引言
上一篇我们学习了图的基本概念、存储方式和两种遍历算法(DFS 与 BFS)。BFS 能解决无权图的最短路径问题------因为每条边权值相等,先搜到的就是最短的。
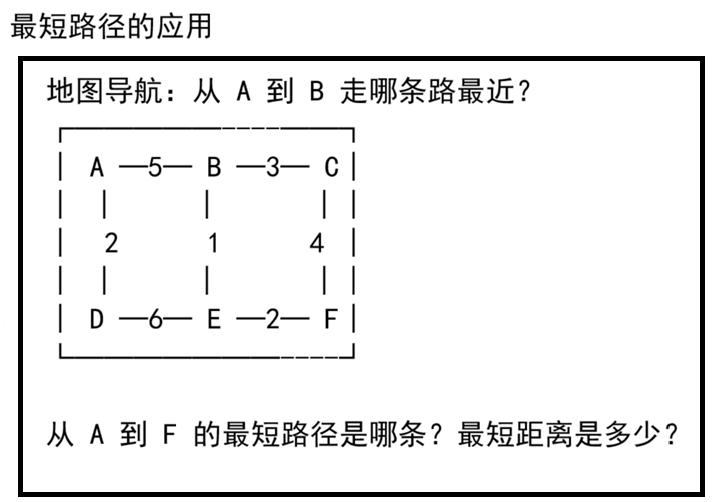
但现实中,路有长短、网有快慢------这就是带权图 。从北京到上海走哪条高速最快?路由器选哪条链路延迟最小?这些都需要最短路径算法。
本文将讲解两种最经典的最短路径算法:Dijkstra(单源最短路径) 和 Floyd(多源最短路径)。
第一部分:Dijkstra 算法(单源最短路径)
一、算法思想
Dijkstra 算法用于求一个源点到其他所有顶点的最短路径 ,要求所有边的权值 ≥ 0(不能处理负权边)。
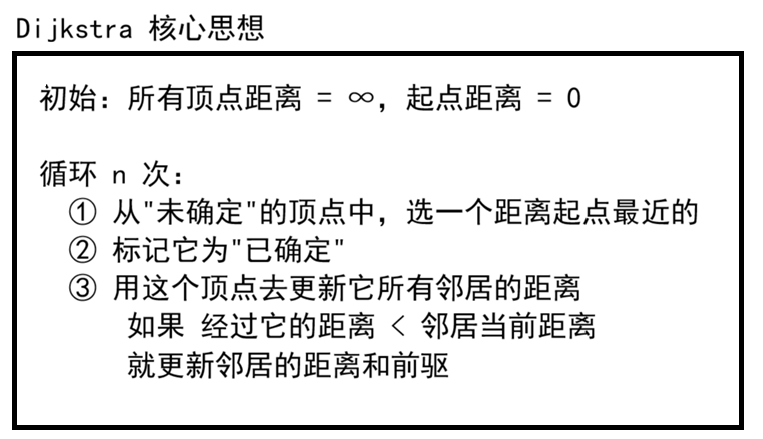
核心思想 :贪心。每次从"未确定最短路径的顶点"中选出距离起点最近的一个,确定为最短,然后用它去更新它的邻居。
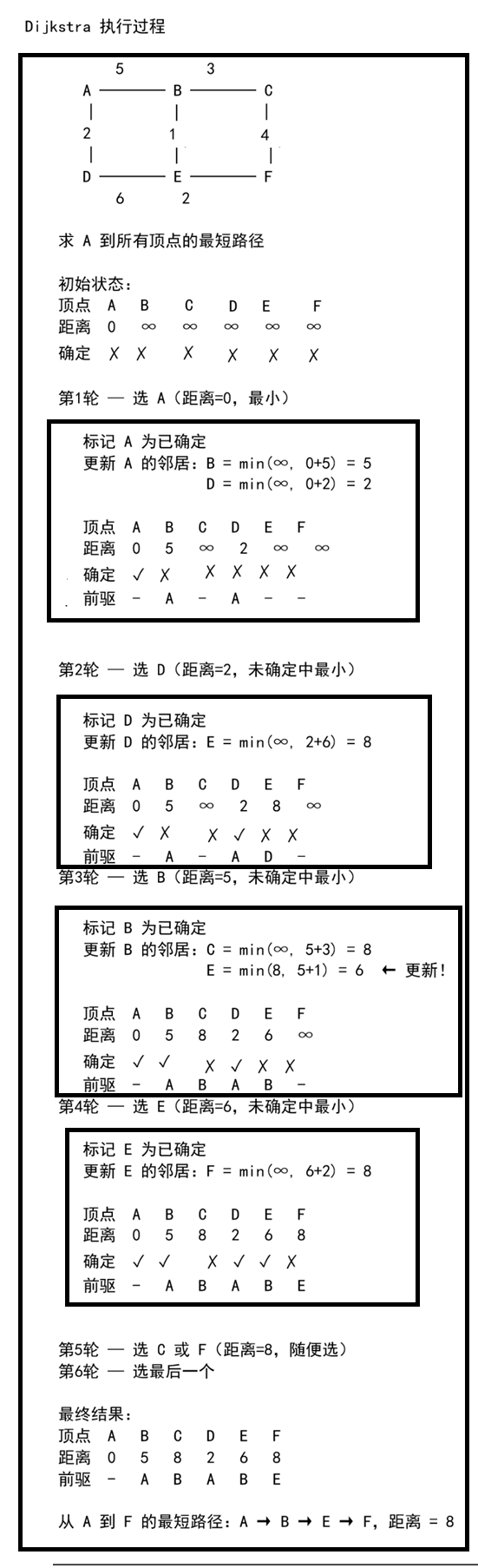
二、算法过程图解
三、Dijkstra 代码实现
cpp
#include <stdio.h>
#include <stdlib.h>
#include <limits.h>
#include <stdbool.h>
#define MAX_V 100
#define INF INT_MAX
typedef struct {
int vertexNum;
int edgeNum;
int matrix[MAX_V][MAX_V]; // 邻接矩阵存储边权
} Graph;
// 初始化图
void initGraph(Graph* g, int n) {
g->vertexNum = n;
g->edgeNum = 0;
for (int i = 0; i < n; i++) {
for (int j = 0; j < n; j++) {
g->matrix[i][j] = (i == j) ? 0 : INF; // 自己到自己是 0,其余 INF
}
}
}
// 添加边
void addEdge(Graph* g, int u, int v, int w) {
g->matrix[u][v] = w;
g->matrix[v][u] = w; // 无向图
g->edgeNum++;
}
// 在未确定顶点中找距离最小的
int findMinDist(int dist[], bool visited[], int n) {
int min = INF;
int minIndex = -1;
for (int i = 0; i < n; i++) {
if (!visited[i] && dist[i] < min) {
min = dist[i];
minIndex = i;
}
}
return minIndex;
}
// Dijkstra 算法
void dijkstra(Graph* g, int start) {
int dist[MAX_V]; // dist[i] = start 到 i 的最短距离
int prev[MAX_V]; // prev[i] = i 的前驱顶点
bool visited[MAX_V]; // visited[i] = i 是否已确定
// 初始化
for (int i = 0; i < g->vertexNum; i++) {
dist[i] = INF;
prev[i] = -1;
visited[i] = false;
}
dist[start] = 0;
// 循环 n 次
for (int count = 0; count < g->vertexNum; count++) {
// ① 选距离最小的未确定顶点
int u = findMinDist(dist, visited, g->vertexNum);
if (u == -1) break; // 剩下的都不可达
visited[u] = true; // ② 标记为已确定
// ③ 用 u 更新邻居
for (int v = 0; v < g->vertexNum; v++) {
if (!visited[v] && g->matrix[u][v] != INF) {
int newDist = dist[u] + g->matrix[u][v];
if (newDist < dist[v]) {
dist[v] = newDist;
prev[v] = u;
}
}
}
}
// 输出结果
printf("===== Dijkstra 结果(起点 %c)=====\n", 'A' + start);
printf("顶点\t最短距离\t前驱\t路径\n");
for (int i = 0; i < g->vertexNum; i++) {
printf("%c\t", 'A' + i);
if (dist[i] == INF) {
printf("∞\t\t-\t不可达\n");
} else {
printf("%d\t\t%c\t", dist[i], prev[i] == -1 ? '-' : ('A' + prev[i]));
// 输出路径
int path[MAX_V], p = 0, cur = i;
while (cur != -1) {
path[p++] = cur;
cur = prev[cur];
}
for (int j = p - 1; j >= 0; j--) {
printf("%c", 'A' + path[j]);
if (j > 0) printf(" → ");
}
printf("\n");
}
}
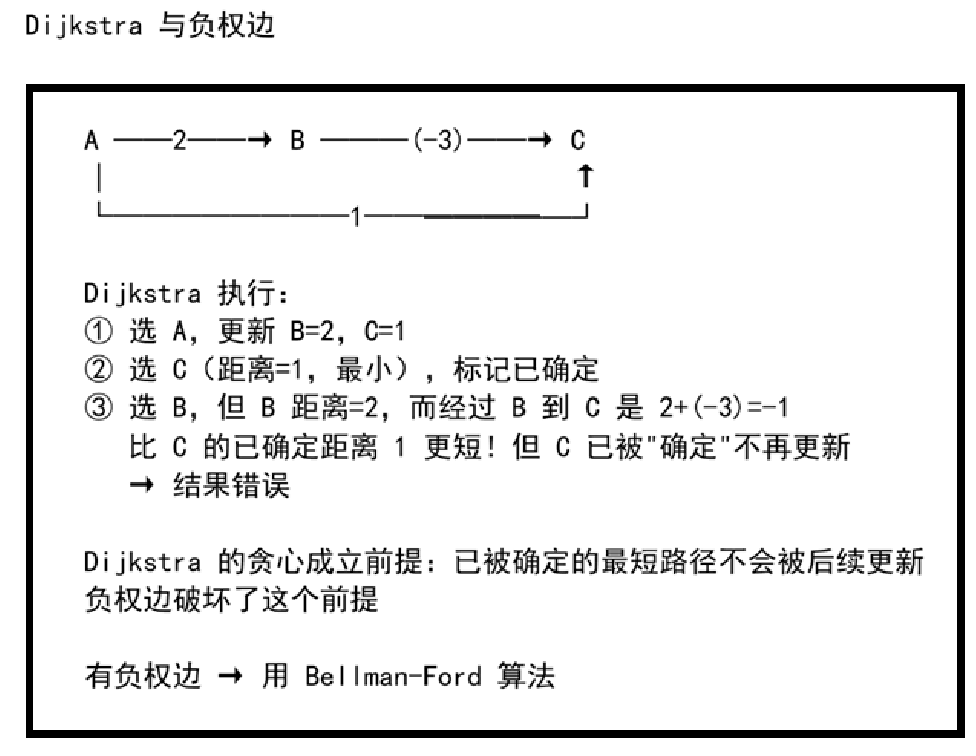
}四、为什么 Dijkstra 不能处理负权边
第二部分:Floyd 算法(多源最短路径)
一、算法思想
Dijkstra 只能求一个起点 到其他所有点的最短路径。如果要任意两点之间的最短路径(比如地图上任意两个城市之间的最短距离),需要调用 n 次 Dijkstra,复杂度 O(n³)。
Floyd 算法一次性算出所有点对的最短路径,复杂度也是 O(n³),但常数因子更小,代码极短。
核心思想 :动态规划。对每一对顶点 (i, j),尝试以另一个顶点 k 作为中转站,看是否能让路径更短。
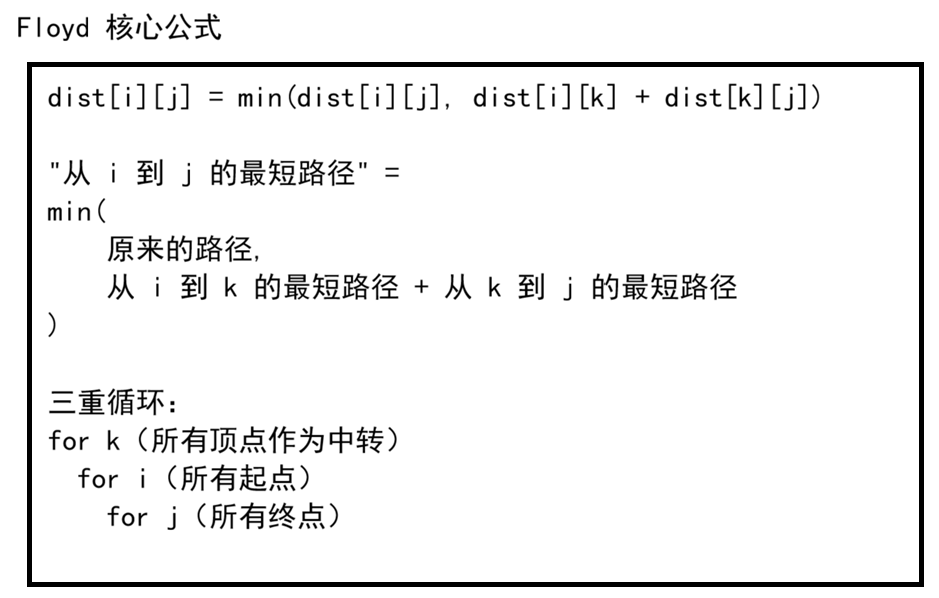
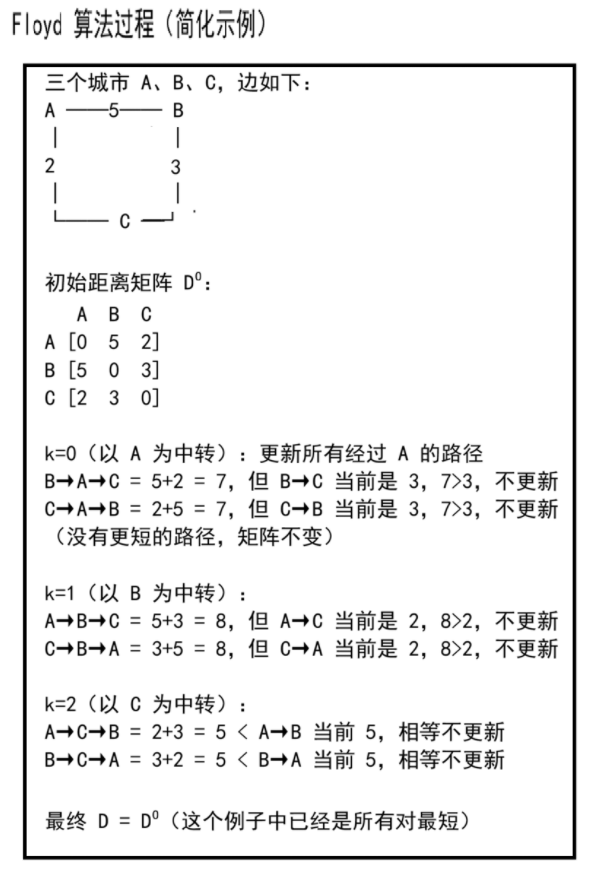
二、算法过程图解
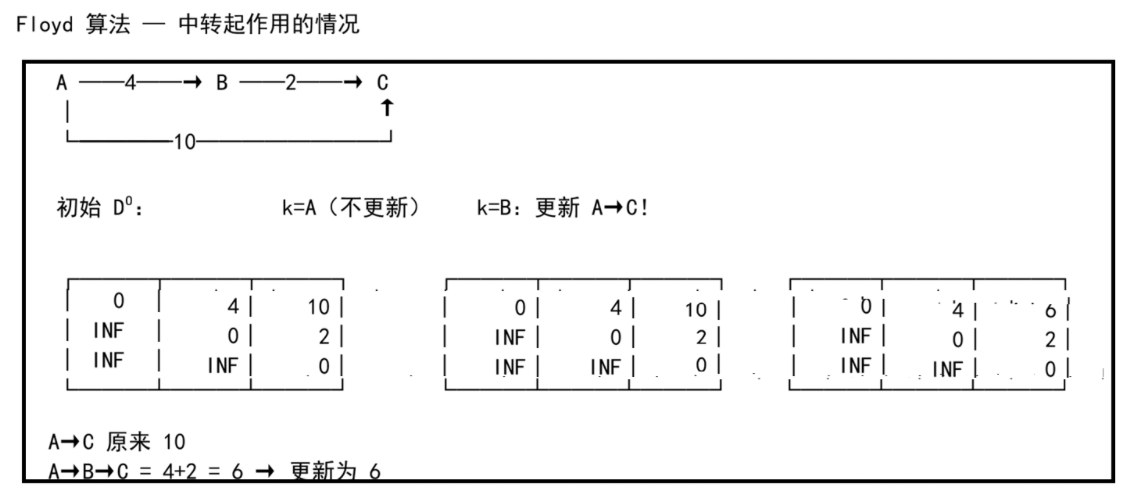
再举一个更明显的例子:
三、Floyd 代码实现
cpp
void floyd(Graph* g) {
int n = g->vertexNum;
int dist[MAX_V][MAX_V]; // dist[i][j] = i 到 j 的最短距离
int path[MAX_V][MAX_V]; // path[i][j] = i 到 j 路径上 j 的前驱
// 初始化
for (int i = 0; i < n; i++) {
for (int j = 0; j < n; j++) {
dist[i][j] = g->matrix[i][j];
if (i != j && g->matrix[i][j] != INF) {
path[i][j] = i; // i→j 直达,前驱是 i
} else {
path[i][j] = -1; // 不可达或无前驱
}
}
}
// 三重循环
for (int k = 0; k < n; k++) {
for (int i = 0; i < n; i++) {
for (int j = 0; j < n; j++) {
if (dist[i][k] != INF && dist[k][j] != INF) {
int newDist = dist[i][k] + dist[k][j];
if (newDist < dist[i][j]) {
dist[i][j] = newDist;
path[i][j] = path[k][j]; // i→j 的路径 = i→k→j
}
}
}
}
}
// 输出结果
printf("\n===== Floyd 结果 =====\n");
printf("最短距离矩阵:\n");
printf(" ");
for (int i = 0; i < n; i++) printf("%4c", 'A' + i);
printf("\n");
for (int i = 0; i < n; i++) {
printf("%c ", 'A' + i);
for (int j = 0; j < n; j++) {
if (dist[i][j] == INF) printf(" ∞");
else printf("%4d", dist[i][j]);
}
printf("\n");
}
}第三部分:Dijkstra vs Floyd
| 对比项 | Dijkstra | Floyd |
|---|---|---|
| 解决问题 | 单源最短路径 | 多源最短路径 |
| 时间复杂度 | O(n²)(朴素) | O(n³) |
| 空间复杂度 | O(n) | O(n²) |
| 负权边 | ❌ 不支持 | ❌ 不支持(但可检测) |
| 实现难度 | 中等 | 极简(5 行核心) |
| 适用场景 | 求一点到其他所有点 | 求所有点对、求图的传递闭包 |
第四部分:完整测试代码
cpp
#include <stdio.h>
#include <stdlib.h>
#include <limits.h>
#include <stdbool.h>
#define MAX_V 100
#define INF INT_MAX
typedef struct {
int vertexNum;
int edgeNum;
int matrix[MAX_V][MAX_V];
} Graph;
void initGraph(Graph* g, int n) {
g->vertexNum = n;
g->edgeNum = 0;
for (int i = 0; i < n; i++)
for (int j = 0; j < n; j++)
g->matrix[i][j] = (i == j) ? 0 : INF;
}
void addEdge(Graph* g, int u, int v, int w) {
g->matrix[u][v] = w;
g->matrix[v][u] = w;
g->edgeNum++;
}
int findMinDist(int dist[], bool visited[], int n) {
int min = INF, minIndex = -1;
for (int i = 0; i < n; i++) {
if (!visited[i] && dist[i] < min) {
min = dist[i];
minIndex = i;
}
}
return minIndex;
}
void dijkstra(Graph* g, int start) {
int dist[MAX_V], prev[MAX_V];
bool visited[MAX_V];
for (int i = 0; i < g->vertexNum; i++) {
dist[i] = INF;
prev[i] = -1;
visited[i] = false;
}
dist[start] = 0;
for (int count = 0; count < g->vertexNum; count++) {
int u = findMinDist(dist, visited, g->vertexNum);
if (u == -1) break;
visited[u] = true;
for (int v = 0; v < g->vertexNum; v++) {
if (!visited[v] && g->matrix[u][v] != INF) {
int newDist = dist[u] + g->matrix[u][v];
if (newDist < dist[v]) {
dist[v] = newDist;
prev[v] = u;
}
}
}
}
printf("===== Dijkstra(起点 %c)=====\n", 'A' + start);
for (int i = 0; i < g->vertexNum; i++) {
printf("%c: ", 'A' + i);
if (dist[i] == INF) printf("不可达\n");
else printf("距离=%d, 前驱=%c\n", dist[i], prev[i] == -1 ? '-' : ('A' + prev[i]));
}
}
void floyd(Graph* g) {
int n = g->vertexNum;
int dist[MAX_V][MAX_V];
for (int i = 0; i < n; i++)
for (int j = 0; j < n; j++)
dist[i][j] = g->matrix[i][j];
for (int k = 0; k < n; k++)
for (int i = 0; i < n; i++)
for (int j = 0; j < n; j++)
if (dist[i][k] != INF && dist[k][j] != INF)
if (dist[i][k] + dist[k][j] < dist[i][j])
dist[i][j] = dist[i][k] + dist[k][j];
printf("\n===== Floyd 最短距离矩阵 =====\n ");
for (int i = 0; i < n; i++) printf("%4c", 'A' + i);
printf("\n");
for (int i = 0; i < n; i++) {
printf("%c ", 'A' + i);
for (int j = 0; j < n; j++) {
if (dist[i][j] == INF) printf(" ∞");
else printf("%4d", dist[i][j]);
}
printf("\n");
}
}
int main() {
Graph g;
initGraph(&g, 6);
addEdge(&g, 0, 1, 5); // A-B: 5
addEdge(&g, 0, 3, 2); // A-D: 2
addEdge(&g, 1, 2, 3); // B-C: 3
addEdge(&g, 1, 4, 1); // B-E: 1
addEdge(&g, 2, 5, 4); // C-F: 4
addEdge(&g, 3, 4, 6); // D-E: 6
addEdge(&g, 4, 5, 2); // E-F: 2
dijkstra(&g, 0);
floyd(&g);
return 0;
}总结
一、核心对比
| 对比项 | Dijkstra | Floyd |
|---|---|---|
| 解决问题 | 一个起点到所有点 | 所有点对 |
| 思想 | 贪心 | 动态规划 |
| 时间复杂度 | O(n²) | O(n³) |
| 负权边 | ❌ | ❌ |
| 代码量 | 30+ 行 | 5 行核心 |
二、一句话记忆
Dijkstra 用贪心每次选最近的未确定顶点更新邻居,求单源最短路径 O(n²)。Floyd 用三重循环枚举中转站,一次性求所有点对最短路径 O(n³)。两者都不支持负权边,有负权边需要用 Bellman-Ford。