一、方案背景
随着无人车、特种车辆、工程机械、移动巡检车、机器人底盘、无人配送车以及远程作业平台的发展,传统"人在现场"的操作模式正在逐步向"人在远端、设备在现场"的远程遥控模式演进。
在这类系统中,远程操作员需要像坐在真实驾驶舱或操作舱中一样,实时看到设备前方、后方、左右两侧、舱内、云台、机械臂或作业区域的多路视频画面,并通过方向盘、手柄、踏板、操纵杆、触控面板或业务控制台完成远程控制。
座舱远程遥控系统的核心并不是单纯的视频直播,而是一个"视频感知 + 低延迟传输 + 控制闭环 + 状态回传 + 安全保护"的完整系统。视频必须足够低延迟,控制必须足够可靠,网络必须能够同时适配内网专线和5G广域网,系统还需要具备录像、追溯、告警、平台接入和多端显示能力。
大牛直播SDK可以在该方案中承担实时音视频采集、编码、推流、拉流、播放、录像、转发、轻量级RTSP服务、RTSP/RTMP/HTTP-FLV播放、GB28181平台对接等核心媒体能力,为座舱远程遥控系统提供稳定、低延迟、可扩展的音视频基础底座。
二、系统建设目标
本方案面向座舱远程遥控场景,重点解决以下问题:
第一,实现多摄像头、多角度实时视频接入。系统可接入前视、后视、左视、右视、舱内、云台、作业臂、盲区补偿等多路摄像头,为远程操作员提供接近现场驾驶舱的全方位视觉感知。
第二,实现低延迟音视频传输。针对远程遥控对实时性的要求,视频链路应尽量减少采集、编码、传输、解码和渲染环节的累计延迟,优先满足远程观察、远程辅助、低速遥控、巡检作业等场景。
第三,支持内网和5G广域网两种部署方式。在园区、矿区、港口、工厂、仓储等场景,可采用内网、专线或局域网部署;在移动巡检、户外作业、车辆远程控制等场景,可通过5G网络接入云端或中心侧平台。
第四,实现视频链路和控制链路解耦。视频采用大牛直播SDK完成低延迟传输,控制指令采用独立的可靠控制通道完成下发,避免视频链路抖动直接影响控制指令,并便于做权限、安全和应急保护。
第五,支持录像、回溯和监管接入。系统可对远程遥控过程进行全程录像,也可按事件触发录像,并可根据需要对接GB28181平台或业务监管平台,满足事后追溯、责任认定和平台融合需求。
三、总体架构设计
座舱远程遥控系统整体可分为四层:
- 车端/设备端感知层
- 边缘媒体接入与编码层
- 网络传输与转发层
- 远程座舱操作与平台层

在这个架构中,大牛直播SDK主要承担车端媒体采集编码、实时推流、中心侧转发、远程座舱播放、录像和平台对接等能力。控制通道可以由业务系统独立实现,例如基于TCP、WebSocket、MQTT、私有协议或工业控制协议完成指令交互。
四、车端多摄像头接入方案
车端或设备端通常需要接入多路摄像头,以满足不同视角的观察需求。典型配置如下:
| 摄像头类型 | 作用 |
|---|---|
| 前视主摄像头 | 远程驾驶或前向行驶主视角 |
| 后视摄像头 | 倒车、后方避障、远程泊车 |
| 左右侧摄像头 | 盲区观察、转向辅助、狭窄空间操作 |
| 舱内摄像头 | 人员状态、设备状态、座舱环境观察 |
| 云台摄像头 | 远距离观察、目标跟踪、巡检取证 |
| 作业臂/机械臂摄像头 | 工程作业、抓取、装卸、检测 |

车端可以根据硬件平台选择不同接入方式:
如果摄像头已经输出RTSP流,可直接通过大牛直播SDK的RTSP播放器或拉流模块接入,完成预览、转发或二次处理。
如果摄像头为本地USB、MIPI、Camera2或系统摄像头,可通过推流端模块完成采集、编码和RTMP推送。
如果设备端本身需要提供局域网访问能力,可以集成大牛直播SDK轻量级RTSP服务模块,将本地摄像头或编码后数据发布为RTSP流,供车内网关、调试工具或边缘节点拉取。
如果需要将多路摄像头同时送到中心平台,可在车端启动多个推流实例,每一路摄像头对应一个推流通道;也可以在边缘网关侧做多路汇聚、编码参数调整和统一转发。
安卓采集摄像头和麦克风实现低延迟RTMP推流
五、低延迟视频传输设计
远程遥控场景对时延非常敏感。视频链路的延迟主要来自采集、编码、网络传输、接收缓冲、解码和渲染几个环节。

基于大牛直播SDK,可以从以下几个方面优化低延迟效果:
第一,车端编码尽量采用低延迟参数。建议缩短GOP,控制B帧使用,降低编码缓冲,结合实际场景设置合理分辨率、帧率和码率。主视角可以优先保证帧率和清晰度,辅助视角可以适当降低分辨率或帧率,节省总带宽。
第二,播放器端开启低延迟播放策略。远程座舱侧的大牛直播SDK播放器可采用低延迟播放模式,减少播放缓冲,支持快速首屏显示,降低视频链路端到端延迟。
第三,多视角区分主辅优先级。前视主摄像头作为主驾驶视角,应优先保障最低延迟;左右侧、后视、舱内和云台画面可以作为辅助视角,允许略高缓冲,以提高整体稳定性。
第四,弱网场景下动态调整码率和分辨率。在5G广域网下,网络带宽和抖动可能随车辆位置变化而变化。系统可根据丢包、下载速度、码率、帧率和播放状态动态调整编码参数,必要时降低辅路码率,保障主视角持续可用。
第五,控制视频路数和画面布局。在远程座舱中,通常不建议所有画面都以最高码率、最高帧率同时传输。更合理的方式是"1路主视角高清低延迟 + 多路辅助视角中低码率 + 关键视角按需放大"。
Windows平台 RTSP vs RTMP播放器延迟大比拼
六、内网部署方案
在园区、矿区、港口、工厂、仓储、校园、封闭道路等场景,车辆或设备通常运行在相对固定区域内,可以采用内网或专线方式部署。
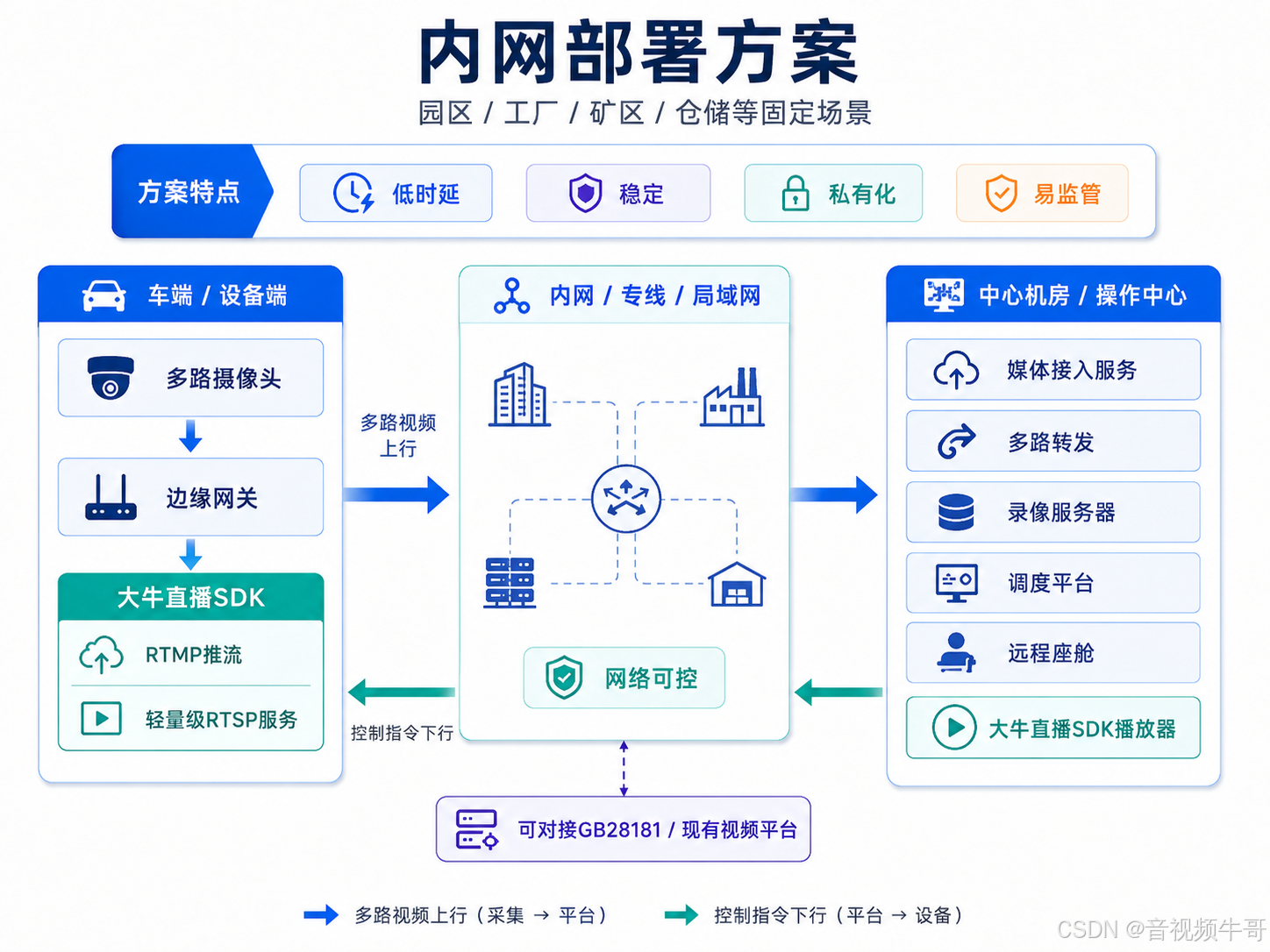
内网部署有以下特点:
网络可控,带宽相对稳定;
中心平台可私有化部署;
不依赖公网云;
安全边界清晰;
适合固定场景下的远程巡检、远程作业和集中调度。
推荐部署方式如下:
车端多路摄像头通过大牛直播SDK推流模块推送到内网媒体服务器,远程座舱通过大牛直播SDK播放器低延迟拉流播放。中心侧可部署转发服务,实现多座舱、多监管端、多录像端同时观看。
如果现场摄像头较多,也可以在车端或边缘网关侧集成轻量级RTSP服务,将各路摄像头以RTSP形式发布,中心侧按需拉取。对于已有RTSP摄像头的场景,可以直接接入原始RTSP流,再通过大牛直播SDK完成低延迟播放、录像或二次转发。
内网部署下,建议将控制服务器、媒体服务器和录像服务器部署在同一局域网或同一边缘机房中,减少跨网跳转,提高遥控闭环的稳定性。
七、5G广域网部署方案
在移动巡检车、无人配送车、户外机器人、特种车辆、应急通信车、远程工程机械等场景,设备端通常需要通过5G网络接入中心平台。
5G广域网部署的核心挑战是网络波动。车辆移动过程中可能出现带宽变化、基站切换、局部弱覆盖、上行抖动和短时丢包。因此,系统设计不能只追求理论低延迟,而要重点考虑可用性、稳定性和安全兜底。

推荐5G部署方式如下:
车端设备通过5G CPE、5G模组或工业路由器接入公网或专网;
多路摄像头由车端网关统一采集、编码和推流;
中心侧部署公网可访问的媒体接入服务;
远程座舱通过播放器低延迟播放多路视频;
控制指令通过独立安全通道下发到车端控制网关;
车端控制网关负责指令校验、限幅、状态反馈和应急处理。
对于公网环境,建议车端主动向中心侧发起连接,减少NAT穿透复杂度。视频可以采用RTMP推送、RTSP拉取转发或HTTP-FLV播放等方式组合。对于浏览器端轻量监看,可结合HTTP/HTTPS-FLV服务和客户端能力,用于监管端、调度端或非强交互观察端。
在5G网络下,建议设置多级降级策略:
当网络良好时,开启多路高清低延迟画面;
当网络轻微波动时,降低辅路码率,保留主视角清晰度;
当网络明显抖动时,主视角降分辨率保帧率,辅路切为低帧率;
当网络不可用或控制链路异常时,车端进入安全状态,例如减速、停车、悬停或切换本地自治策略。
八、远程座舱端设计
远程座舱端是操作员直接使用的界面,应重点关注"低延迟、低误判、低疲劳、易操作"。

典型界面布局包括:
主视角大窗口:显示前视或当前操作关键画面;
辅助视角小窗口:显示后视、左右侧、舱内、云台、作业臂等画面;
地图/定位区域:显示设备位置、路线、速度和方向;
状态区域:显示网络质量、电量、速度、档位、转向角、设备状态、告警信息;
控制区域:对接方向盘、手柄、踏板、摇杆或业务控制面板;
录像与抓拍区域:支持远程抓拍、事件录像、录像检索和回放。
大牛直播SDK播放器可在座舱端实现多实例低延迟播放,每一路视频对应一个播放器实例。主画面可以支持放大、切换、旋转、镜像、截图、录像和音量控制。对于多路画面场景,可以采用"主画面 + 辅助画面矩阵"的方式,既保证主视角低延迟,又保留多角度环境感知能力。
在Windows座舱端,可结合大牛直播SDK的Windows播放器能力实现多路RTSP/RTMP低延迟播放;在Android平板、车载屏或移动控制终端上,可使用Android播放器模块;在iOS或Unity3D场景下,也可以结合对应平台SDK实现更强的交互式座舱界面。
Android平台RTMP直播播放器功能与时延测试
九、控制链路设计
座舱远程遥控系统必须将视频链路和控制链路解耦。视频链路负责"看得见",控制链路负责"控得住"。两者可以协同,但不应互相阻塞。

控制链路建议采用独立通道,包括:
方向控制;
速度控制;
刹车控制;
档位控制;
云台控制;
机械臂控制;
灯光、喇叭、警示设备控制;
模式切换;
紧急停止;
本地/远程控制权切换。
控制指令下发后,车端应立即返回执行状态,包括指令接收时间、执行结果、当前速度、方向角、设备状态和异常信息。远程座舱端不应只依赖视频判断控制是否生效,而应通过状态回传形成明确的闭环。
建议控制链路具备以下机制:
指令序号和时间戳;
心跳检测;
超时重发或丢弃策略;
权限校验;
指令限幅;
互斥控制;
急停优先级最高;
网络异常自动降级;
本地安全策略兜底。
例如,当远程座舱连续若干个心跳周期未收到车端响应时,车端应自动进入安全状态;当控制指令延迟超过阈值时,车端可拒绝执行过期指令,避免"迟到指令"导致误动作。
Windows平台毫秒级延迟RTSP播放器延迟测试
十、录像、取证与回放设计
座舱远程遥控系统通常需要完整记录操作过程,便于事后回溯、事故分析、作业质检和责任认定。

大牛直播SDK可结合录像模块实现多路视频录像。录像策略可以分为三类:
第一,全程录像。远程遥控开始后,主视角和关键辅助视角自动录像,适合安全要求较高的场景。
第二,事件录像。当出现告警、急停、碰撞、越界、人工接管、网络异常等事件时,系统自动触发录像,保存事件前后的视频片段。
第三,按需录像。操作员或平台管理员手动触发录像,用于巡检取证、作业留档或问题反馈。
录像文件可保存在车端、边缘节点或中心服务器。对于关键业务,建议采用中心侧统一存储,便于后续检索和权限管理。对于5G网络不稳定的场景,也可以在车端保留本地录像,网络恢复后再上传关键片段。
如果需要更强的事件追溯能力,可以结合预录机制,在事件发生时保存事件前几秒的视频数据,从而避免只录到事件发生后的画面。
RTSP/RTMP直播播放器预录回放:事件前后片段完整保存
十一、平台接入与监管扩展
在安防、应急、园区、交通、执法、能源、矿山等场景中,远程遥控系统往往不只是给一个操作员使用,还需要接入上级平台、调度平台或监管平台。
大牛直播SDK的GB28181设备接入能力可用于和国标平台对接,将车端或设备端的视频能力纳入统一视频监管体系。对于已有视频平台的客户,可以将多路摄像头通过GB28181、RTSP、RTMP等方式接入现有平台,降低系统集成难度。
同时,轻量级RTSP服务可以用于现场调试、本地监看和边缘节点分发;RTSP/RTMP转发模块可以用于将车端视频转推到中心平台或第三方系统;HTTP/HTTPS-FLV能力可以用于浏览器端轻量级监看,适合调度大屏、网页端监管和临时查看。
十二、网络与安全设计
远程遥控系统涉及实际设备控制,必须重视安全设计。
网络层面,内网场景建议采用专用VLAN、VPN、专线或边缘私有化部署;5G广域网场景建议采用专网APN、VPN隧道、TLS加密、访问白名单和中心侧鉴权。
业务层面,需要对操作员、设备、会话和控制权限进行统一管理。一个设备同一时刻通常只允许一个主控座舱具备控制权,其他用户只能观看或申请接管。控制权切换需要有明确的确认机制和日志记录。
控制安全方面,建议所有控制指令都进行鉴权、签名、序号校验和超时判断。急停指令应具备最高优先级,并可由车端本地安全模块直接执行。
视频安全方面,建议对推流地址、播放地址、访问Token、有效期、IP白名单和用户权限进行统一管理,避免视频流被非法拉取。
十三、典型模块组合
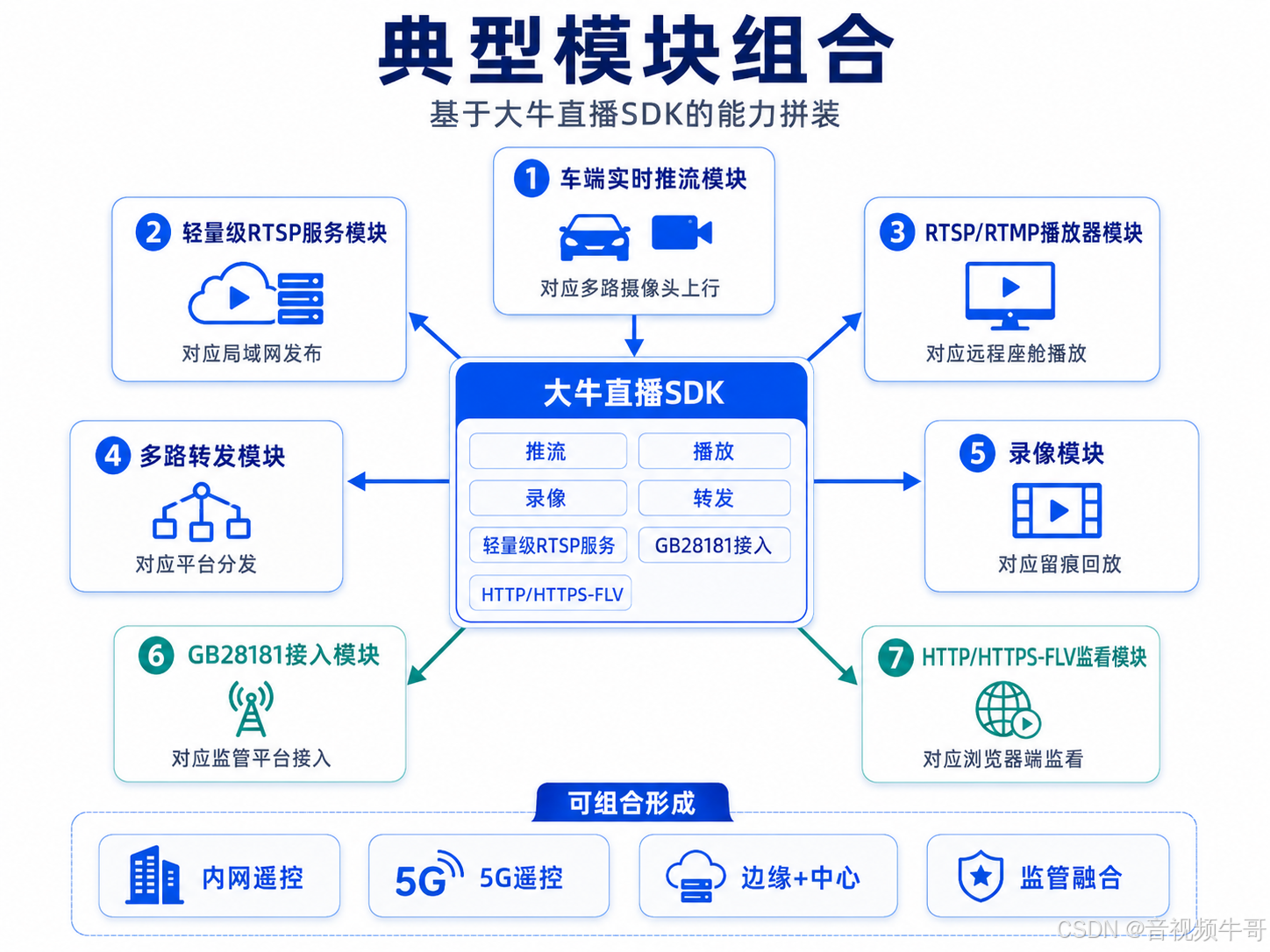
基于大牛直播SDK,可以形成如下模块组合:
1. 车端实时推流模块
用于多路摄像头采集、编码和RTMP推送。适合车端主动推送到中心平台,尤其适合5G公网或NAT环境。
2. 轻量级RTSP服务模块
用于车端或边缘网关将本地摄像头、编码数据或处理后画面发布为RTSP流,适合内网访问、现场调试和局域网分发。
3. RTSP/RTMP播放器模块
用于远程座舱端低延迟播放多路视频。支持多实例播放、低延迟模式、截图、录像、音量控制、画面旋转、镜像等能力。
4. 多路转发模块
用于中心侧或边缘侧将多路RTSP/RTMP流统一转发、分发或转推,解决多端观看、多平台接入和跨网络转发问题。
5. 录像模块
用于主视角和关键辅助视角录像,支持全程录像、事件录像和按需录像。
6. GB28181接入模块
用于对接国标视频平台,实现监管、调度和上级平台接入。
7. HTTP/HTTPS-FLV服务与客户端模块
用于浏览器端或轻量级监管端播放,适合非强控制类监看场景,例如调度大屏、网页预览、临时查看。
十四、推荐部署形态
形态一:内网低延迟遥控
适合园区、工厂、矿区、港口、仓储和封闭道路。
车端摄像头通过RTSP或RTMP进入内网媒体节点;
远程座舱在同一内网中低延迟拉流播放;
控制通道走内网TCP或私有协议;
录像服务器部署在本地机房;
可对接本地调度平台或GB28181平台。
该模式的优势是网络可控、延迟稳定、安全边界清晰,适合高频使用和私有化部署。
形态二:5G广域网远程遥控
适合移动巡检车、无人配送车、户外机器人和特种车辆。
车端通过5G主动推流到中心平台;
中心侧媒体服务器负责接入、转发和录像;
远程座舱通过公网或专网访问中心平台;
控制通道独立加密传输;
弱网时自动降码率、保主视角、降辅视角;
网络异常时车端自动进入安全策略。
该模式的优势是覆盖范围广,适合跨区域远程调度,但需要重点处理网络抖动、丢包、基站切换和安全兜底。
形态三:边缘节点 + 中心平台混合部署
适合多个作业区域、多个车辆集群和跨区域调度。
每个区域部署边缘媒体节点;
车端优先接入就近边缘节点;
边缘节点负责本地转发、录像和协议适配;
中心平台负责统一调度、权限、回放和跨区域监看;
远程座舱可按任务连接到对应边缘节点。
该模式兼顾低延迟和平台化管理,适合规模化部署。
十五、方案优势
基于大牛直播SDK建设座舱远程遥控系统,主要优势体现在以下几个方面:
第一,模块完整。SDK覆盖推流、播放、录像、转发、轻量级RTSP服务、GB28181接入、HTTP/HTTPS-FLV播放等能力,可以支撑从车端采集到中心调度再到远程座舱播放的完整链路。
第二,低延迟能力强。播放器和推流模块可面向实时音视频场景进行低延迟优化,适合远程观察、远程巡检、远程辅助和低速遥控等业务。
第三,多平台适配。Windows、Android、iOS、Linux、Unity3D等平台能力,可满足车端网关、远程座舱、调度大屏、移动终端和三维可视化界面的不同集成需求。
第四,多路能力灵活。系统可根据业务需要灵活接入多路摄像头,支持主辅视角组合、多实例播放、多路录像和多路转发。
第五,部署方式灵活。既支持内网私有化部署,也支持5G广域网接入,还可以采用边缘节点和中心平台混合架构。
第六,便于平台融合。通过RTSP、RTMP、HTTP-FLV、GB28181等能力,可以与客户已有视频平台、调度平台、监管平台和业务系统融合。
十六、适用场景
该方案适用于以下典型场景:
无人车远程接管;
园区巡逻车远程驾驶;
矿山车辆远程作业;
港口无人集卡远程辅助;
工程机械远程操控;
消防、应急、安防特种车辆远程指挥;
机器人底盘远程遥控;
移动巡检车远程调度;
仓储物流车远程操作;
低速无人配送车远程监管。
对于高速自动驾驶等高风险场景,系统应结合本地自动驾驶能力、冗余通信、功能安全机制和严格的安全认证流程。大牛直播SDK主要提供实时音视频能力,实际车辆控制安全还需要由整车控制系统、控制网关和业务安全系统共同保障。
十七、结语
座舱远程遥控系统的本质,是把现场设备的"视觉感知、状态感知和控制能力"安全、稳定、低延迟地延伸到远端操作中心。
在这个过程中,音视频链路是远程操作员的"眼睛",控制链路是远程操作员的"手",网络链路是系统的"神经",安全策略则是整个系统的底线。
大牛直播SDK可以围绕多摄像头采集、低延迟推流、远程播放、多路转发、录像回溯、轻量级RTSP服务、GB28181接入和HTTP/HTTPS-FLV监看等模块,为座舱远程遥控系统提供稳定可靠的实时音视频基础能力。
通过"车端多路感知 + 低延迟媒体传输 + 独立控制通道 + 内网/5G双模式部署 + 事件录像与监管接入"的整体设计,可以构建一套适用于无人车、机器人、工程机械、巡检车和特种车辆的远程座舱遥控解决方案。
📎 CSDN官方博客:音视频牛哥-CSDN博客