一、实验目的
- 理解ROS参数服务器(Parameter Server)的作用及工作机制。
- 掌握rosparam命令的基本操作方法。
- 学会使用YAML文件管理系统配置参数。
- 掌握Launch文件的编写与使用方法。
- 能够通过Launch文件实现ROS系统的一键启动。
二、实验环境
- 操作系统:Ubuntu 20.04
- ROS版本:ROS Noetic
- 编程语言:Python 3
- 工具:终端(Terminal)
- 功能包:turtlesim
三、实验原理
- 参数服务器用于存储系统运行参数,节点可以动态读取和修改这些参数,实现配置与运行的分离。
- YAML文件用于集中管理系统配置参数,便于复用和版本控制。
- Launch文件允许同时启动多个ROS节点、加载参数文件和设置运行环境,实现系统一键化启动,提高实验和开发效率。
四、实验内容
实验(一):参数服务器基本操作
第七天------任务1:参数服务器基本操作
ROS参数操作命令表格
| 命令 | 功能描述 | 使用示例 |
|---|---|---|
rosparam set |
设置参数值 | rosparam set /param_name value |
rosparam get |
获取参数值 | rosparam get /param_name |
rosparam load |
从YAML文件加载参数到ROS参数服务器 | rosparam load params.yaml |
rosparam dump |
将当前参数服务器的参数导出到YAML文件 | rosparam dump params.yaml |
rosparam delete |
删除指定参数 | rosparam delete /param_name |
rosparam list |
列出所有参数名 | rosparam list |
先打开roscore
bash
rosparam set name huluwa
rosparam get name
rosparam delete name
#将参数写出到外部文件
rosparam dump yyy.yaml
rosparam load(先准备 yaml 文件)
#从外部文件加载参数
rosparam load xxx.yaml实验(二):使用 YAML 文件管理 ROS 参数
第七天------任务2:使用YAML文件管理ROS参数
一、实验目的
- 理解YAML文件的作用和应用场景。
- 掌握YAML文件的基本语法规则。
- 学会使用YAML文件批量配置ROS参数。
- 掌握通过rosparam load命令加载参数的方法。
- 能够通过参数服务器读取并验证配置结果。
- 理解配置文件与程序代码分离的开发思想。
二、实验背景在实际机器人项目开发中,系统通常包含大量配置参数,例如:
- 机器人名称
- 最大运行速度
- 激光雷达安装位置
- 摄像头分辨率
- PID控制器参数
- 地图文件路径
如果这些参数直接写在程序代码中:
robot_name = "Robot01"
max_speed = 1.5
camera_width = 640
camera_height = 480
当参数发生变化时,需要修改代码并重新运行程序。
为了提高系统的可维护性,ROS提供了参数服务器(Parameter Server),而YAML文件则用于统一管理这些参数。
开发人员只需要修改配置文件,无需修改程序代码。
因此:
YAML = 参数配置文件
Parameter Server = 参数存储中心
三、认识 YAML 文件1. YAML 是什么
YAML(YAML Ain't Markup Language)是一种专门用于数据配置的文本格式。
特点:
- 可读性强
- 结构清晰
- 编写简单
- 支持层级关系
- 广泛应用于ROS系统
文件扩展名:
.yaml
或者
.yml
2. YAML 基本语法
( 1 )键值对
格式:
name: ZhangSan
age: 20
score: 95
含义:
|-------|----------|
| 参数名 | 参数值 |
| name | ZhangSan |
| age | 20 |
| score | 95 |( 2 )层级结构
格式:
student:
name: ZhangSan
age: 20
score: 95
注意:
子级内容必须缩进。
推荐使用:
2个空格
或
4个空格
不要使用Tab键。
对应关系:
student
├─ name
├─ age
└─ score
( 3 )列表数据
格式:
courses:
ROS
Linux
Python
等价于:
courses0 = ROS
courses1 = Linux
courses2 = Python
( 4 )布尔值
enable_camera: true
enable_lidar: false
( 5 )浮点数
max_speed: 1.5
wheel_radius: 0.08
四、创建 YAML 配置文件
步骤 1 :创建配置目录
bash#进入工作空间: cd ~/catkin_ws/src/my_pkg #创建配置目录: mkdir config #查看目录: my_pkg ├── launch ├── scripts ├── src └── config步骤 2 :创建 student.yaml 文件
bash#进入配置目录: cd config #创建文件: gedit student.yaml #输入以下内容: student: name: ZhangSan age: 20 score: 95 #保存退出。步骤 3 :检查 YAML格式
bash#正确格式: student: name: ZhangSan age: 20 score: 95 #错误格式: student: name: ZhangSan age: 20 score: 95 #原因:没有缩进。 #错误格式: student: name: ZhangSan #原因:使用了Tab键。YAML要求使用空格缩进。
五、加载 YAML 参数到参数服务器
步骤 1 :启动 ROS Master
bash打开终端: roscore 启动成功后保持窗口运行。步骤 2 :加载配置文件
bash新开终端: rosparam load student.yaml 执行成功后不会显示明显提示。步骤 3 :查看全部参数
bashrosparam list 输出示例: /student/age /student/name /student/score 说明参数已经进入参数服务器。
六、读取参数
bash读取姓名 rosparam get /student/name 结果: ZhangSan 读取年龄 rosparam get /student/age 结果: 20 读取成绩 rosparam get /student/score 结果: 95 查看整个节点参数 rosparam get /student 结果: age: 20 name: ZhangSan score: 95
七、修改配置文件并重新加载
修改文件:
student:
name: LiSi
age: 22
score: 88
重新加载:
rosparam load student.yaml
查询:
rosparam get /student/name
结果:
LiSi
说明参数已更新。
八、机器人配置实例实际机器人项目中的配置文件通常如下:
robot:
name: smart_robot
max_speed: 1.5
wheel_radius: 0.08
camera:
width: 640
height: 480
fps: 30
lidar:
range: 10
frequency: 15
加载后:
rosparam list
可看到:
/robot/name
/robot/max_speed
/robot/wheel_radius
/camera/width
/camera/height
/camera/fps
/lidar/range
/lidar/frequency
这就是大型ROS项目中常见的配置管理方式。
实验(三) :使用 Launch 文件启动 ROS 系统
第七天------任务3:使用 Launch 文件启动 ROS 系统
一、实验目的
- 理解 Launch 文件的作用和优势。
- 掌握 Launch 文件的基本语法和结构。
- 学会通过 Launch 文件启动单个节点和多个节点。
- 掌握在 Launch 文件中加载参数文件(YAML)。
- 理解节点命名、重映射话题、传递参数的方法。
- 能够使用 Launch 文件实现系统一键启动,提高开发效率。
二、实验背景在 ROS 系统开发中,如果每次都用 rosrun 单独启动节点,会有以下问题:
- 多个节点需要多个终端窗口。
- 参数加载和节点启动需要多条命令。
- 系统启动容易出错,调试困难。
Launch 文件的优势:
- 可以一次性启动多个节点。
- 可以加载 YAML 参数文件。
- 可以设置节点命名和话题重映射。
总结:Launch 文件 = ROS 系统启动脚本 + 参数加载器
三、认识 Launch 文件1. 文件格式
- 扩展名:.launch
- 文件类型:XML
2. 基本结构
bash<launch> <node pkg="package_name" type="node_executable" name="node_name"/> </launch>说明:
|------------|--------|--------------|
| 标签 | 属性 | 说明 |
| <launch> | 无 | 根标签,包含所有启动内容 |
| <node> | pkg | 节点所在包名 |
| | type | 节点可执行文件名 |
| | name | 启动节点时使用的名称 |
| | output | 日志输出方式(可选) |
四、实验内容
实验 4.1 :启动单个节点
1.创建 launch 文件 launch/start_turtle.launch
bash<launch> <node pkg="turtlesim" type="turtlesim_node" name="turtle1" output="screen"/> </launch> 说明: pkg="turtlesim" 指定功能包。 type="turtlesim_node" 指定节点执行文件。 name="turtle1" 为节点自定义名称。 output="screen" 输出日志到终端。2.运行:
bashroslaunch my_pkg start_turtle.launch 注意:这里用的命令是roslaunch3.观察
- 弹出 turtlesim 窗口
- 终端显示节点启动日志
实验 4.2 :启动多个节点
1.创建 launch 文件 launch/multi_turtle.launch
bash<launch> <node pkg="turtlesim" type="turtlesim_node" name="turtle1" output="screen"/> <node pkg="turtlesim" type="turtlesim_node" name="turtle2" output="screen"/> </launch>2.运行:
bashroslaunch my_pkg multi_turtle.launch3.观察
- 出现两个 turtlesim 窗口
- 两个节点可以独立运行
实验 4.3 :加载 YAML 参数文件
1.假设已经创建配置文件 config/student.yaml
bashstudent: name: ZhangSan age: 20 score: 952.创建 launch 文件 launch/start_with_param.launch
bash<launch> <!-- 加载参数文件 --> <rosparam file="$(find my_pkg)/config/student.yaml" command="load"/> <!-- 启动节点 --> <node pkg="turtlesim" type="turtlesim_node" name="turtle1" output="screen"/> </launch> 说明: $(find my_pkg):自动查找工作空间中包路径 rosparam 标签加载 YAML 参数到参数服务器 节点可以通过参数服务器获取配置参数3.运行:
bashroslaunch my_pkg start_with_param.launch4.验证参数:
bashrosparam get /student/name rosparam get /student/age rosparam get /student/score
实验 4.4 :节点话题重映射
有时需要同一个节点发布到不同话题或订阅不同话题。
1.创建 launch 文件 launch/remap.launch
bash<launch> <node pkg="turtlesim" type="turtlesim_node" name="turtle1" output="screen"> <remap from="turtle1/cmd_vel" to="turtle1/cmd_vel_custom"/> </node> </launch>2.运行:
bashroslaunch my_pkg remap.launch 说明: 原话题 turtle1/cmd_vel 被重映射为 turtle1/cmd_vel_custom 可以同时运行多个节点而不冲突
实验 4.5 :组合启动(综合实验)
1.创建 Launch 文件 launch/full_system.launch
bash<launch> <!-- 加载学生信息参数 --> <rosparam file="$(find my_pkg)/config/student.yaml" command="load"/> <!-- 启动两个turtlesim节点 --> <node pkg="turtlesim" type="turtlesim_node" name="turtle1" output="screen"/> <node pkg="turtlesim" type="turtlesim_node" name="turtle2" output="screen"> <remap from="turtle1/cmd_vel" to="turtle2/cmd_vel"/> </node> </launch>2.运行:
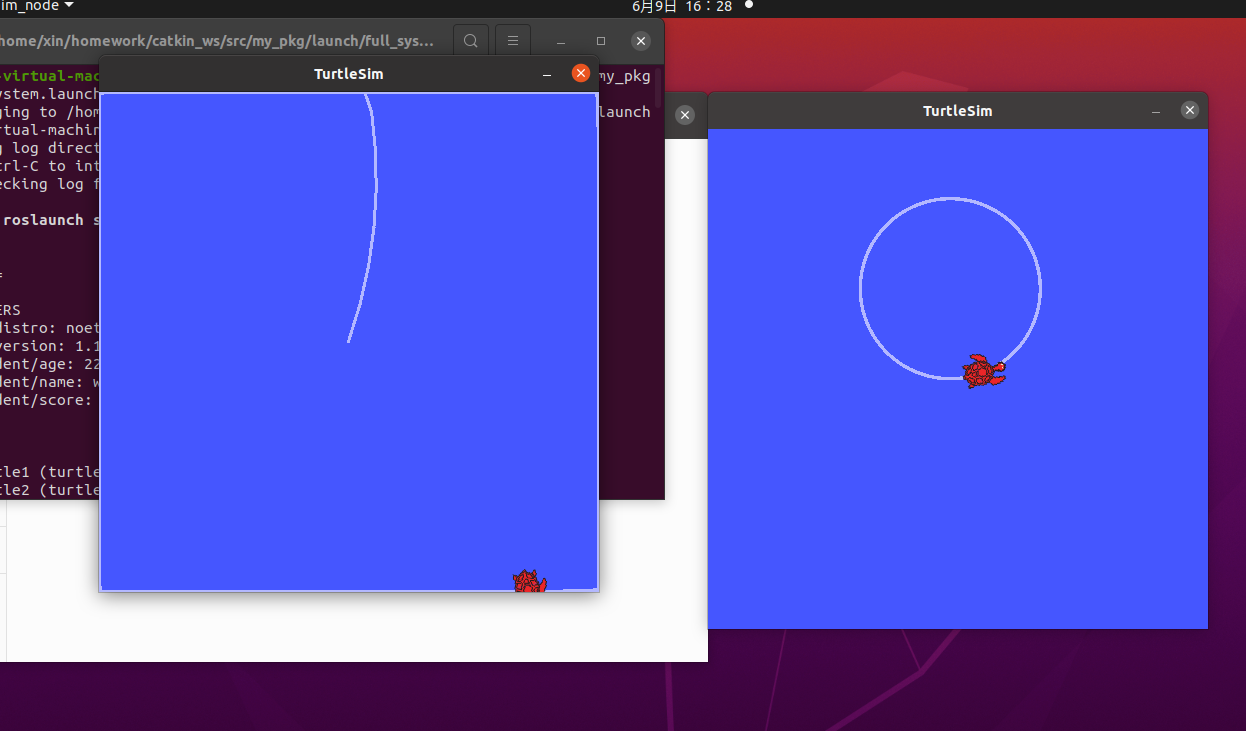
bashroslaunch my_pkg full_system.launch3.任务:
观察两个 turtlesim 节点运行
使用 rosparam get 验证 YAML 参数已加载
截图保存实验结果
五、实验步骤总结创建 launch 目录并进入:
mkdir launch
cd launch
- 创建并编辑 Launch 文件。
- 加载 YAML 参数文件(如果需要)。
- 启动节点并观察运行情况。
- 验证参数服务器参数。
- 记录实验结果与截图。
实验(四):参数服务器读取Python脚本参数
第七天------任务4:参数服务器读取Python脚本参数
python#!/usr/bin/env python3 import rospy if __name__ == "__main__": rospy.init_node("hehe") # 设置全局命名空间下的 turtlesim 背景色(RGB 均为 255,即白色) rospy.set_param("/turtlesim/background_r", 255) rospy.set_param("/turtlesim/background_g", 255) rospy.set_param("/turtlesim/background_b", 255) # 设置当前节点命名空间下的背景色(需配合 __ns 参数运行) rospy.set_param("background_r", 255) rospy.set_param("background_g", 255) rospy.set_param("background_b", 255)2.编译运行
roscore
rosrun my_pkg name.py
rosparame get /background_r
rosparame get /turtlesim/background_r