一、老师给的范围
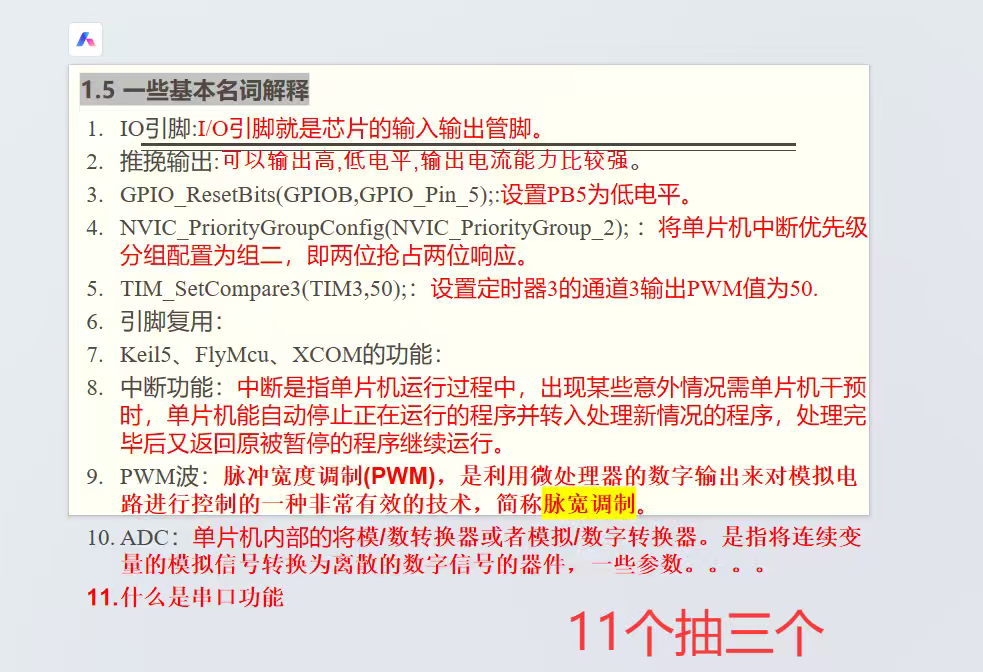
1.名词解释
 2.分析代码
2.分析代码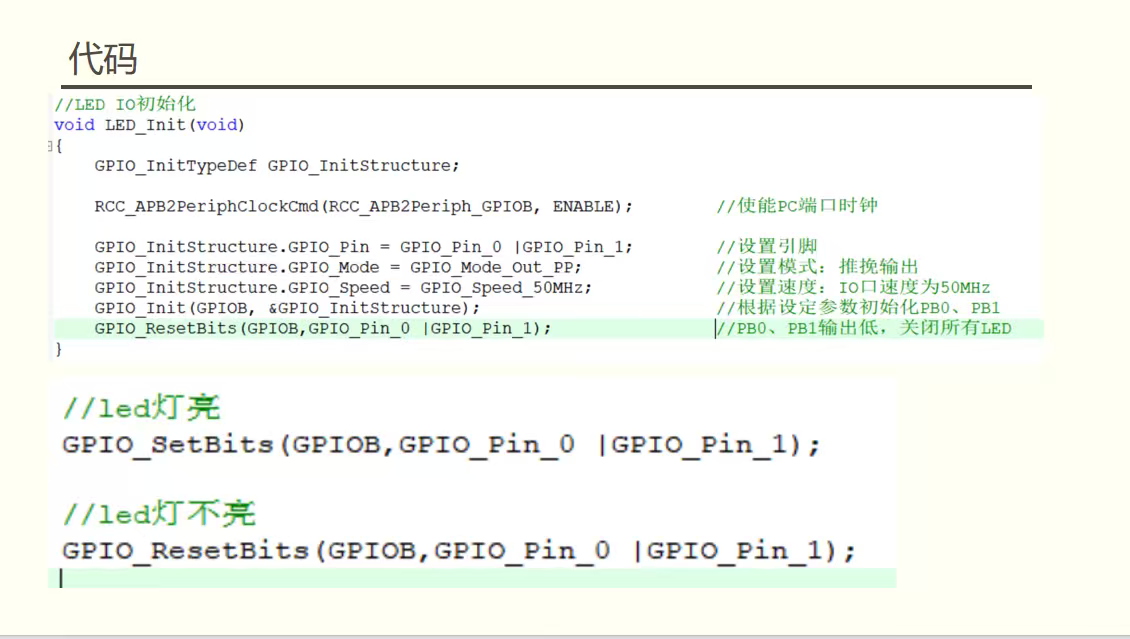
3.电路设计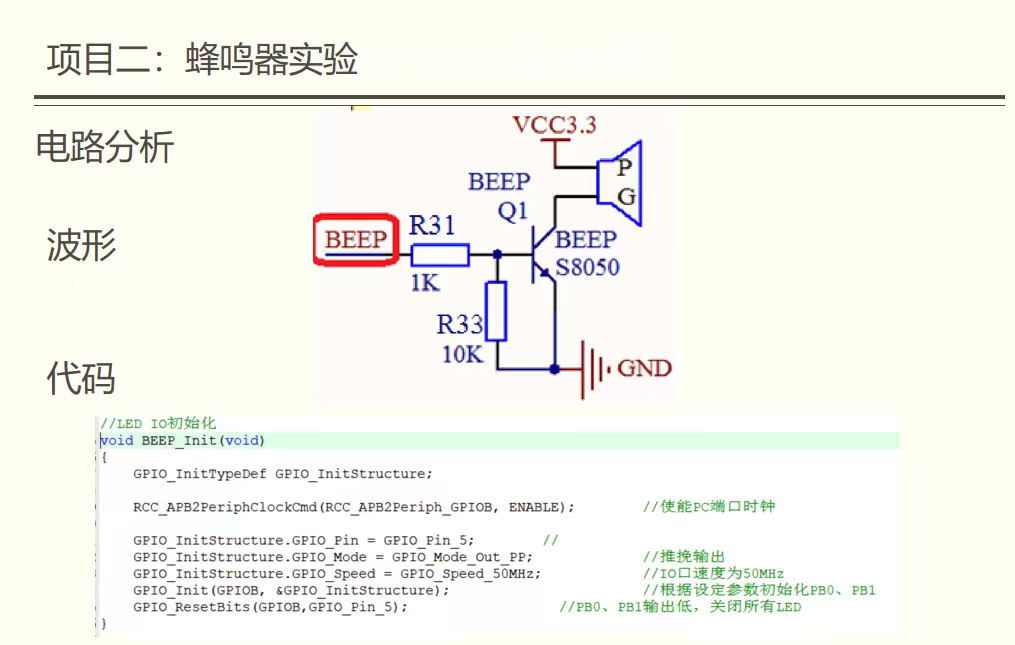
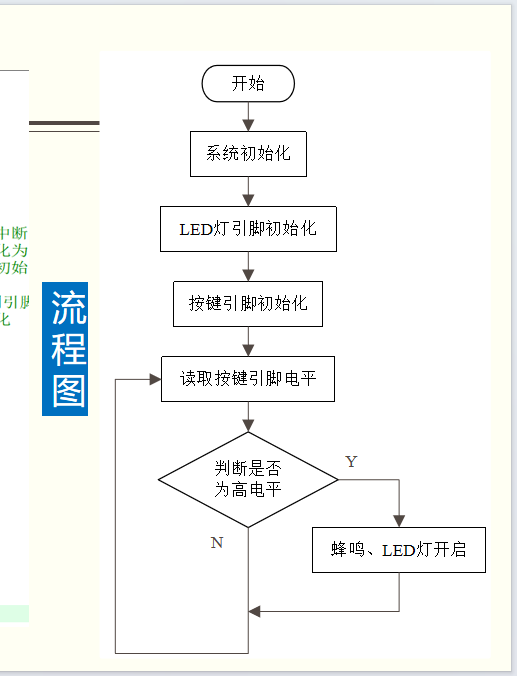
4.流程图绘制
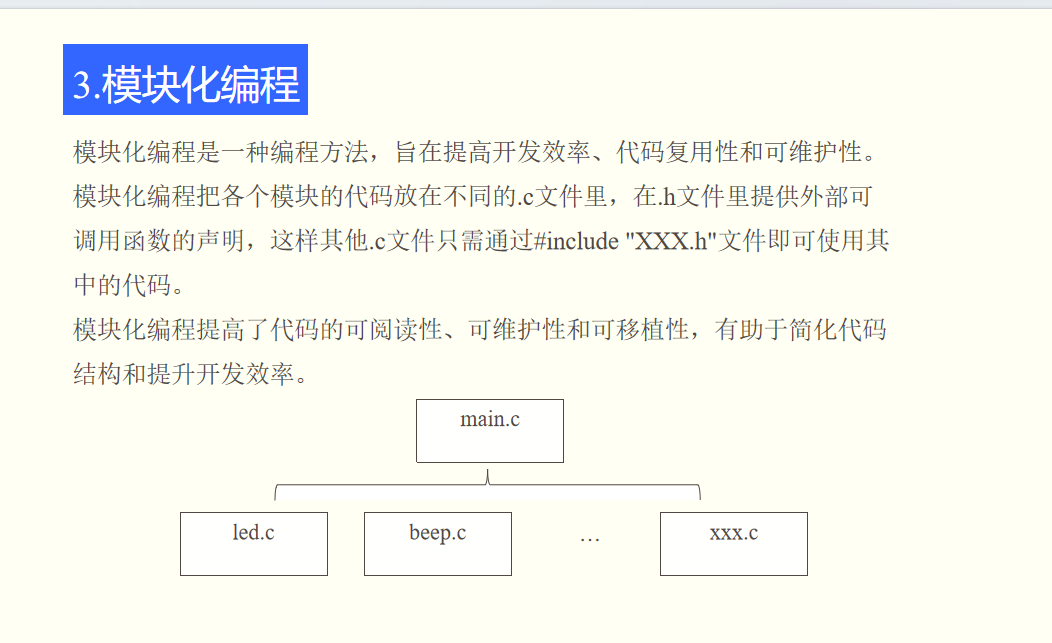
5.给你个模块,在代码中调用
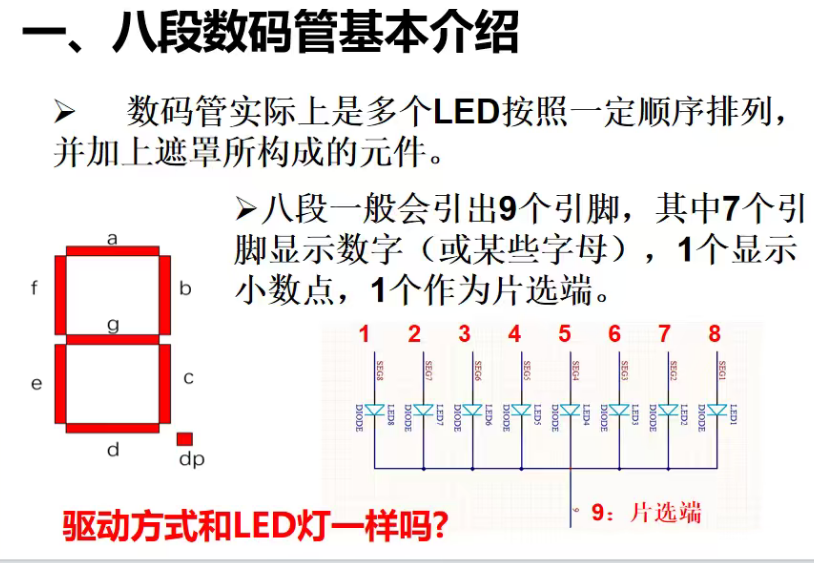
6.数码管

7.中断:判断执行先后,响应优先级、抢占优先级区别
8.串口代码也考,给你一个代码和函数解释,使用函数编程现有代码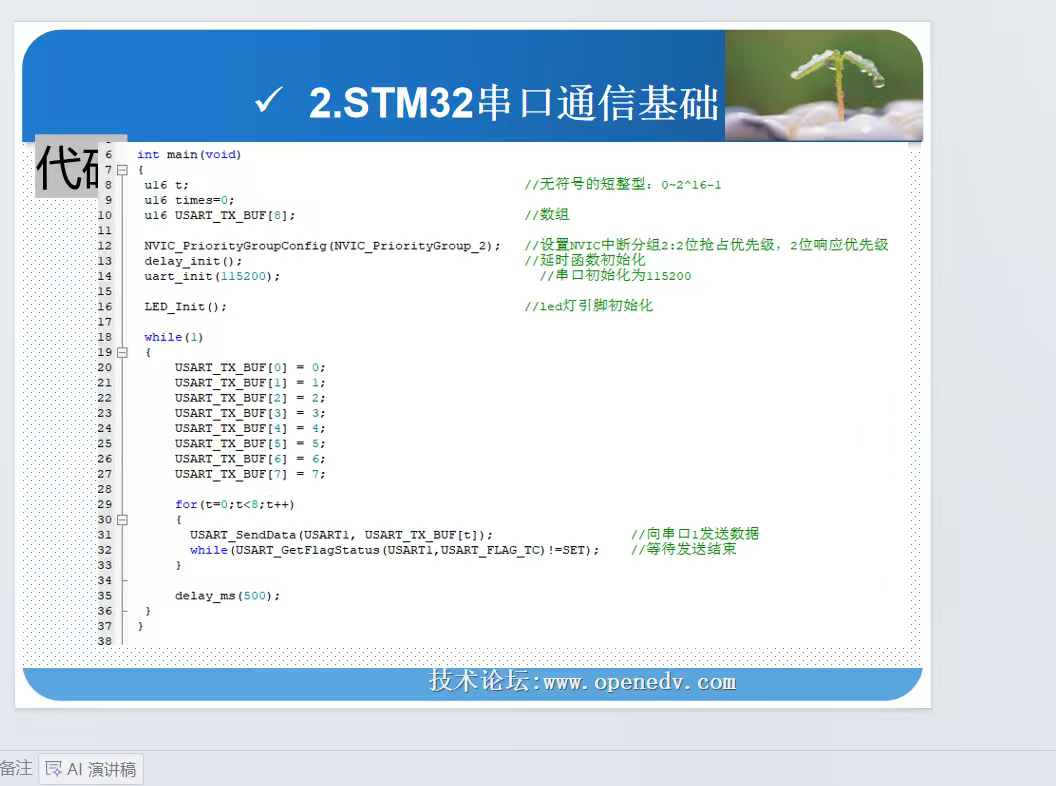
9.波特率和比特率的关系和公式
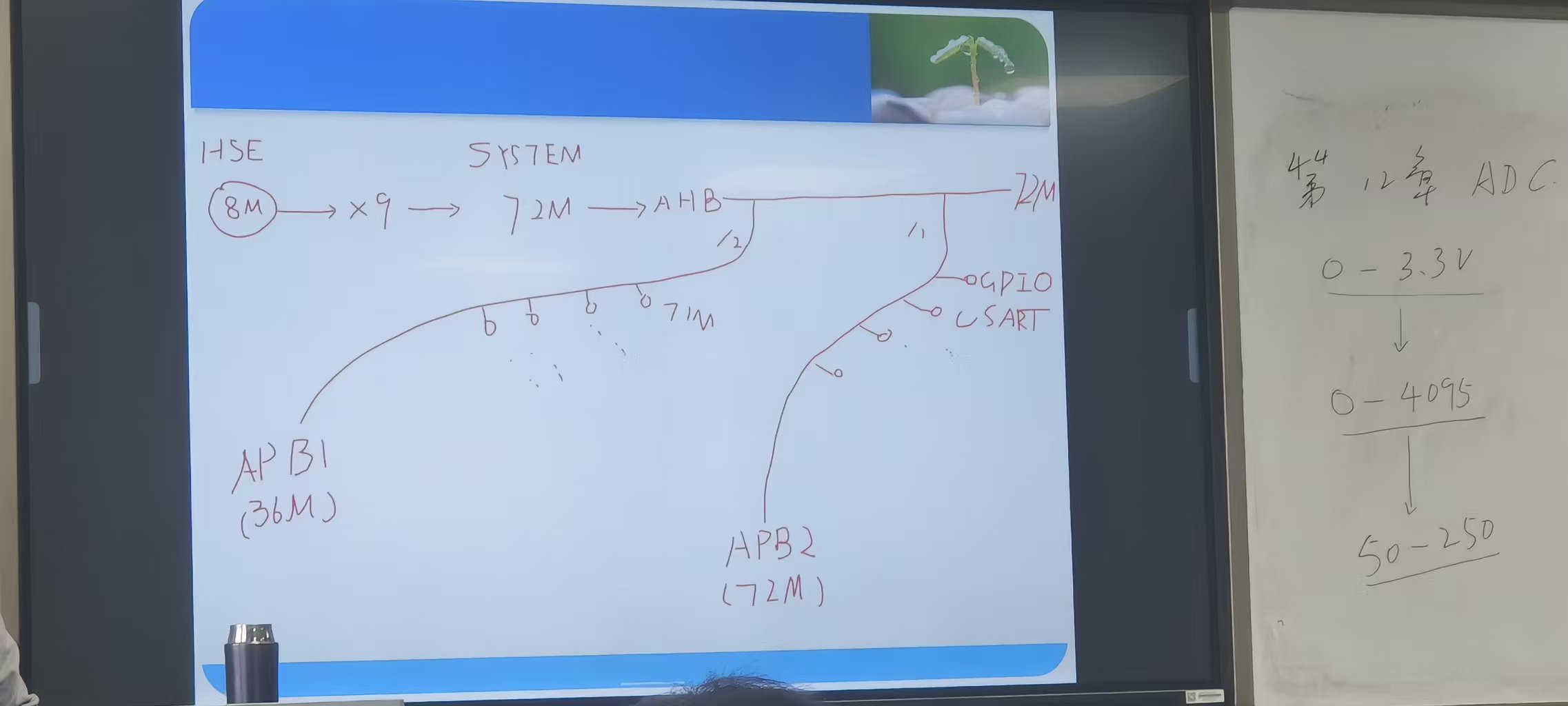
10.时钟系统考手绘图
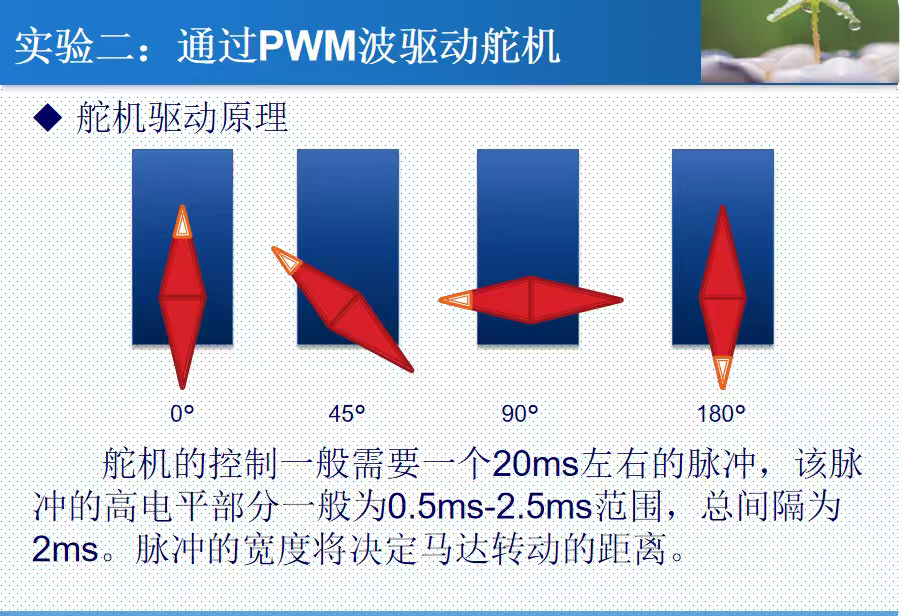
11.产生一个50Hz高电平占比、舵机驱动原理
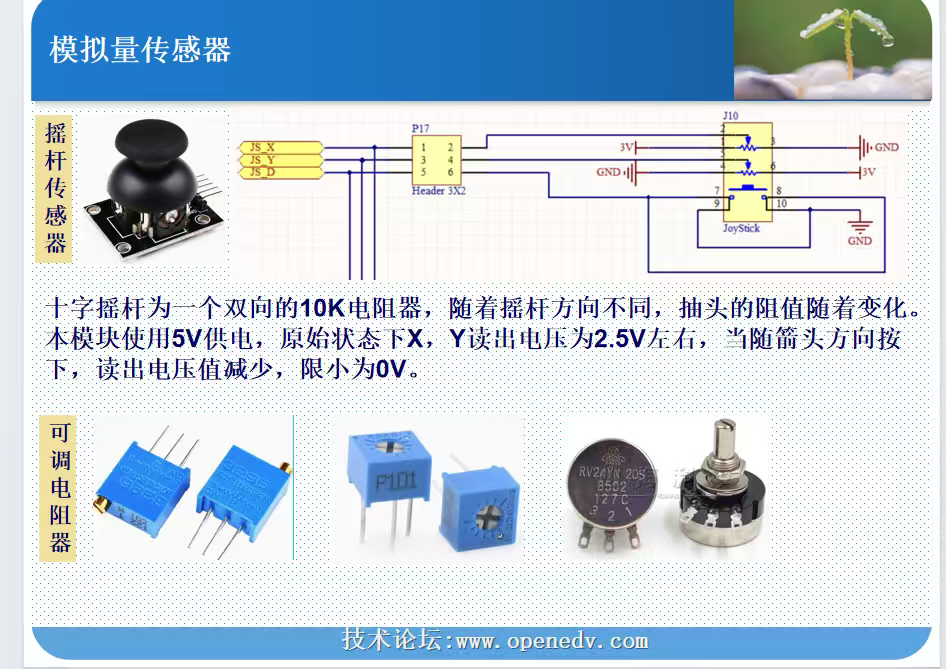
12.模拟量和数字量区别和采集
二、考试试卷
第一题(名词解释):
- ADC:
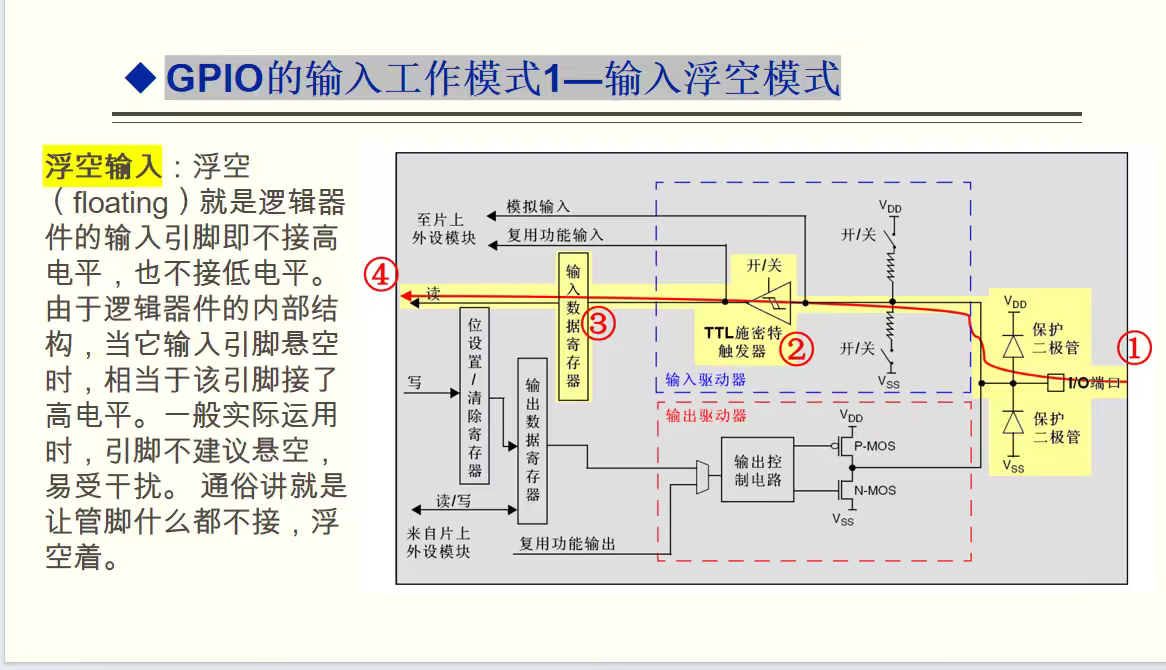
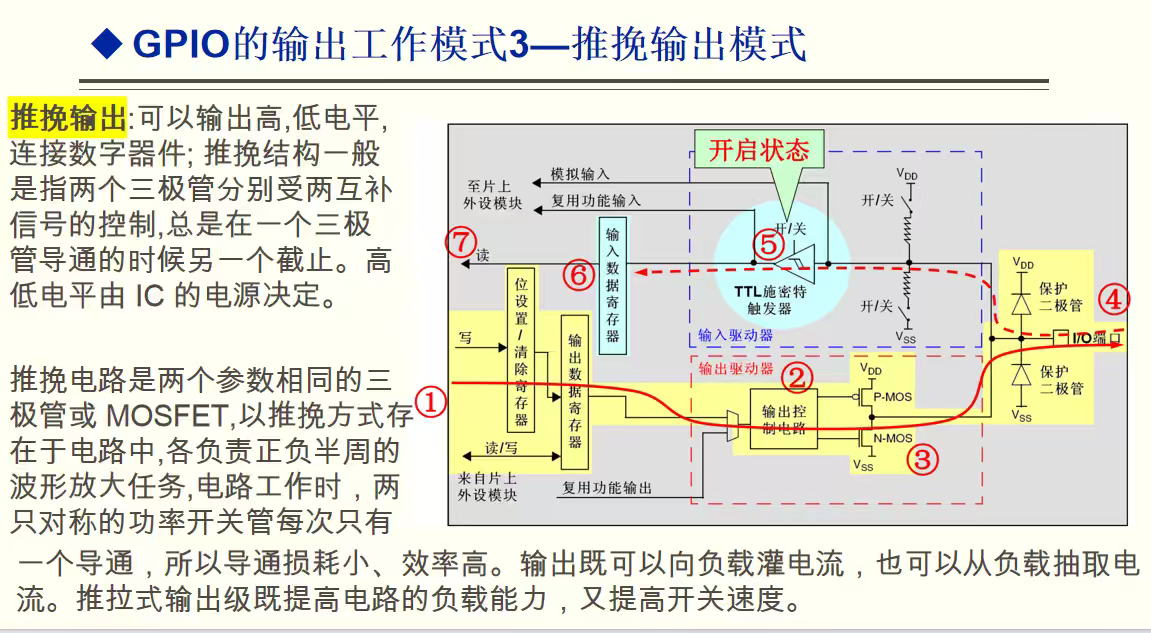
- GPIO
- 引脚复用
第二题:(简答题)
- 将motor.c在程序中调用,写出调用步骤
- ADC数模转换,12,参考电压3.3V,求输入信号2048的电压值
第三题(程序设计):
- 已知LED灯压降为2.1V,工作电流5mA,STM32参考电压3.3V,设计一个电路,使用PC1引脚控制LED灯,计算出电阻值,并解释电路基本原理。
- 已知电脑PC端电压5V,STM32电压3V,问:
①电脑和芯片能不能直接通信,如果不能为什么?
②设计一个降压模块(5V-3.3V)
第四题(电路设计):
|--------|--------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------|-----|
| Main.c | Int main(void);{ if(GPIO_ReadInputDataBit(GPIOA,GPIO_Pin_1)==0){//注释1 Delay_ms(20); GPIO_SetBits(GPIOC,GPIO_Pin_13); else if(GPIO_ReadInputDataBit(GPIOA,GPIO_Pin_2)==0){ Delay_ms(20); GPIO_ResetBits(GPIOC,GPIO_Pin_13); Else } | 注释1 |
| Key.c | #include "stm32f10x.h" #include "Delay.h" //初始化 void Key_Init(void){ RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE); GPIO_InitTypeDef GPIO_InitStructure; GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IPU;//注释2 GPIO_InitStructure.GPIO_Pin= GPIO_Pin_1|GPIO_Pin_2; GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz; GPIO_Init(GPIOB,&GPIO_InitStructure);} | 注释2 |
| Led.c | #include "stm32f10x.h" #include "Delay.h" //初始化 void Key_Init(void){ RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC,ENABLE); GPIO_InitTypeDef GPIO_InitStructure; GPIO_InitStructure.GPIO_Mode=GPIO_Mode_PP; GPIO_InitStructure.GPIO_Pin= GPIO_Pin_13; GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz; GPIO_Init(GPIOB,&GPIO_InitStructure);} | |
- KEY1、KET2、LED他们连接到芯片的那个引脚?
- 写出注释1和注释2
- 写出一个按钮一和按钮二都不按下,LED灯闪烁周期为1s的代码,补充到else里面。
- 写出主函数程序main.c,将{10,20,30,40,50},依次通过通道1发送到串口,串口函数FlagStatus USART_GetFlagStatus(USART_TypeDef* USARTx, uint16_t USART_FLAG)。
第五题(综合应用):
- 在芯片中有哪些通道可以输出PWM波
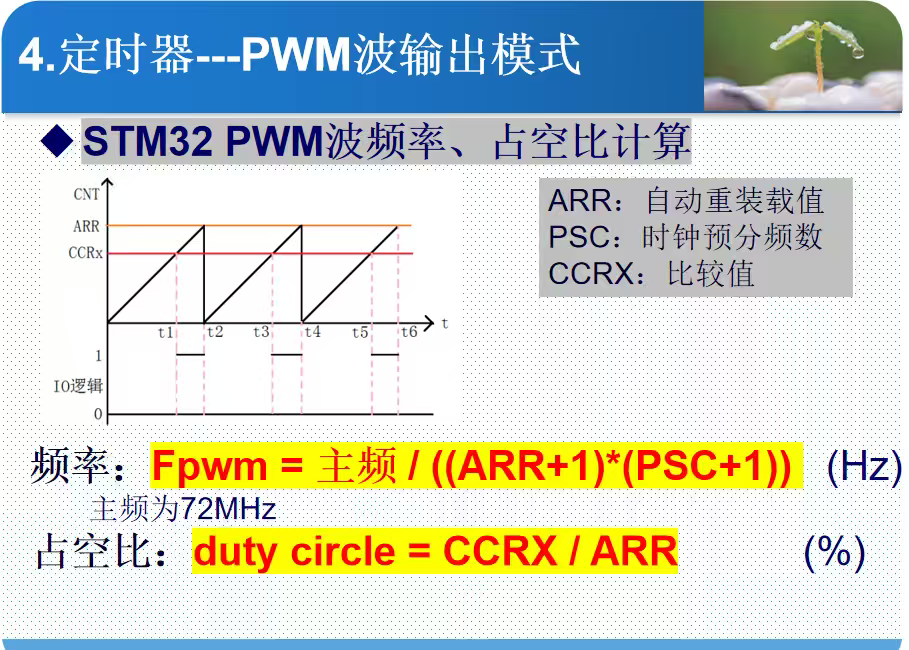
- PWM的定义
- 已知频率50Hz,主频72MHz,求RCC和PSC
- 欲将舵机转到90°,占空比,RCC,的值为多少?