概述
其实集群的概念很广泛。广义上,只要多个机器共同组成一个分布式系统,都可以叫集群。之前的主从复制、哨兵模式,也可以看成广义集群。Redis 这里说的集群,一般指 Redis Cluster。它主要解决的是存储空间不足的问题:把数据拆到多台机器上,每台机器只保存一部分数据。
哨兵模式解决的是可用性问题,但本质上还是主从节点都保存完整数据。只要数据全集超过单机能承受的内存,就需要引入分片。
分片
分片这个其实很形象,就像把数据一片一片分开。分片就是把数据拆成多份,分别放到不同节点上。
所以每一台机器上面的数据都是不一样的。
比如有 1TB 数据,可以这样拆:
- 2 台机器,每台大约存 512GB。
- 3 台机器,每台大约存 300 多 GB。
- 4 台机器,每台大约存 256GB。
机器越多,每台机器承担的数据越少。但是实际部署时,每个存数据的主节点通常还要配从节点,用来提高可用性。所以扩容的时候并不是只需要一台,可能需要很多台机器。对于数据存放的思路,有以下几种算法可以实现。
哈希求余
哈希求余的思路是:
txt
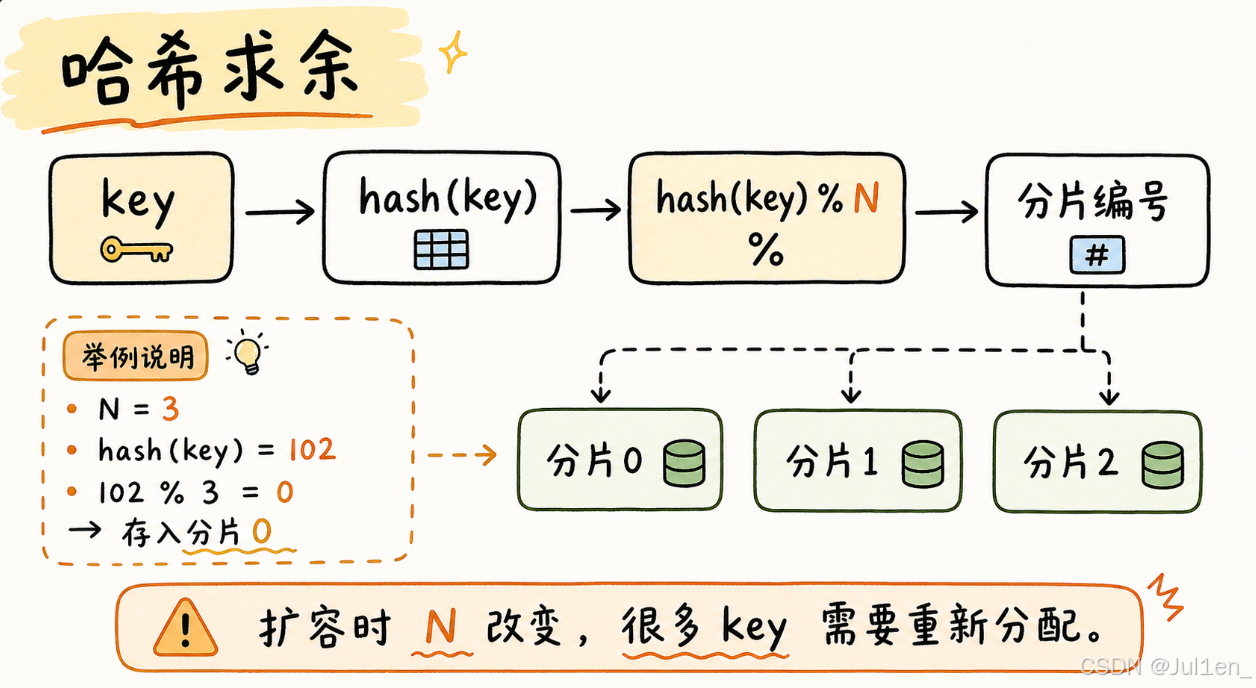
hash(key) % NN 是分片数量。Redis 的数据都是 key-value 结构,所以可以先对 key 做 hash,再对分片数量求余,得到应该放到哪个分片。查询时也一样:key 不变,hash 函数不变,算出来的分片编号也不变。
这种方式简单,但是扩容很麻烦。因为一旦分片数量 N 改了,hash(key) % N 的结果会整体变化,很多数据都要重新搬运。
一致性哈希
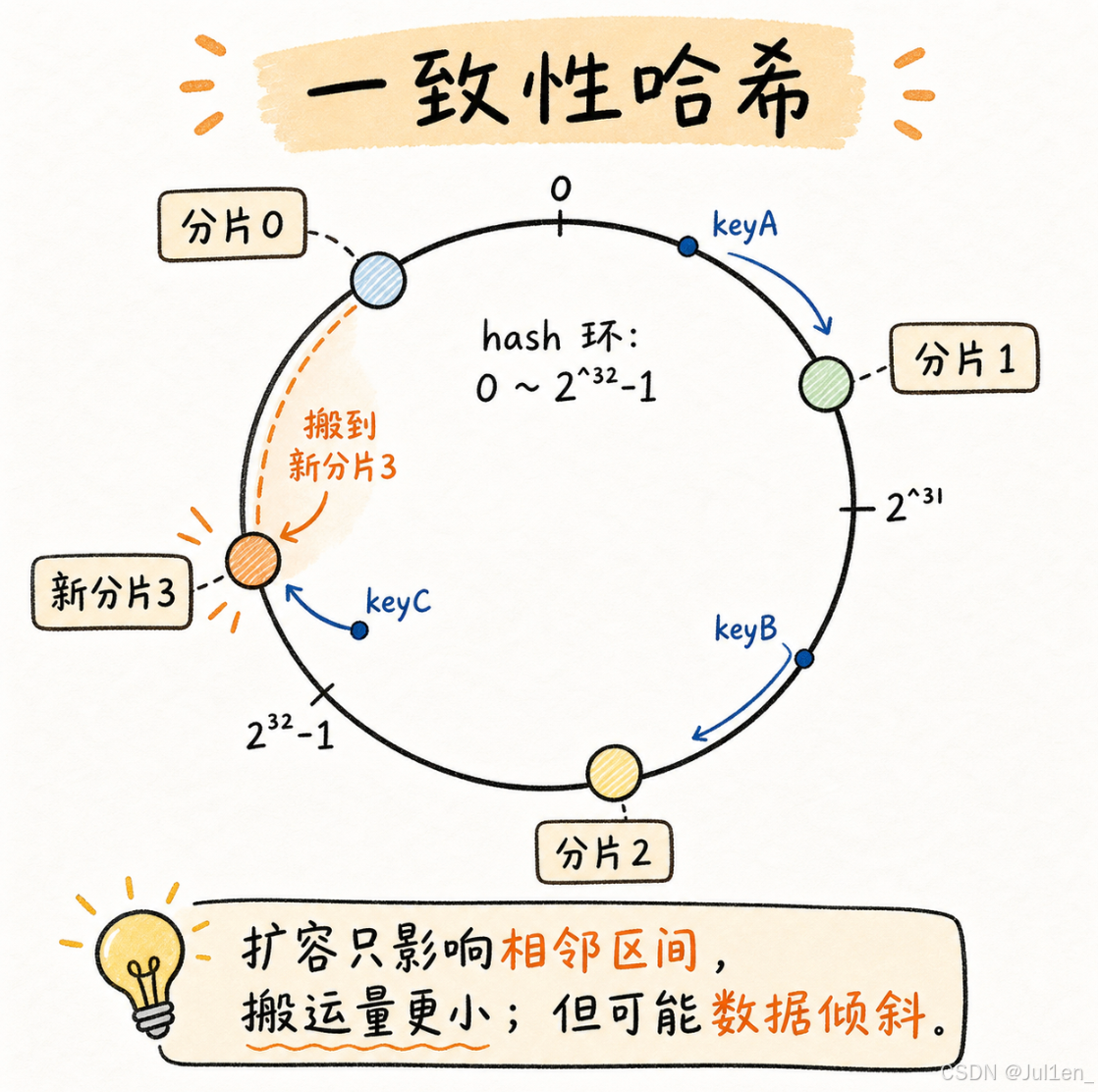
一致性哈希把 hash 空间看成一个环,比如范围是 0 ~ 2^32 - 1。分片也落在这个环上,key 计算 hash 后,按环上的位置往顺时针跑,找到第一个分片的分割点,那就属于当前的分片。
就像图里的,原本只有分片 0、1、2。若新增分片 3,则扩容时不用让所有 key 重新分布,只需要搬动新节点影响到的一段数据。图中的 keyC 原本属于分片 0,现在顺时针跑遇到的第一个分片是 3,那么它就属于新分片 3 的范围。
优点:
- 比哈希求余的数据搬运量小。
- 扩容成本更低。
但有个问题是,如果节点分布不好,分片上的数据量可能不均匀,专业说法叫数据倾斜。
Redis 哈希槽
Redis Cluster 真正采用的是哈希槽方案,将哈希求余和一致性哈希结合起来。
txt
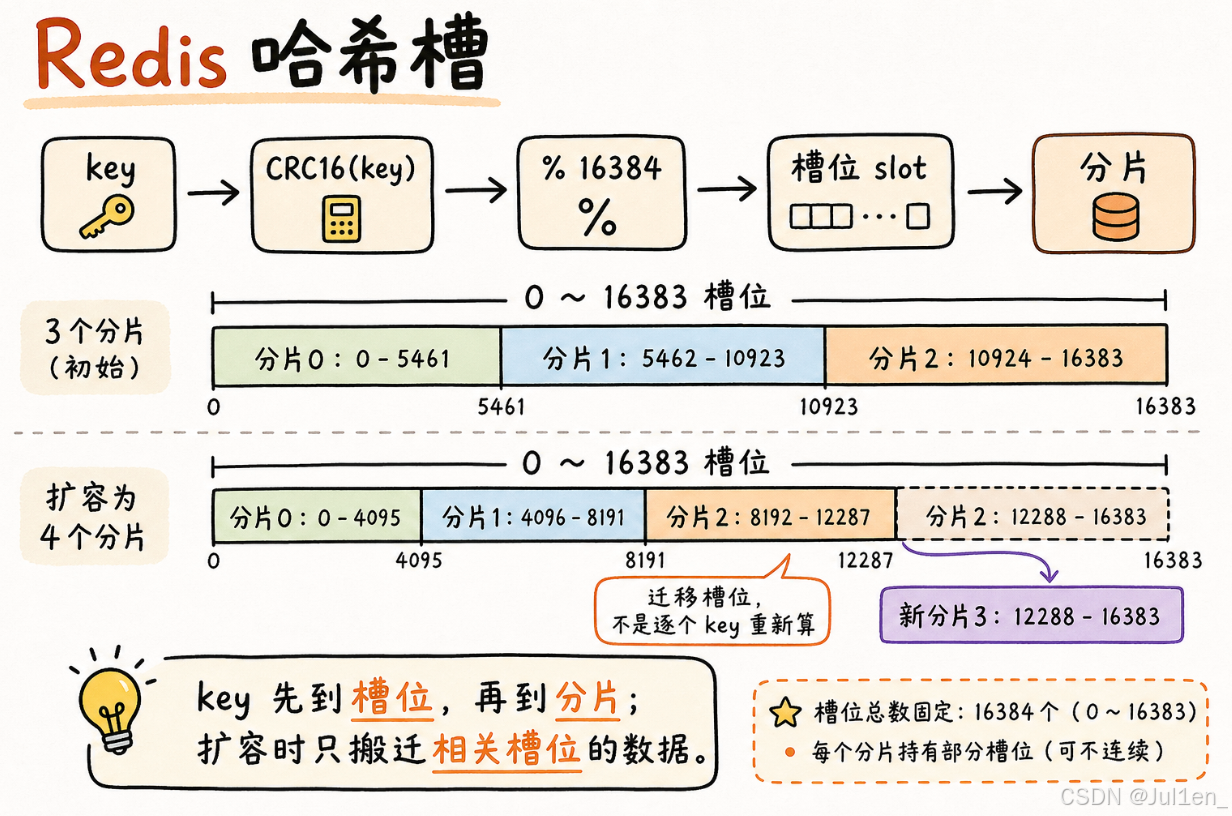
slot = CRC16(key) % 16384Redis Cluster 固定有 16384 个槽位,也就是 2^14 个。key 不是直接映射到分片,而是先映射到槽位,再由槽位映射到分片。
流程可以理解为:key -> 槽位 -> 分片。
扩容或迁移时,不需要按单个 key 去重新分配,而是迁移一部分槽位。
只有这些槽位对应的数据需要搬运,所以比简单的哈希求余更适合扩容。
例如 3 个分片时,可以大致这样分:
txt
0 号分片:[0, 5461]
1 号分片:[5462, 10923]
2 号分片:[10924, 16383]如果扩成 4 个分片,也可以从原来的几个分片中各拿出一部分槽位给新分片。这样每个分片大约持有 4096 个槽位。
槽位数量
Redis 使用 16384 个槽位,是一个折中的数量。可以简单算一下它的大小,看着很多,其实没占多少空间:
txt
16384 bit = 2048 byte = 2KB如果槽位太少,每个分片能分到的槽位少,数据均衡性不容易保证,某些槽位可能有很多 key,某些槽位也可能没有 key。
如果槽位太多,节点之间通信的元数据会变大。因为 Redis 之间需要通过心跳包检测各个节点的状态,如果槽位数量变成 65536,位图就会变成 8KB。虽然看着也不大,但是在这种频繁发送心跳包的场景里,网络带宽负担还是比较明显。
另外,每个节点需要表示自己持有哪些槽位,通常会用位图表示:第 i 位为 1,表示这个节点持有第 i 个槽位;第 i 位为 0,表示不持有。注意这里表示的是节点是否持有槽位,不是这个槽位里有没有 key。
总结
Redis Cluster 的核心是分片。主从复制和哨兵主要解决可用性,集群模式进一步解决单机存储容量限制。