GigE Vision:半导体X光检测的高速图像传输协议
核心速览 :GigE Vision是AIA制定的工业机器视觉以太网标准,在中盾S700M中负责16位高清X射线图像实时传输 ,通过GVCP控制面+GVSP数据面 双协议架构,结合GenICam通用接口实现设备统一控制与2μm级图像无损传输,是S700M高精度检测的关键技术支撑。
一、协议本质与核心架构
1. 基本定义与定位
GigE Vision(千兆以太网视觉)是自动化成像协会(AIA) 于2006年发布的工业相机接口标准,基于IEEE 802.3以太网 与UDP/IP协议栈 ,专为机器视觉应用设计,实现未压缩高分辨率图像的长距离高速传输。
在S700M中,GigE Vision承担X光探测器与上位机间的16位图像数据传输 ,保障2μm级超高分辨率图像无丢失、低延迟传输,是实现半导体封装内部缺陷检测的基础。
2. 双协议核心架构(GVCP+GVSP)
| 协议模块 | 全称 | 核心功能 | 传输特点 | S700M应用场景 |
|---|---|---|---|---|
| GVCP | GigE Vision Control Protocol | 设备发现、IP配置、参数读写、事件通知、丢包重传请求 | 低带宽控制流,基于UDP | 探测器参数设置(曝光时间、增益)、CT扫描同步控制 |
| GVSP | GigE Vision Stream Protocol | 图像数据传输、像素格式定义、帧同步 | 高带宽数据流,基于UDP | 16位X射线图像实时传输,支持单帧/连续采集模式 |
二、GenICam集成:统一控制的关键
GigE Vision深度集成GenICam(Generic Interface for Cameras) 标准,这是S700M实现跨平台兼容与灵活控制的核心:
- GenApi:提供标准化参数访问接口,支持S700M探测器的所有可配置参数(如分辨率、曝光、帧率)
- GenTL:底层传输抽象层,实现Windows/Linux跨平台兼容,是Halcon等视觉软件与GigE相机通信的桥梁
- SFNC:标准特征命名规范,确保不同厂商设备参数命名一致,简化S700M上位机开发
关键机制:S700M探测器内置符合GenICam规范的XML描述文件,上位机通过解析该文件自动识别设备功能,无需针对特定硬件编写驱动。
三、S700M中的应用特性与优势
1. 核心应用场景
- CT扫描图像传输:360°旋转采集的16位断层图像实时传输,保障重建精度
- 缺陷检测数据采集:支持<10μm焊点空洞的图像细节传输,满足半导体封装检测需求
- 多模态数据同步:与EtherCAT运动控制协议协同,实现"运动-曝光-采集"精确同步
2. 技术优势(对比其他接口)
| 对比项 | GigE Vision(S700M) | USB3 Vision | Camera Link |
|---|---|---|---|
| 传输距离 | 100米(Cat5e/Cat6),适合实验室布局 | 3米,限制设备摆放 | 10米,需专用线缆 |
| 带宽 | 1Gbps(理论),支持16位图像高速传输 | 5Gbps,但距离受限 | 6.8Gbps,成本高 |
| 同步能力 | 支持PTP/IEEE1588与Action Command,微秒级同步 | 一般,适合单相机 | 优秀,需额外硬件 |
| 扩展性 | 单交换机可连接多台设备,支持分布式架构 | 有限,依赖USB hub | 差,需专用采集卡 |
| 成本 | 低(标准网线+网卡) | 中 | 高(专用线缆+采集卡) |
🚀 **CommunityToolkit.Mvvm
这是微软官方推荐的MVVM工具包 ,专门解决WPF/MVVM开发中重复写属性通知、命令、消息的痛点,也是你项目里正在用的核心库!
帮你偷懒,少写10倍代码!
不用手写 INotifyPropertyChanged 接口、不用手写 OnPropertyChanged、不用手写属性 get/set,一行标签自动生成全套MVVM代码。
项目里用到的 3 个核心功能
1. [ObservableProperty] → 自动生成属性(最常用)
原手写代码(10行)
csharp
private double _targetX;
public double TargetX
{
get => _targetX;
set => SetProperty(ref _targetX, value);
}用工具包(1行)
csharp
[ObservableProperty]
private double _targetX;✅ 自动生成:public double TargetX { get; set; } + 属性通知
✅ 命名规则:下划线小驼峰 _targetX → 大驼峰 TargetX
2. partial void OnXxxChanging → 属性赋值拦截
轴坐标限位的功能:
csharp
// 赋值前触发,可修改value
partial void OnTargetXChanging(ref double value)
{
value = Math.Max(0, Math.Min(value, 100));
}✅ 作用:UI输入数值 → 自动拦截 → 超限修正 → 再赋值
3. WeakReferenceMessenger → 模块解耦消息
LogMessage/StartScanMessage 就是用它:
csharp
// 发消息
WeakReferenceMessenger.Default.Send(new LogMessage("轴启动成功"));
// 收消息
WeakReferenceMessenger.Default.Register<LogMessage>(this, (_, msg) => {});✅ 轴控VM、日志VM、图像VM 互相不依赖,靠消息通信
五、必备基础API
| 代码 | 作用 |
|---|---|
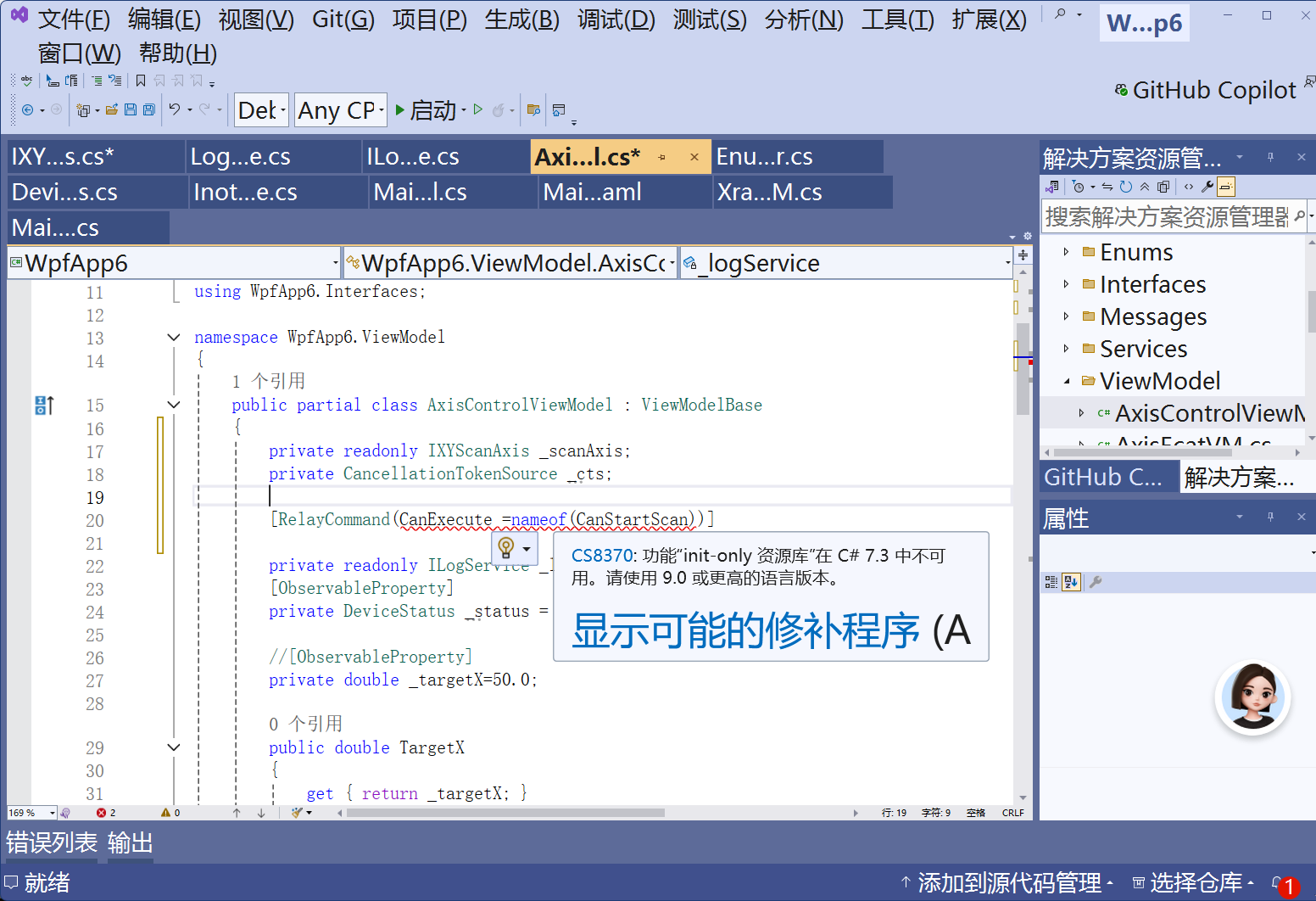
[ObservableProperty] |
自动生成属性+通知 |
SetProperty(ref 字段, 值) |
赋值+触发UI刷新 |
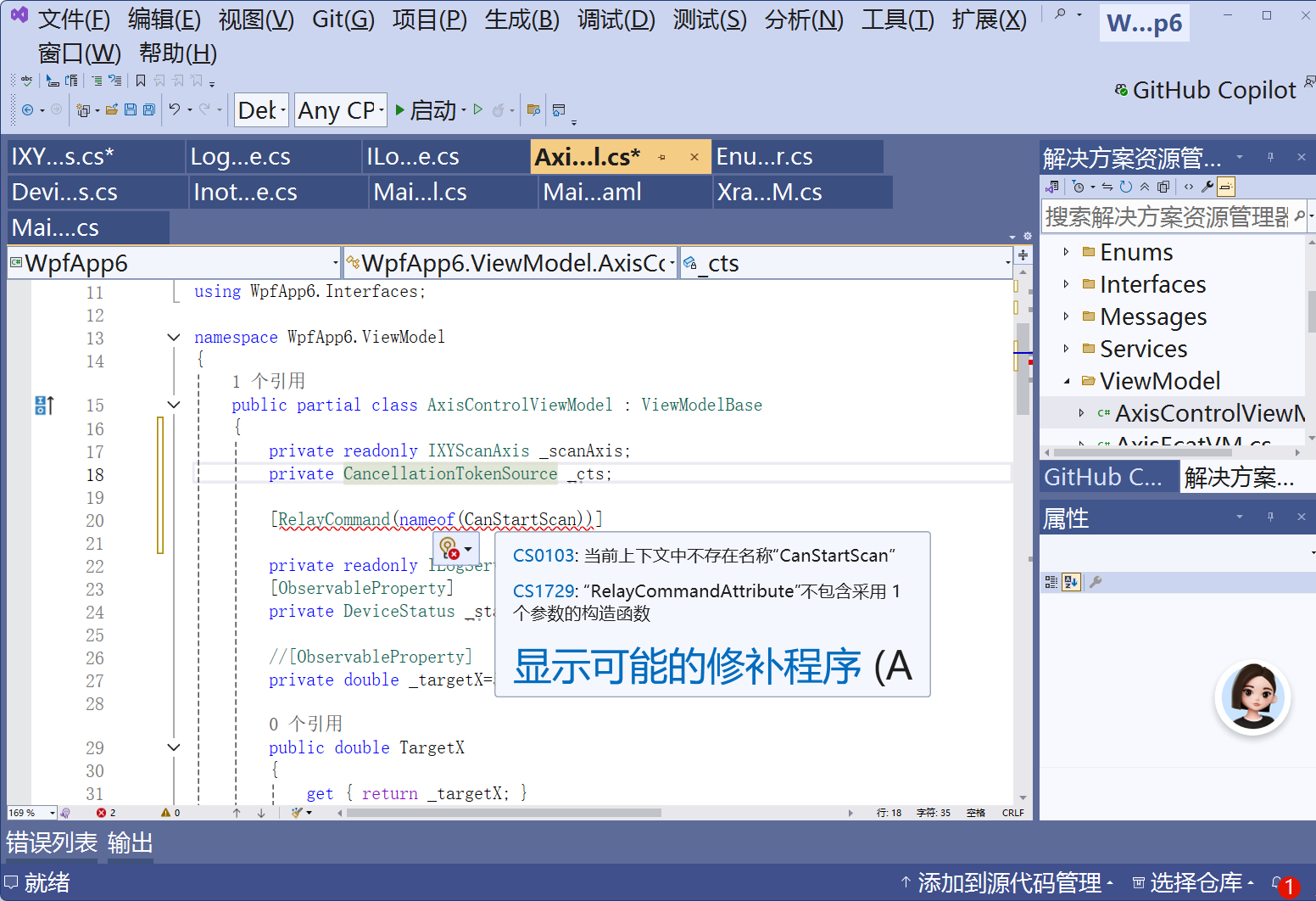
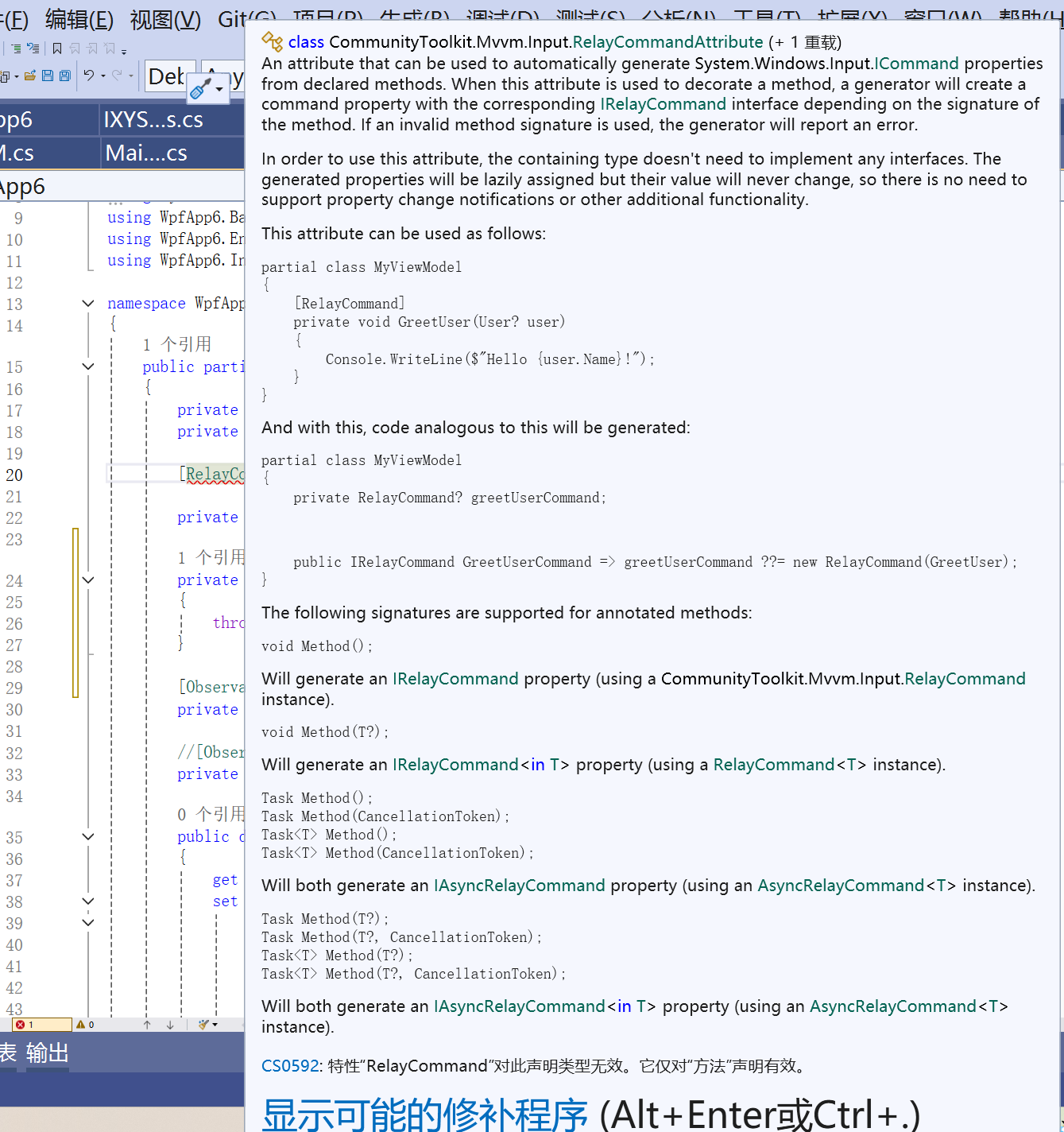
[RelayCommand] |
自动生成按钮命令 |
WeakReferenceMessenger |
跨VM消息通信 |