导读: 本文是一篇针对矿山安全领域"智慧矿山"建设的系统性技术深度解析文章。全文覆盖UWB超宽带定位技术、AI行为视觉识别、边缘计算、应急救援路径规划、安全培训管控等核心模块,并附详细技术参数对比与架构设计思路。无论你是矿山安全技术工程师、AI算法工程师、工业物联网架构师,还是智慧矿山方案设计人员,本文都值得深度收藏!
📑 目录
- 一、背景与痛点:传统矿山安全管理为何失效
- 二、政策驱动:智慧矿山建设的"硬性要求"
- 三、系统总体架构:五层技术体系全解析
- 四、UWB精准定位系统:厘米级定位的技术实现路径
- 五、AI行为安全识别系统:让摄像头"看懂"危险
- 六、应急逃生引导:灾害发生后150ms内响应的秘密
- 七、安全培训与准入管理:从"人工核查"到"闸机联动"
- 八、技术性能量化指标汇总
- 九、建设价值与预期收益
- 十、总结与展望
一、背景与痛点:传统矿山安全管理为何失效 {#一}
1.1 矿山安全事故的隐形代价
每一起矿山事故背后,都是技术滞后与管理缺失的双重失守。据统计,全国矿山每年因违章作业、定位失效、应急响应迟缓引发的安全事故,造成的直接经济损失与社会代价难以估量。更关键的是,大量事故并非"不可预防"------它们完全可以通过精准感知与智能化拦截加以阻断。
真正的问题在于:现有安全系统的技术架构已经远远落后于生产需求。
1.2 传统定位技术的"致命三宗罪"
目前矿山普遍部署的人员定位系统,大多基于半有源RFID或局部WiFi基站搭建。这套系统在实际使用中暴露出三大核心问题:
问题一:定位精度严重不足
在井下复杂的巷道物理环境中:
- 巷道壁不规则反射、金属支护网电磁屏蔽、高湿度空气衰减,共同导致严重的多径效应与非视距(NLOS)传播
- RSSI(接收信号强度指示)产生非线性剧烈波动,定位算法出现严重畸变
- 实际定位精度长期维持在10米至15米之间,无法满足精细化安全管理需求
问题二:数据时延大,位置严重滞后
- 传统TDMA协议在多节点并发时碰撞概率呈指数级上升
- 重传机制导致端到端数据传输时延超过5秒
- 应急场景下,系统显示的位置与人员实际位置存在巨大空间滞后
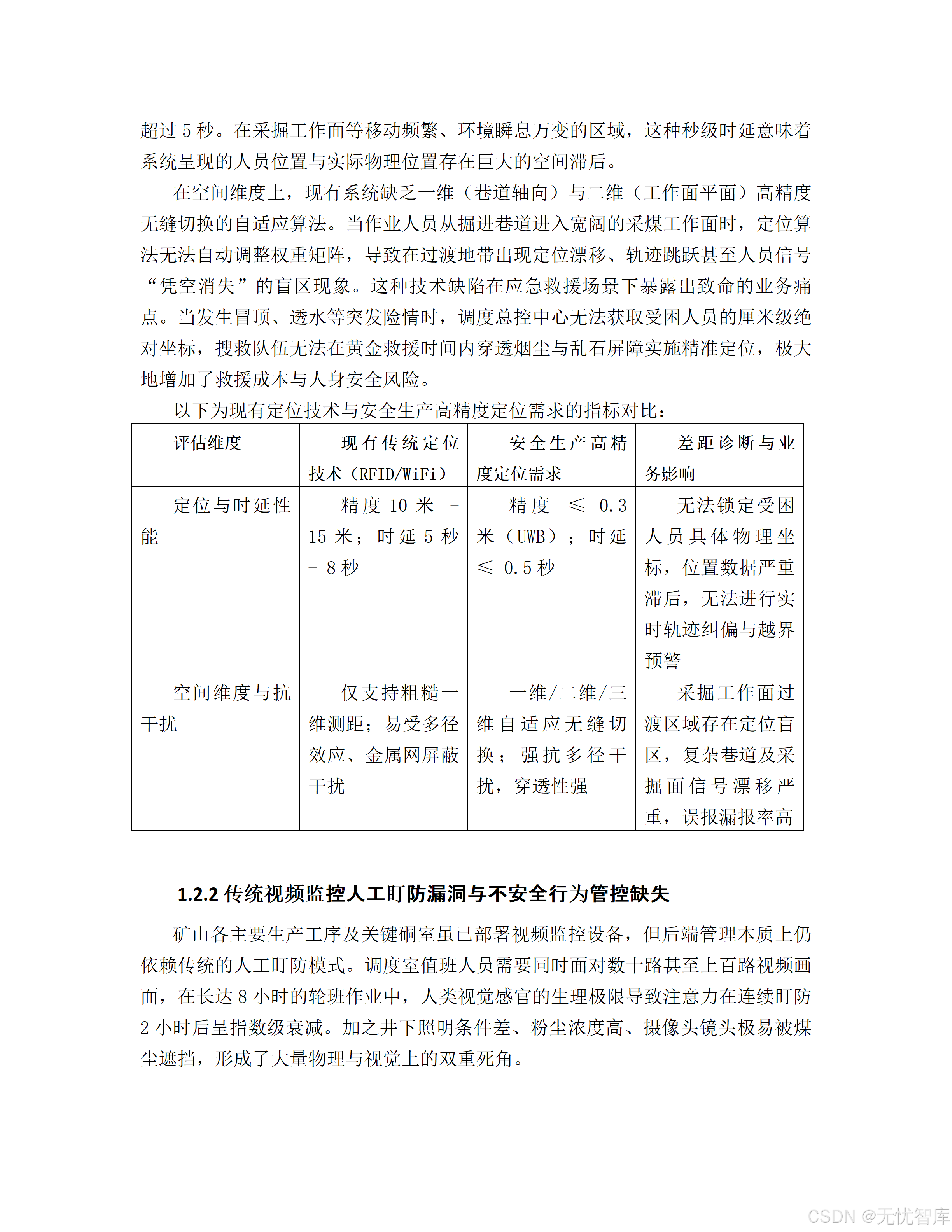
问题三:空间维度切换盲区
- 现有系统缺乏一维(巷道轴向)与二维(工作面平面)高精度无缝切换的自适应算法
- 当作业人员从掘进巷道进入宽阔采煤工作面时,定位坐标出现"凭空消失"的盲区现象
- 应急救援时无法获取被困人员的厘米级绝对坐标,极大延误黄金救援时间
| 评估维度 | 现有传统定位(RFID/WiFi) | 安全生产高精度需求 | 差距诊断 |
|---|---|---|---|
| 定位精度 | 10~15米 | ≤0.3米(UWB) | 相差50倍 |
| 时延 | 5~8秒 | ≤0.5秒 | 相差10倍 |
| 空间维度 | 仅粗糙一维 | 1D/2D/3D自适应切换 | 维度缺失 |
| 抗干扰能力 | 易受多径、金属网屏蔽 | 强抗多径,穿透性强 | 差距显著 |
1.3 传统视频监控的"30%漏报黑洞"
矿山各主要生产工序虽已部署视频监控设备,但本质上仍依赖人工盯防模式:
- 调度室值班人员需同时面对数十路甚至上百路视频画面
- 人类视觉感官的生理极限导致注意力在连续盯防2小时后呈指数级衰减
- 井下照明差、粉尘浓度高,摄像头镜头极易被煤尘遮挡
结果触目惊心:
"未佩戴安全帽"、"违规跨越运行中的皮带"、"单人违规进入盲巷作业"等典型高危违章行为,漏报率已超过30%!
更致命的是,这种"事后调取录像、事后追责处罚"的被动管理模式,完全割裂了安全管控中"事前预防、事中阻断、事后审计"的协同机制。当不安全行为发生时,没有任何机制能在第一时间向现场违规人员发送声光警告,也无法向控制箱下发停机指令。
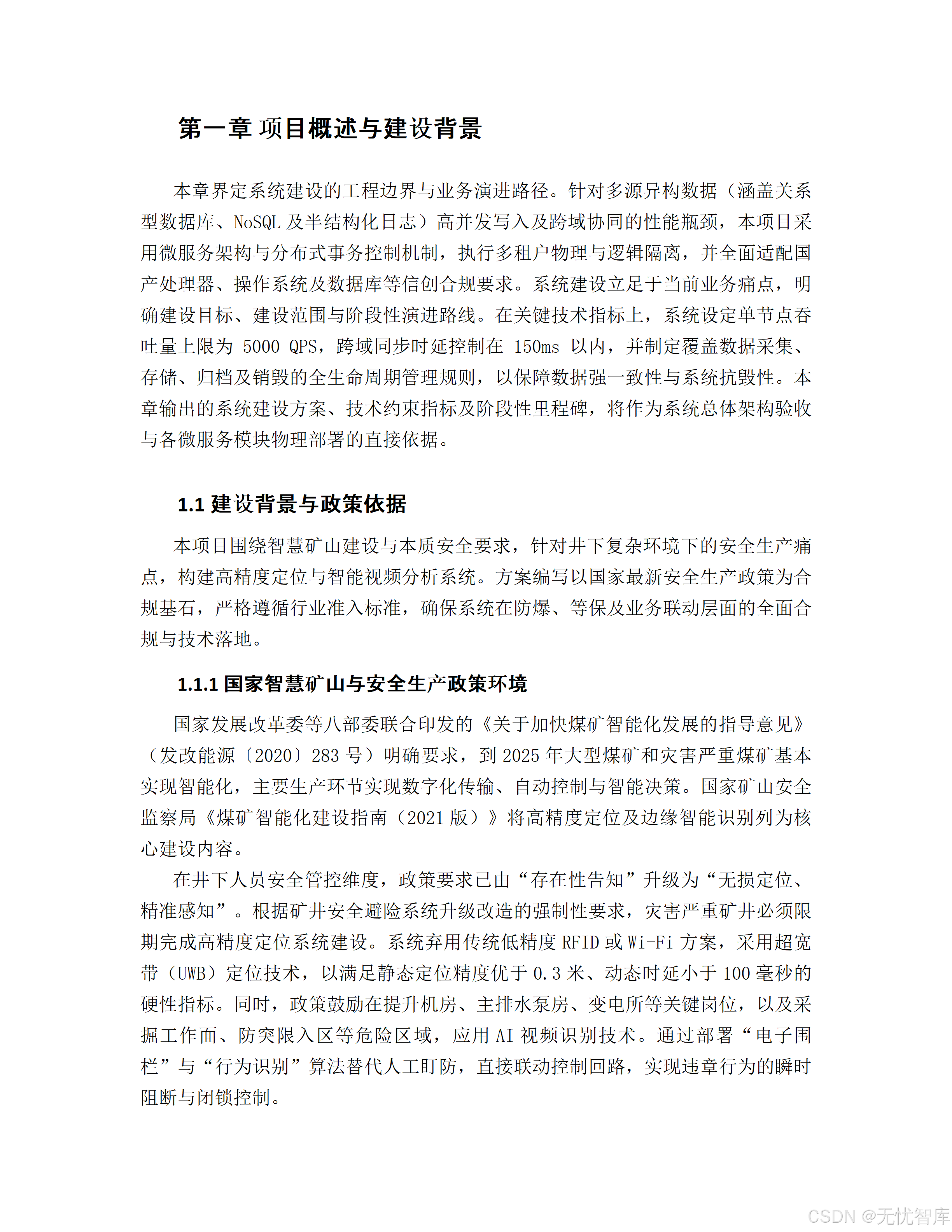
二、政策驱动:智慧矿山建设的"硬性要求" {#二}
2.1 国家政策强制推动
国家对矿山智能化建设的政策驱动已从"鼓励"升级为"强制":
- 《关于加快煤矿智能化发展的指导意见》(发改能源〔2020〕283号):明确要求到2025年大型煤矿和灾害严重煤矿基本实现智能化,主要生产环节实现数字化传输、自动控制与智能决策
- 《煤矿智能化建设指南(2021版)》:将高精度定位及边缘智能识别列为核心建设内容
- 井下人员安全管控维度:政策要求已由"存在性告知"升级为"无损定位、精准感知"
2.2 行业准入标准硬性约束
系统建设必须满足以下强制性标准:
| 标准/规范 | 核心要求 | 对应技术指标 |
|---|---|---|
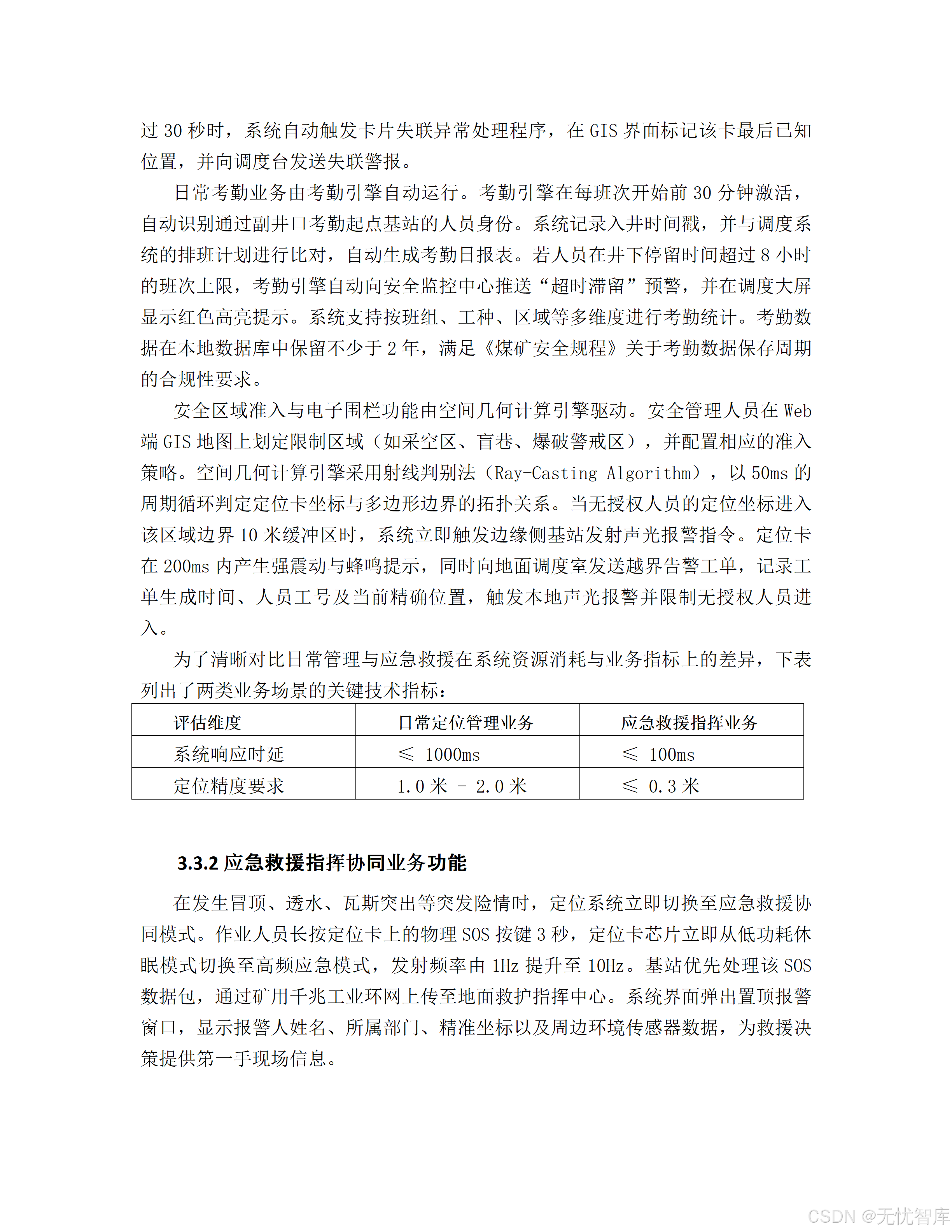
| 《煤矿井下人员定位系统通用技术条件》(GB 13101) | 定位精度与时延规范 | 静态≤0.3m,动态≤100ms |
| 《煤矿安全规程(2022版)》 | 安全准入与行为规范 | 违规行为实时报警 |
| 矿用防爆标准(Ex ib I Mb) | 设备防爆等级 | 最高本质安全型 |
| 等保2.0三级标准 | 网络安全等级 | SM4算法加密传输 |
| 《信息安全技术 网络安全等级保护基本要求》(GB/T 22239-2019) | 网络安全防护 | 工业级防火墙+SM4加密 |
2.3 不建设的代价
如果不建设,矿山将持续面临:
- 合规风险:无法通过国家智能化验收,面临行政处罚与停产整改
- 生产安全风险:应急救援响应慢、违章作业无法即时阻断
- 经济损失风险:一旦发生安全事故,直接经济损失与社会责任代价不可估量
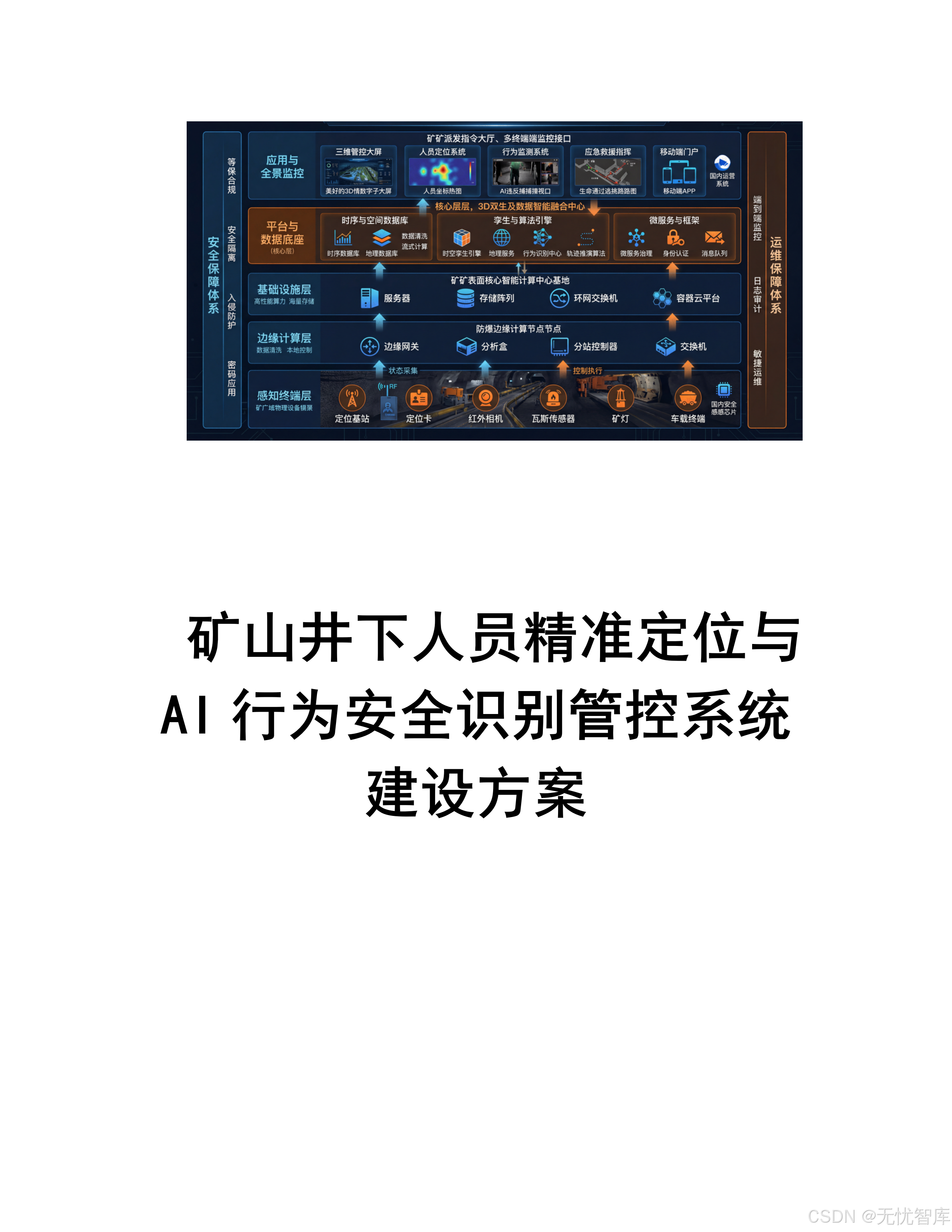
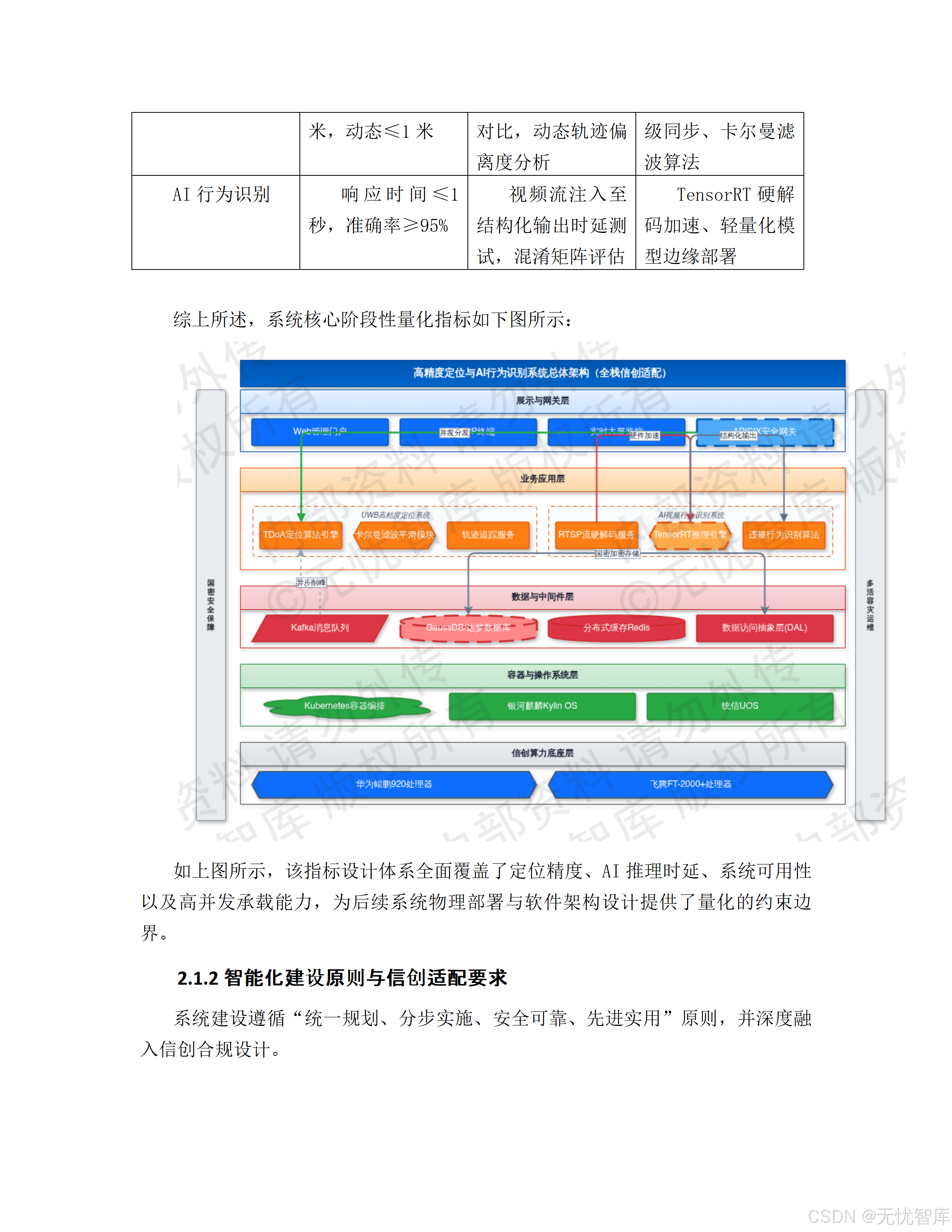
三、系统总体架构:五层技术体系全解析 {#三}
3.1 架构设计哲学
本系统针对井下复杂工况与高并发业务需求,采用**"UWB+AI+3D GIS一张图"的融合架构**,构建标准化、高冗余的五层技术体系。
核心非功能性需求(NFR)指标:
- 服务可用性SLA:≥99.99%
- 单节点吞吐:≥5000 QPS
- 核心接口响应时延:≤100ms
- 定位并发终端:≥5000个(5Hz上报频率)
- 系统吞吐量(TPS):≥25000
- 数据丢包率:≤0.1%
3.2 五层技术架构详解
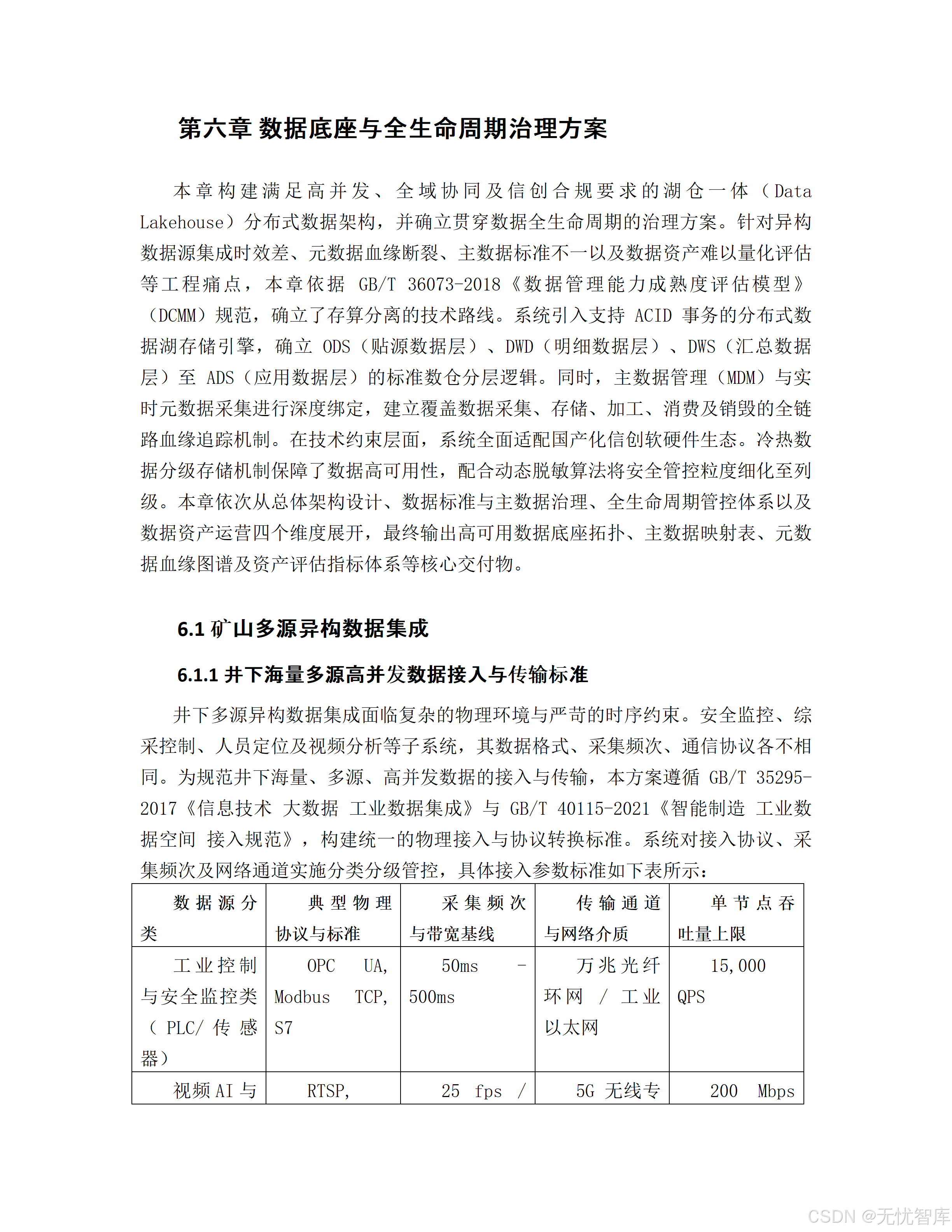
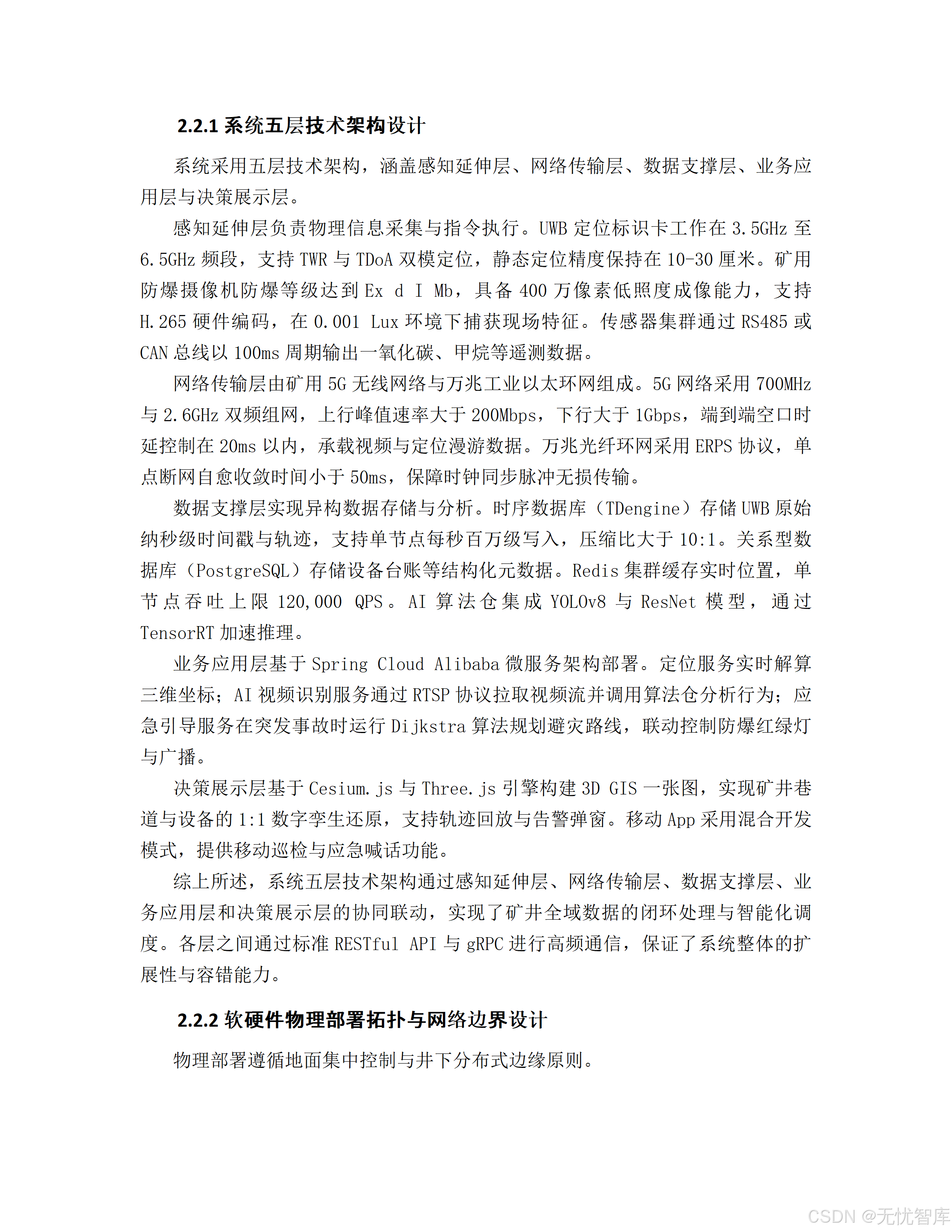
第一层:感知延伸层
感知延伸层是系统的"神经末梢",负责物理信息采集与指令执行:
- UWB定位标识卡:工作在3.5GHz至6.5GHz频段,支持TWR与TDoA双模定位,静态定位精度10~30厘米
- 矿用防爆摄像机 :防爆等级Ex d I Mb,400万像素低照度成像,支持H.265硬件编码,在0.001 Lux极暗环境下仍可捕获现场特征
- 多参数传感器集群:通过RS485或CAN总线以100ms周期输出一氧化碳、甲烷等遥测数据
第二层:网络传输层
网络传输层构建矿山数据高速公路:
- 矿用5G无线网络:700MHz与2.6GHz双频组网,上行峰值速率>200Mbps,下行>1Gbps,端到端空口时延≤20ms
- 万兆工业以太环网 :采用ERPS协议,单点断网自愈收敛时间<50ms,保障时钟同步脉冲无损传输
第三层:数据支撑层
数据支撑层实现异构数据的高效存储与分析:
| 组件 | 技术选型 | 核心指标 | 用途 |
|---|---|---|---|
| 时序数据库 | TDengine | 单节点百万级/秒写入,压缩比>10:1 | UWB原始纳秒级时间戳与轨迹 |
| 关系型数据库 | PostgreSQL | 标准SQL兼容,信创适配GaussDB/达梦DM8 | 设备台账等结构化元数据 |
| 高速缓存 | Redis集群 | 单节点吞吐上限120,000 QPS | 实时位置缓存 |
| 消息队列 | Apache Kafka | 高吞吐异步削峰 | 定位与告警事件解耦 |
| AI算法仓 | YOLOv8+ResNet | TensorRT加速推理 | 行为识别模型服务 |
第四层:业务应用层
基于Spring Cloud Alibaba微服务架构部署:
- 定位服务:实时解算三维坐标,输出高精度时空轨迹
- AI视频识别服务:通过RTSP协议拉取视频流,调用算法仓分析行为
- 应急引导服务:突发事故时运行Dijkstra算法规划避灾路线,联动控制防爆红绿灯与广播
第五层:决策展示层
- 3D GIS一张图 :基于Cesium.js与Three.js引擎,实现矿井巷道与设备的1:1数字孪生还原,支持轨迹回放与告警弹窗
- 移动App:混合开发模式,提供移动巡检与应急喊话功能
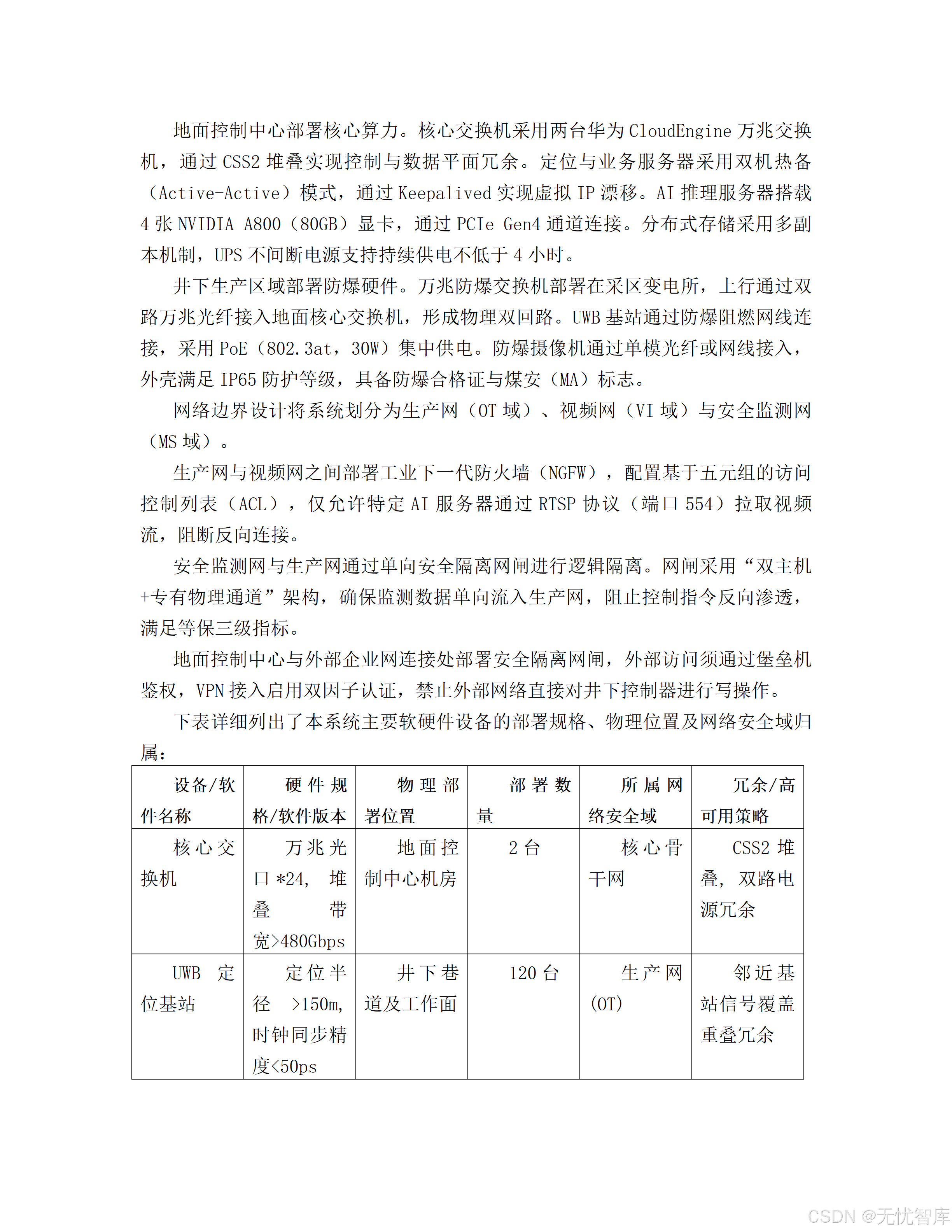
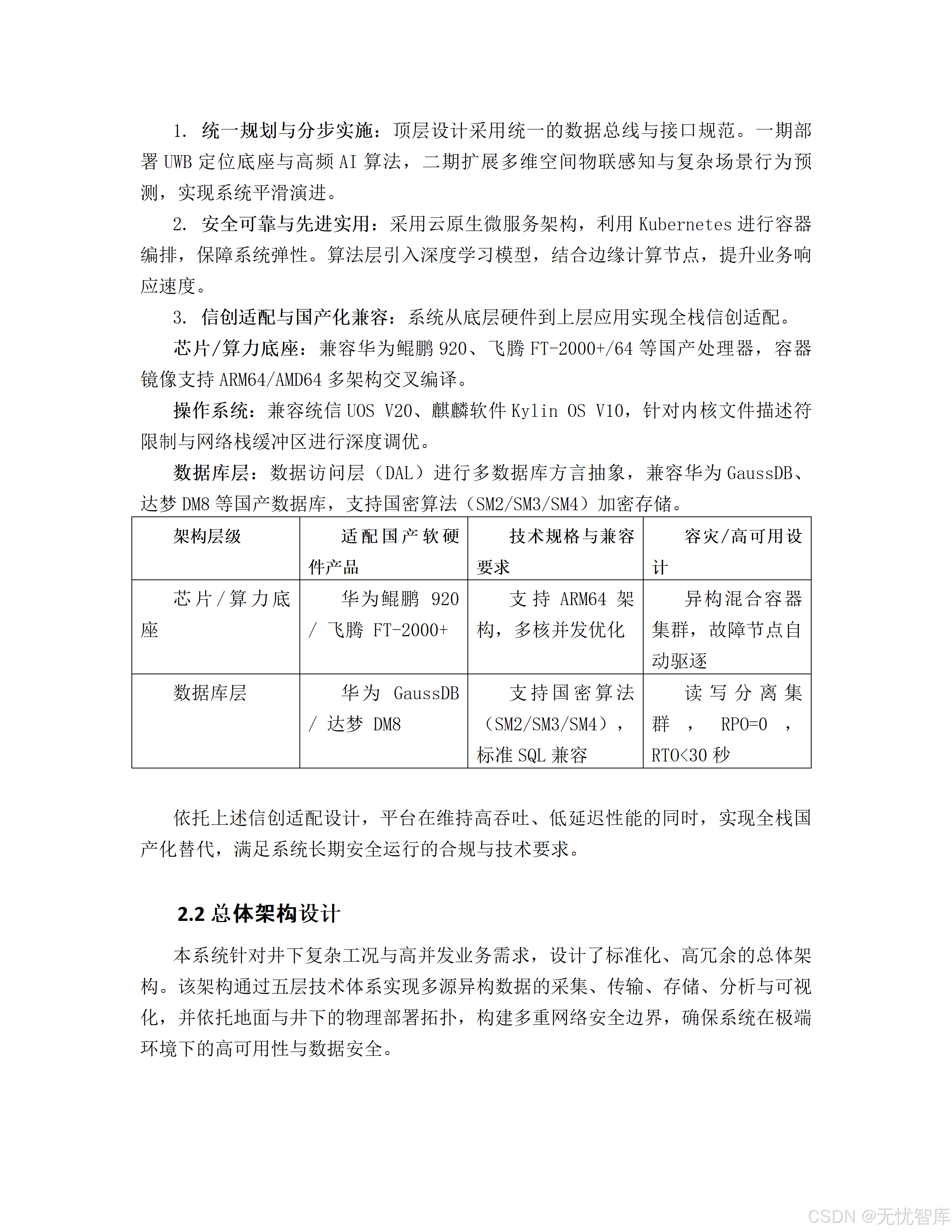
3.3 信创适配:全栈国产化
系统从底层硬件到上层应用实现全栈信创适配:
| 架构层级 | 适配国产产品 | 技术规格 | 高可用设计 |
|---|---|---|---|
| 芯片/算力底座 | 华为鲲鹏920 / 飞腾FT-2000+ | ARM64架构,多核并发优化 | 异构混合容器集群,故障节点自动驱逐 |
| 操作系统 | 统信UOS V20 / 麒麟Kylin OS V10 | 内核深度调优 | --- |
| 数据库层 | 华为GaussDB / 达梦DM8 | 国密算法SM2/SM3/SM4 | 读写分离集群,RPO=0,RTO<30秒 |
| 容器编排 | Kubernetes(信创适配版) | ARM64/AMD64多架构交叉编译 | 多活容器部署,自愈时间≤30秒 |
四、UWB精准定位系统:厘米级定位的技术实现路径 {#四}
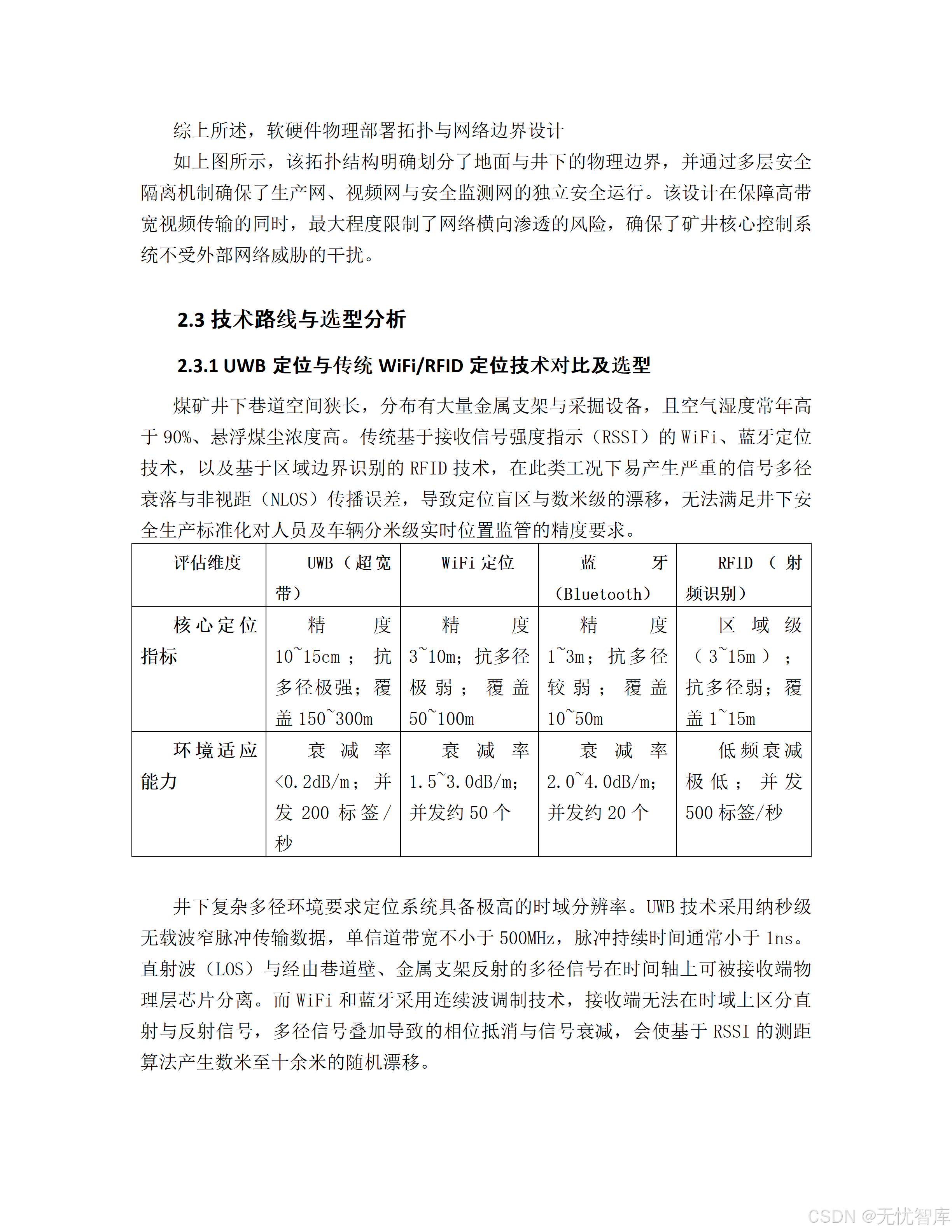
4.1 为什么选择UWB而非其他技术?
这是本系统中最核心的技术选型决策。让我们用数据说话:
| 评估维度 | UWB(超宽带) | WiFi定位 | 蓝牙 | RFID |
|---|---|---|---|---|
| 核心精度 | 10~15cm | 3~10m | 1~3m | 区域级(3~15m) |
| 信号带宽 | ≥500MHz窄脉冲 | 连续波调制 | 连续波调制 | 低频窄带 |
| 抗多径能力 | 极强 | 极弱 | 较弱 | 弱 |
| 覆盖半径 | 150~300m | 50~100m | 10~50m | 1~15m |
| 并发容量 | 200标签/秒 | ~50个 | ~20个 | 500标签/秒(漏卡率高) |
| 信号衰减率 | <0.2dB/m | 1.5~3.0dB/m | 2.0~4.0dB/m | 低频极低 |
| 井下适用性 | 最优 | 差 | 较差 | 差 |
UWB的核心优势在于物理层:采用纳秒级无载波窄脉冲传输数据,单信道带宽≥500MHz,脉冲持续时间<1ns。这意味着直射波与反射波在时间轴上可被物理层芯片分离------而WiFi和蓝牙采用连续波调制,根本无法在时域上区分直射与反射信号。
在粉尘浓度1000mg/m³、相对湿度95%的模拟巷道实测中:
- UWB信号附加衰减率:<0.15dB/m
- 2.4GHz WiFi信号附加衰减率:>1.8dB/m(易引发连接中断与定位失效)
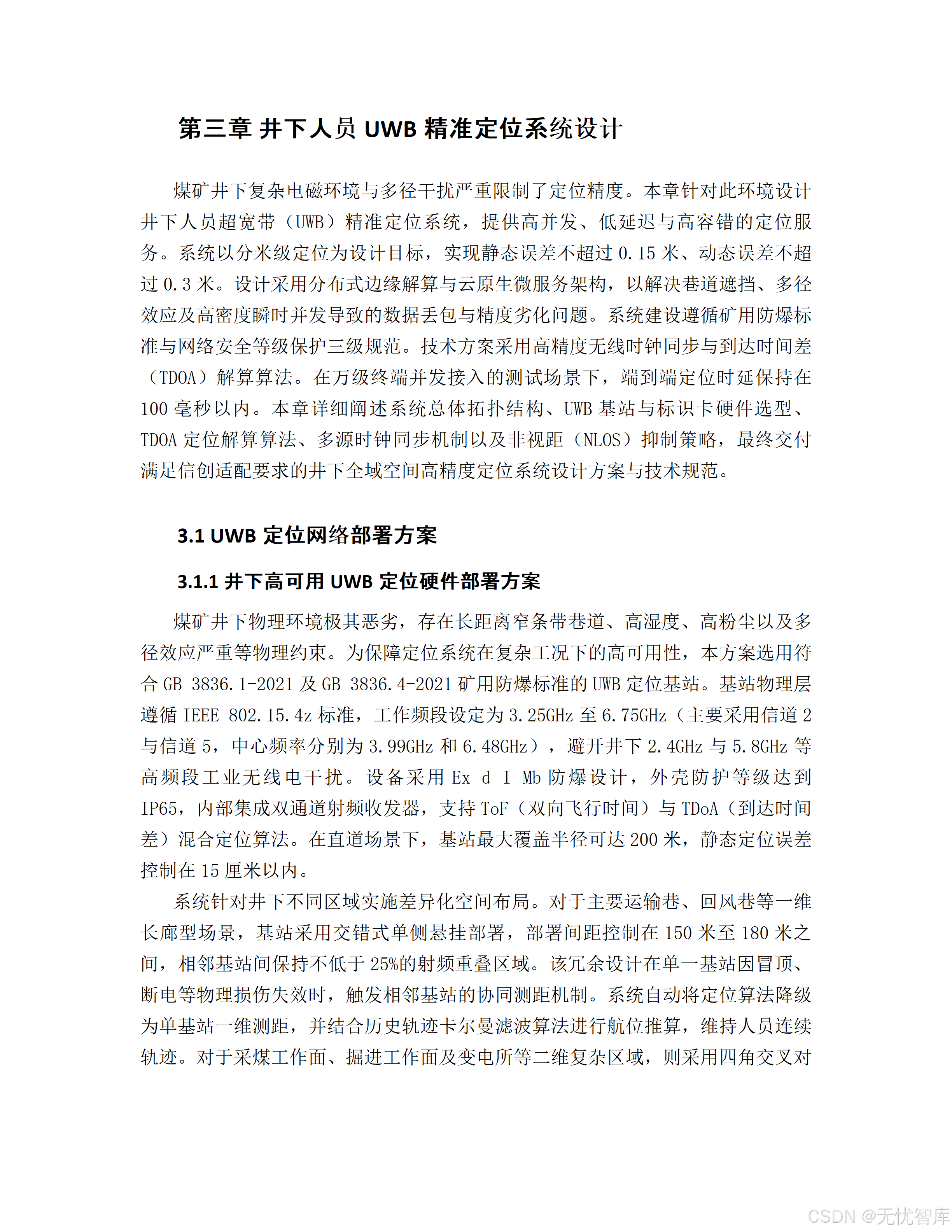
4.2 UWB定位网络部署方案
硬件选型标准
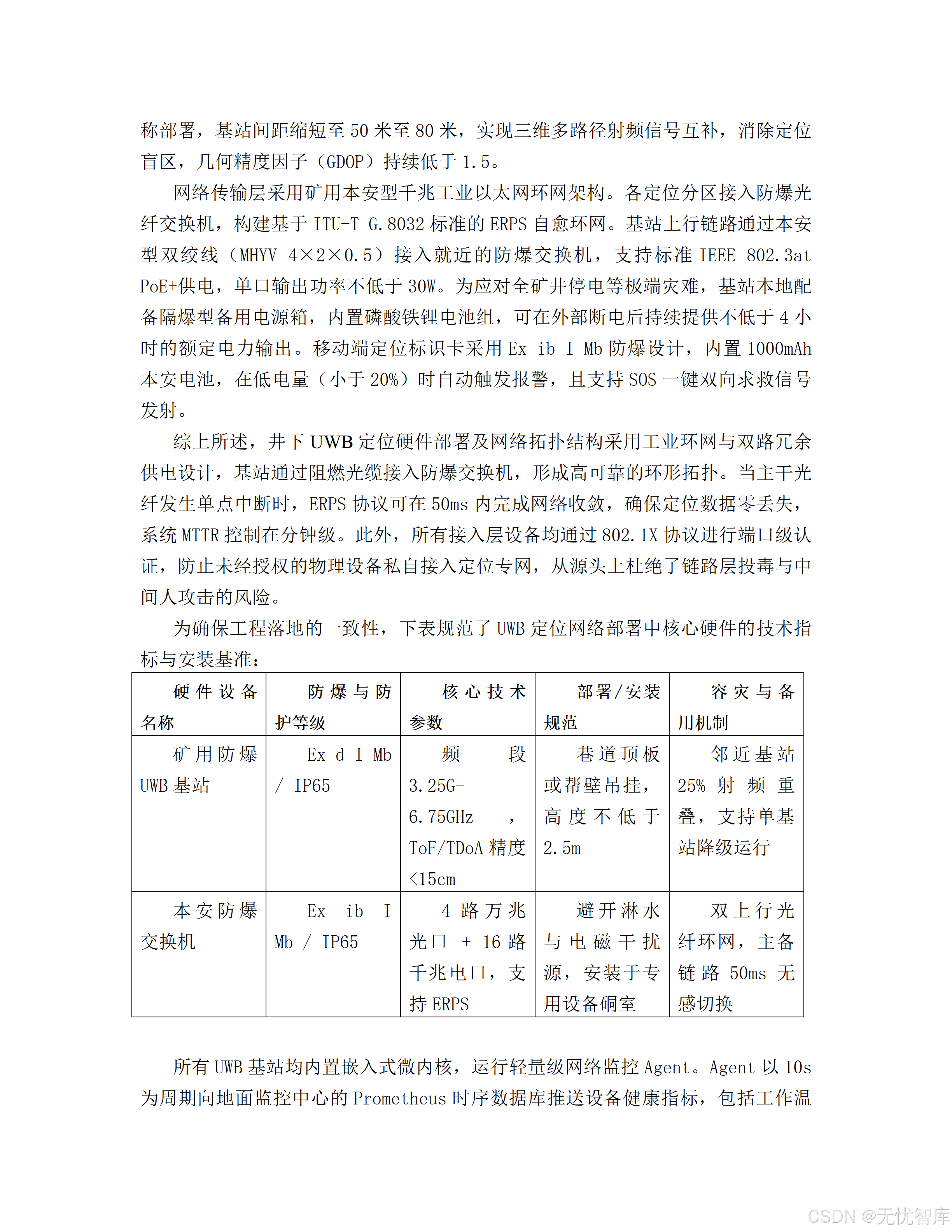
矿用防爆UWB定位基站的核心技术指标:
- 防爆等级:Ex d I Mb,防护等级IP65
- 工作频段:3.25GHz至6.75GHz(主要采用信道2:3.99GHz,信道5:6.48GHz)
- 物理层标准:IEEE 802.15.4z
- 最大覆盖半径:直道场景下≥200米,静态定位误差≤15cm
- 本地备用电源:磷酸铁锂电池,断电后持续供电≥4小时
差异化空间部署策略
主运输巷/回风巷(一维长廊型):
- 交错式单侧悬挂,部署间距150~180米
- 相邻基站保持≥25%射频重叠区域(冗余设计)
- 单基站故障时自动降级为单基站一维测距,配合卡尔曼滤波进行航位推算
采煤/掘进工作面(二维复杂区域):
- 四角交叉对称部署,基站间距缩短至50~80米
- 三维多路径射频信号互补,消除定位盲区
- 几何精度因子(GDOP)持续低于1.5
4.3 核心定位算法:TDoA + 卡尔曼滤波 + NLOS抑制
到达时间差(TDoA)解算流程
定位引擎采用分布式多线程架构,主要由三层组成:
数据接入层:
- 通过TCP/IP接收各分站原始UWB数据包,提取纳秒级到达时间差
- 基于主基站定时广播的时钟同步补偿算法,将分站间时钟同步误差控制在50皮秒以内
数据解算层(加权最小二乘法WLS):
- 通过泰勒级数展开,将非线性双曲方程组转化为线性方程组迭代求解
- 根据RSSI和GDOP动态调整权重矩阵W,降低边缘分站测距误差影响
滤波平滑层(自适应卡尔曼滤波AKF):
系统引入Sage-Husa自适应滤波算法,通过实时监测测量残差序列,动态调整过程噪声协方差矩阵Q与测量噪声协方差矩阵R:
- 静止状态:调小Q值并增大R值,抑制坐标零点漂移
- 运动状态:调大Q值并减小R值,提升轨迹跟随灵敏度
- 解算时延控制在50毫秒以内,定位解算输出频次≥20Hz
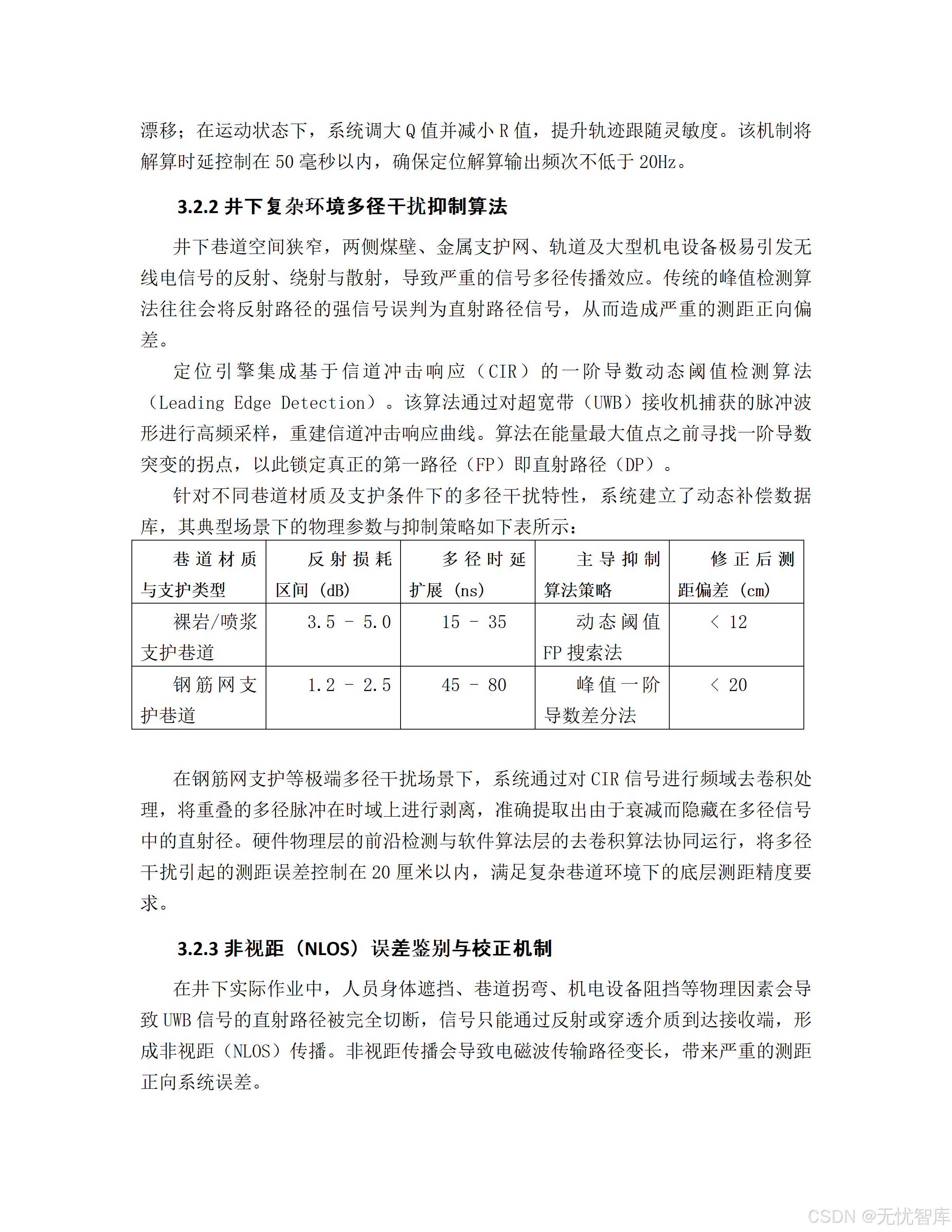
多径干扰抑制:Leading Edge Detection算法
针对钢筋网支护等极端多径干扰场景,系统集成基于信道冲击响应(CIR)的一阶导数动态阈值检测算法:
| 巷道类型 | 反射损耗 | 多径时延扩展 | 抑制算法 | 修正后测距偏差 |
|---|---|---|---|---|
| 裸岩/喷浆支护 | 3.5~5.0dB | 15~35ns | 动态阈值FP搜索法 | <12cm |
| 钢筋网支护 | 1.2~2.5dB | 45~80ns | 峰值一阶导数差分法 | <20cm |
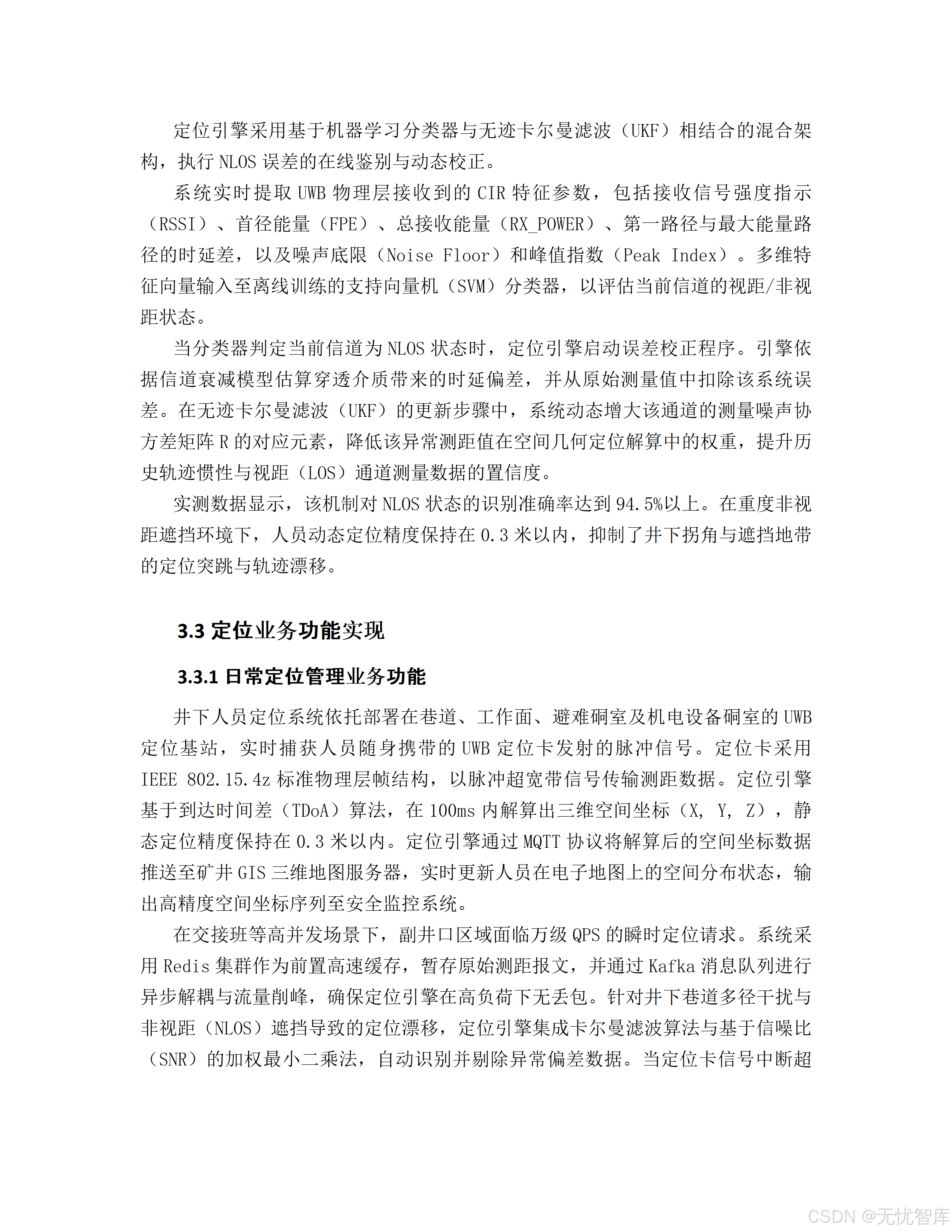
NLOS误差鉴别与校正:SVM分类器 + 无迹卡尔曼滤波
当人员身体遮挡、巷道拐弯导致UWB信号直射路径被切断时,系统采用**SVM分类器+无迹卡尔曼滤波(UKF)**混合架构:
- 实时提取CIR特征参数(RSSI、FPE、RX_POWER、噪声底限等)
- 多维特征向量输入SVM分类器,评估当前信道LOS/NLOS状态
- 判定NLOS时,引擎依据信道衰减模型估算穿透介质时延偏差并扣除
- 在UKF更新步骤中动态增大该通道测量噪声协方差R,降低异常测距值权重
实测结果:
- NLOS状态识别准确率:≥94.5%
- 重度非视距遮挡环境下,动态定位精度:≤0.3米
4.4 高并发场景处理:TDMA + Redis + Kafka
交接班时副井口会在短时间内聚集大量人员,形成瞬时"定位请求洪峰":
- UWB基站采用TDMA与动态时隙分配,将1秒时域划分为1000个微时隙
- 10Hz定位刷新率下,单基站支持100个并发标签稳定工作
- 降级至2Hz刷新率时,并发容量线性扩展至500个标签,漏包率<0.3%
- 上层通过Redis集群前置缓存(120,000 QPS) + Kafka异步解耦,保障引擎无丢包
对比传统RFID:ALOHA协议在标签密集区域漏卡率升至15%以上,形成鲜明对比。
五、AI行为安全识别系统:让摄像头"看懂"危险 {#五}
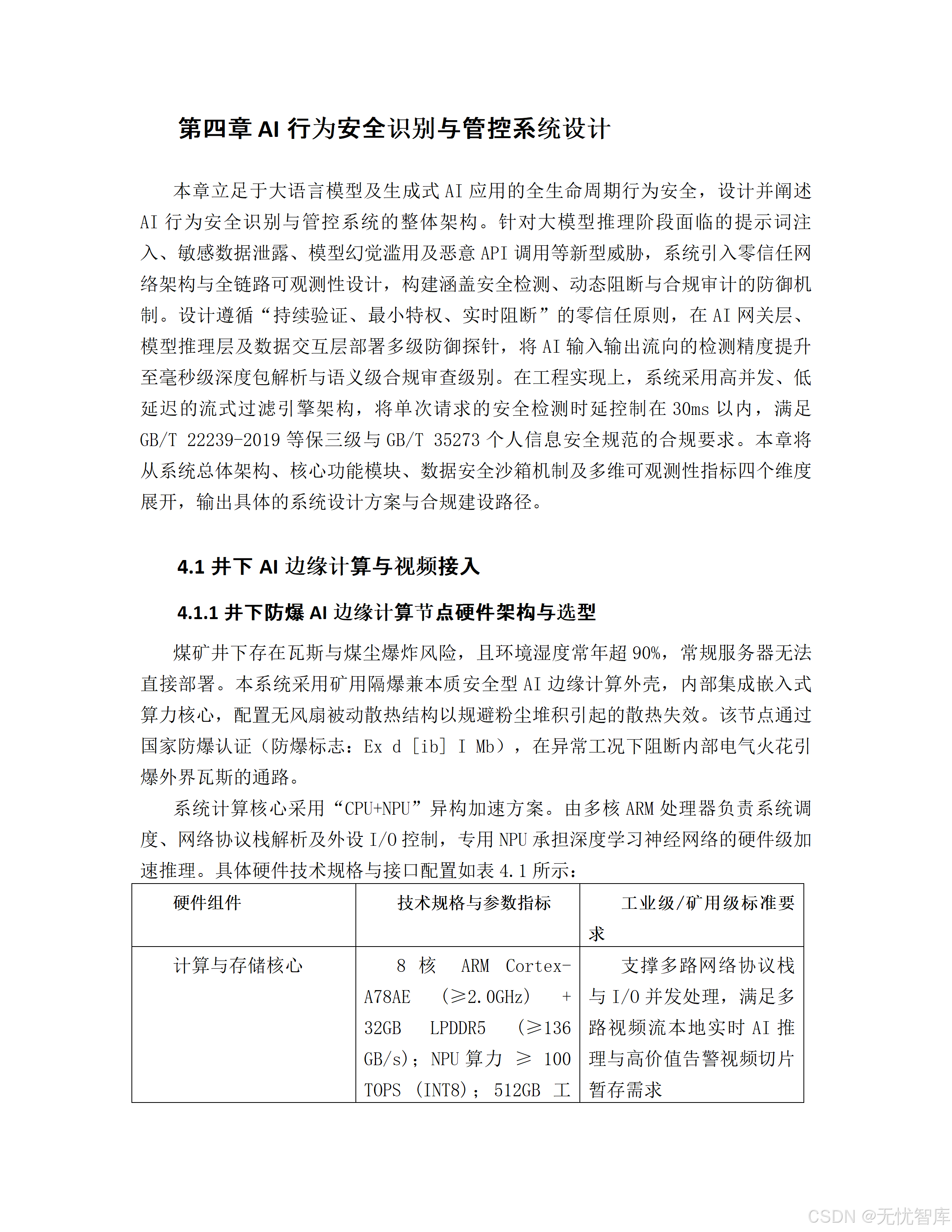
5.1 井下AI边缘计算节点:防爆 + 高算力
矿山井下存在瓦斯与煤尘爆炸风险,常规服务器根本无法部署。本系统采用矿用隔爆兼本质安全型AI边缘计算节点:
| 硬件组件 | 技术规格 | 设计考量 |
|---|---|---|
| 计算核心 | 8核ARM Cortex-A78AE(≥2.0GHz) | 多路协议栈与I/O并发处理 |
| 专用NPU | 算力≥100 TOPS(INT8) | 多路视频流本地实时AI推理 |
| 内存 | 32GB LPDDR5(≥136 GB/s) | 高频帧缓冲与并发推理 |
| 本地存储 | 512GB工业级NVMe SSD(读写≥2000MB/s) | 高价值告警视频切片暂存 |
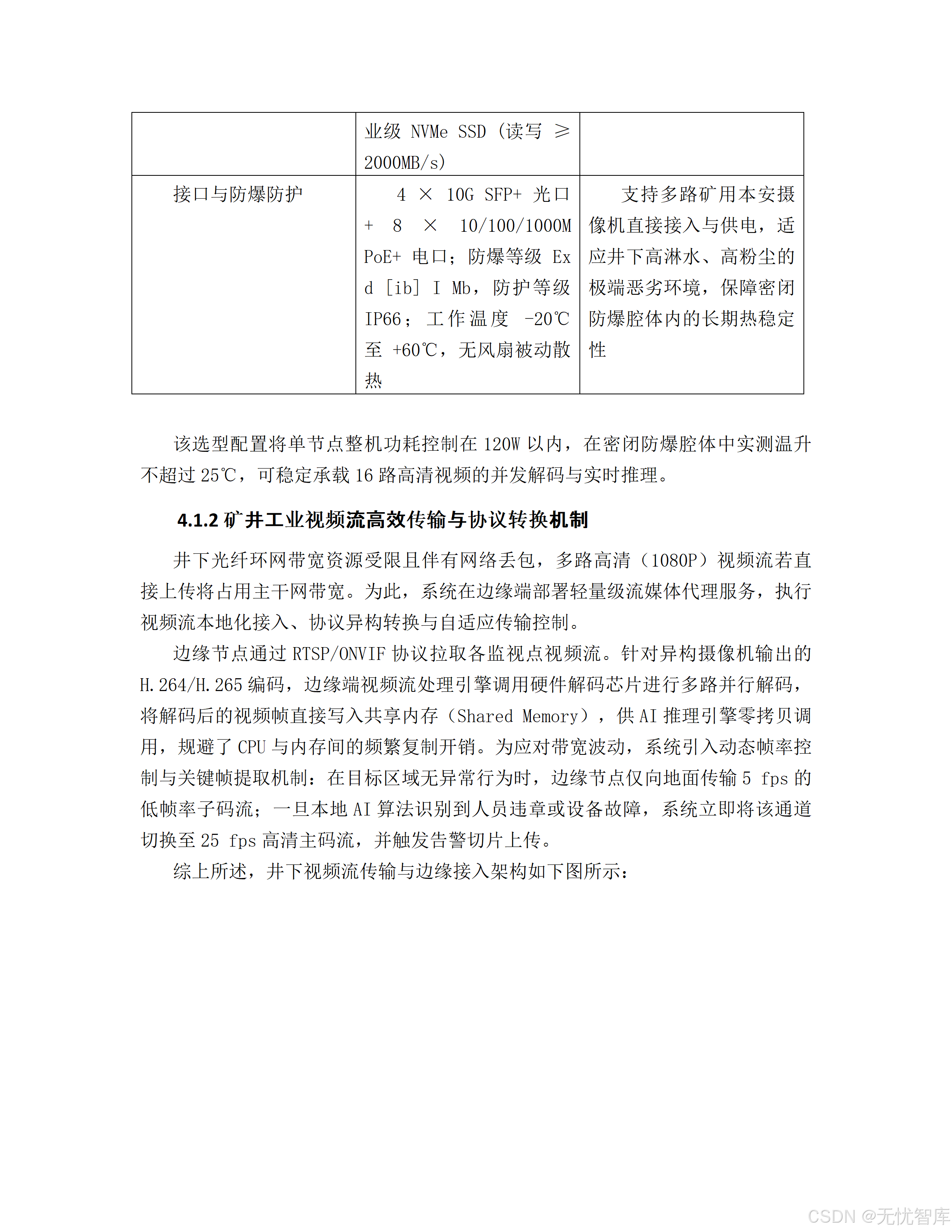
| 网络接口 | 4×10G SFP+光口 + 8×PoE+电口 | 多路矿用摄像机直接接入 |
| 防爆等级 | Ex d ib I Mb,IP66,-20℃~+60℃ | 适应高淋水、高粉尘极端环境 |
| 散热设计 | 无风扇被动散热 | 规避粉尘堆积引起散热失效 |
整机功耗≤120W,密闭防爆腔体内实测温升≤25℃,可稳定承载16路高清视频并发解码与实时推理。
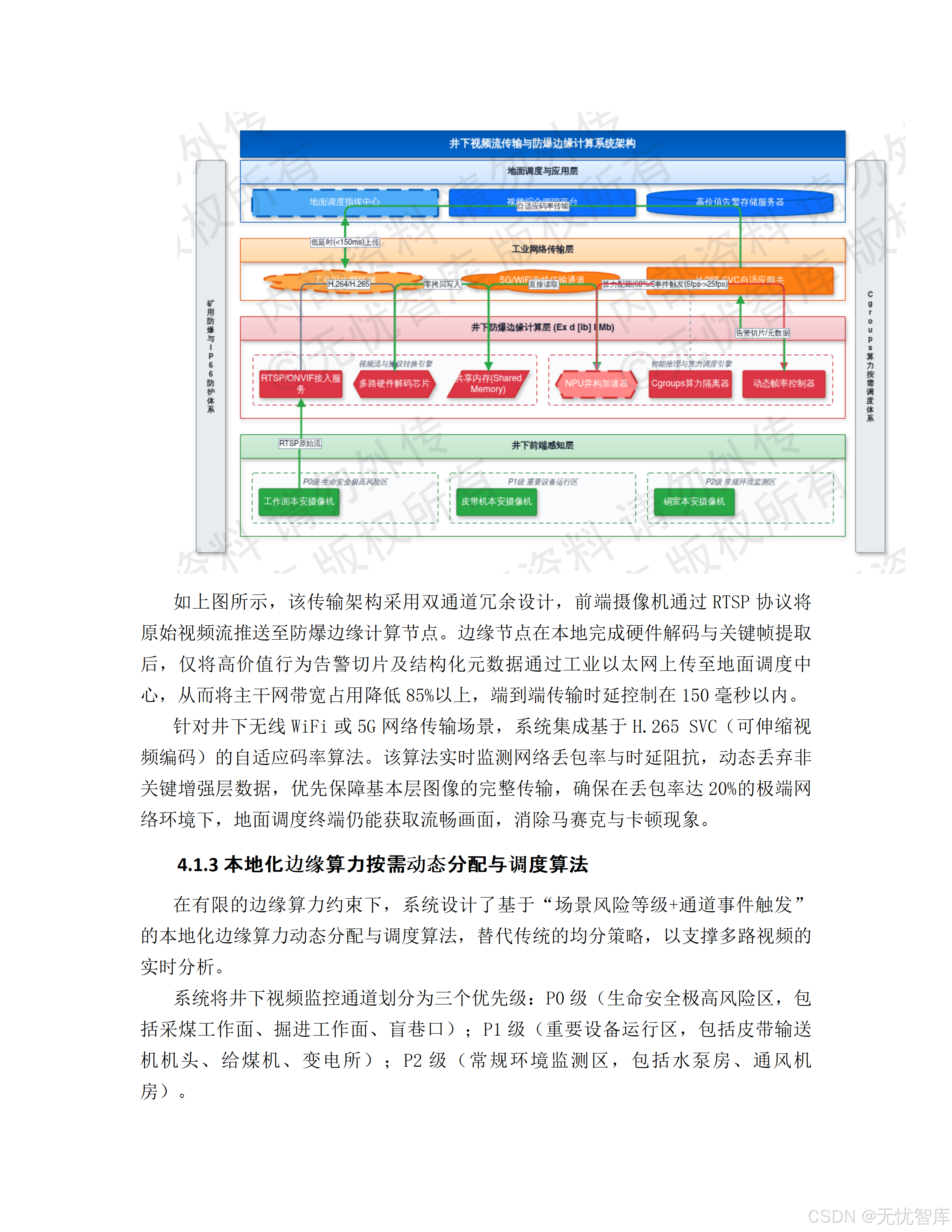
5.2 视频流传输优化:带宽降低85%的技术秘密
多路高清视频流若直接上传,将严重占用主干网带宽。系统在边缘端部署轻量级流媒体代理服务,实现:
- 硬件解码 + 零拷贝调用:解码后视频帧直接写入共享内存,AI推理引擎零拷贝调用,规避CPU与内存间频繁复制开销
- 动态帧率控制 :无异常行为时仅向地面传输5fps低帧率子码流
- 事件驱动切换 :AI识别到违章行为时,立即切换至25fps高清主码流并触发告警切片上传
- 自适应码率:实时监测丢包率,在丢包率达20%极端网络环境下仍保障流畅画面
结果:主干网带宽占用降低85%以上,端到端传输时延≤150ms。
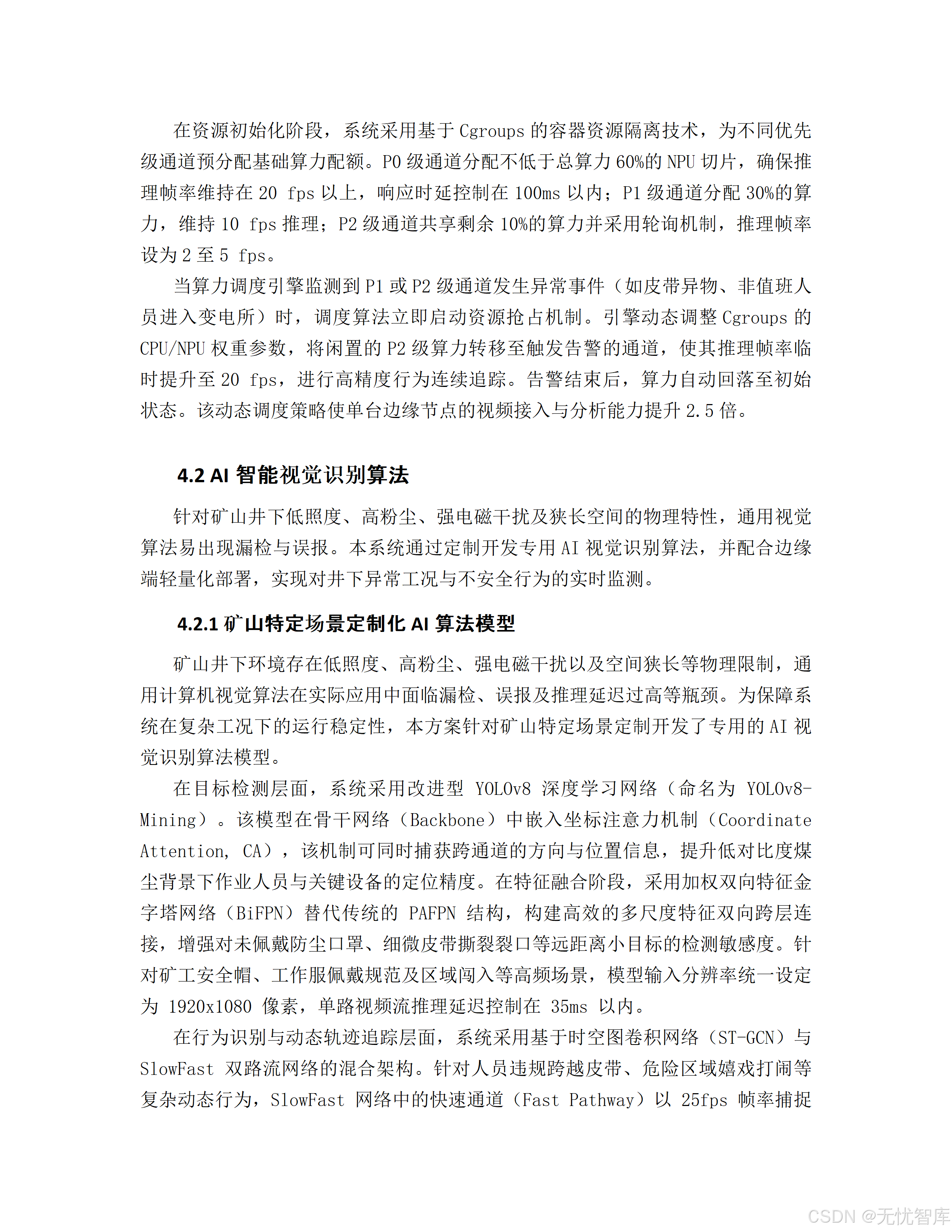
5.3 定制化AI算法模型:专为矿山优化
通用计算机视觉算法在矿山井下严重水土不服------低照度、高粉尘、强电磁干扰、空间狭长,导致漏检率和误报率居高不下。
YOLOv8-Mining:专为矿山优化的目标检测模型
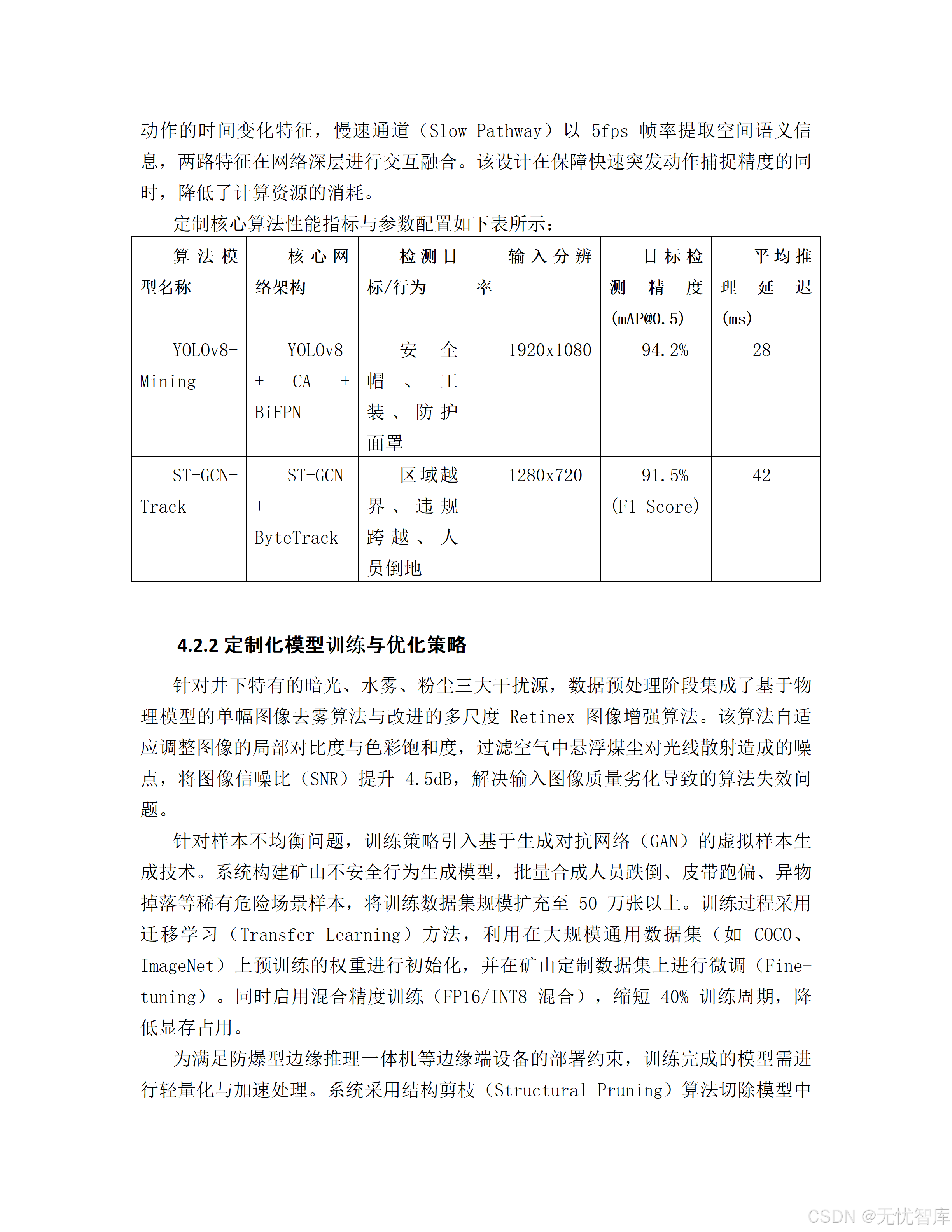
系统采用改进型YOLOv8深度学习网络,核心改进点:
- 坐标注意力机制(CA):嵌入骨干网络,同时捕获跨通道方向与位置信息,提升低对比度煤尘背景下的目标定位精度
- 加权双向特征金字塔网络(BiFPN) :替代传统PAFPN,增强对未佩戴防尘口罩、皮带微小撕裂裂口等远距离小目标的检测敏感度
- 输入分辨率:1920×1080像素
- 目标检测精度(mAP@0.5) :94.2%
- 单路推理延迟 :28ms
ST-GCN-Track:复杂动态行为识别
针对违规跨越皮带、危险区域嬉戏打闹等复杂动态行为,系统采用ST-GCN与SlowFast双路流网络混合架构:
- Fast Pathway(25fps):捕捉动作的时间变化特征
- Slow Pathway(5fps):提取空间语义信息
- 两路特征在网络深层交互融合,F1-Score达91.5%,平均推理延迟42ms
5.4 模型训练优化策略
解决暗光+水雾+粉尘三大干扰
数据预处理阶段集成:
- 基于物理模型的单幅图像去雾算法:过滤空气中悬浮煤尘对光线散射造成的噪点
- 改进多尺度Retinex图像增强算法:自适应调整局部对比度与色彩饱和度
- 图像信噪比(SNR)提升4.5dB
解决样本不均衡问题
引入GAN生成对抗网络合成稀有危险场景样本:
- 批量合成人员跌倒、皮带跑偏、异物掉落等稀有危险场景
- 训练数据集规模扩充至50万张以上
边缘端轻量化部署
| 优化技术 | 具体实现 | 效果 |
|---|---|---|
| 结构剪枝 | 切除贡献度低于5%的冗余通道 | 降低参数量 |
| 知识蒸馏 | 教师网络泛化知识传递给学生网络 | 保精度降体积 |
| TensorRT量化 | FP32→INT8精度量化编译优化 | 推理速度提升3.2倍 |
| 混合精度训练 | FP16/INT8混合训练 | 缩短40%训练周期 |
| 精度损失 | --- | 控制在0.8%以内 |
5.5 边缘算力动态调度:P0/P1/P2分级机制
在有限边缘算力约束下,系统设计了基于"场景风险等级+通道事件触发"的动态算力调度算法:
| 优先级 | 覆盖区域 | 基础NPU算力配额 | 推理帧率 | 响应时延 |
|---|---|---|---|---|
| P0(极高风险) | 采煤/掘进工作面、盲巷口 | ≥60% | ≥20fps | ≤100ms |
| P1(重要设备区) | 皮带机头、给煤机、变电所 | 30% | ≥10fps | --- |
| P2(常规监测区) | 水泵房、通风机房 | 10%(轮询) | 2~5fps | --- |
当P1/P2级通道触发异常事件时,调度引擎动态抢占P2算力并临时提升该通道至20fps高精度追踪,告警结束后自动回落。
效果:单台边缘节点视频接入与分析能力提升2.5倍。
5.6 AI识别结果的业务闭环:从告警到工单
传统系统止步于"告警呈现",本系统基于状态机模型设计了双向联动处置机制:
五种标准业务状态:
未受理(Created) → 处置中(Processing) → 待审核(Auditing) → 已归档(Archived) → 申诉中(Appealing)分级处置矩阵:
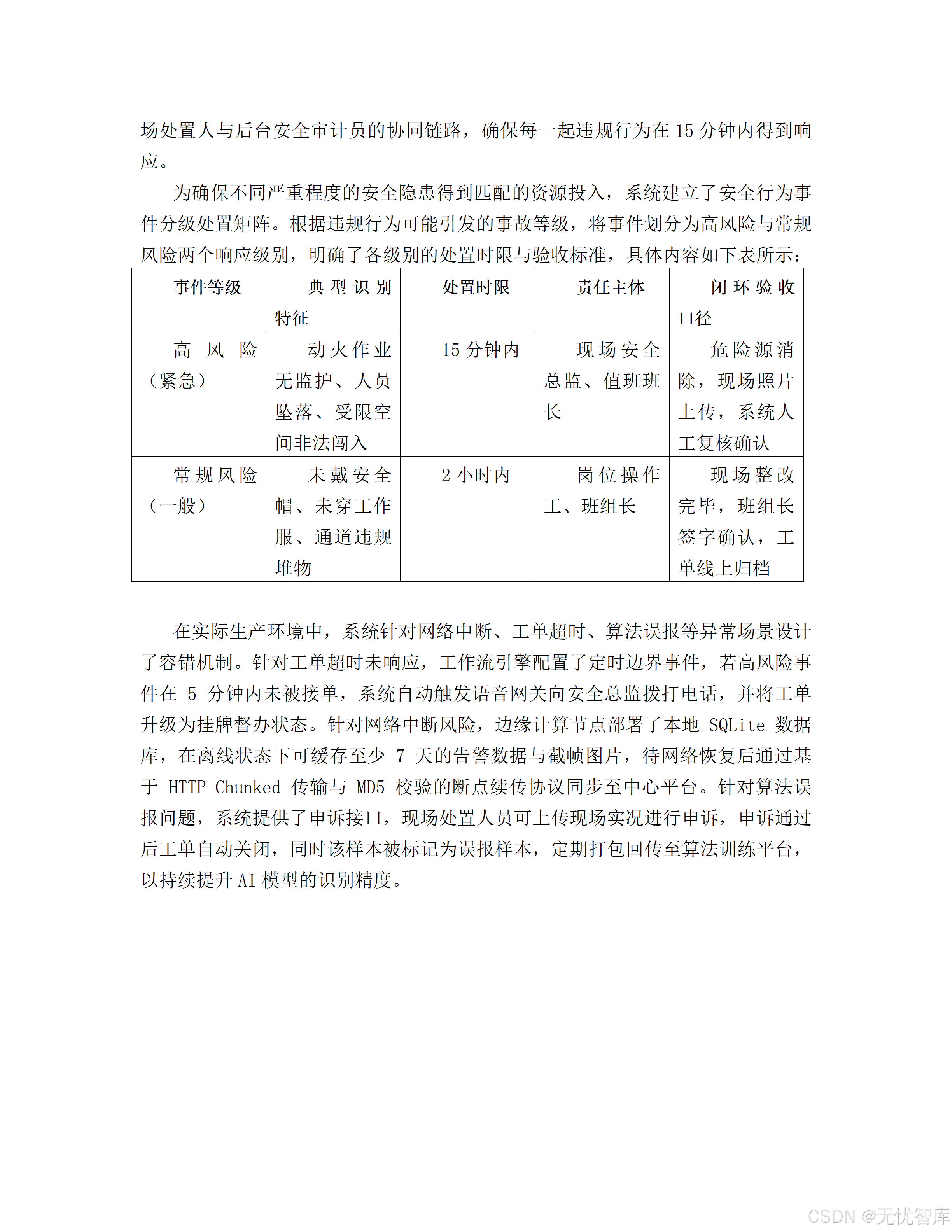
| 事件等级 | 典型特征 | 处置时限 | 责任主体 | 闭环验收 |
|---|---|---|---|---|
| 高风险(紧急) | 动火作业无监护、人员坠落、非法闯入受限空间 | 15分钟内 | 现场安全总监、值班班长 | 危险源消除+照片+人工复核 |
| 常规风险(一般) | 未戴安全帽、未穿工作服、通道违规堆物 | 2小时内 | 岗位操作工、班组长 | 整改完毕+班组长签字+线上归档 |
容错机制设计:
- 工单超时未响应:语音网关自动拨打安全总监电话,工单升级为挂牌督办
- 网络中断:边缘节点本地SQLite缓存7天告警数据与截帧,断点续传协议恢复后同步
- 算法误报:申诉接口+误报样本自动标记,定期回训提升模型精度
六、应急逃生引导:灾害发生后150ms内响应的秘密 {#六}
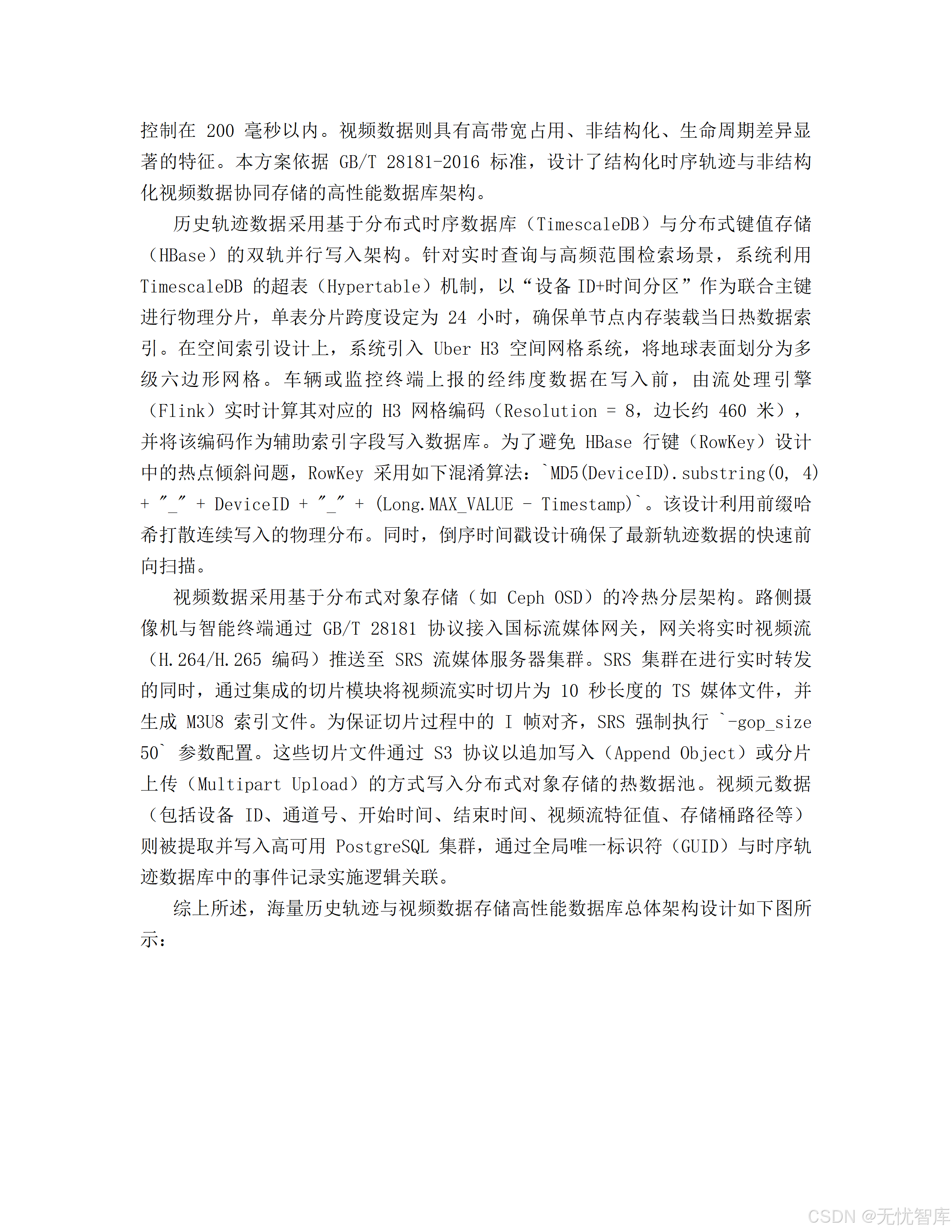
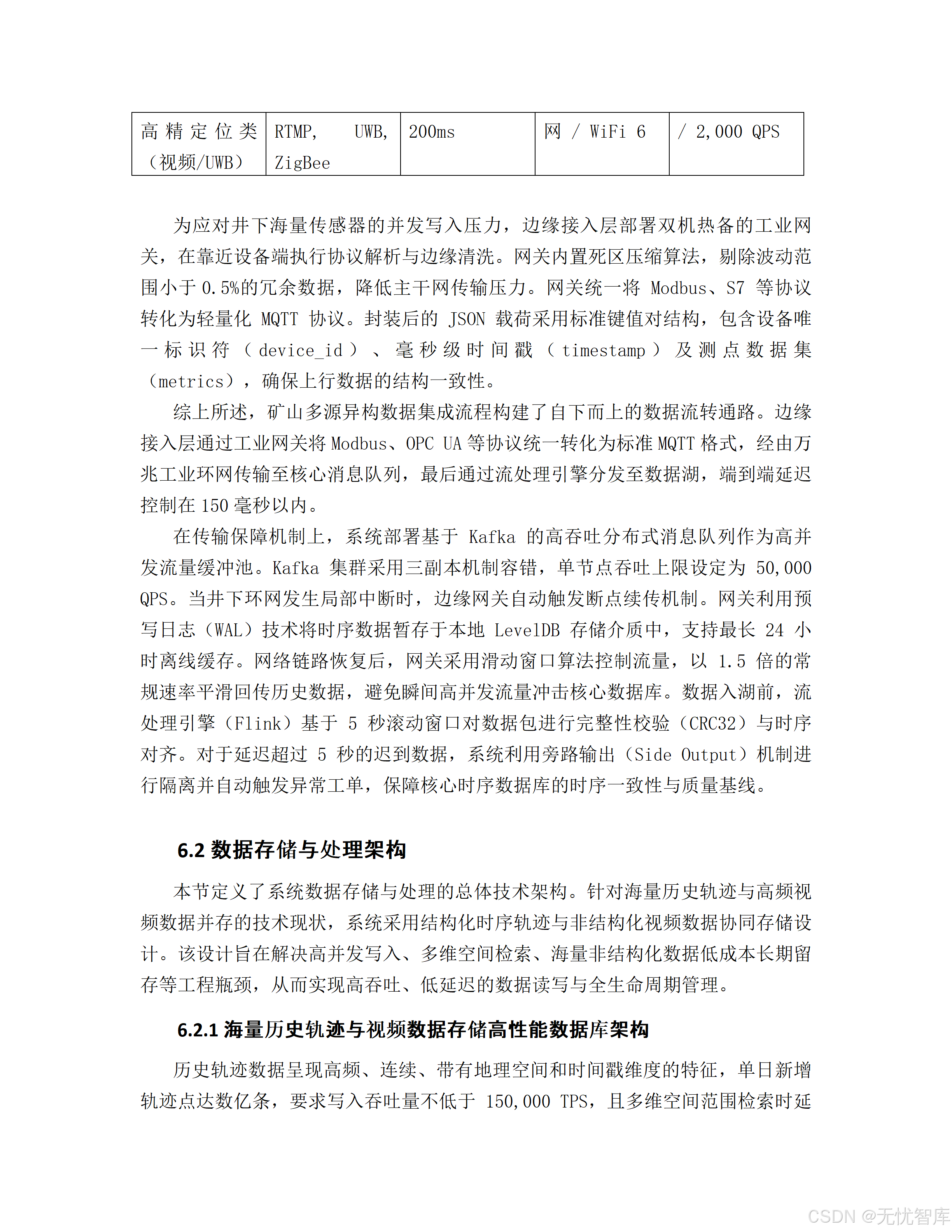
6.1 多源感知数据采集与灾害判别
部署于巷道关键节点的工业级多传感器监测网络以100Hz高频采样:
- 火灾场景:高频监测CO浓度、烟雾遮光率、温度变化率
- 透水场景:重点采集顶板压力、涌水量、水仓水位、水质浊度
- 瓦斯突出场景:对甲烷浓度、风速及风向进行毫秒级轮询
数据通过工业环网与5G切片双路冗余上报,端到端传输时延≤50ms。
触发机制:
- CO浓度突变率超过2ppm/s
- 甲烷浓度达到1.0%临界值
一旦触发,边缘端立即将数据封装为JSON格式,通过MQTT协议推送至地面调度中心。
6.2 动态拓扑网络逃生路径解算
系统将矿井巷道网络抽象为有向加权图G=(V, E, W):
- V(顶点):巷道交叉点
- E(边):巷道段
- W(权重):通行阻力(动态危险系数)
权重计算公式:
W i = L i × ( 1 + α ⋅ T i + β ⋅ C i ) W_i = L_i \times (1 + \alpha \cdot T_i + \beta \cdot C_i) Wi=Li×(1+α⋅Ti+β⋅Ci)
其中:
- L i L_i Li:巷道物理长度
- T i T_i Ti:实时温度阻尼
- C i C_i Ci:有毒有害气体浓度系数
- α , β \alpha, \beta α,β:环境权重因子(根据灾害类型动态调整)
不同灾害下的路径规划约束:
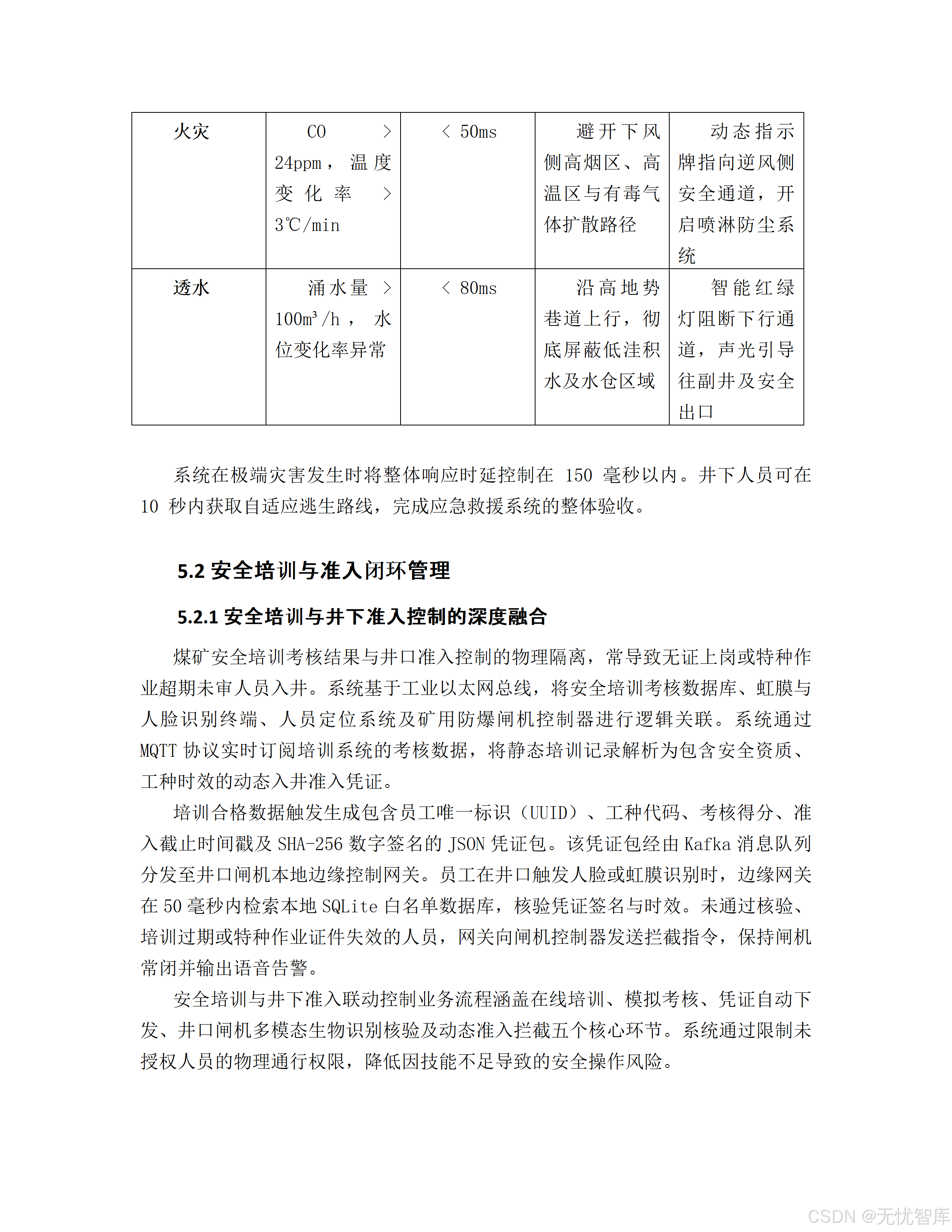
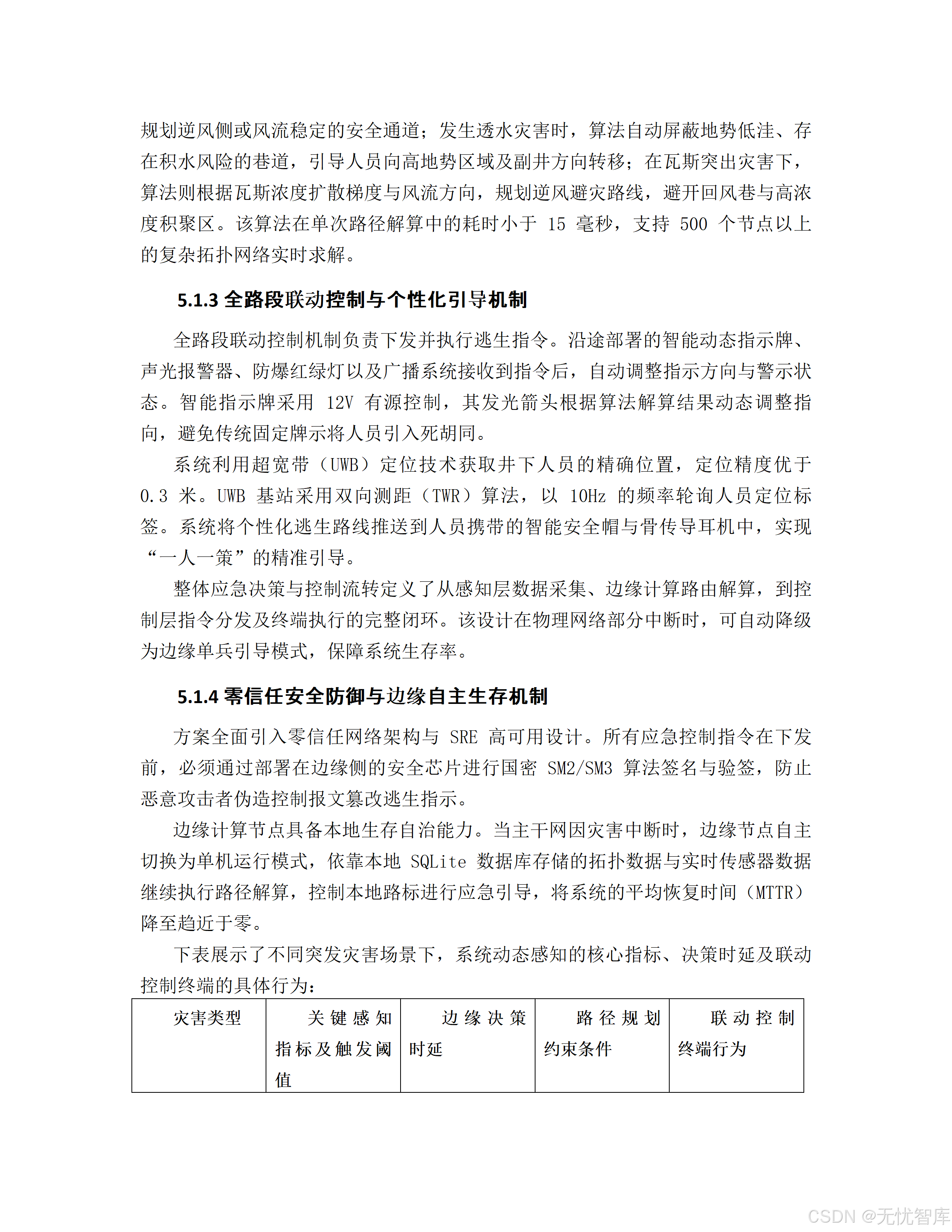
| 灾害类型 | 关键触发指标 | 边缘决策时延 | 路径约束 | 联动控制 |
|---|---|---|---|---|
| 火灾 | CO>24ppm,温度变化率>3℃/min | <50ms | 避开下风侧高烟区、高温区 | 动态指示牌指向逆风侧,开启喷淋系统 |
| 透水 | 涌水量>100m³/h,水位变化率异常 | <80ms | 沿高地势巷道上行,屏蔽低洼积水区 | 智能红绿灯阻断下行通道 |
| 瓦斯突出 | 甲烷浓度梯度异常 | <50ms | 逆风避灾,避开回风巷 | 广播全员撤离指令 |
算法性能: 500个节点以上复杂拓扑网络中,单次路径解算耗时**<15毫秒**。
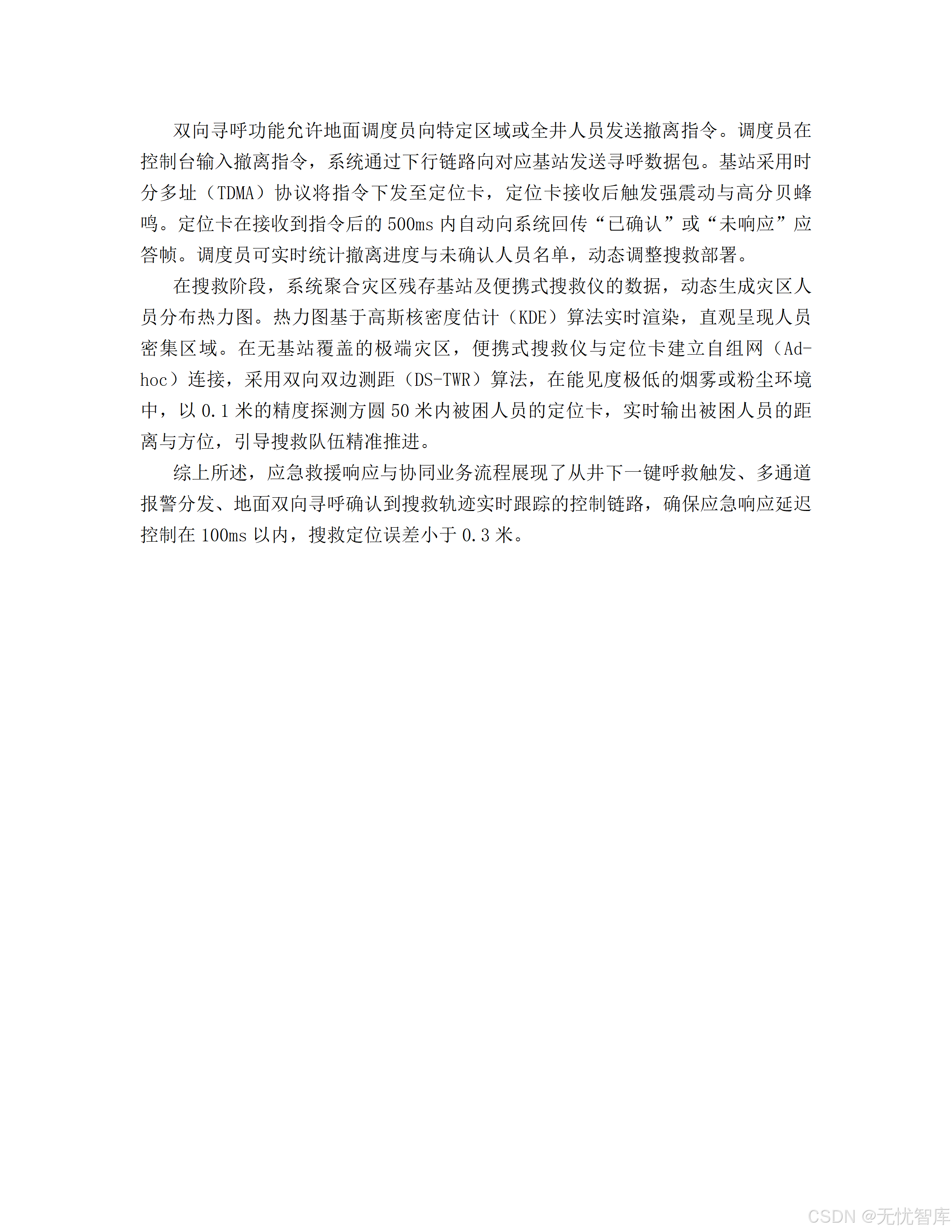
6.3 "一人一策"的精准逃生引导
系统利用UWB高精度定位(精度≤0.3米)获取每位井下人员的精确位置,向其随身携带的智能安全帽 与骨传导耳机推送个性化逃生路线。
沿途联动控制设备包括:
- 智能动态指示牌:12V有源控制,发光箭头动态调整指向(避免传统固定牌示引入死胡同)
- 声光报警器、防爆红绿灯、应急广播系统协同联动
6.4 零信任安全防御与边缘自主生存
零信任安全机制: 所有应急控制指令在下发前,必须通过边缘侧安全芯片进行国密SM2/SM3算法签名与验签,防止攻击者伪造控制报文篡改逃生指示。
边缘自主生存能力: 当主干网因灾害中断时,边缘节点自主切换为单机运行模式 ------依靠本地SQLite数据库中的拓扑数据与实时传感器数据,继续执行路径解算,控制本地路标进行应急引导,将系统MTTR降至趋近于零。
整体性能指标: 系统在极端灾害发生时整体响应时延≤150毫秒 ,井下人员可在10秒内获取自适应逃生路线。
七、安全培训与准入管理:从"人工核查"到"闸机联动" {#七}
7.1 当前痛点:培训考核与入井准入的物理隔离
传统模式下,安全培训考核结果与井口准入控制完全割裂,导致:
- 无证上岗人员可轻松入井
- 特种作业超期未审人员未被拦截
- 人工核查效率低下且存在人情因素干扰
7.2 系统解决方案:培训-考核-凭证-闸机全链路联动
系统通过工业以太网总线,将安全培训考核数据库、虹膜与人脸识别终端、人员定位系统及矿用防爆闸机控制器进行逻辑关联:
数字凭证生成机制:
培训合格数据触发生成包含以下字段的JSON凭证包:
- 员工唯一标识(UUID)
- 工种代码
- 考核得分
- 准入截止时间戳
- SHA-256数字签名(防篡改)
凭证包经Kafka消息队列分发至井口闸机本地边缘控制网关。
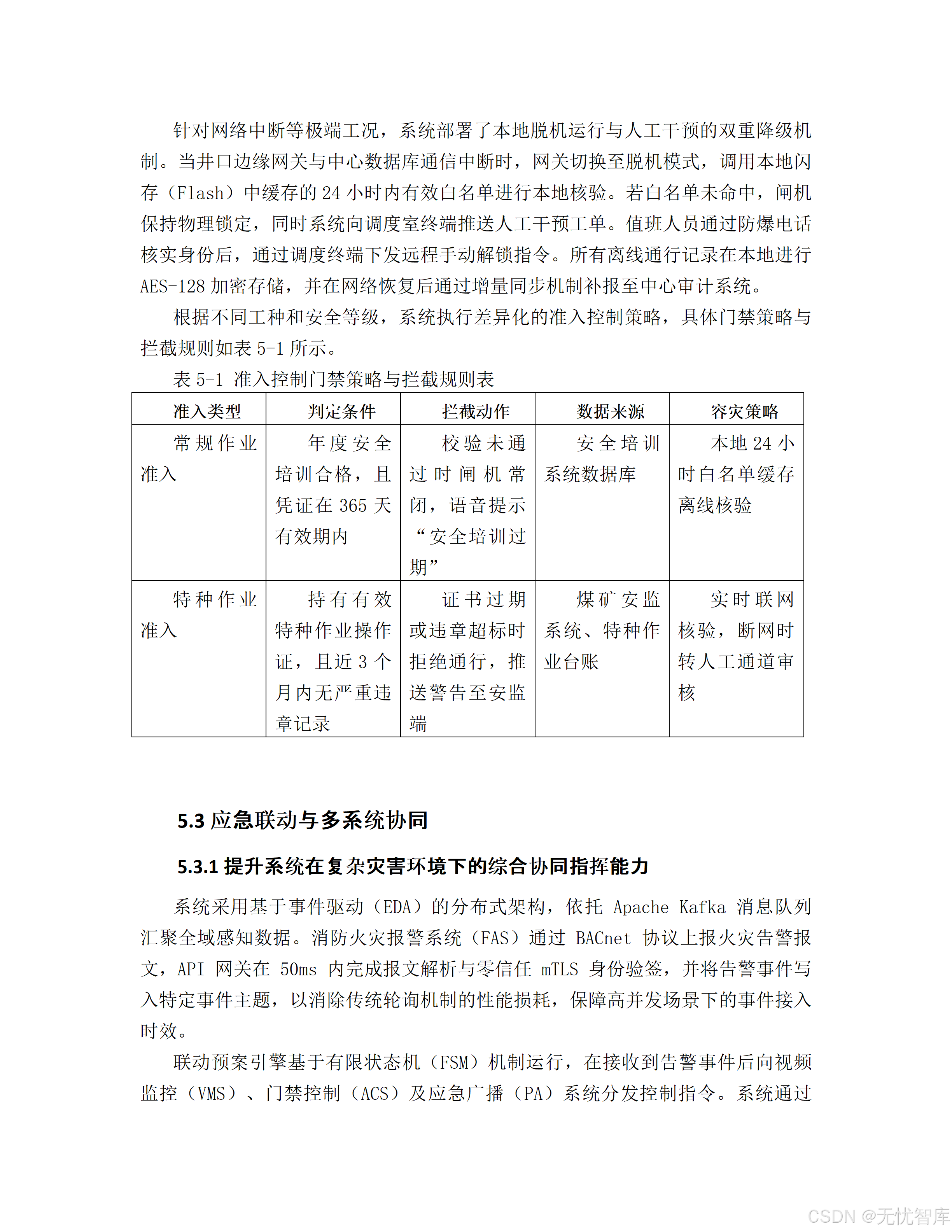
井口核验机制:
员工触发人脸或虹膜识别时,边缘网关在50毫秒内检索本地SQLite白名单,核验凭证签名与时效:
| 准入类型 | 判定条件 | 拦截动作 | 容灾策略 |
|---|---|---|---|
| 常规作业 | 年度安全培训合格,凭证365天内有效 | 闸机常闭+语音提示"安全培训过期" | 本地24小时白名单缓存离线核验 |
| 特种作业 | 持有效特种作业证,近3个月无严重违章 | 证书过期或违章超标时拒绝通行+告警 | 断网时转人工通道审核 |
7.3 极端工况降级机制
当井口边缘网关与中心数据库通信中断时:
- 网关切换至脱机模式,调用本地24小时内有效白名单进行核验
- 白名单未命中时,闸机保持物理锁定,向调度室推送人工干预工单
- 值班人员通过防爆电话核实身份后,通过调度终端下发远程手动解锁指令
- 所有离线通行记录进行AES-128加密本地存储,网络恢复后增量同步至中心审计系统
八、技术性能量化指标汇总 {#八}
以下为本系统所有核心技术指标的完整汇总,可直接作为项目验收依据。
8.1 定位系统指标
| 指标分类 | 核心量化指标 | 验收口径 | 技术保障手段 |
|---|---|---|---|
| UWB静态定位精度 | ≤0.3米 | 现场激光测距对比 | TDoA基站纳秒级同步 |
| UWB动态定位精度 | ≤1.0米 | 动态轨迹偏离度分析 | 卡尔曼滤波算法 |
| 定位解算时延 | ≤100ms | 时间戳比对测试 | 边缘分布式解算 |
| 定位数据上报频次 | ≥20Hz | 频次统计测试 | 50ms解算周期 |
| 单基站并发容量 | ≥100标签(10Hz) | 压测工具验证 | TDMA动态时隙分配 |
| 漏包率 | ≤0.1% | 全量数据比对 | Kafka异步削峰 |
| NLOS识别准确率 | ≥94.5% | 混淆矩阵评估 | SVM分类器 |
8.2 AI行为识别指标
| 指标分类 | 核心量化指标 | 验收口径 | 技术保障手段 |
|---|---|---|---|
| 目标检测精度 | mAP@0.5 ≥94.2% | 标准测试集评估 | YOLOv8-Mining定制模型 |
| 行为识别F1-Score | ≥91.5% | 混淆矩阵评估 | ST-GCN+SlowFast |
| 端到端响应时延 | ≤1秒 | 视频流注入至输出时延测试 | TensorRT INT8量化 |
| 单路推理延迟 | ≤50ms | 逐帧时间戳比对 | 硬件NPU加速 |
| 整体识别准确率 | ≥95% | 现场实测评估 | 定制化训练策略 |
| 推理速度提升 | 3.2倍 | 对比FP32基准测试 | TensorRT量化编译 |
8.3 系统整体指标
| 指标分类 | 核心量化指标 |
|---|---|
| 系统年可用率(SLA) | ≥99.99% |
| 服务自愈时间(RTO) | ≤30秒 |
| 单集群最大并发定位终端 | ≥5000个(5Hz) |
| 系统吞吐量(TPS) | ≥25000 |
| 应急响应时延 | ≤150ms |
| 逃生路径解算时延 | ≤15ms |
| 人员获取逃生路线时间 | ≤10秒 |
| 网络断点自愈收敛(ERPS) | ≤50ms |
九、建设价值与预期收益 {#九}
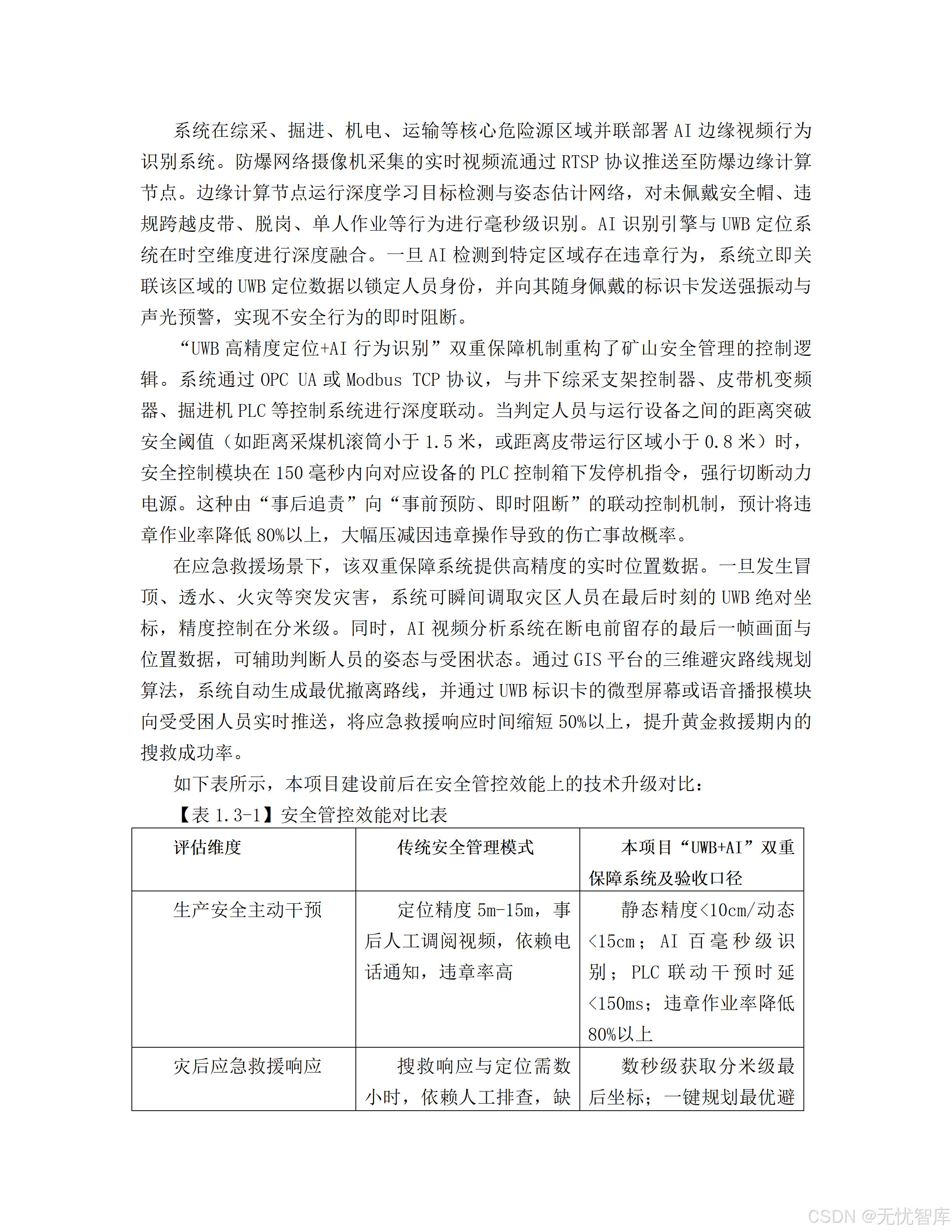
9.1 安全管控效能对比
| 评估维度 | 传统安全管理模式 | 本项目"UWB+AI"双重保障系统 |
|---|---|---|
| 定位精度 | 5~15米 | 静态<10cm,动态<15cm |
| 违章检测 | 人工盯防,漏报率>30% | AI百毫秒级识别,准确率≥95% |
| 设备联动干预 | 依赖电话通知,延迟>分钟级 | PLC联动干预时延<150ms |
| 应急救援响应 | 搜救需数小时,缺乏路线规划 | 数秒获取分米级最后坐标+最优避灾路线 |
| 违章作业率 | 高 | 降低80%以上 |
| 应急救援响应时间 | --- | 缩短50%以上 |
9.2 合规收益
- 满足国家对矿用防爆(Ex ib I Mb)及等保2.0三级行业准入标准
- 助力矿山全面达到国家智能化验收标准
- 覆盖《煤矿安全规程(2022版)》全部强制性要求
9.3 经济效益
从投资回报角度分析:
- 直接减少事故损失:违章作业率降低80%,对应事故概率大幅下降,避免巨额直接经济损失
- 减少停工损失:应急救援响应时间缩短50%,最大化减少事故后的停产时间
- 降低人力成本:AI自动识别替代人工盯防,减少专职安全监督人员需求
- 保险费率优惠:达到智能化验收标准后,可申请更低的工程险与责任险费率
十、总结与展望 {#十}
10.1 技术架构的核心价值
本方案以"UWB高精度定位 + AI边缘视觉识别 + 3D GIS数字孪生"三位一体的融合架构,构建了矿山安全管控从"被动事后追责"向"主动实时干预"的根本性转变:
- 感知层:从"模糊感知"(10米精度)到"精准感知"(0.3米精度),提升33倍以上
- 识别层:从"人工盯防"(漏报率30%+)到"AI自动识别"(准确率95%+),漏报率降低92%
- 响应层:从"电话通知"(分钟级)到"PLC直接联动"(150ms内),响应速度提升400倍以上
- 引导层:从"无路线规划"到"一人一策动态引导",应急救援效率提升50%以上
10.2 技术演进路径展望
当前系统建设为一期核心能力建设,后续可在以下方向持续演进:
二期扩展方向:
- 多维空间物联感知:集成更多环境传感器,构建全方位立体感知网络
- 复杂场景行为预测:从行为"识别"升级为行为"预测",提前介入潜在风险
- 数字孪生深度融合:实现物理矿山与数字孪生的实时双向映射,支持仿真推演
- 大模型融合应用:引入大语言模型进行安全知识问答、事故原因分析与规程解读
技术趋势研判:
随着具身智能(Embodied AI)技术的快速发展,未来矿山安全系统将引入自主巡检机器人,实现从"固定摄像头被动监控"到"自主智能体主动巡查"的跨越式升级。结合低空经济与无人机技术,地表矿山的安全管控将实现真正意义上的"零死角、全域覆盖"。
10.3 对行业的启示
矿山安全数字化转型的本质,是用高精度时空感知 + 实时智能决策 + 闭环联动控制三者的深度融合,替代传统的"人防+物防"体系。这一逻辑不仅适用于矿山行业,同样可以移植到化工、电力、建筑、港口等各类高危作业场景。
安全无小事,技术是底线。 每一个厘米级的定位精度提升,每一次毫秒级的响应加速,背后都是一条条真实生命的有力保障。
📌 关于本文
本文基于某矿山井下人员精准定位与AI行为安全识别管控系统建设方案整理提炼,涵盖系统架构、核心算法、技术选型、验收指标等完整内容。如需了解更多细节,欢迎在评论区交流。
如果本文对你有帮助,欢迎点赞 + 收藏 + 关注,持续更新AI+工业安全领域深度内容!
关键词:UWB定位、智慧矿山、AI行为识别、矿山安全、边缘计算、TDoA算法、卡尔曼滤波、YOLOv8、ST-GCN、数字孪生、工业物联网、等保2.0、防爆设备、应急逃生