更多 C++ 文章见《修远之路(C++集萃)》专栏
yaml-cpp 是基于 SAX 事件驱动模型的 C++ YAML 解析库,通过多层间接引用(Node → node_ref → node_data)实现零拷贝语义的树形数据结构操作。
核心能力:
| 能力 | 适用场景 | 不适用场景 |
|---|---|---|
| 事件驱动解析 | 流式处理大 YAML 文档 | 随机访问特定节点(需先完整构建 Node 树) |
| Node 树随机访问 | 配置文件读取、结构化数据查询 | 超大 YAML(>100MB),内存占用敏感 |
convert<T> 类型转换 |
C++ 强类型配置映射 | 动态 schema(运行时才知道字段类型) |
| Emitter 流式输出 | 程序化生成 YAML 文档 | 需要精确控制输出格式(如保留注释) |
| GraphBuilder 扩展 | 自定义图结构构建 | 简单配置读取(过度设计) |
整体介绍
核心模块
| 模块 | 职责 | 输入输出 |
|---|---|---|
| Scanner | 将字节流词法分析为 Token 流 | istream → vector<Token> |
| Parser | 驱动 Scanner 并将 Token 流调度为 SAX 事件 | Token 流 → EventHandler 回调 |
| EventHandler | 定义 SAX 事件接口(OnScalar/OnMapStart 等) | 虚函数回调 |
| NodeBuilder | 将 SAX 事件构建为 Node 树 | EventHandler 回调 → Node 树 |
| Node | 值语义的公开句柄,持有 shared_memory_holder + shared_node_ref |
用户操作入口 |
| detail::node_ref | 间接层,管理节点身份、共享状态及数据委托 | 代理至 node_data |
| detail::node_data | 纯数据载荷,存储 scalar/sequence/map | 类型标记 + 节点拓扑容器 |
| detail::memory_holder | Arena 式节点分配器,管理所有隐藏节点的生命周期 | set<shared_node> |
| convert | 双向类型转换 trait | Node ↔ T |
| Emitter | 流式 YAML 生成器,维护格式状态机 | operator<< 调用 → ostream_wrapper |
| DepthGuard | 递归深度守卫,模板参数控制最大深度 | 构造时 +1,析构时 -1 |
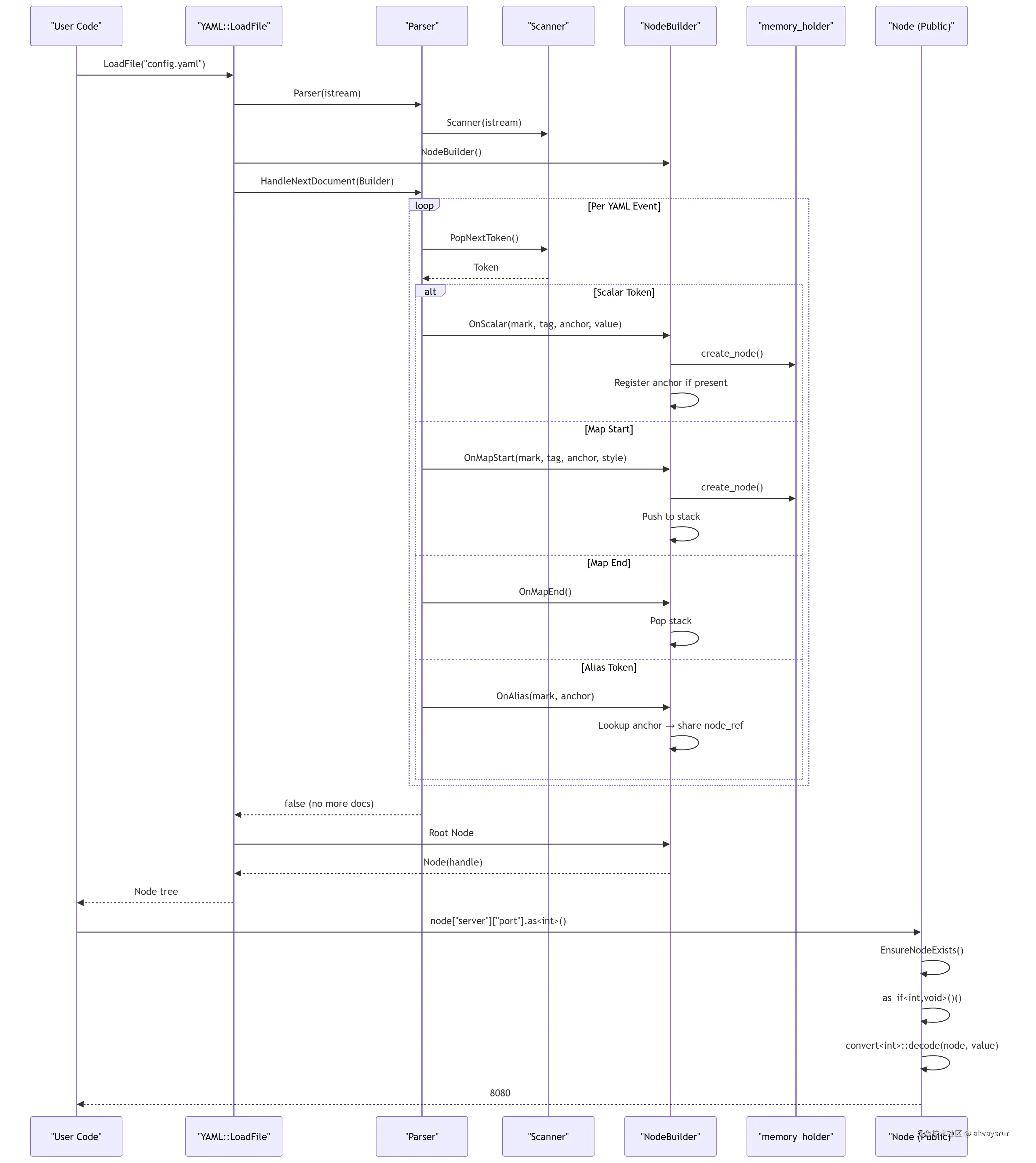
核心执行时序
yaml-cpp 的解析核心是一个经典的两阶段状态机。当调用 Parser::HandleNextDocument(EventHandler& handler) 时,内部执行流如下:
rust
Parser::HandleNextDocument
└── Parser::ParseDocument
└── Parser::ParseNode
├── Scanner::peek() -> 探测当前 Token 类型
├── Parser::ParseImplicitMap / ParseBlockSequence -> 根据语法匹配
└── handler.OnScalar() / handler.OnMapStart() -> 触发 SAX 事件回调完整数据流与生命周期绑定时序如下图所示:
底层原理与设计
关键抽象与机制
三层间接引用模型
yaml-cpp 真正的对象拓扑由公开的句柄和内部细节空间分离而成。其真实数据引用链为 YAML::Node → detail::node_ref → detail::node_data:
c
YAML::Node (Public API Handle)
├── m_isValid: bool <- 标识当前节点是否有效
├── m_pMemory: detail::shared_memory_holder <- 内部 Arena 生命周期控制锚点
└── m_pRef: detail::shared_node_ref <- 关键间接层:指向真实引用
detail::node_ref (Indirection & Identity Layer)
├── m_pData: detail::shared_node_data <- 共享的数据载荷
├── m_dependencies: std::vector<node_idx> <- 延迟图依赖关系
└── m_anchor: anchor_t <- YAML Anchor 标记标识
detail::node_data (Payload Storage)
├── m_type: NodeType::value (Null, Scalar, Sequence, Map)
├── m_scalar: std::string
├── m_sequence: std::vector<Node> <- 组合嵌套
└── m_map: std::vector<std::pair<Node, Node>> <- 线性键值对容器node_ref 层存在的唯一理由是支持 YAML 的 Anchor/Alias 语义。当解析器遇到 &anchor 时,NodeBuilder 注册 anchor 到当前 node_ref 的映射;遇到 *alias 时,新构建的 Node 的 m_pRef 直接指向已有节点的 m_pRef。这样便实现了 O(1) 的引用共享,避免了深度拷贝带来的内存开销与图拓扑断裂。
依赖传播机制
由于 YAML 规范允许在某些复杂流中出现"先引用、后定义"的图拓扑(Forward Reference),内部通过 m_dependencies 记录尚未完全确立定义的节点索引。一旦目标节点通过赋值或解析被调用 mark_defined(),它会沿着依赖链路递归地将所有依赖当前节点的父代或者关联节点同步标记为已定义,从而完美解决了图解析过程中的不确定性。
Arena 内存模型
memory_holder 是整个 yaml-cpp 堆内存的基础设施。所有通过解析或动态创建的内部节点,其底层的生命周期都并不由单个 Node 独占。YAML::Node 内部持有 detail::shared_memory_holder(本质上是包装了的 std::shared_ptr 节点池)。
当通过 operator[] 提取子节点或进行节点赋值时,子节点会自动共享父节点的 memory_holder。这意味着,只要整棵树的任意一个 Node 实例仍然存活,整个 Arena 内存池就不会被销毁。在两棵独立的 Node 树发生合并或互相赋值时,系统内部会调用 memory_holder::merge(),将源树的节点池生命周期强行并入目标树,以杜绝悬垂指针(Dangling Pointer)问题。
SAX 事件驱动架构
Parser 严格遵循单一职责原则,其不感知 DOM 树的存在。它只负责消费 Scanner 出来的 Token 并向 EventHandler 接口投递标准的 SAX 事件。NodeBuilder 和 EmitFromEvents 是两个独立的策略实现:
NodeBuilder:将事件构建为内存中的 Node 树。EmitFromEvents:将事件直接转发给Emitter,实现无需经过 DOM 树落地的高性能流式重写(Round-trip)。
DepthGuard 递归防护
为了防御恶意的非信任 YAML 输入(如具有数万层嵌套的恶意溢出攻击畸形文件),系统引入了 RAII 机制的 DepthGuard。它在进入 ParseNode 深度递归时通过模板参数约束最大压栈深度(默认 2000 ),超出阈值即刻抛出 DeepRecursion 异常,强行中断,保护宿主进程免于栈溢出(Stack Overflow)崩溃。
源码地图
ini
yaml-cpp/include/yaml-cpp/
├── yaml.h # Umbrella header, re-exports all
├── parser.h # Parser: Scanner driver + directive handler
├── emitter.h # Emitter: streaming YAML generator
├── exceptions.h # Exception hierarchy (Parser/Representation/Emitter)
├── node/
│ ├── node.h # Node: public value-semantic handle
│ ├── impl.h # Node inline impl: as_if, operator[], assignment
│ ├── convert.h # convert<T>: bidirectional type conversion traits
│ ├── parse.h # Load/LoadFile: convenience API
│ ├── emit.h # Dump: Node → string
│ └── detail/
│ ├── node_ref.h # detail::node_ref: indirection for alias sharing
│ ├── node_data.h # detail::node_data: payload (scalar/seq/map)
│ ├── memory.h # memory_holder: arena allocator
│ └── iterator.h # iterator_base: forward iterator over node tree
├── eventhandler.h # EventHandler: SAX interface (core abstraction)
├── emitfromevents.h # EmitFromEvents: EventHandler → Emitter bridge
├── depthguard.h # DepthGuard: RAII recursion protection
├── ostream_wrapper.h # ostream_wrapper: position-tracking output adapter
├── emittermanip.h # EMITTER_MANIP: format control manipulators
└── contrib/
└── graphbuilder.h # GraphBuilderInterface: custom graph builder核心源文件:
node.h--- 公开 API 的核心,定义 Node 的全部操作接口。detail/node_ref.h--- 身份间接层对象,负责 alias 共享与底层的真实指针流转。detail/node_data.h--- 数据载荷存储,理解 map/sequence 的内部底层表示。convert.h--- 类型转换体系,宏生成策略与 STL 容器特化。eventhandler.h--- SAX 接口定义,Parser 与 Builder 的解耦契约。
API 讲解
常用 API
| API | 参数 | 说明 |
|---|---|---|
LoadFile(filename) |
文件路径 | 加载 YAML 文件为 Node 树,失败抛 BadFile 或 ParserException |
Load(input) |
string/istream |
从字符串或流加载单个文档 |
LoadAll(input) |
string/istream |
加载多文档 YAML(--- 分隔) |
node[key] |
Key(string/int/Node) |
查找子节点;const 版本键不存在返回 Zombie Node;非 const 版本自动创建。 |
node.as<T>() |
无 | 类型转换,失败抛 TypedBadConversion<T> |
node.as<T>(fallback) |
默认值 | 类型转换,失败返回 fallback 而非抛异常 |
node.IsDefined/IsNull/IsScalar/IsSequence/IsMap() |
无 | 类型谓词,不抛异常 |
node.push_back(value) |
T 或 Node |
追加到 Sequence,非 Sequence 抛 BadPushback |
node.force_insert(k, v) |
Key, Value | 强制插入 Map(允许重复键)。 |
Dump(node) |
Node |
将 Node 序列化为 YAML 字符串。 |
Emitter |
可选 ostream& |
流式 YAML 生成器,支持 operator<< 链式调用 |
DepthGuard<max_depth> |
深度引用 + Mark + msg | RAII 递归深度守卫,超限抛 DeepRecursion |
样例
配套的输入文件 config.yaml
yaml
server:
host: "127.0.0.1"
port: 9000
logLevel: 1
database:
host: "localhost"
port: 5432
user: "postgres"
password: "secure_password"
database: "prod_db"
endpoints:
- "/api/v1/user"
- "/api/v1/metrics"
metadata:
cluster: "asia-east"
version: "2026.1"完整的源码 main.cpp:
c
#include <iostream>
#include <fstream>
#include <string>
#include <vector>
#include <unordered_map>
#include "yaml-cpp/yaml.h"
#include "spdlog/spdlog.h"
struct ServerConfig {
int port{8080};
std::string host{"0.0.0.0"};
int logLevel{2};
};
struct DbConfig {
std::string host;
uint16_t port{5432};
std::string user;
std::string password;
std::string database;
};
struct AppConfig {
ServerConfig server;
DbConfig database;
std::vector<std::string> endpoints;
std::unordered_map<std::string, std::string> metadata;
};
namespace YAML {
template <>
struct convert<ServerConfig> {
static Node encode(const ServerConfig& rhs) {
Node node;
node["port"] = rhs.port;
node["host"] = rhs.host;
node["logLevel"] = rhs.logLevel;
return node;
}
static bool decode(const Node& node, ServerConfig& rhs) {
if (!node.IsMap()) {
return false;
}
rhs.port = node["port"].as<int>(8080);
rhs.host = node["host"].as<std::string>("0.0.0.0");
rhs.logLevel = node["logLevel"].as<int>(2);
return true;
}
};
template <>
struct convert<DbConfig> {
static Node encode(const DbConfig& rhs) {
Node node;
node["host"] = rhs.host;
node["port"] = rhs.port;
node["user"] = rhs.user;
node["password"] = rhs.password;
node["database"] = rhs.database;
return node;
}
static bool decode(const Node& node, DbConfig& rhs) {
if (!node.IsMap()) {
return false;
}
if (!node["host"]) {
spdlog::error("database.host is required");
return false;
}
rhs.host = node["host"].as<std::string>();
rhs.port = node["port"].as<uint16_t>(5432);
rhs.user = node["user"].as<std::string>("");
rhs.password = node["password"].as<std::string>("");
rhs.database = node["database"].as<std::string>("");
return true;
}
};
} // namespace YAML
AppConfig load_config(const std::string& filepath) {
AppConfig cfg;
try {
YAML::Node root = YAML::LoadFile(filepath);
if (auto serverNode = root["server"]) {
cfg.server = serverNode.as<ServerConfig>();
} else {
spdlog::warn("missing 'server' section, using defaults");
}
if (auto dbNode = root["database"]) {
cfg.database = dbNode.as<DbConfig>();
} else {
spdlog::error("missing 'database' section, cannot continue");
throw std::runtime_error("required config section 'database' not found");
}
if (auto epNode = root["endpoints"]) {
if (!epNode.IsSequence()) {
spdlog::error("'endpoints' must be a sequence");
throw std::runtime_error("config validation failed: endpoints");
}
cfg.endpoints = epNode.as<std::vector<std::string>>();
}
if (auto metaNode = root["metadata"]) {
if (!metaNode.IsMap()) {
spdlog::warn("'metadata' must be a map, skipping");
} else {
cfg.metadata = metaNode.as<std::unordered_map<std::string, std::string>>();
}
}
} catch (const YAML::BadFile& e) {
spdlog::critical("config file not found: {} - {}", filepath, e.what());
throw;
} catch (const YAML::ParserException& e) {
// 精确防御性日志处理:提取并格式化物理故障点
spdlog::critical("config parse error at line {}, column {} - {}",
e.mark.line + 1, e.mark.column + 1, e.msg);
throw;
} catch (const YAML::BadConversion& e) {
spdlog::critical("config type conversion error: {}", e.what());
throw;
}
return cfg;
}
void write_config(const AppConfig& cfg) {
YAML::Emitter out;
out << YAML::BeginMap;
out << YAML::Key << "server" << YAML::Value << cfg.server;
out << YAML::Key << "database" << YAML::Value << cfg.database;
out << YAML::Key << "endpoints" << YAML::Value << cfg.endpoints;
out << YAML::Key << "metadata" << YAML::Value;
out << YAML::BeginMap;
for (const auto& [k, v] : cfg.metadata) {
out << YAML::Key << k << YAML::Value << v;
}
out << YAML::EndMap;
out << YAML::EndMap;
if (!out.good()) {
spdlog::error("emitter error: {}", out.GetLastError());
return;
}
std::ofstream fout("output_config.yaml");
if (!fout.is_open()) {
spdlog::error("failed to open output file");
return;
}
fout << out.c_str();
spdlog::info("config written successfully");
}
int main() {
const std::string configPath = "config.yaml";
try {
auto cfg = load_config(configPath);
spdlog::info("server: {}:{}, logLevel={}",
cfg.server.host, cfg.server.port, cfg.server.logLevel);
spdlog::info("database: {}:{}/{}",
cfg.database.host, cfg.database.port, cfg.database.database);
write_config(cfg);
} catch (const std::exception& e) {
spdlog::critical("fatal: {}", e.what());
return 1;
}
return 0;
}总结
yaml-cpp 通过间接层(node_ref)实现引用语义与值语义的统一。在 Node 的公开接口中,用户看到的是值语义的按值传递;而在底层,shared_node_ref 实现了 alias 的引用共享。
日志追踪
YAML::Exception基类携带Mark(物理行号+列号),在catch响应块必输出e.mark.line + 1和e.mark.column + 1;这是定位不规范 YAML 语法报错的高效手段。YAML::BadConversion不显式携带字段名称。建议在convert<T>::decode阶段中对业务强依赖字段进行前置IsDefined()校验,缺失则返回false。
需注意的问题点:
-
Node 拷贝是浅拷贝:
Node的所有拷贝构造与赋值行为都只是浅层的指针、计数传递,它们共享底层的memory_holder。对子节点拷贝的任何写修改(如node_copy["port"] = 80)都会无差别地同步影响并污染原始根节点。若需要脱离关系独立演进,必须显式调用YAML::Clone(node)。 -
operator\[\] 的 const/non-const 语义分裂
const Node::operator[](key) const:若查询的键名不存在,内部将隐式返回一个被标记为无效的 Zombie 节点(即IsDefined() == false),过程不触发任何异常。但此时若调用.as<T>()强转,程序将直接抛出InvalidNode运行时崩溃异常。Node::operator[](key):若当前节点可写且查询键名不存在,系统将触发自动造节点机制(Auto-vivification),强行在底层m_map容器内插入一个空键值对并将其作为新引用返回。
-
Map 查找 O(n):底层
node_data::m_map的实质存储形式是紧凑的vector拓扑通过 Key 去索引节点的操作其底层时间复杂度均为O(n)。 -
Emitter 不保留注释:
Emitter只按当前的格式规则和流拓扑生成纯粹的 YAML 语法树。它在"Load 进 DOM 树再 Dump 回去"的往返流程中,会彻底丢弃原始文件中的所有手工单行/多行注释(#标记)。 -
线程安全:
YAML::Node及其子树没有内嵌任何互斥锁或其他同步机制。虽然其底层的生命周期管理(基于shared_ptr的引用计数)是原子安全的,但是对于节点内部存储容器(m_sequence、m_map)的任何高并发读写、插入行为都是不安全的。
本文使用 markdown.com.cn 排版