西门子 S7-1200 基础指令学习笔记
整理人 :元歌(学习笔记,自用备课) 课程来源 :西门子官方培训视频 整理日期 :2026-04-09 学习心得:边学边记,方便下次讲课时照着讲,练习分享用,也怕自己忘了
第一讲:指令概述------先搞清楚博图里的指令家族
1.1 我看到的界面
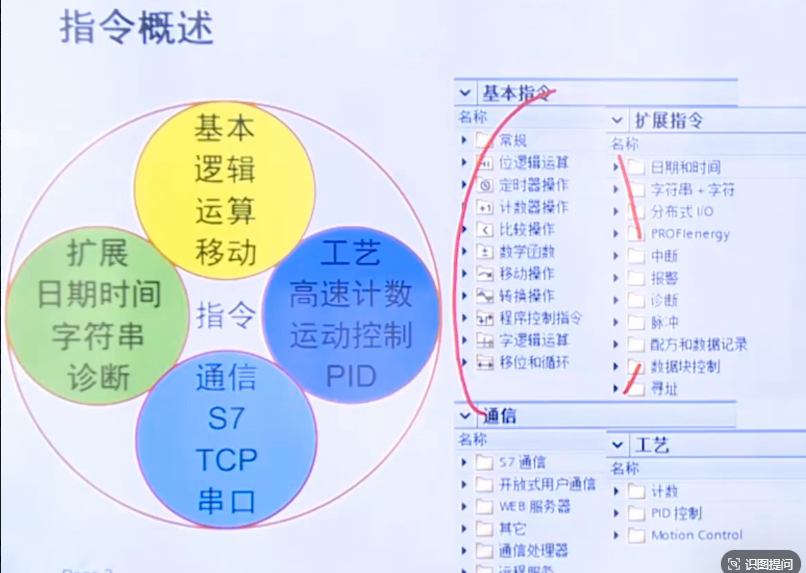
打开 TIA Portal,左边"指令"任务卡里有四大块,我用截图里的颜色记:
课程截图
表格
| 颜色 | 指令家族 | 里面有什么 | 我现在学到哪了 |
|---|---|---|---|
| 🟡 黄色 | 基本指令 | 位逻辑、定时器、计数器、比较、数学函数、移动、转换、移位循环 | 正在学这个 |
| 🟢 绿色 | 扩展指令 | 日期时间、字符串、分布式 I/O、PROFIenergy、中断、报警、诊断、脉冲、配方、数据块控制、寻址 | 还没学到,标记一下 |
| 🔵 蓝色(通信) | 通信 | S7 通信、开放式用户通信、WEB 服务器、其它、通信处理器、远程服务 | 后面专门学通信 |
| 🔵 蓝色(工艺) | 工艺 | 计数、PID 控制、Motion Control | 高速计数和运动控制是高级内容 |
1.2 我的理解
老师说基本指令占日常编程 80% 以上,所以我先把黄色这块啃透。其他颜色先知道有这些东西,以后用到再查。
第二讲:位逻辑运算------最基础,但必须搞扎实
2.1 常开触点、常闭触点、线圈、NOT
我理解的逻辑
-
常开触点
---| |---:地址为 1 时通,为 0 时断。像家里的灯开关,按下去才通电。 -
常闭触点
---|/|---:地址为 0 时通,为 1 时断。像冰箱门开关,门开着灯亮,门关着灯灭。 -
线圈
---( )---:前面能流过来了,就把这个地址置 1;没流过来就置 0。 -
NOT 取反
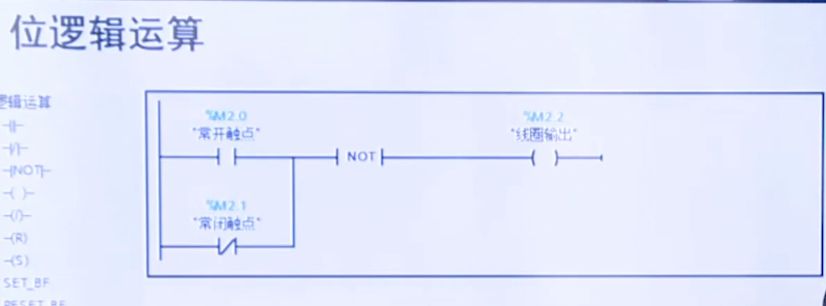
---|NOT|---:把前面的能流状态反过来。前面通了,后面就断;前面断了,后面就通。
截图里的例子
plain
%M2.0 常开触点 ---| |---+
+---|NOT|---( %M2.2 线圈输出 )
%M2.1 常闭触点 ---|/|---+我画个真值表自己验证一下:
我注意到:%M2.1 是常闭触点,所以 %M2.1=1 时触点反而断开。
我的疑问:%M 是存储区,掉电后会不会保持?老师好像说默认不保持,要保存值得用 DB 块或者保持型 M 区。
2.2 SET_BF 和 RESET_BF------批量置位/复位
我第一次见这个指令,以前以为只能一个一个位操作,原来可以批量。
截图里的例子
plain
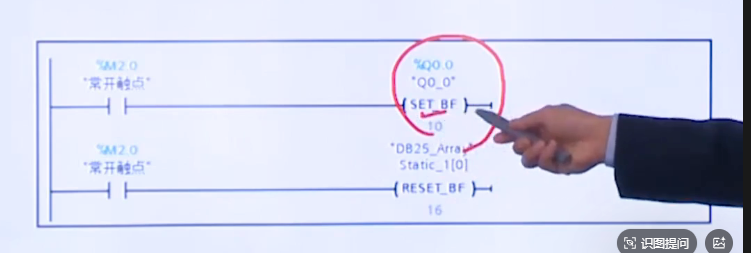
%M2.0 ---| |---( SET_BF %Q0.0 10 )
%M2.0 ---| |---( RESET_BF "DB25_Array".Static_1[0] 16 )表格
| 参数 | 我的理解 |
|---|---|
%Q0.0 |
从 Q0.0 开始 |
10 |
连续 10 个位(Q0.0 ~ Q0.9)全部置 1 |
"DB25_Array".Static_1[0] |
从 DB25 数组的第 0 位开始 |
16 |
连续 16 个位全部清零 |
我想到的应用场景
-
初始化时把一组输出全部置 1
-
报警复位时把一组标志位全部清零
-
比写 16 个
---(R)---省事多了
我记下的注意事项
-
SET_BF 一旦置位,不会自动清零,必须用 RESET_BF 或者单独复位
-
不能跨存储区操作,比如不能从 Q 区批量到 M 区
第三讲:置位复位优先------SR 和 RS 触发器
3.1 我一开始的困惑
为什么要有 SR 和 RS?两个条件控制一个输出,同时满足时听谁的?
3.2 我整理的区别
表格
| 类型 | 名字 | 谁优先 | 我记的方法 |
|---|---|---|---|
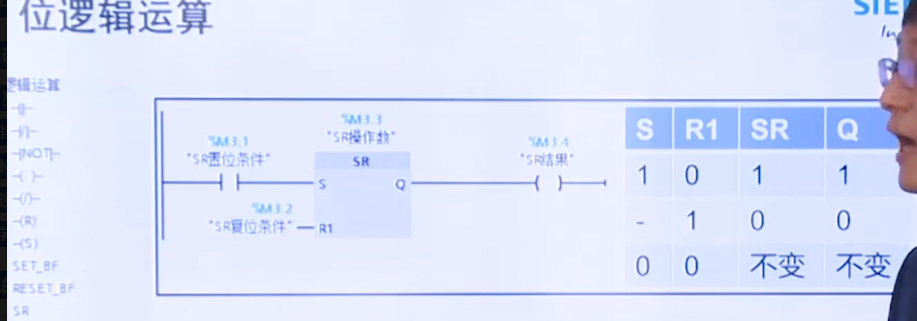
| SR | 置位复位触发器 | 复位优先(R1 端) | "S 在前,R 在后,R 说了算" |
| RS | 复位置位触发器 | 置位优先(S 端) | "R 在前,S 在后,S 说了算" |
注意:SR 的复位端写的是 R1,带个 1,说明它是优先的。
3.3 截图里的 SR 例子
plain
%M3.1 ---| |---( S 端,置位条件 )
%M3.2 ---| |---( R1 端,复位条件 )
|
[SR]
|
Q ---( %M3.4 )真值表(我跟着老师画的):
表格
| S | R1 | SR 内部状态 | Q 输出 |
|---|---|---|---|
| 1 | 0 | 1 | 1 |
| 0 | 1 | 0 | 0 |
| 0 | 0 | 不变 | 不变 |
| 1 | 1 | 0 | 0 |
我的结论 :当 S 和 R1 同时为 1 时,复位优先,输出为 0。
3.4 我想到的实际例子------传送带急停
plain
启动按钮 ---| |---( S 端 )
急停按钮 ---|/|---( R1 端 ) // 急停是常闭,正常时通,按下时断
[SR]
Q ---( 传送带运行 )-
正常启动:按启动按钮,Q=1,传送带运行
-
急停:急停按钮被按下,R1 得电(因为常闭变常开,前面能流过来了?不对,我再想想...)
等等,我重新理一下:急停按钮如果是常闭触点,正常状态下它是通的,R1 不得电(因为常闭触点通的时候,能流过去,但 R1 是输入端...)
哦,我搞混了 。老师说的是急停信号应该接在优先端 ,这样不管启动信号是什么状态,急停一动作就优先断开。具体接线要看硬件是常开还是常闭,但逻辑上停止信号必须优先。
3.5 我的笔记
-
SR 用于"停止优先"的场合,比如急停、安全门
-
RS 用于"启动优先"的场合,比如故障恢复后优先启动
-
搞反了会有安全隐患,这个必须记牢
第四讲:沿指令------脉冲检测,这节我有点绕
4.1 什么是"沿"
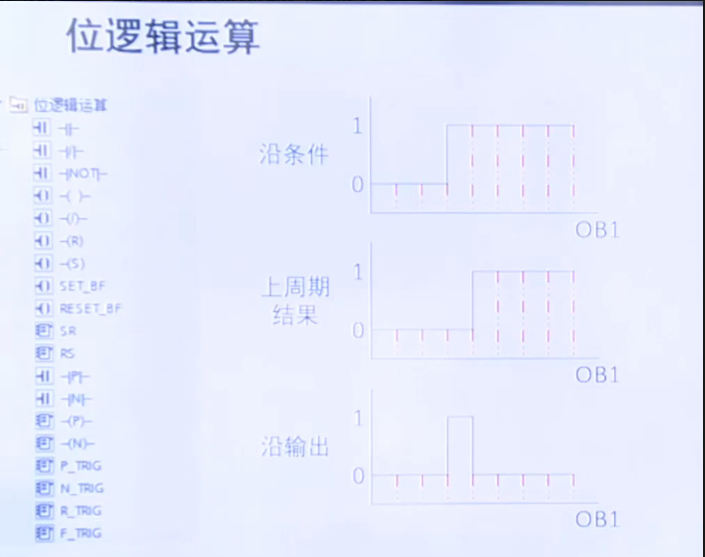
我理解"沿"就是信号跳变的那个瞬间:
-
上升沿:从 0 变到 1 的那一下
-
下降沿:从 1 变到 0 的那一下
4.2 为什么必须用沿指令
我遇到的真实问题:做单按钮控制灯(按一下亮,再按一下灭)。
如果不加沿检测:我按住按钮 1 秒钟,PLC 扫描了 100 次,灯就亮了灭、灭了亮,最后状态不确定。
加了上升沿:只在我按下去的那一瞬间执行一次,灯稳定切换。
4.3 老师讲了 4 种写法,我逐个整理
表格
| 写法 | 指令 | 形态 | 要不要手动存上周期状态 | 我的理解 |
|----|---------------------------|-------|-----------------|-------------|-------|------------|----------------|-----------------|
| 1 | `--- | P | ---/--- | N | ---` | 触点型,串联在逻辑里 | 要,指定一个地址存上周期结果 | 像普通触点,但只通一个扫描周期 |
| 2 | ---(P)--- / ---(N)--- | 线圈型 | 要,指定地址 | 像线圈,输出脉冲 |
| 3 | R_TRIG / F_TRIG | 功能块型 | 不要,自动用背景 DB | 最规范,推荐 |
| 4 | P_TRIG / N_TRIG | 旧版功能块 | 不要 | 和 R_TRIG 类似 |
4.4 截图里的详细对比
写法 1:触点型
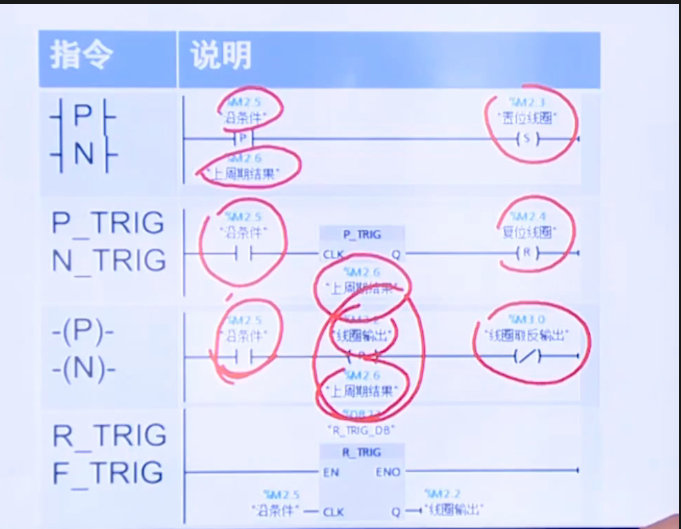
plain
%M2.5 沿条件 ---| |---+
+---|P|---( %M2.3 置位线圈 )
%M2.6 上周期结果 ---| |---+-
%M2.6存的是上一个周期%M2.5的状态 -
当前 %M2.5=1,上周期 %M2.6=0 → 上升沿触发,P 触点通一个周期
写法 2:线圈型
plain
%M2.5 沿条件 ---| |---( %M2.9 线圈输出 )
%M2.6 上周期结果 ---| |---写法 3:R_TRIG 功能块
plain
%M2.5 ---| |---[ R_TRIG ]---( %M2.2 输出 )- 自动在背景 DB 里存上周期状态,我不用管
写法 4:P_TRIG(旧版)
plain
%M2.5 ---| |---[ P_TRIG ]--- CLK
Q ---( %M2.4 复位线圈 )4.5 时序图(我跟着老师画的)
plain
沿条件(当前) 0 0 0 1 1 1 1 1 0 0 0
上周期结果 0 0 0 0 1 1 1 1 1 0 0
沿输出(P) 0 0 0 1 0 0 0 0 0 0 0我的理解:
-
第 4 个扫描周期:当前变 1,上周期是 0 → 输出 1
-
第 5 个周期:当前是 1,上周期也是 1 → 输出 0
-
所以只输出 1 个扫描周期,很短!
4.6 我的笔记和疑问
-
沿指令后面通常跟置位/复位,或者触发一个功能块,不能直接驱动电机(时间太短电机没反应)
-
手动指定"上周期结果"地址时,这个地址不能在其他地方用,否则会被覆盖
-
推荐用 R_TRIG / F_TRIG,因为背景 DB 自动管理,不容易出错
-
扫描周期如果太长(比如 200ms),而按钮只按 100ms,可能检测不到沿
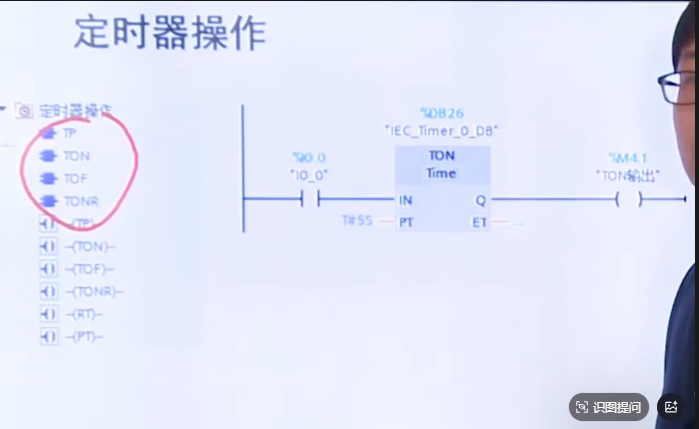
第五讲:定时器------TON、TONR、TOF、TP
5.1 五种定时器我整理的对照表
表格
| 指令 | 中文名 | 我理解的特征 |
|---|---|---|
| TP | 脉冲定时器 | 触发后输出固定时间,期间再触发没用 |
| TON | 通电延时 | 得电后等一段时间再输出,最常用 |
| TOF | 断电延时 | 失电后等一段时间再断开 |
| TONR | 保持型通电延时 | 能累计时间,有记忆,要手动复位 |
| RT | 复位定时器 | 专门给 TONR 复位用的 |
5.2 TON 通电延时(截图例子)
引脚
表格
| 引脚 | 我的理解 |
|---|---|
| IN | 输入信号,接通后开始计时 |
| PT | 我要延时多久,比如 T#5S 是 5 秒 |
| Q | 延时到了输出 1,没到时输出 0 |
| ET | 现在已经计了多久,可以监控 |
截图里的梯形图
plain
%I0.0 ---| |---[ TON ]---( %M4.1 输出 )
PT = T#5S
ET → 显示我的理解:按下 I0.0,等 5 秒后 M4.1 变 1。松开 I0.0,M4.1 立刻变 0,ET 清零。
应用场景我想到的
-
星三角启动:按启动后等 5 秒再切换
-
润滑系统:开机 10 秒后再启动油泵
-
防误触:按钮按住 2 秒才确认
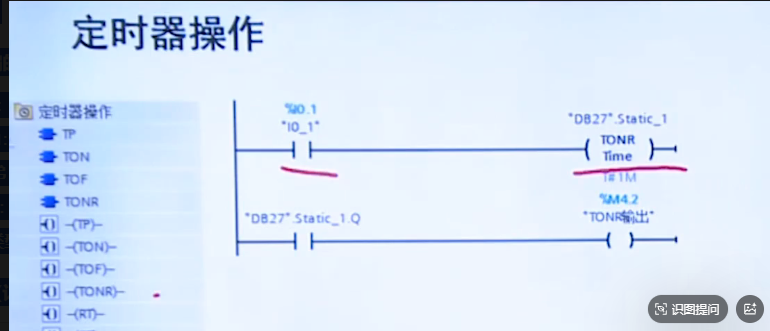
5.3 TONR 保持型通电延时(截图例子)
plain
%I0.1 ---| |---[ TONR ]---( %M4.2 输出 )
PT = T#1M
背景 DB = "DB27".Static_1和 TON 的区别
-
TON:中途断开 IN,ET 清零,下次重新计
-
TONR:中途断开 IN,ET 保持,下次从上次继续累加
应用场景
-
设备累计运行时间:风机累计运行满 100 小时提示保养
-
间歇工作:每次启动工作 10 秒,累计满 1 小时报警
怎么复位? 必须用 ---(RT)--- 指令,或者给 TONR 的 R 端信号。
5.4 定时器时序我画的图
plain
信号 IN: 0───1───0───1───0───1───0
TON 的 Q: 0───0───0───0───1───1───0 (每次重新延时)
TONR 的 Q: 0───0───0───0───0───0───1 (累计,最终到达)
TOF 的 Q: 0───1───1───1───0───0───0 (失电后延时断开)5.5 我的注意事项
-
定时器必须配背景 DB (如
IEC_Timer_0_DB),存 ET 和状态 -
PT 格式:
T#5S(5秒)、T#1M(1分钟)、T#500MS(500毫秒) -
TON 的 ET 在 IN 断开时自动清零 ;TONR 不会自动清零,必须手动复位
-
定时器到达 PT 后,Q 保持 1,ET 也保持,直到 IN 断开
第六讲:计数器------CTU 增计数器
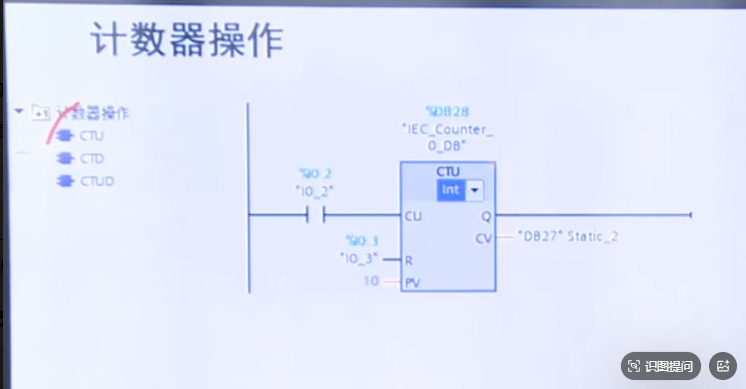
6.1 截图里的例子
plain
%I0.2 ---| |---[ CTU ]--- Q →
%I0.3 ---| |--- CU |
R |
PV = 10
CV → "DB27".Static_2引脚
表格
| 引脚 | 我的理解 |
|---|---|
| CU | 计数输入,上升沿来一次 +1 |
| R | 复位,一接通 CV 清零,Q 变 0 |
| PV | 目标值,我要计到多少 |
| Q | CV ≥ PV 时输出 1 |
| CV | 当前计了多少,实时看 |
6.2 我的理解
-
I0.2 接 CU,每按一次(上升沿),内部计数 +1
-
I0.3 接 R,按下清零
-
按 10 次后,Q 输出 1
-
CV 的值存在
"DB27".Static_2里,可以监控
6.3 应用场景
-
产品计数:传送带传感器每过一个产品 +1,满 100 个打包
-
密码错误次数:输错 3 次锁定
-
步序控制:做完一步 +1,进入下一步
6.4 我的注意事项
-
CU 必须是上升沿,传感器一直通着不会连续加(这是好事)
-
如果需要连续高速计数,用高速计数器 HSC,CTU 跟不上
-
R 端优先级最高,一接通立刻清零,不管 CU 是什么状态
-
CV 是 Int 类型(-32768~32767),超范围要换 DInt 或 UDInt
第七讲:数学函数------ADD 等
6.1 截图里的 ADD 例子
plain
[ ADD_Real ]
EN ------ ENO
IN1 ------ "DB2_Cal".Static_1
IN2 ------ "DB2_Cal".Static_2
IN3 ------ "DB2_Cal".Static_3
OUT ------ "DB2_Cal".Static_4引脚
表格
| 引脚 | 我的理解 |
|---|---|
| EN | 使能,1 才执行 |
| ENO | 执行完没出错输出 1 |
| IN1/IN2/IN3 | 输入,可以多个 |
| OUT | 结果 |
6.2 我整理的常用指令
表格
| 指令 | 功能 | 例子 |
|-------------|------|-------------------------|-----|----|
| ADD | 加 | OUT = IN1 + IN2 + IN3 |
| SUB | 减 | OUT = IN1 - IN2 |
| MUL | 乘 | OUT = IN1 * IN2 |
| DIV | 除 | OUT = IN1 / IN2 |
| MOD | 取余 | OUT = IN1 % IN2 |
| ABS | 绝对值 | `OUT = | IN1 | ` |
| SQRT | 平方根 | OUT = √IN1 |
| SIN/COS/TAN | 三角函数 | 注意输入是弧度 |
6.3 应用场景
-
模拟量换算:0~27648 转成 0.0~10.0V
-
产量累加:每周期产量加到总产量
-
PID 前置:传感器值做滤波、线性化
6.4 我的注意事项
-
数据类型必须一致:截图里是 Real,如果输入 Int 输出 Real,要先转换
-
除零错误 :IN2=0 时 ENO=0,程序不会崩,但 OUT 保持原值,建议后面判断 ENO 或 IN2
-
浮点精度:Real 有效数字约 6~7 位,大量累加可能有微小误差,高精度用 LReal
-
ENO 的用法:运算出错 ENO=0,可以触发报警
我的学习总结
核心口诀(我编的,方便记)
-
SR 复位优先:急停接 R1,安全有保障
-
沿指令 4 选 1 :小项目用
---|P|---,大项目用R_TRIG -
定时器 5 兄弟:TON 最常用,TONR 有记忆,TOF 断后延,TP 固定宽
-
计数器看 CU:上升沿才加 1,R 端一来全清零
-
数学函数看类型:Real 对 Real,Int 对 Int,除零 ENO 会报警
我常犯的错误(记下来提醒自己)
表格
| 错误 | 原因 | 我下次注意 |
|---|---|---|
| 定时器不计时 | PT 格式写错,或背景 DB 丢了 | 检查 T#5S 格式,确认 DB 存在 |
| 沿指令不触发 | 上周期状态地址被别的程序改了 | 用 R_TRIG,自动管理 DB |
| 计数器只加一次 | 传感器一直通,没有跳变 | 检查传感器是不是脉冲信号 |
| SR 输出不对 | 搞混了 SR 和 RS | 记住:SR 是复位优先,RS 是置位优先 |
| 数学结果不对 | 类型不匹配,或者除零 | 统一类型,判断 ENO |
由于笔记太长,这个基础指令我分成二篇来记录,
附录:我计划的讲课思路(如果我要给别人讲)
第一课时(45分钟)
-
开场(5分钟):展示指令地图,说今天学黄色区域
-
位逻辑(15分钟):现场画常开/常闭/NOT,演示 SET_BF 批量操作
-
SR 触发器(10分钟):重点讲复位优先,用急停做例子,背真值表
-
沿指令(15分钟):画时序图,对比 4 种写法,演示单按钮启停灯
第二课时(45分钟)
-
复习(5分钟):快速提问"SR 谁优先?沿指令有几种?"
-
定时器(20分钟):讲 TON 时序,再讲 TONR 记忆,用星三角和累计时间举例
-
计数器(10分钟):模拟传送带计数,演示 CU 和 R
-
数学函数(10分钟):演示 ADD 做模拟量换算,强调类型和除零
我的备注:这份笔记是我边学边整理的,可能有理解不到位的地方,后续学到新内容再补充。如果有讲错的地方,欢迎大家指正。