本周 GitHub 热门推荐
2026 年第 23 周 · 06.03
雷猴啊,朋友们!
又到了每周挖 GitHub 宝藏的时间。本期从具身机器人、AI Agent、3D 视觉三个方向各挑了几匹黑马,覆盖最火的新星和最实用的利器。坐稳,发车------

① Genesis-World
在电脑里训练机器人
⭐ 29,194 | 🔗 Genesis-Embodied-AI/genesis-world
今年具身智能领域最猛的黑马,不到一年冲到近三万星。
说白了就是个机器人仿真器。但它快到离谱------比现有方案快 10 到 80 倍,一张显卡同时跑几千个机器人训练。
你用自然语言说一句「厨房里,机械臂把杯子放进洗碗机」,它自动把场景搭好。不用手写一行环境配置。
🎯 什么时候用
想入门具身智能但买不起真机器人的学生、研究员。有显卡就能跑。
🛠 上手难度 · 中等
文档齐,但 3D 仿真坑多,遇到渲染问题要耐得住性子。Python 写策略,GPU 跑训练,整体比 Isaac Sim 轻量。

② LangChain
Agent 开发绕不开的老大哥
⭐ 138,397 | 🔗 langchain-ai/langchain
Agent 领域 138k Star 断崖式领先,一个能打的都没有。
一句话说明白:让你用 LLM 搭出真能干活的 AI 应用。
LangChain 管工具调用、记忆管理、RAG,它兄弟 LangGraph 管复杂工作流编排。两个搭配,覆盖 80% 的 Agent 开发场景。
🎯 什么时候用
你在做任何 AI Agent------小到聊天机器人,大到企业级自动化流水线,都绕不开它。
🛠 上手难度 · 入门低、精通高
API 对新手友好,但 Chain / Agent / Tool 之间的关系要踩几个坑才能搞清。文档很长但不乱,社区问答基本能解所有问题。
③ 3D Gaussian Splatting
一堆照片 → 一个三维世界
⭐ 22,216 | 🔗 graphdeco-inria/gaussian-splatting
SIGGRAPH 2023 最佳论文,两年后依然是三维重建的绝对顶流。
拍一堆照片丢进去,还你一个能转着看、能放大缩小的 3D 场景。比 NeRF 快太多了------训练快、渲染 30 帧以上实时跑。
原理是把场景拆成几百万个彩色椭球体,不像 NeRF 是个黑盒。所以建出来的模型可编辑、可裁剪、能和其他场景拼在一起。
🎯 什么时候用
做三维重建、VR/AR、数字孪生、影视特效,这玩意儿现在基本是标配。
🛠 上手难度 · 中偏高
有 CUDA 显卡就能跑,但高质量重建得会调参。建议先跑通 COLMAP 把相机位姿搞准,否则白忙活。
!配图( 配图_04:花园场景由无数彩色微小椭球体构成,视角微旋转,科技感与自然场景融合的视觉效果 )
④ LeRobot
机器人 AI,像 NLP 一样简单
⭐ 24,628 | 🔗 huggingface/lerobot
HuggingFace 的野心:把机器人 AI 做成下一个 transformers。
给你预训练模型、共享数据集、几行代码就能让机械臂动起来。支持 ALOHA、Koch 等主流低成本硬件,模仿学习和强化学习都有现成 pipeline。
🎯 什么时候用
手里有机器人硬件或仿真环境、不想从零写控制代码。也适合复现论文不想造轮子的同学。
🛠 上手难度 · 低
用过 HuggingFace 生态的话 API 几乎零学习成本。数据集 Hub 直接拉,模型 load 就能跑。

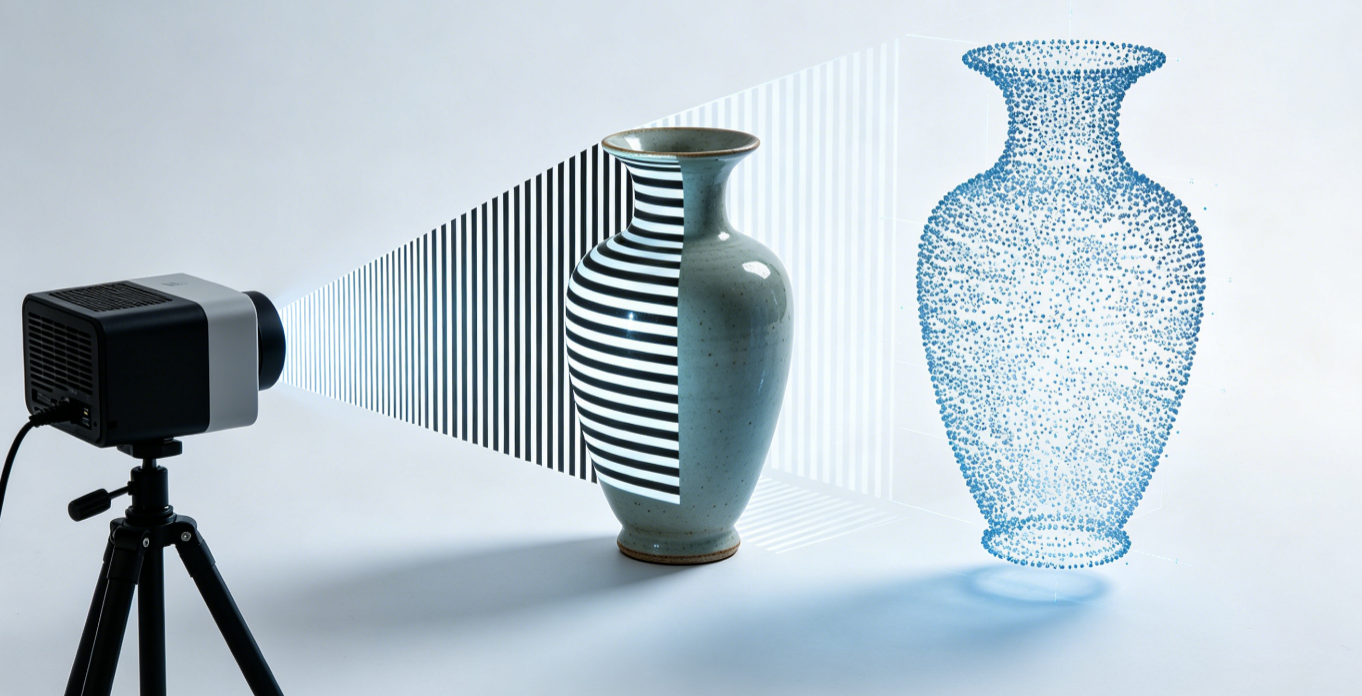
⑤ SLMaster
开源结构光 3D 扫描,一站配齐
⭐ 391 | 🔗 Practice3DVision/SLMaster
星不多,但结构光这个领域,它是目前最完整且还在更新的开源方案。
相机标定 → 条纹编码 → 三维重建 → 点云处理,一条龙全包。结构光开源一直稀少,要么太老没人管,要么缺胳膊少腿。SLMaster 是难得的全活选手。
🎯 什么时候用
做 3D 扫描的工程师、研究生。有台相机和投影仪就能搭一套简易扫描系统。
🛠 上手难度 · 偏高
得先懂结构光原理------格雷码、相移法这些基础绕不过去,还要自己搞定硬件搭建和标定。但一旦跑通,能做的方向很多。
📌 数据来自 GitHub API,2026 年 6 月 3 日实时查询
觉得有用? 记得点赞、收藏、关注。下期见 👋