目录
1.摘要
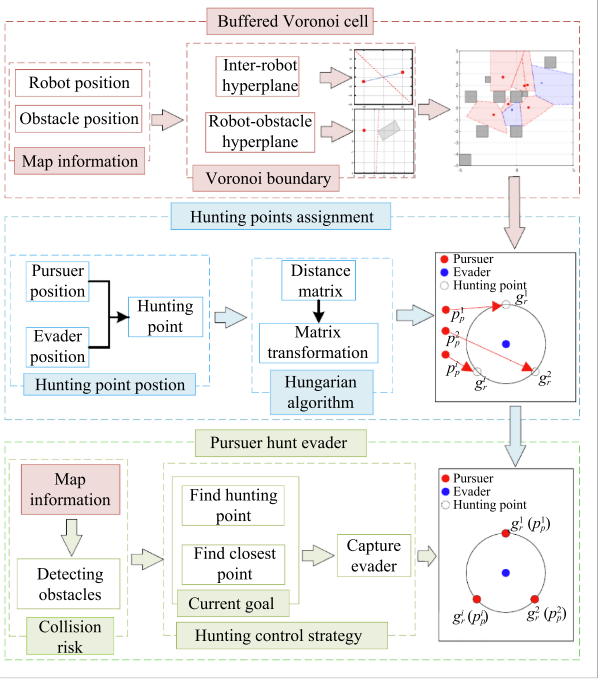
本文提出一种复杂动态环境下基于障碍规避Voronoi单元的多机器人在线协同围捕策略,该方法利用支持向量机构建含缓冲区的Voronoi单元,通过动态更新边界权重确保机器人在安全区域内切运动而不碰撞障碍物或彼此。系统在圆周上均匀生成围捕点,并利用匈牙利算法为捕食者分配最优目标。最后,结合碰撞风险设计围捕控制器以缩短合围时间并提升控制能力。
2.问题描述
在多机器人协同围捕问题中,系统处于含有 m m m 个静态多边形障碍物的有界动态凸环境中。捕食者与逃逸者的动力学模型相同,控制输入分别为 u i P ( t ) \boldsymbol{u}_i^P(t) uiP(t) 和 u j E ( t ) \boldsymbol{u}_j^E(t) ujE(t),其最大速度满足:
∥ u i P ( t ) ∥ ≤ v ^ , ∥ u j E ( t ) ∥ ≤ v ^ \|\boldsymbol{u}_i^P(t)\| \leq \hat{v}, \quad \|\boldsymbol{u}_j^E(t)\| \leq \hat{v} ∥uiP(t)∥≤v^,∥ujE(t)∥≤v^
在每个逃逸者周围生成由 n ˉ = n P / n E \bar{n} = n_P / n_E nˉ=nP/nE 个围捕点组成的圆形合围圈,将围捕问题转化为控制捕食者追踪这些围捕点的挑战。围捕点 ( x H j , y H j ) (x_H^j, y_H^j) (xHj,yHj) 均匀分布在半径为 R R R 圆周上,位置公式为:
{ α = 2 π n ˉ x H j y H j = R cos ( α ⋅ j ) R sin ( α ⋅ j ) + x E j y E j , j = { 1 , 2 , ... , n ˉ } \begin{cases} \alpha = \frac{2\pi}{\bar{n}} \\ \begin{bmatrix} x_H^j \\ y_H^j \end{bmatrix} = \begin{bmatrix} R \cos(\alpha \cdot j) \\ R \sin(\alpha \cdot j) \end{bmatrix} + \begin{bmatrix} x_E^j \\ y_E^j \end{bmatrix}, & j = \{1, 2, \dots, \bar{n}\} \end{cases} ⎩ ⎨ ⎧α=nˉ2πxHjyHj=Rcos(α⋅j)Rsin(α⋅j)+xEjyEj,j={1,2,...,nˉ}
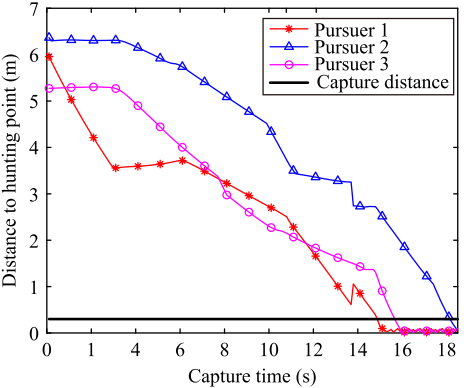
协同围捕目标是确保所有捕食者在 t c t_c tc 时刻移动到对应的围捕点 g H j g_H^j gHj,满足:
∥ P j P ( t c ) − g H j ( t c ) ∥ ≤ r ^ , j = { 1 , 2 , ... , n P } \|P_j^P(t_c) - g_H^j(t_c)\| \leq \hat{r}, \quad j = \{1, 2, \dots, n_P\} ∥PjP(tc)−gHj(tc)∥≤r^,j={1,2,...,nP}
3.围捕点分配
在动态围捕环境中,由于机器人位置实时变化,捕食者在移动中可能会更接近其他非原定目标的逃逸者。为实现全局最优分配并减少总行驶距离,本文采用匈牙利算法 进行围捕点分配,每个逃逸者周围均匀分布 n ˉ \bar{n} nˉ个围捕点。
最小化总距离:
Z = ∑ q = 1 n r ∑ i = 1 n r d i q x i q Z=\sum_{q=1}^{n_r}\sum_{i=1}^{n_r}d_{iq}x_{iq} Z=q=1∑nri=1∑nrdiqxiq
4.避障围捕策略
在分配围捕点后,捕食者需在含缓冲区的Voronoi单元(BVC)无碰撞区域内追踪这些点。若目标围捕点 g H g_H gH在BVC内,捕食者可直接前往;若在BVC外,则需通过求解二次规划 (QP)问题或利用几何投影法,在BVC边界上寻找距离 g H g_H gH 最近的点 g P g_P gP作为临时追踪目标。基于二次规划的方法将问题描述为受限于BVC线性不等式的标准形式:
arg min g E , g y J d i s = 1 2 X T H X + f X s . t . P i P ( t ) T ε j ≤ 0 \begin{aligned}\arg\min_{g_{E},g_{y}}&J_{dis}=\frac12X^THX+fX\\\mathrm{s.t.}&P_i^P(t)^T\varepsilon_j\leq0\end{aligned} arggE,gymins.t.Jdis=21XTHX+fXPiP(t)Tεj≤0
其中, X = g x , g y T , H X=g_x,g_y^T,H X=gx,gyT,H 为单位阵, f = − h x , − h y T f=-h_x,-h_y^T f=−hx,−hyT。而几何法则是通过计算围捕点在BVC边界线段上的投影来快速确定 g P ∘ g_{P\circ} gP∘
结合避障与直接驱近,本文设计切换协同控制策略,当捕食者与障碍物距离 d ˉ i \bar{d}_i dˉi 大于安全阈值 d ˇ \check{d} dˇ时,直接向围捕点移动;否则,切换为沿BVC安全区域边界移动:
u i P = { v ^ i ⋅ P i P − g i H ∥ P i P − g i H ∥ , d ˉ i > d ˘ v ^ i ⋅ P i P − g P ∥ P i P − g P ∥ , d ˉ i ≤ d ˘ u_i^P=\begin{cases}\hat{v}_i\cdot\frac{P_i^P-g_i^H}{\|P_i^P-g_i^H\|},&\bar{d}_i>\breve{d}\\\hat{v}_i\cdot\frac{P_i^P-g_P}{\|P_i^P-g_P\|},&\bar{d}_i\leq\breve{d}\end{cases} uiP=⎩ ⎨ ⎧v^i⋅∥PiP−giH∥PiP−giH,v^i⋅∥PiP−gP∥PiP−gP,dˉi>d˘dˉi≤d˘
逃逸者为最大化生存空间,其控制策略被驱动向自身BVC区域的质心 C b C_b Cb 逃逸:
u j E ( t ) = C b − P j E ∥ C b − P j E ∥ u_j^E(t)=\frac{C_b-P_j^E}{\|C_b-P_j^E\|} ujE(t)=∥Cb−PjE∥Cb−PjE
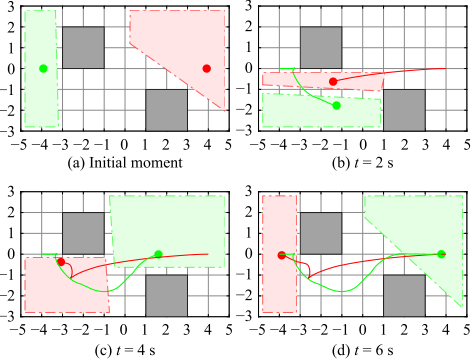
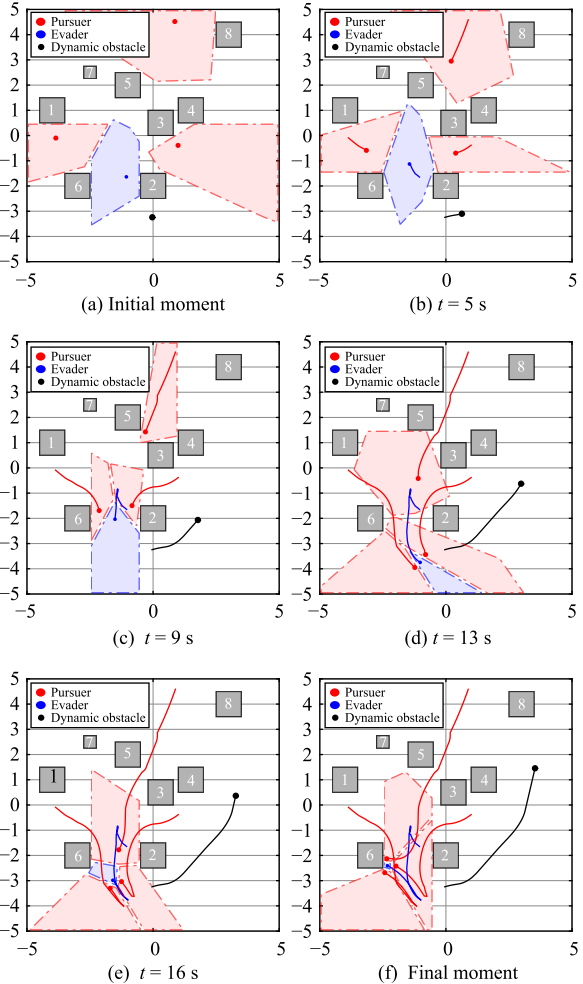
5.论文结果
6.参考文献
Niu Z, Yao W, Jin Y, et al. Integrated task assignment and trajectory planning for a massive number of agents based on bilayer-coupled mean field gamesJ. IEEE Transactions on Automation Science and Engineering, 2024, 22: 1833-1852.
7.算法辅导·应用定制·读者交流
xx