1. Ubuntu 20.04 配置有线网卡 IP
让电脑和 Mid-360S 在同一个局域网内互相通信。
Mid-360S 默认采用静态 IP。其默认地址规则为:
雷达 IP = 192.168.1.1XX其中 XX 是雷达序列号最后两位数字。
例如:
| 序列号末两位 | 雷达默认 IP |
|---|---|
| 05 | 192.168.1.105 |
| 32 | 192.168.1.132 |
| 88 | 192.168.1.188 |
电脑网口建议设置为:
192.168.1.50
子网掩码:255.255.255.0这是 Mid-360S 用户手册给出的首次直连配置方式。
1.确认有线网卡名称
打开终端,输入
bash
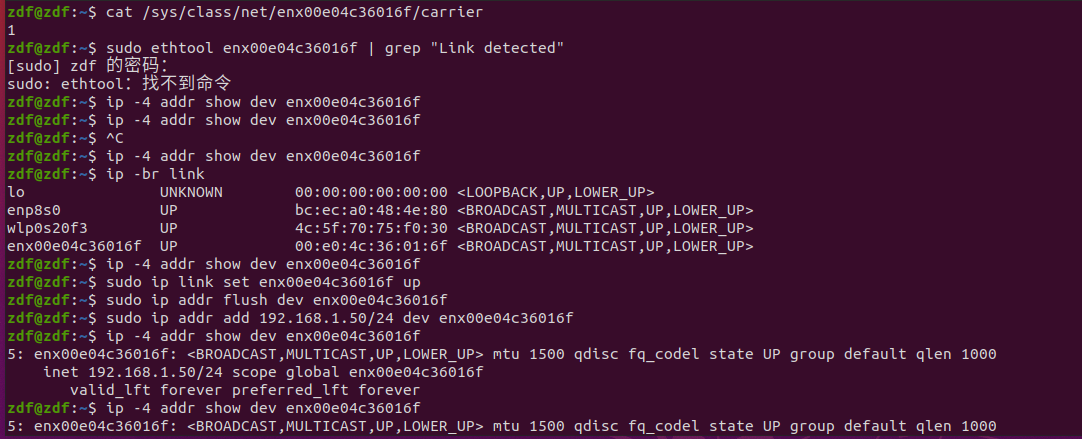
ip -br link输出
bash
lo UNKNOWN 00:00:00:00:00:00 <LOOPBACK,UP,LOWER_UP>
enp8s0 UP bc:ec:a0:48:4e:80 <BROADCAST,MULTICAST,UP,LOWER_UP>
wlp0s20f3 UP 4c:5f:70:75:f0:30 <BROADCAST,MULTICAST,UP,LOWER_UP>
enx00e04c36016f UP 00:e0:4c:36:01:6f <BROADCAST,MULTICAST,UP,LOWER_UP> 拔掉电脑自带网线后
输入
bash
ip -br link输出
bash
lo UNKNOWN 00:00:00:00:00:00 <LOOPBACK,UP,LOWER_UP>
enp8s0 DOWN bc:ec:a0:48:4e:80 <NO-CARRIER,BROADCAST,MULTICAST,UP>
wlp0s20f3 UP 4c:5f:70:75:f0:30 <BROADCAST,MULTICAST,UP,LOWER_UP>
enx00e04c36016f UP 00:e0:4c:36:01:6f <BROADCAST,MULTICAST,UP,LOWER_UP> 雷达连接使用的网卡是 enx00e04c36016f。
原因是拔掉另一根电脑网线后:
enp8s0 DOWN
enx00e04c36016f UP说明:
enp8s0 原来连接的另一根网线,当前已断开
enx00e04c36016f 仍保持物理连接,就是连接 Mid-360S 的 USB 转网口
wlp0s20f3 Wi-Fi,暂时不要改接下来所有雷达网络命令中的网卡名,都使用:
enx00e04c36016f2.确认雷达物理链路正常
先执行:
cat /sys/class/net/enx00e04c36016f/carrier如果输出:
1说明雷达与电脑之间的网线物理连接已经建立。
也可以继续执行:
sudo ethtool enx00e04c36016f | grep "Link detected"正常应显示:
Link detected: yes如果提示没有 ethtool,先不用管,carrier 输出为 1 就可以继续。
3:查看这个网卡当前是否已有 IP
执行:
ip -4 addr show dev enx00e04c36016f发现没有输出。重点看里面是否存在类似,没有输出也不妨碍下面的进程,继续往下进行:
inet xxx.xxx.xxx.xxx/xx其实不管当前有没有 IP,下面我们都将它临时设置为雷达调试所需的:
192.168.1.50/244:给雷达网卡配置静态 IP
直接逐行执行下面命令:
sudo ip link set enx00e04c36016f up
sudo ip addr flush dev enx00e04c36016f
sudo ip addr add 192.168.1.50/24 dev enx00e04c36016f
ip -4 addr show dev enx00e04c36016f最后一条命令执行后,正常应看到:
inet 192.168.1.50/24 scope global enx00e04c36016f完整结果:
bash
5: enx00e04c36016f: <BROADCAST,MULTICAST,UP,LOWER_UP> mtu 1500 qdisc fq_codel state UP group default qlen 1000
inet 192.168.1.50/24 scope global enx00e04c36016f
valid_lft forever preferred_lft forever这就说明电脑上的雷达网口 IP 已经配置成功。
说明:
enx00e04c36016f已确认是雷达连接网口;- 电脑端静态 IP 已成功设置为
192.168.1.50; LOWER_UP表示以太网物理链路已经建立,雷达线束至少在网络物理连接层面是通的。
下一步是:找到雷达实际 IP,并 ping 通它。
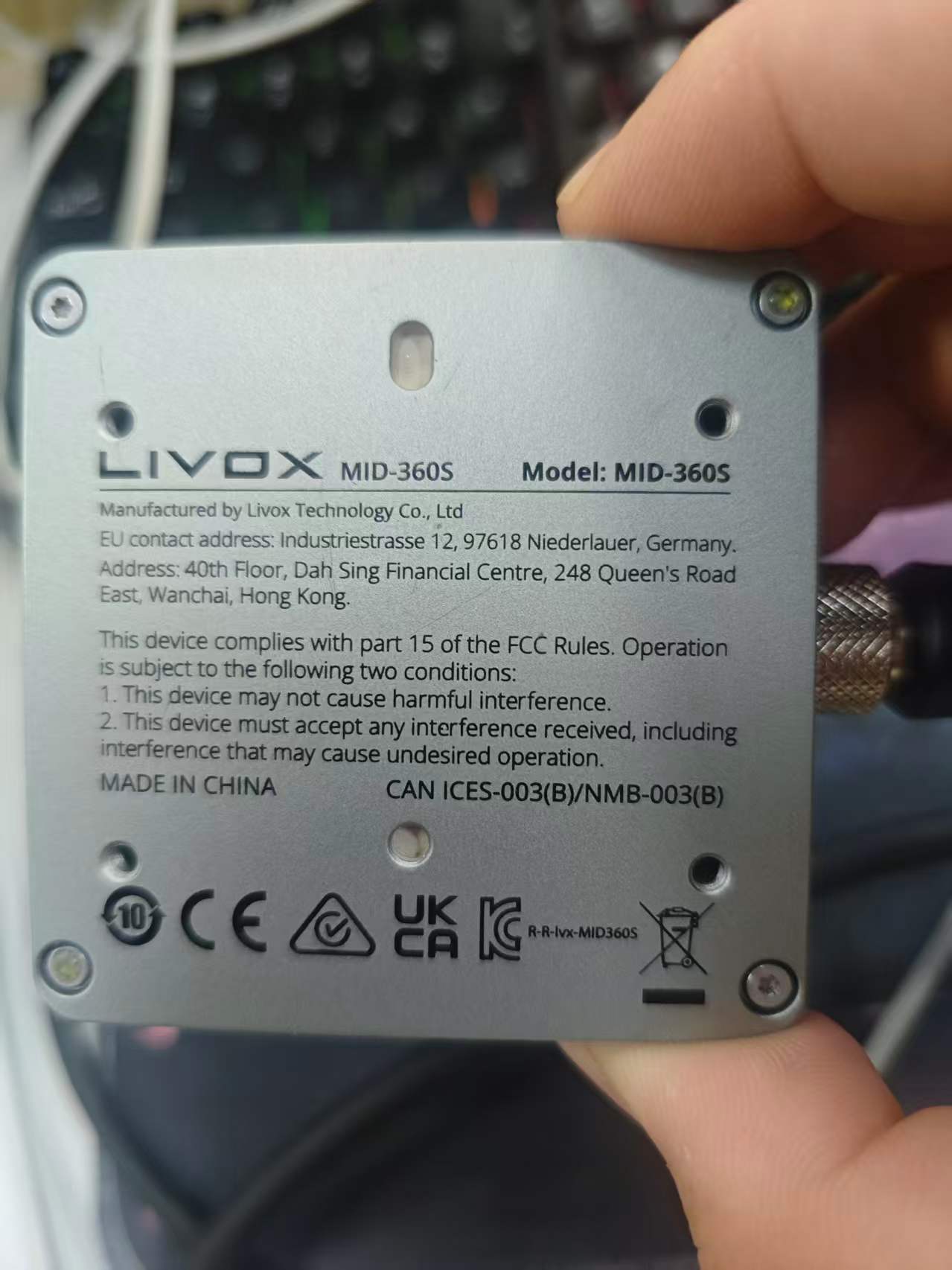
5. 先看雷达本体标签

-
雷达确实是 Livox MID-360S,不是老款 MID-360。
-
雷达侧面二维码标签下方可读到编号:
ARMCP160034649
末两位是 49。按照 Mid-360S 出厂默认静态 IP 规则,当前首先尝试的雷达地址应为:
192.168.1.149你电脑连接雷达的网口已经正确设置为:
网卡:enx00e04c36016f
电脑 IP:192.168.1.50/24官方手册规定:Mid-360S 默认静态 IP 为 192.168.1.1XX,XX 为设备序列号最后两位;默认子网掩码为 255.255.255.0,首次连接电脑端设置为 192.168.1.50。
6先把雷达放好,不要继续手持调试
从照片看雷达已经通电。现在将雷达放在桌面上,蓝色光学窗口朝上,周围不要有遮挡物:
蓝色光学窗口
↑
┌────────────┐
│ MID-360S │
└────────────┘
平放在桌面上注意:
- 不要用手覆盖蓝色光学窗口;
- 不要让另一个激光雷达正对着它扫描;
- 不要扭转已经接好的黑色线缆;
- 调试阶段蓝白等功能线继续悬空并绝缘;
- RJ45 只接普通网口,不接 PoE 供电设备。
Mid-360S 的工作电压范围是 9--27 V DC ,推荐 12 V ;正常功耗约 6.5 W ,在常温下启动功率可达到约 18 W 并持续约 8 秒。若你当前使用的不是确认过极性的 9--27 V 直流电源,应先断电检查供电。
7.现在测试默认 IP:192.168.1.149
你当前电脑网口已经配好,不需要重新设置 IP。
直接执行下面三条命令:
cat /sys/class/net/enx00e04c36016f/carrier
ping -I enx00e04c36016f -c 4 192.168.1.149
ip neigh show dev enx00e04c36016f1. 第一条命令的正常结果
cat /sys/class/net/enx00e04c36016f/carrier输出:
1表示电脑和雷达之间的物理网线连接正常。
你之前的输出中已经有:
<UP,LOWER_UP>所以这一项大概率已经没问题。
2. 第二条命令的正常结果
ping -I enx00e04c36016f -c 4 192.168.1.149若雷达仍使用出厂默认地址,会看到类似,这个确实看到了:
bash
PING 192.168.1.149 (192.168.1.149) from 192.168.1.50 enx00e04c36016f: 56(84) bytes of data.
64 字节,来自 192.168.1.149: icmp_seq=1 ttl=255 时间=2.39 毫秒
64 字节,来自 192.168.1.149: icmp_seq=2 ttl=255 时间=1.73 毫秒
64 字节,来自 192.168.1.149: icmp_seq=3 ttl=255 时间=1.97 毫秒这表示:
雷达供电正常
电脑与雷达的网线链路正常
电脑 IP 配置正常
雷达当前 IP 为 192.168.1.1493. 第三条命令可能出现的结果
ip neigh show dev enx00e04c36016f若看到:
bash
192.168.1.149 lladdr 88:29:85:a3:fd:bc REACHABLE或者:
192.168.1.149 lladdr xx:xx:xx:xx:xx:xx STALE都说明电脑已经通过这个网口识别到了雷达。
成功了,你的 MID-360S 已经完成网络层连通测试。
你现在的状态是:
雷达型号:Livox MID-360S
雷达编号:ARMCP160034649
雷达 IP:192.168.1.149
电脑雷达网口:enx00e04c36016f
电脑网口 IP:192.168.1.50/24
网络状态:物理链路正常,Ping 正常,邻居表可识别雷达你的结果中:
carrier = 1表示网线物理连接正常;
64 字节,来自 192.168.1.149表示电脑已经能访问雷达;
192.168.1.149 lladdr 88:29:85:a3:fd:bc REACHABLE表示电脑已经识别到雷达设备。
4.先固定雷达访问路由
你刚才使用 ping -I enx00e04c36016f 强制走了雷达网口。但 Livox Viewer 2 不一定会采用同样的强制方式,因此先给雷达增加一条明确路由,避免 Wi-Fi 或其他网口干扰。
执行:
sudo ip route replace 192.168.1.149/32 dev enx00e04c36016f src 192.168.1.50检查路由:
ip route get 192.168.1.149正常应显示:
192.168.1.149 dev enx00e04c36016f src 192.168.1.50再做一次不指定网卡的测试:
ping -c 4 192.168.1.149如果仍然能收到回复,说明后续 Viewer 和 ROS 访问雷达时的网络路径基本正确。
当前通过
ip addr add和ip route replace设置的是临时配置,电脑重启或重新插拔 USB 网卡后可能失效。等 Viewer 和 ROS 调试完成后,再将它设置成永久配置。
二、下载 Livox Viewer 2 - Linux
1. 保持当前连接方式不变
现在不要断开:
- MID-360S 电源;
- RJ45 网线;
- USB 转网口;
- 雷达航空插头。
雷达保持放在桌面上,蓝色光学窗口不要被手或线缆遮挡。
2. 从官网下载安装包
在 Ubuntu 浏览器中进入 Livox Mid-360S Downloads 页面,网址Downloads - Mid-360S LiDAR Sensor - Livox找到:
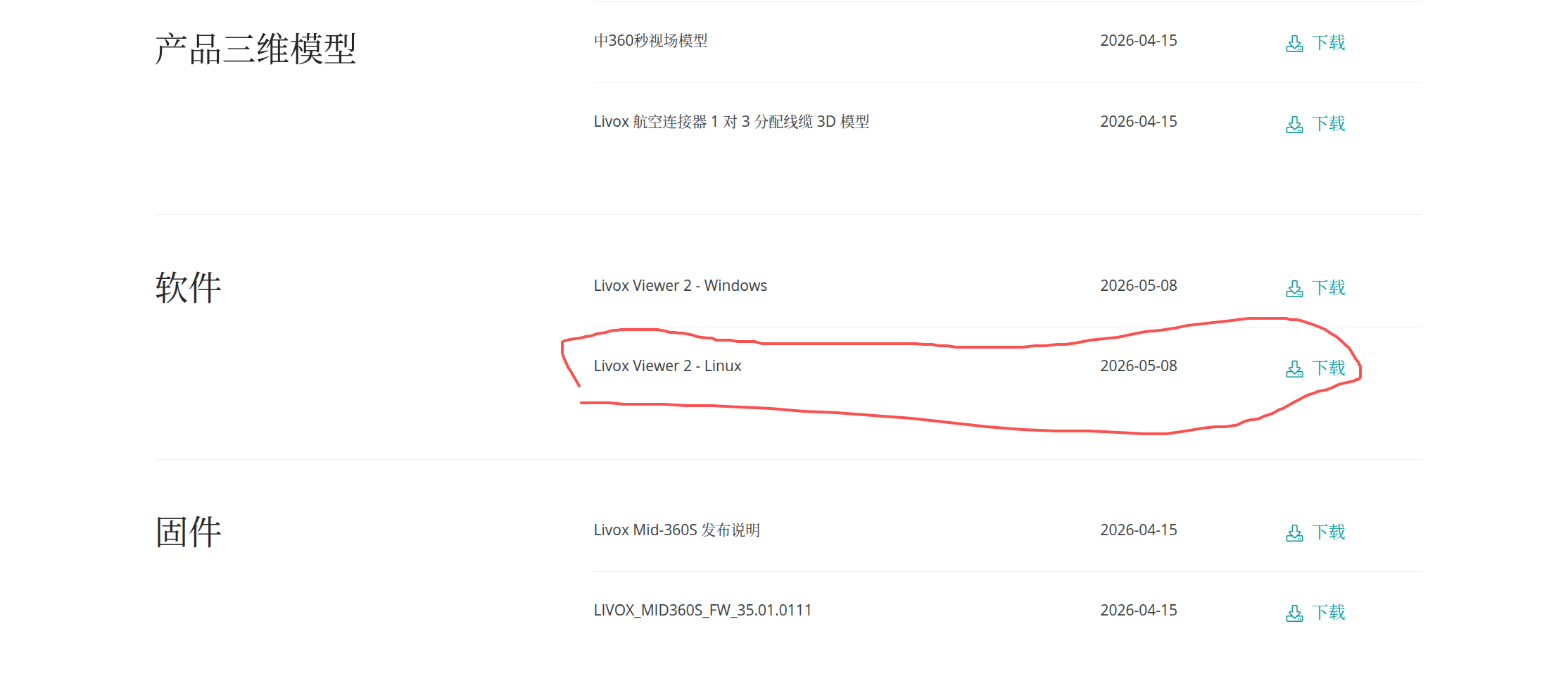 下载 Linux 版本。官方页面已列出适用于 Mid-360S 的 Linux 版 Viewer。
下载 Linux 版本。官方页面已列出适用于 Mid-360S 的 Linux 版 Viewer。
下载完成后,在终端中查看文件:
三、解压并启动 Livox Viewer 2
下载文件是 .zip
执行:
bash
mkdir -p ~/LivoxViewer2
cd "$(xdg-user-dir DOWNLOAD)"
unzip LViewer2_2.5.9_Linux.zip -d ~/LivoxViewer2找到启动脚本

启动:
bash
chmod +x ~/LivoxViewer2/Viewer2_2.5.9_Linux/LivoxViewer2.sh
cd ~/LivoxViewer2/Viewer2_2.5.9_Linux
./LivoxViewer2.sh四、Viewer 打开后具体怎么操作
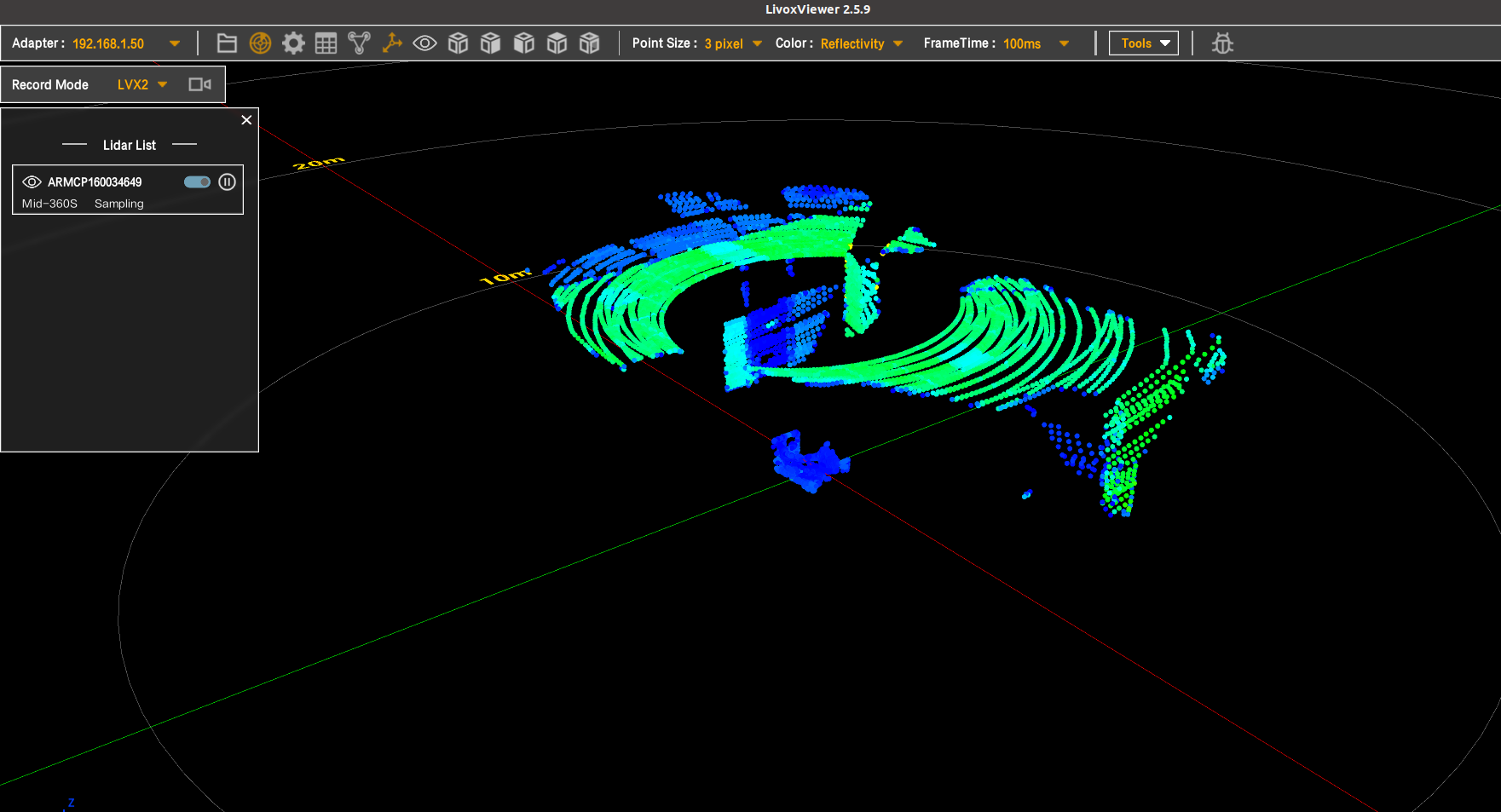
1. 查看是否发现设备
软件打开后,在左侧或设备列表区域查看是否出现:
MID-360S或者设备编号:
ARMCP160034649设备地址应显示为:
192.168.1.149如果设备出现,说明 Viewer 已成功发现雷达。
2. 连接雷达
选中设备后,点击类似以下功能按钮:
Connect
Start
Sampling
Play具体文字随 Viewer 版本界面可能略有不同。
连接成功后,主窗口中应出现实时三维点云。
3. 正常点云应该是什么样
雷达平放在桌面时,你应该看到:
- 桌面或地面形成较连续的平面点云;
- 周围墙面、显示器、键盘等形成空间轮廓;
- 轻轻移动一个纸箱或手臂时,点云会实时变化。
这一步的目标不是建图,而是确认:
雷达能够正常输出点云
光学扫描部分正常
网络数据传输稳定
设备没有报错4. 在 Viewer 中记录三项信息
进入设备信息区域后,记录:
设备型号:MID-360S
设备 IP:192.168.1.149
固件版本:________暂时不要:
- 修改雷达 IP;
- 升级固件;
- 修改扫描模式;
- 修改外参;
- 接入 FAST-LIVO2。
五、下载最新 Livox-SDK2和livox_ros_driver2
1. 下载 SDK2
为了不影响你以前可能存在的旧工程,这里使用单独目录:
cd ~
git clone https://github.com/Livox-SDK/Livox-SDK2.git编译并安装 SDK
cd ~/Livox-SDK2
mkdir build
cd build
cmake ..
make -j
sudo make install
sudo ldconfig编译完成后检查库文件是否已安装:
ldconfig -p | grep livox显示

2.建立独立 ROS 测试工作空间
你后面还要继续使用 FAST-LIVO2,因此先不要把驱动直接塞进现有的 FAST-LIVO2 工作空间。单独建立一个 MID-360S 驱动测试空间:
mkdir -p ~/ws_livox_mid360s/src
cd ~/ws_livox_mid360s/src
git clone https://github.com/Livox-SDK/livox_ros_driver2.git确认下载的是支持 MID-360S 的版本:
ls ~/ws_livox_mid360s/src/livox_ros_driver2/config/MID360s_config.json
ls ~/ws_livox_mid360s/src/livox_ros_driver2/launch_ROS1/*MID360s*正常应显示:
/home/zdf/ws_livox_mid360s/src/livox_ros_driver2/config/MID360s_config.json
/home/zdf/ws_livox_mid360s/src/livox_ros_driver2/launch_ROS1/msg_MID360s.launch
/home/zdf/ws_livox_mid360s/src/livox_ros_driver2/launch_ROS1/rviz_MID360s.launch当前官方仓库中确实存在这些 MID-360S 专用配置与 ROS1 启动文件。
3、编译 livox_ros_driver2
执行:
cd ~/ws_livox_mid360s/src/livox_ros_driver2
source /opt/ros/noetic/setup.bash
./build.sh ROS1编译过程中不要同时 source 你的 FAST-LIVO2 工作空间,也不要运行其他 Livox 驱动。
编译结束后检查工作空间是否生成:
ls ~/ws_livox_mid360s/devel/setup.bash若能看到该文件,说明 ROS 驱动编译完成。
4.、修改 MID-360S 配置文件
你的实际参数已经确定为:
电脑网口 IP:192.168.1.50
雷达 IP: 192.168.1.149官方 MID360s_config.json 默认写的是:
"host_ip" : "192.168.1.5"以及:
"ip" : "192.168.1.12"因此必须改成你的真实地址。
4.1. 备份原配置文件
cd ~/ws_livox_mid360s/src/livox_ros_driver2/config
cp MID360s_config.json MID360s_config.json.bak4.2. 自动替换 IP
执行:
sed -i 's/"host_ip" : "192\.168\.1\.5"/"host_ip" : "192.168.1.50"/' MID360s_config.json
sed -i 's/"ip" : "192\.168\.1\.12"/"ip" : "192.168.1.149"/' MID360s_config.json4.3. 检查修改结果
grep -nE '"host_ip"|"ip"' MID360s_config.json正常应看到:
"host_ip" : "192.168.1.50",
"ip" : "192.168.1.149",不要修改:
"Mid360s"也不要改动端口号、扫描模式或外参参数。
5、确认电脑网口配置仍然存在
你之前用 ip addr add 配置的是临时 IP。只要没有重启电脑或拔掉 USB 网卡,一般仍会保留。
执行:
ip -4 addr show dev enx00e04c36016f应能看到:
inet 192.168.1.50/24如果没有这一行,重新设置:
sudo ip link set enx00e04c36016f up
sudo ip addr flush dev enx00e04c36016f
sudo ip addr add 192.168.1.50/24 dev enx00e04c36016f再确认雷达仍可访问:
ping -c 3 192.168.1.149运行 ROS 前必须关闭 Livox Viewer
6、启动 RViz 查看 ROS 点云
配置文件改好、Viewer 关闭后,执行:
source /opt/ros/noetic/setup.bash
source ~/ws_livox_mid360s/devel/setup.bash
roslaunch livox_ros_driver2 rviz_MID360s.launchrviz_MID360s.launch 用于连接 MID-360S 并在 RViz 中显示 PointCloud2 点云;点云默认发布频率为 10.0 Hz。
如果 RViz 打开后暂时没有显示点云,检查左侧:
Global Options → Fixed Frame将其设置为:
livox_frame7、确认 ROS 点云和 IMU 话题
保持驱动和 RViz 正在运行,另开一个终端:
source /opt/ros/noetic/setup.bash
source ~/ws_livox_mid360s/devel/setup.bash
rostopic list | grep livox继续检查:
rostopic hz /livox/lidar
rostopic hz /livox/imu正常目标是:
/livox/lidar 约 10 Hz
/livox/imu 能持续输出频率再查看一帧 IMU:
rostopic echo -n 1 /livox/imu你下次只为了在 RViz 里查看 MID-360S 点云,流程可以简化为:
source /opt/ros/noetic/setup.bash
source ~/ws_livox_mid360s/devel/setup.bash
roslaunch livox_ros_driver2 rviz_MID360s.launch但有一个前提:电脑连接雷达的网卡必须仍然是 192.168.1.50/24。
你之前使用的是临时配置:
sudo ip addr add 192.168.1.50/24 dev enx00e04c36016f这种配置在重启电脑、拔插 USB 转网口或 NetworkManager 重新管理网卡后可能失效。因此,下次启动前先检查一次:
ip -4 addr show dev enx00e04c36016f如果看到:
inet 192.168.1.50/24就可以直接启动 ROS 驱动。
如果没有看到,则要先重新配置 IP:
sudo ip link set enx00e04c36016f up
sudo ip addr flush dev enx00e04c36016f
sudo ip addr add 192.168.1.50/24 dev enx00e04c36016f
ping -c 3 192.168.1.149然后再启动:
source /opt/ros/noetic/setup.bash
source ~/ws_livox_mid360s/devel/setup.bash
roslaunch livox_ros_driver2 rviz_MID360s.launch