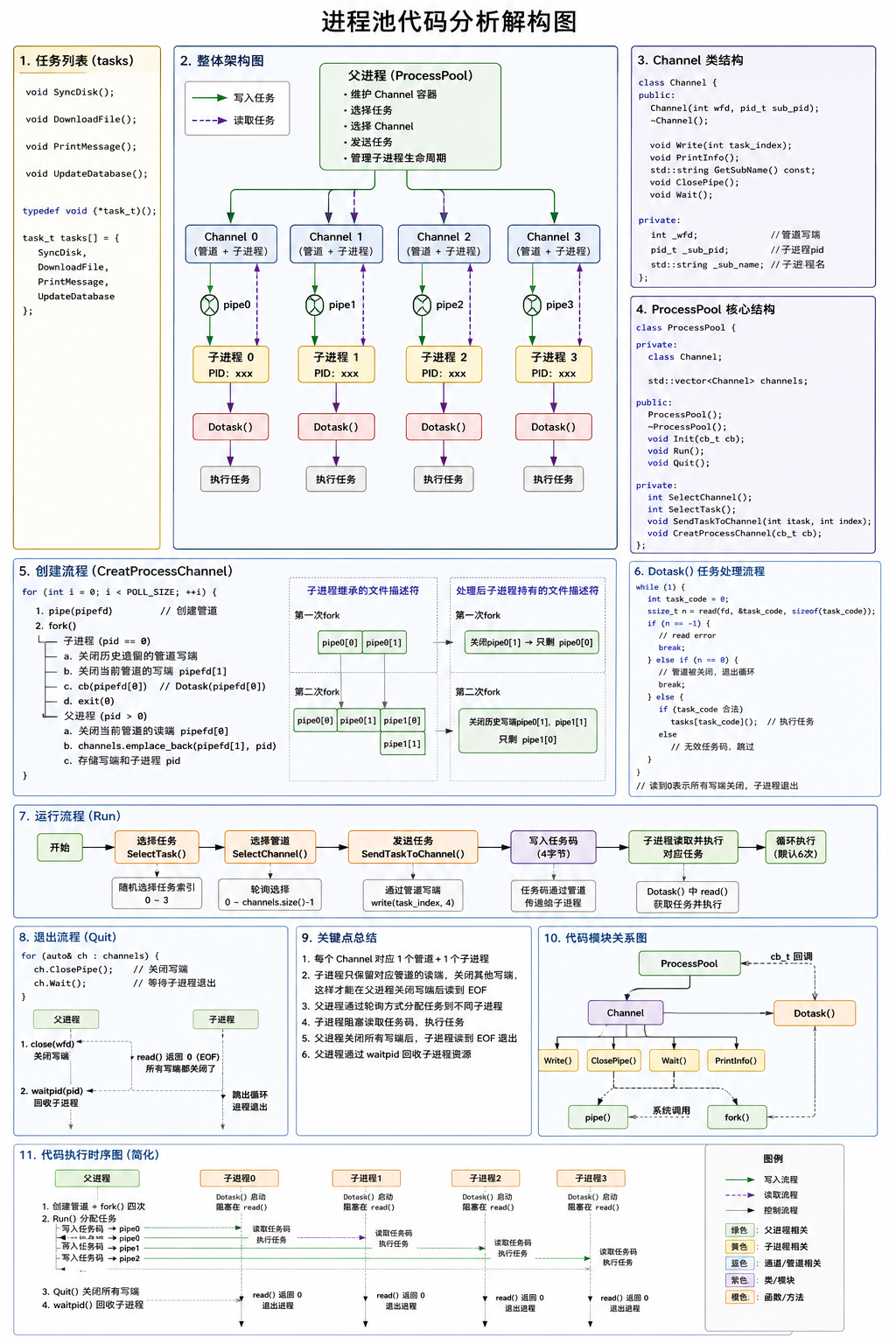
1 个主进程(Master)+ 预先创建 N 个子进程(Worker)
主进程只管分配任务 ,子进程只管处理任务,
通过管道 通信,实现高并发、稳定、不重复创建销毁进程。
二、三大核心角色
1. Master(主进程)
- 唯一
- 不处理业务
- 只做 4 件事:
- 创建进程池(fork 一堆子进程)
- 接收任务
- 分发任务(发给空闲子进程)
- 管理子进程(监控、重启、回收)
2. Worker(子进程 → 进程池)
- 预先创建好 N 个
- 一直活着,不退出
- 阻塞等待任务
- 收到任务 → 处理 → 继续等待
3. 管道(通信通道)
- 每个子进程一条管道
- Master 写 → 发任务
- Worker 读 → 收任务
- 阻塞等待,天然实现同步控制
三、代码
cpp
#include <cstdlib>
#include <ctime>
#include <iostream>
#include <string>
#include <unistd.h>
#include <vector>
#include <functional>
#include <sys/wait.h>
#include <sys/types.h>
#define POLL_SIZE 4
// ***********************************任务列表*********************************************
void SyncDisk() {
std::cout << "同步磁盘..." << std::endl;
}
void DownloadFile() {
std::cout << "下载文件..." << std::endl;
}
void PrintMessage() {
std::cout << "打印消息..." << std::endl;
}
void UpdateDatabase() {
std::cout << "更新数据库..." << std::endl;
}
typedef void (*task_t)(); // 定义一个函数指针类型,指向任务函数
task_t tasks[] = {SyncDisk, DownloadFile, PrintMessage, UpdateDatabase}; // 任务列表
// ***********************************进程池实现*******************************************
enum {
OK = 0,
PIPE_ERROR,
FORK_ERROR
};
void Dotask(int fd) { // 任务的入口
while (1) {
int task_code = 0;
ssize_t n = read(fd, &task_code, sizeof(task_code)); // 约定好读取4字节的任务码
if (n == -1) {
std::cerr << "read error" << std::endl;
break;
}
else if (n == 0) {
std::cout << "没有任务了..." << std::endl;
break; // 管道被关闭,退出循环
}
else {
if (task_code < 0 || task_code >= sizeof(tasks) / sizeof(task_t)) {
std::cerr << "Invalid task code: " << task_code << std::endl;
continue; // 跳过无效的任务码
}
// 根据任务码执行对应的任务函数
tasks[task_code]();
}
}
}
// typedef std::function<void (int)> cb_t;
using cb_t = std::function<void (int)>;
class ProcessPool {
private:
// 定义一个内部Channel类,保存管道写端和子进程pid
class Channel {
public:
Channel(int wfd, pid_t sub_pid)
: _wfd(wfd), _sub_pid(sub_pid)
{
_sub_name = "sub_channel_" + std::to_string(sub_pid);
}
~Channel()
{
}
void Write(int task_index) {
ssize_t n = write(_wfd, &task_index, sizeof(task_index));
(void)n; // 忽略写入结果
}
void PrintInfo() {
printf("Channel Info - Sub PID: %d, Sub Name: %s\n", _sub_pid, _sub_name.c_str());
}
std::string GetSubName() const {
return _sub_name;
}
void ClosePipe() {
std::cout << "关闭管道wfd: " << _wfd << std::endl;
close(_wfd);
}
void Wait() {
waitpid(_sub_pid, nullptr, 0);
std::cout << "回收子进程: " << " PID: " << _sub_pid << std::endl;
}
private:
int _wfd; // 写管道文件描述符
pid_t _sub_pid; // 子进程pid
std::string _sub_name; // 子进程名字
};
public:
ProcessPool() {
srand((unsigned int)time(nullptr) ^ (unsigned int)getpid()); // 设置随机数种子
}
~ProcessPool(){}
void Init(cb_t cb) {
CreatProcessChannel(cb);
}
void Debug() {
for (auto& ch : channels) {
ch.PrintInfo();
}
}
void Run() {
int cnt = 6;
while (cnt--) {
std::cout << "---------------------------------------------" << std::endl;
// 1. 选择一个任务
int itask = SelectTask();
std::cout << "选择任务: index: " << itask << std::endl;
// 2. 选择一个channel(管道+子进程),本质是选择一个下标
int index = SelectChannel();
std::cout << "选择管道: index: " << index << std::endl;
// 3. 发送任务给指定的channel(管道+子进程)
SendTaskToChannel(itask, index);
std::cout << "发送任务 index " << itask << " 到管道 index " << index << std::endl;
}
}
void Quit() {
// 想要1 : 1地回收,就要改变CreateProcessChannel的实现
// 就要在子进程中关闭历史遗留的管道写端
// 从而实现1 : 1地回收资源。
for (auto& ch : channels) {
ch.ClosePipe(); // 关闭写端
ch.Wait();
}
// 逆向回收资源
// int end = channels.size() - 1;
// for (int i = end; i >= 0; --i) {
// channels[i].ClosePipe(); // 关闭写端
// channels[i].Wait(); // 等待子进程退出
// }
// 1:1回收演示
// for (auto& ch : channels) {
// ch.ClosePipe(); // 关闭写端
// ch.Wait();
// }
// // 1. 关闭所有管道写端,通知子进程退出
// for (auto& ch : channels) {
// ch.ClosePipe(); // 关闭写端
// }
// // 2. 等待所有子进程退出
// for (auto& ch : channels) {
// ch.Wait();
// }
}
private:
int SelectChannel() {
// 这里简单的轮询选择一个channel
static int index = 0;
int selected = index % channels.size();
++index;
return selected;
}
int SelectTask() {
// 轮询选择一个任务
int itask = rand() % (sizeof(tasks) / sizeof(task_t));
return itask;
}
void SendTaskToChannel(int itask, int index) {
if (itask < 0 || itask >= sizeof(tasks) / sizeof(task_t)) {
std::cerr << "Invalid task index: " << itask << std::endl;
return;
}
if (index < 0 || index >= channels.size()) {
std::cerr << "Invalid channel index: " << index << std::endl;
return;
}
// 将任务索引写入管道,通知子进程执行对应的任务
channels[index].Write(itask);
}
void CreatProcessChannel(cb_t cb) {
for (int i = 0; i < POLL_SIZE; ++i) {
int pipefd[2] = {0};
int ret = pipe(pipefd);
if (ret == -1) {
std::cerr << "pipe error" << std::endl;
exit(PIPE_ERROR);
}
pid_t pid = fork();
if (pid == -1) {
std::cerr << "fork error" << std::endl;
exit(FORK_ERROR);
}
else if (pid == 0) {
// 子进程
if (!channels.empty()) {
for (auto& ch : channels) {
ch.ClosePipe(); // 关闭历史遗留的管道写端
}
}
close(pipefd[1]); // 关闭写端
cb(pipefd[0]);
exit(OK);
}
else {
// 父进程
close(pipefd[0]); // 关闭读端
// 创建一个channel对象,保存管道写端和子进程pid
channels.emplace_back(pipefd[1], pid);
// Channel ch(pipefd[1], pid);
// channels.emplace_back(ch); // 将channel对象添加到容器中
std::cout << "创建了一个管道PID: " << pid << "到管道容器中了" << std::endl;
sleep(1);
}
}
}
private:
std::vector<Channel> channels; // 要有未来组织所有channel的容器
};
int main() {
// 1. 初始化一个进程池对象
ProcessPool pool;
pool.Init(Dotask);
// 2. 运行进程池
pool.Run();
// 3. 结束进程池释放资源
pool.Quit();
return 0;
}Linux 进程池(ProcessPool)源码解析
一、项目目标
实现一个简单的进程池:
- 父进程负责调度任务
- 子进程负责执行任务
- 父子进程通过匿名管道通信
- 父进程发送任务码
- 子进程根据任务码执行对应任务
二、整体架构
Parent(ProcessPool)
│
┌────────────────────┼────────────────────┐
│ │ │
│ │ │
pipe0 pipe1 pipe2
│ │ │
▼ ▼ ▼
Child0 Child1 Child2
│ │ │
Dotask() Dotask() Dotask()
│ │ │
└────────────执行任务────────────┘父进程:
c++
ProcessPool负责:
- 创建子进程
- 创建管道
- 选择任务
- 分发任务
- 回收子进程
三、任务系统
任务定义
c++
void SyncDisk();
void DownloadFile();
void PrintMessage();
void UpdateDatabase();任务表
c++
typedef void (*task_t)();
task_t tasks[] =
{
SyncDisk,
DownloadFile,
PrintMessage,
UpdateDatabase
};本质:
c++
任务码 → 函数地址对应关系:
| 任务码 | 任务 |
|---|---|
| 0 | SyncDisk |
| 1 | DownloadFile |
| 2 | PrintMessage |
| 3 | UpdateDatabase |
四、ProcessPool类设计
c++
class ProcessPool
{
private:
vector<Channel> channels;
};保存所有:
管道 + 子进程五、Channel设计
Channel是什么
一个Channel对应:
一个管道
+
一个子进程类结构
c++
class Channel
{
private:
int _wfd;
pid_t _sub_pid;
string _sub_name;
};成员说明
_wfd
int _wfd;父进程保存:
管道写端用于发送任务。
_sub_pid
pid_t _sub_pid;保存:
子进程PID用于:
waitpid()回收资源。
_sub_name
sub_channel_xxx用于调试。
六、进程创建流程
CreateProcessChannel()
核心代码:
pipe(pipefd);
fork();创建过程
第一次循环
Parent
│
└── Child0生成:
pipe0第二次循环
Parent
├── Child0
└── Child1生成:
pipe1第三次循环
Parent
├── Child0
├── Child1
└── Child2生成:
pipe2最终:
Parent
│
├── Child0
├── Child1
├── Child2
└── Child3七、为什么关闭历史遗留写端
问题
fork会继承所有打开文件描述符。
例如:
pipe0创建Child0后:
Child0
拥有:
pipe0[0]
pipe0[1]关闭:
close(pipe0[1]);剩:
pipe0[0]继续fork Child1:
Child1会继承:
pipe0[1]
pipe1[1]此时:
Child1
持有 pipe0 写端如果父进程关闭:
pipe0 写端Child0仍然读不到EOF。
因为:
还有进程持有写端解决方案
c++
for(auto &ch : channels)
{
ch.ClosePipe();
}关闭历史遗留写端。
最终关系:
pipe0 → Child0
pipe1 → Child1
pipe2 → Child2
pipe3 → Child3形成:
1 Pipe
↓
1 Child八、任务执行流程
Dotask()
c++
void Dotask(int fd)
{
while(true)
{
read(fd,&task_code,sizeof(task_code));
}
}收到任务码
例如:
2表示:
PrintMessage();执行:
tasks[2]();执行流程:
父进程
│
write(2)
│
▼
pipe
│
▼
子进程
│
read()
│
▼
tasks[2]()
│
▼
PrintMessage()九、任务调度策略
SelectTask()
rand() % 4随机任务:
0~3SelectChannel()
static int index = 0;
selected =
index % channels.size();执行顺序:
0
1
2
3
0
1
2
3
...这种策略叫:
Round Robin
轮询调度十、运行流程图
┌───────────┐
│ Run() │
└─────┬─────┘
│
▼
选择任务
│
▼
选择Channel
│
▼
Write(任务码)
│
▼
管道传输
│
▼
子进程read()
│
▼
执行任务
│
▼
继续等待任务十一、退出流程
父进程
ClosePipe();关闭所有写端。
子进程
read(...)返回:
0表示:
EOF执行:
break;退出循环。
父进程回收
waitpid(pid,nullptr,0);流程:
Parent
│
close(wfd)
│
▼
Child
read()==0
│
▼
退出
│
▼
waitpid()
│
▼
回收完成十二、源码中的亮点
回调思想
using cb_t =
std::function<void(int)>;初始化:
pool.Init(Dotask);创建子进程后:
cb(pipefd[0]);调用:
Dotask(pipefd[0]);实现:
进程池框架
+
业务逻辑解耦。