某志步进电机驱动器故障排查标准流程
- 某志伺服驱动器故障排查标准流程(CAN报文抓包+解析完整版)
-
- 一、某志驱动器故障排查标准步骤(完整版)
-
- 步骤1:通过CAN分析仪连接驱动器COM1口,获取TPDO/RPDO映射
- 步骤2:记录各TPDO/RPDO映射的寄存器地址
- 步骤3:用CAN分析仪抓取故障过程报文
- [步骤4:将报文复制到 Excel,使用【分列】整理](#步骤4:将报文复制到 Excel,使用【分列】整理)
- 步骤5:对照《某志驱动器手册》逐帧分析
- 二、最常见故障判定(直接对照)
某志伺服驱动器故障排查标准流程(CAN报文抓包+解析完整版)
适用场景 :电机不转、无法回零、撞击后无法使能、报故障、PDO无数据、控制字写不进等疑难问题
工具:CAN分析仪、CAN分析仪上位机、Excel、驱动器数据手册
一、某志驱动器故障排查标准步骤(完整版)
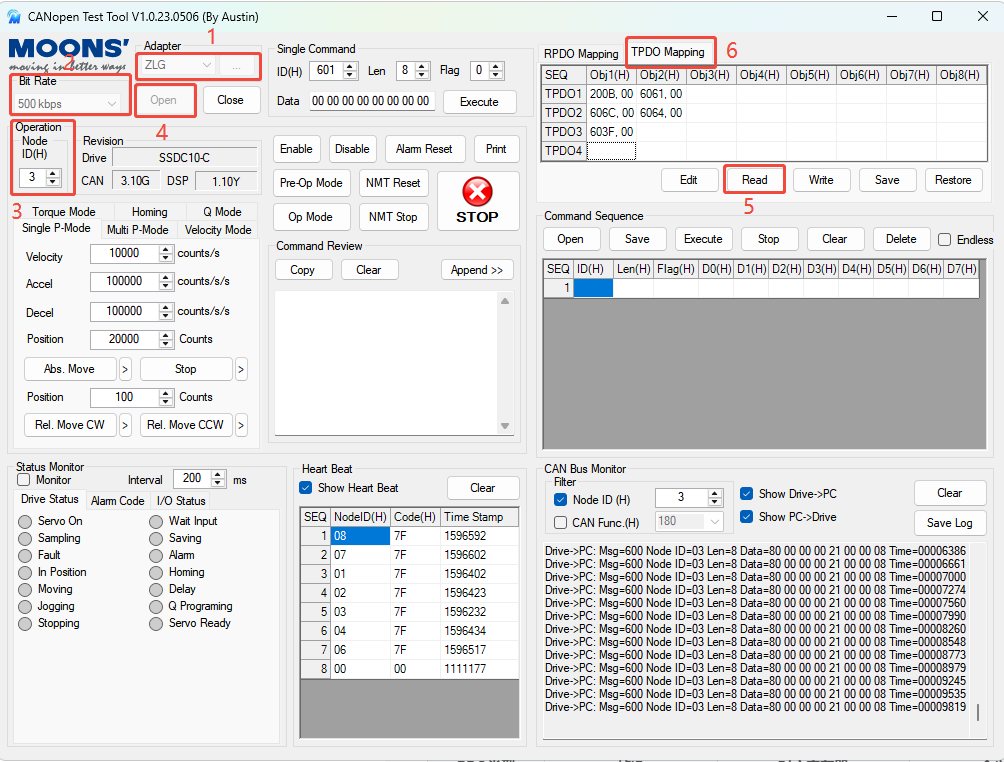
步骤1:通过CAN分析仪连接驱动器COM1口,获取TPDO/RPDO映射
- 连接驱动器 COM1(CAN口) 到CAN分析仪
- 上电,进入某志的专用工具上位机
- 扫描并记录:
- 节点ID(如4、5、6)
- TPDO1/TPDO2 帧ID
- RPDO1/RPDO2 帧ID
- 各PDO对应的寄存器地址
例:
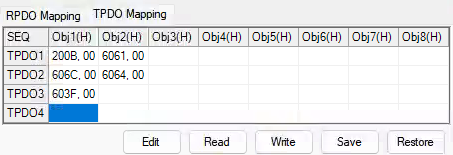
- TPDO1 0x184 → 状态字 + 模式 + 实际位置
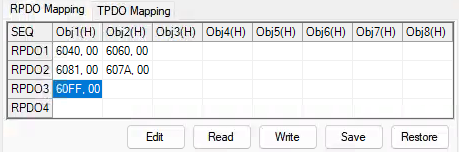
- RPDO1 0x204 → 控制字 + 目标位置
步骤2:记录各TPDO/RPDO映射的寄存器地址
将PDO与寄存器对应关系整理成表,便于后续分析:

步骤3:用CAN分析仪抓取故障过程报文
- 复现故障(如回零、移动、撞击、无法使能)
- 抓包时长:建议 ≥ 1分钟
- 确保抓到:
- 上电
- 使能
- 运行/回零
- 故障发生时刻
- 报错报文
注意:只抓几秒极大概率抓不到故障帧。
步骤4:将报文复制到 Excel,使用【分列】整理
- 复制所有报文
- 粘贴到 Excel A列
- 选中A列 → 数据 → 分列
- 选择 分隔符号 → 空格
- 完成后自动拆分成:
时间、方向、帧ID、数据长度、Data0~Data7
步骤5:对照《某志驱动器手册》逐帧分析
重点查看:
- 状态字 0x6041:是否 Fault(0x0008)、是否禁止、是否使能
- 控制字 0x6040:是否发送 FaultReset(0x80)、使能(0x0F)
- 模式字 0x6060/0x6061:模式是否匹配
- 位置指令/实际位置:是否跳动、异常、被锁定
- SDO异常码:如 0x08000021(写入被拒)
二、最常见故障判定(直接对照)
-
状态字=0x0008 → 驱动器 Fault 故障
→ 必须发 0x80 FaultReset
-
一直回复 0x80 00 00 00 21 00 00 08
→ 0x08000021 写入被拒
→ 未解锁 0x2006 / 仍在故障
-
控制字发 0x0F 但电机不动
→ 模式不对 / 未回零 / 硬件限位
-
撞击后无法使能
→ 跟随错误 → Fault → 未复位 → 永远锁死