工具坐标系 → 工具的"指尖"
固定在哪:你装在机器人末端上的工具的工作点(比如焊枪头、吸盘中心、笔尖)。
通俗理解:就像你手里拿着一支笔,你真正关心的是笔尖的位置,而不是笔杆或手腕。这个"笔尖"就是工具坐标系。
为什么需要标定:因为不同的工具长度、形状不同,你必须告诉机器人"笔尖离我的手碗有多远"。标定就是让机器人学会这个偏移量。
好处:换工具后,只要重新标定一下,原来的程序(比如"让笔尖画个圆")依然能用,因为机器人会自动根据新工具计算手腕该怎么动。
用户坐标系 → 工件上的"临时桌面"
固定在哪:你加工的工件上(比如一个倾斜的工件、一个盒子的角)。
通俗理解:就像你在纸上画图,你会把坐标原点设在纸的角上,而不是设在机器人脚底下。这样你描述"在纸上画一条横线"就很简单。
为什么需要标定:工件可能被移动或倾斜。你只需要标定一次这个工件相对于机器人脚底的位置,然后程序里所有关于工件的移动(比如"沿着工件边缘走")都用这个工件坐标来描述。如果工件位置变了,重新标定一下工件坐标,程序不用改,机器人会自动算出手腕该怎么动。
好处:极大简化编程。比如你要打磨一个倾斜的曲面,你只需要在工件坐标系里定义"沿着曲面走",机器人会自动倾斜手腕去贴合。
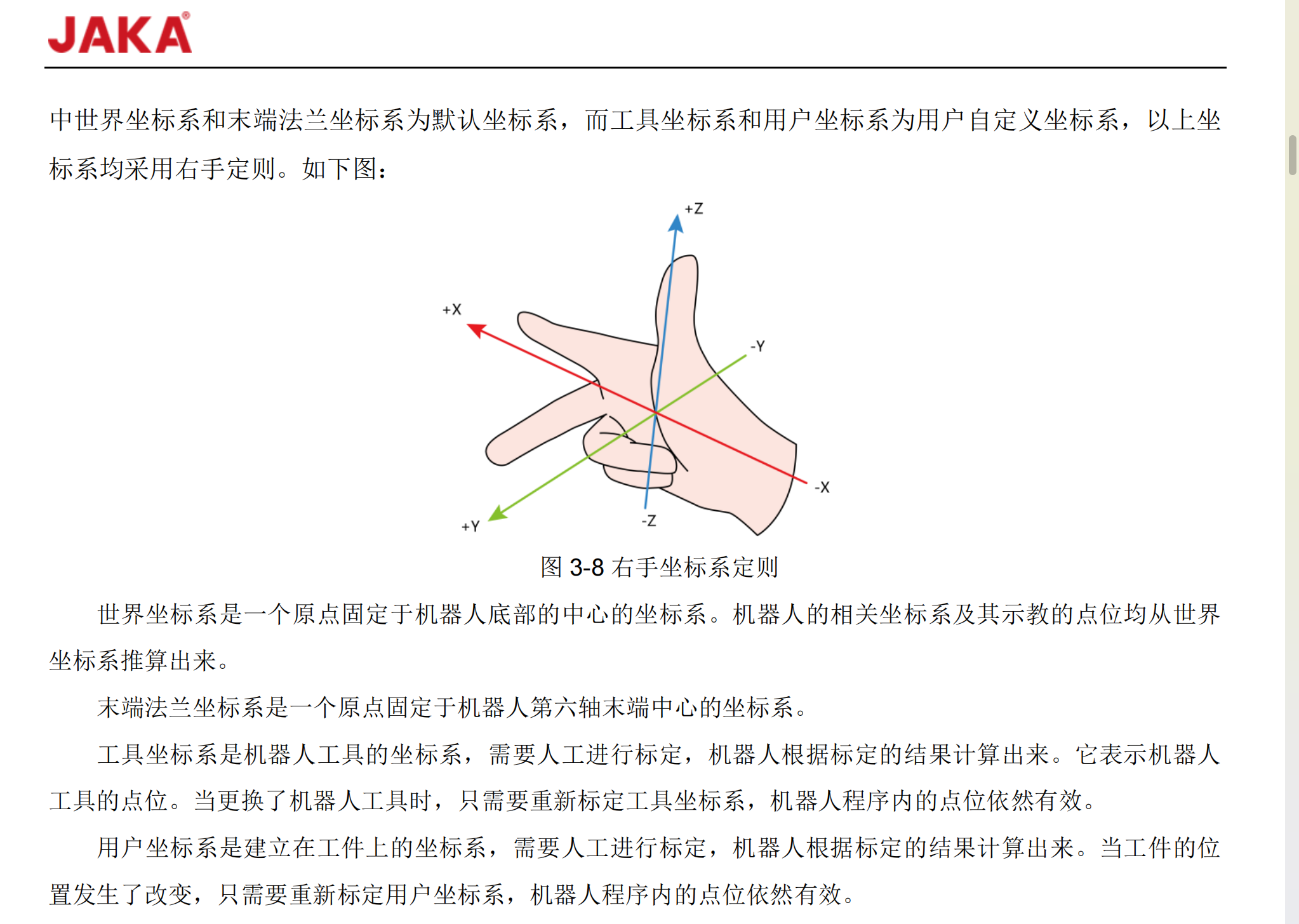
世界坐标系 → 机器人的"绝对大地"
固定在哪:机器人底座的中心,永远不动。
通俗理解:就像地球上的经纬度。不管机器人怎么动,这个坐标的原点(0点)始终在它脚底下。所有其他坐标都是相对于这个"大地"来计算的。
用途:告诉机器人"你所在的厂房/地面空间"的全局位置。
末端法兰坐标系 → 机器人的"手腕"
固定在哪:机器人第六轴(最末端)的安装盘中心。
通俗理解:就像你的手腕。你的手掌可以装不同的工具(比如笔、螺丝刀),但这个手腕本身的位置和方向是机器人能直接感知的。
末端法兰坐标系 = 机器人手腕末端的"骨头端点",它固定在机器人最后一个关节的安装圆盘(法兰)的正中心,随机器人最后一轴一起运动。
用途:机器人知道自己手腕在空间中的哪里,但不知道手上拿的工具的尖端在哪里。
简单理解:让机器人的工具尖端(工具坐标系原点)在三维空间中沿直线移动,而不是让机器人的某个关节单独转。
所以文中所说"各个关节的联合运动"就是指:机器人电脑自动计算所有关节的角度,使得工具尖端走直线或圆弧。
文中说"机器人的工具坐标系原点在当前用户坐标系中做相对应的空间运行"------意思是:你滑动虚拟摇杆时,机器人会让工具尖端相对于用户坐标系的轴移动(比如上下、左右、前后)。如果你切换到工具坐标系,那么摇杆的移动方向就会相对于工具自身的方向。
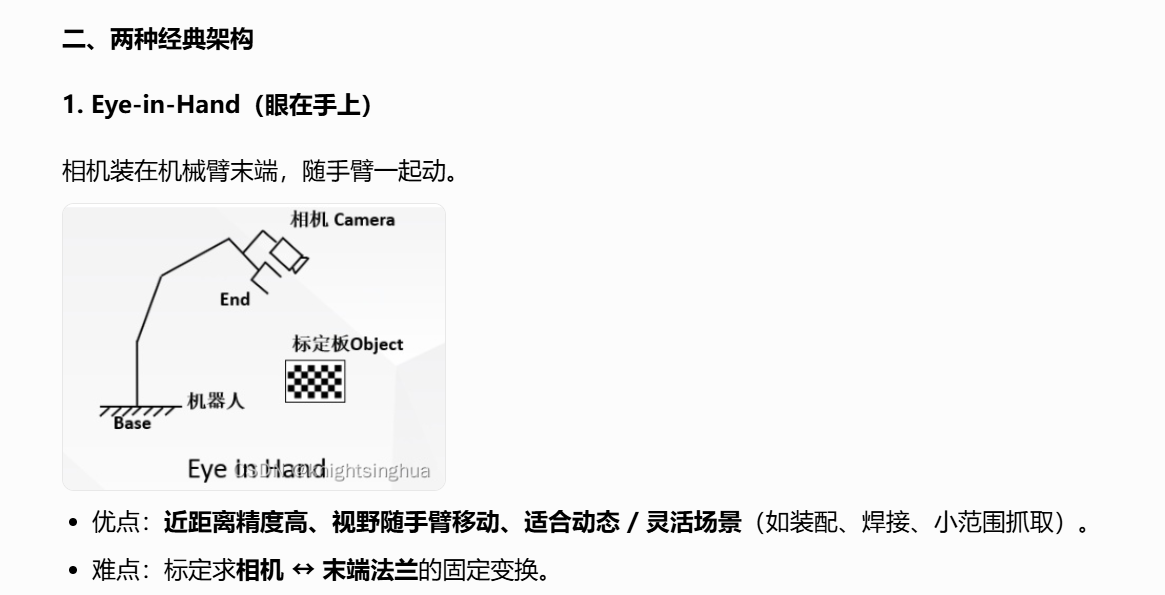
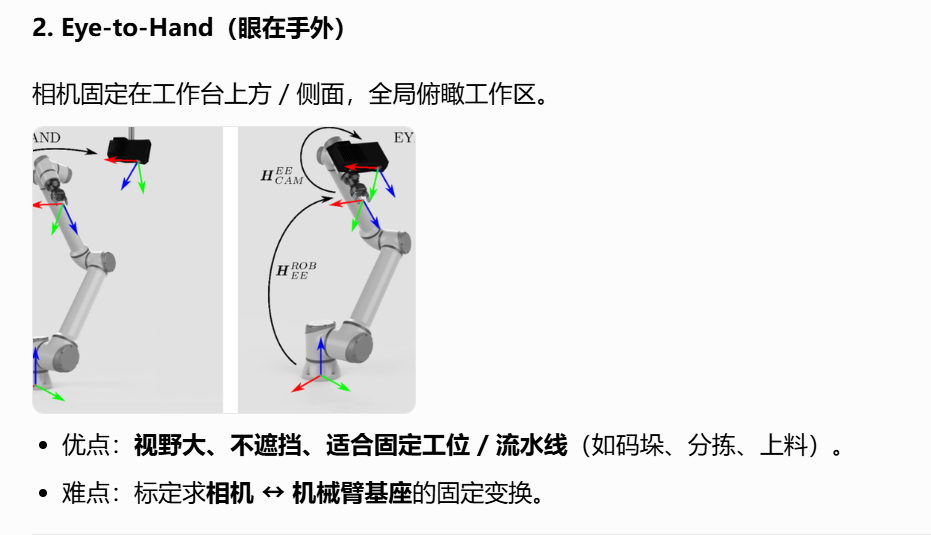
机械臂的手眼技术
机械臂手眼技术的核心,就是把相机的 "像素坐标" 翻译成机械臂能执行的 "空间坐标",让视觉定位与手臂动作精准对齐。下面从概念、架构、数学本质、流程与应用几方面通俗理解。
一、为什么需要手眼技术?
相机(眼):输出像素坐标(u,v),只有平面位置,不知道深度,且镜头有畸变。
机械臂(手):工作在三维空间坐标系(x,y,z,R,P,Y),只认自身基座 / 末端的坐标。
两者 "语言不通":不做标定,相机看到的目标位置,机械臂无法精准到达。
类比:人用手抓东西,大脑必须知道 "眼睛→手" 的空间关系;手眼标定就是给机械臂建立这种 "大脑映射"。
手眼标定:https://blog.csdn.net/qq_45006390/article/details/121670412