第 26 篇把单摄预览会话拆开:CameraInput 负责打开设备,PreviewOutput 负责画面,PhotoOutput 负责拍照,PhotoSession 负责把它们配置到同一个会话里。
学习目标
- 建立 CameraInput、PreviewOutput、PhotoOutput、PhotoSession 的层次关系。
- 理解单摄回退为什么是双摄项目必须有的稳定路径。
- 能读懂 beginConfig、addInput、addOutput、commitConfig、start 的顺序。
- 知道并发能力为空时如何从双摄逻辑回到单摄逻辑。
一、单摄不是备用按钮,而是稳定主链路
双镜记忆相机的最终目标是前后摄同时记录,但真实设备上并发能力不一定存在。训练营项目因此把单摄链路做成完整能力,而不是临时 fallback。只要有一个可用 CameraDevice,页面就能通过单摄预览、单摄拍照和图库保存继续工作。
这篇重点拆 ensureSinglePreview:它把设备输入、预览输出、拍照输出和会话配置串起来。理解这条链路后,再看双摄会话就只是多一组 input/output 和更严格的能力约束。

图 1 单摄预览与图库结果形成闭环
二、先看状态字段:每种资源都有自己的位置
Index.ets 里相机相关字段看起来很多,但它们按层次分得很清楚。CameraDevice 表示设备选择;CameraInput 表示已经打开的输入;PreviewOutput 表示预览输出;PhotoOutput 表示拍照输出;PhotoSession 表示已经配置并启动的会话。
把这些字段拆开保存,是为了释放时能逐层关闭,也是为了 UI 能知道当前是单摄 live、后摄 live,还是前后摄都没连上。不要把所有东西塞进一个 currentCamera 对象,否则失败和释放时很难判断谁已经创建、谁还没有。

图 2 Index.ets 中按资源层次保存相机字段
ts
private backSurfaceId: string = '';
private frontSurfaceId: string = '';
private cameraManager?: camera.CameraManager;
private backCameraDevice?: camera.CameraDevice;
private frontCameraDevice?: camera.CameraDevice;
private preferredBackSingleCameraDevice?: camera.CameraDevice;
private singleCameraDevice?: camera.CameraDevice;
private backLensOptions: Array<CameraLensOption> = [];
private cameraFlashSupportedModes: Array<camera.FlashMode> = [];
private concurrentInfos: Array<camera.CameraConcurrentInfo> = [];
private backCameraInput?: camera.CameraInput;
private frontCameraInput?: camera.CameraInput;
private singleCameraInput?: camera.CameraInput;
private backPreviewOutput?: camera.PreviewOutput;
private frontPreviewOutput?: camera.PreviewOutput;
private singlePreviewOutput?: camera.PreviewOutput;
private backPhotoSession?: camera.PhotoSession;
private frontPhotoSession?: camera.PhotoSession;
private singlePhotoSession?: camera.PhotoSession;
private backPhotoOutput?: camera.PhotoOutput;
private frontPhotoOutput?: camera.PhotoOutput;
private singlePhotoOutput?: camera.PhotoOutput;
private pendingCaptureId: string = '';三、单摄会话的正确顺序
ensureSinglePreview 的顺序非常典型:先判断 activeTab、权限、单摄能力和 surfaceId;再从 capability 中取 previewProfiles 与 photoProfiles;然后 createCameraInput 并 open;接着创建 PreviewOutput 和 PhotoOutput;最后 createSession、beginConfig、addInput、addOutput、commitConfig、start。
这里最容易犯的错是顺序混乱。例如 input 还没 open 就 addInput,或者 previewProfiles 为空还硬取第一个。项目用多层 return 把这些无效状态挡在外面,使真正进入 beginConfig 的时候,资源已经满足会话配置要求。
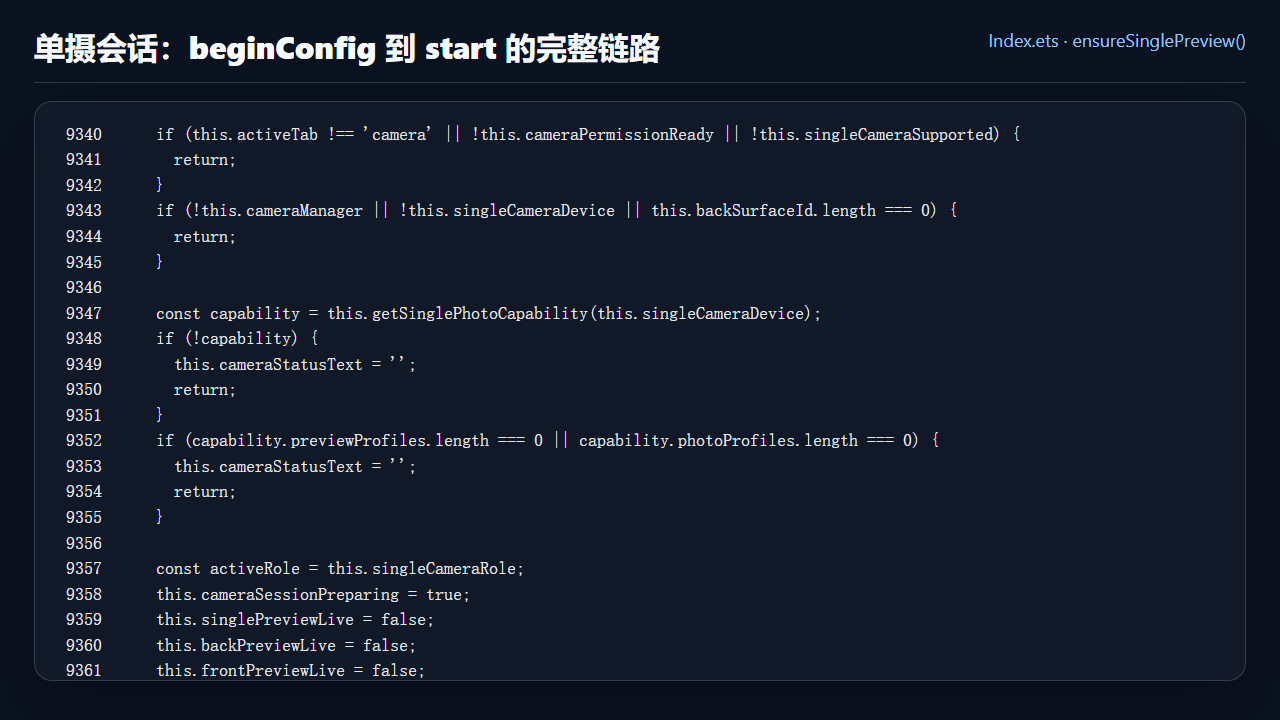
图 3 单摄 PhotoSession 从配置到启动的完整代码
ts
if (this.activeTab !== 'camera' || !this.cameraPermissionReady || !this.singleCameraSupported) {
return;
}
if (!this.cameraManager || !this.singleCameraDevice || this.backSurfaceId.length === 0) {
return;
}
const capability = this.getSinglePhotoCapability(this.singleCameraDevice);
if (!capability) {
this.cameraStatusText = '';
return;
}
if (capability.previewProfiles.length === 0 || capability.photoProfiles.length === 0) {
this.cameraStatusText = '';
return;
}
const activeRole = this.singleCameraRole;
this.cameraSessionPreparing = true;
this.singlePreviewLive = false;
this.backPreviewLive = false;
this.frontPreviewLive = false;
this.logCaptureTrace('ensure-single-preview-start', `role=${activeRole}`);
this.cameraStatusText = `${this.getCameraRoleLabel(activeRole)}预览连接中...`;
try {
this.singleCameraInput = this.cameraManager.createCameraInput(this.singleCameraDevice);
await this.singleCameraInput.open();
this.singlePreviewOutput = this.cameraManager.createPreviewOutput(
capability.previewProfiles[0],
this.backSurfaceId
);
this.singlePreviewOutput.on('frameStart', () => {
this.handleSinglePreviewFrameStart(activeRole);
});
this.singlePhotoOutput = this.cameraManager.createPhotoOutput(this.pickBestPhotoProfile(capability.photoProfiles));
this.bindPhotoOutput(activeRole, this.singlePhotoOutput, 'single');
this.singlePhotoSession = this.cameraManager.createSession(camera.SceneMode.NORMAL_PHOTO) as camera.PhotoSession;
this.singlePhotoSession.beginConfig();
this.singlePhotoSession.addInput(this.singleCameraInput);
this.singlePhotoSession.addOutput(this.singlePreviewOutput);
this.singlePhotoSession.addOutput(this.singlePhotoOutput);
await this.singlePhotoSession.commitConfig();
await this.singlePhotoSession.start();
this.cameraSessionActive = true;
this.syncZoomStateFromSession();
this.refreshCameraFlashState();四、双摄能力为空时如何回退
单摄链路的价值来自前面的能力探测。项目先尝试用 getCameraDevice 找官方默认后摄和前摄,再调用 getCameraConcurrentInfos。如果 concurrentInfos 为空,说明设备不提供前后摄同时预览的组合。这种情况下,不应该继续强开双摄,而是保存 fallbackSingleDevice,让 singleCameraSupported 为 true,后面由 ensureCameraPreview 进入单摄预览。
这和"捕获异常后重试"完全不同。异常重试不知道为什么失败,能力回退知道当前设备能做什么。训练营文章后续讲双摄、镜头和闪光灯时,都会把这个能力判断当作前置条件。
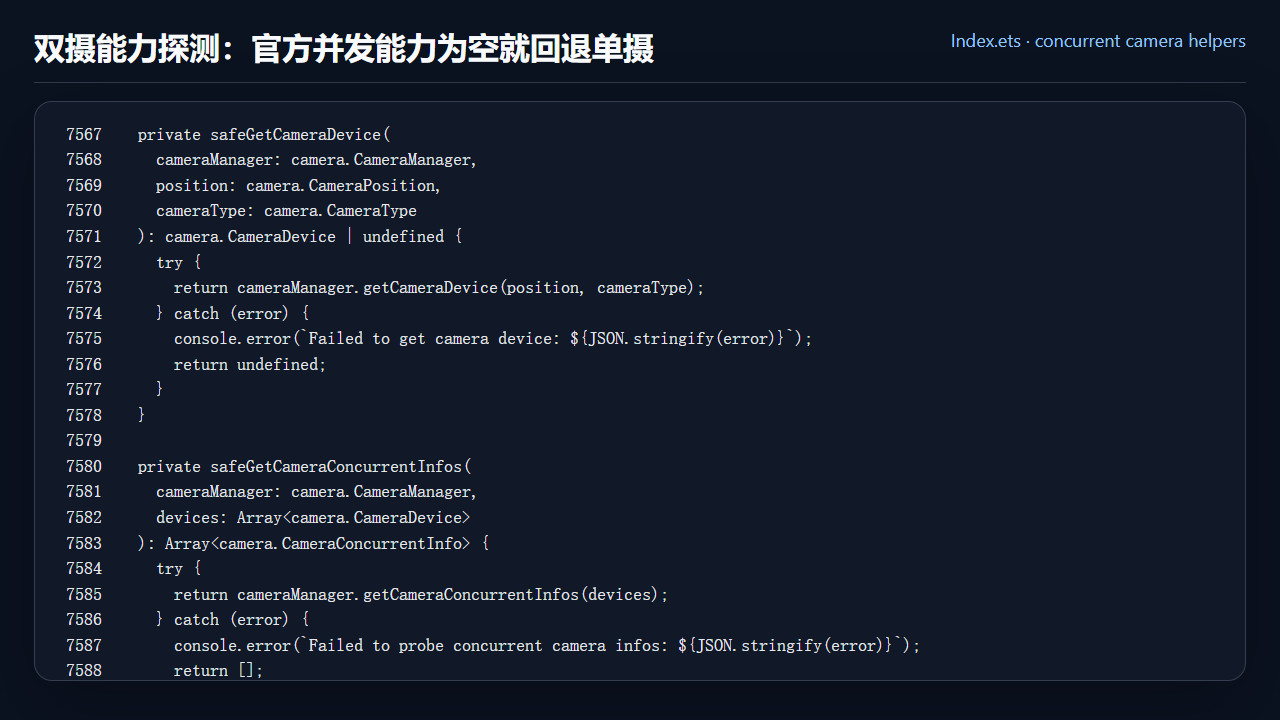
图 4 官方并发能力探测与单摄回退代码
ts
private safeGetCameraDevice(
cameraManager: camera.CameraManager,
position: camera.CameraPosition,
cameraType: camera.CameraType
): camera.CameraDevice | undefined {
try {
return cameraManager.getCameraDevice(position, cameraType);
} catch (error) {
console.error(`Failed to get camera device: ${JSON.stringify(error)}`);
return undefined;
}
}
private safeGetCameraConcurrentInfos(
cameraManager: camera.CameraManager,
devices: Array<camera.CameraDevice>
): Array<camera.CameraConcurrentInfo> {
try {
return cameraManager.getCameraConcurrentInfos(devices);
} catch (error) {
console.error(`Failed to probe concurrent camera infos: ${JSON.stringify(error)}`);
return [];
}
}
private findCameraDeviceByPosition(
cameras: Array<camera.CameraDevice>,
position: camera.CameraPosition
): camera.CameraDevice | undefined {
const defaultDevice = cameras.find((device: camera.CameraDevice) =>
device.cameraPosition === position && device.cameraType === camera.CameraType.CAMERA_TYPE_DEFAULT
);
if (defaultDevice) {
return defaultDevice;
}
return cameras.find((device: camera.CameraDevice) => device.cameraPosition === position);
}
private getCameraDevicesByPosition(
cameras: Array<camera.CameraDevice>,
position: camera.CameraPosition
): Array<camera.CameraDevice> {
const preferredDevices = cameras.filter((device: camera.CameraDevice) =>
device.cameraPosition === position && device.cameraType === camera.CameraType.CAMERA_TYPE_DEFAULT
);
const fallbackDevices = cameras.filter((device: camera.CameraDevice) =>
device.cameraPosition === position && device.cameraType !== camera.CameraType.CAMERA_TYPE_DEFAULT
);
return preferredDevices.concat(fallbackDevices);
}
private findConcurrentCameraPair(
cameraManager: camera.CameraManager,
cameras: Array<camera.CameraDevice>
): ConcurrentCameraPair {
const backDevices = this.getCameraDevicesByPosition(cameras, camera.CameraPosition.CAMERA_POSITION_BACK);
const frontDevices = this.getCameraDevicesByPosition(cameras, camera.CameraPosition.CAMERA_POSITION_FRONT);
for (const frontDevice of frontDevices) {
for (const backDevice of backDevices) {
const concurrentInfos = this.safeGetCameraConcurrentInfos(cameraManager, [frontDevice, backDevice]);
if (concurrentInfos.length > 0) {
const concurrentPair: ConcurrentCameraPair = {
backDevice: backDevice,
frontDevice: frontDevice,
concurrentInfos: concurrentInfos
};
return concurrentPair;
}
}
}
const fallbackPair: ConcurrentCameraPair = {
backDevice: backDevices[0],
frontDevice: frontDevices[0],
concurrentInfos: []
};
return fallbackPair;
}
private getOfficialConcurrentCameraPair(cameraManager: camera.CameraManager): ConcurrentCameraPair {
const backDevice = this.safeGetCameraDevice(
cameraManager,
camera.CameraPosition.CAMERA_POSITION_BACK,
camera.CameraType.CAMERA_TYPE_DEFAULT
);
const frontDevice = this.safeGetCameraDevice(
cameraManager,
camera.CameraPosition.CAMERA_POSITION_FRONT,
camera.CameraType.CAMERA_TYPE_DEFAULT
);
if (!backDevice || !frontDevice) {
const unsupportedPair: ConcurrentCameraPair = {
backDevice: backDevice,
frontDevice: frontDevice,
concurrentInfos: []
};
return unsupportedPair;
}
const concurrentInfos = this.safeGetCameraConcurrentInfos(cameraManager, [frontDevice, backDevice]);
const officialPair: ConcurrentCameraPair = {
backDevice: backDevice,
frontDevice: frontDevice,
concurrentInfos: concurrentInfos
};五、把单摄会话写成可释放、可重进、可扩展
相机页常见的隐性 bug 是第一次能打开,切到别的页再回来就失败。原因通常是旧 session、output 或 input 没释放干净。项目把单摄资源分别保存,并在 teardownDualPreview 里统一释放,所以单摄会话可以多次进入、多次退出。
另外,单摄模式仍然保留镜头选择、变焦、闪光灯等扩展点。因为这些控制项依赖的是当前 active PhotoSession,而不是"双摄"这个概念。只要单摄会话层次清晰,后面的控制能力可以直接接上。
本篇检查清单
- 单摄启动前检查权限、Surface、设备和 profile。
- CameraInput、PreviewOutput、PhotoOutput、PhotoSession 分别保存,便于释放和状态判断。
- PhotoSession 配置顺序符合 beginConfig、addInput/output、commitConfig、start。
- 并发能力为空时走单摄回退,而不是反复重试双摄。
- 正文配图包含运行结果、字段结构、会话代码和并发能力探测源码。
今日练习
- 在 ensureSinglePreview 中记录 activeRole,确认前后摄切换时日志正确。
- 临时模拟 concurrentInfos 为空,验证页面仍能进入单摄预览。
- 拍一张单摄照片后进入图库页,确认记录能出现在列表中。