Franka Panda 机械臂强化学习项目 --- 技术文档(已开源)
PPO + MuJoCo 强化学习训练框架 --- 单臂目标到达 / 单臂避障 / 双臂避障
目录
- [1. 项目概述](#1. 项目概述)
- [2. 核心算法原理](#2. 核心算法原理)
- [3. 任务详解](#3. 任务详解)
- [3.1 Reach Target(目标到达)](#3.1 Reach Target(目标到达))
- [3.2 Obstacle Avoidance(单臂避障)](#3.2 Obstacle Avoidance(单臂避障))
- [3.3 Dual Arm Obstacle(双臂避障)](#3.3 Dual Arm Obstacle(双臂避障))
- [4. 代码结构](#4. 代码结构)
- [5. 关键实现详解](#5. 关键实现详解)
- [6. 配置参数与调优指南](#6. 配置参数与调优指南)
- [7. 运行步骤](#7. 运行步骤)
- [8. 三文件对比分析](#8. 三文件对比分析)
- [9. 常见问题与解决方案](#9. 常见问题与解决方案)
- 贡献
- 引用
- License
- 致谢
1. 项目概述
本项目包含三个基于 PPO (Proximal Policy Optimization) 算法的 Franka Emika Panda 机械臂强化学习任务,使用 MuJoCo 物理引擎仿真和 Stable-Baselines3 训练框架。相关仿真如下:
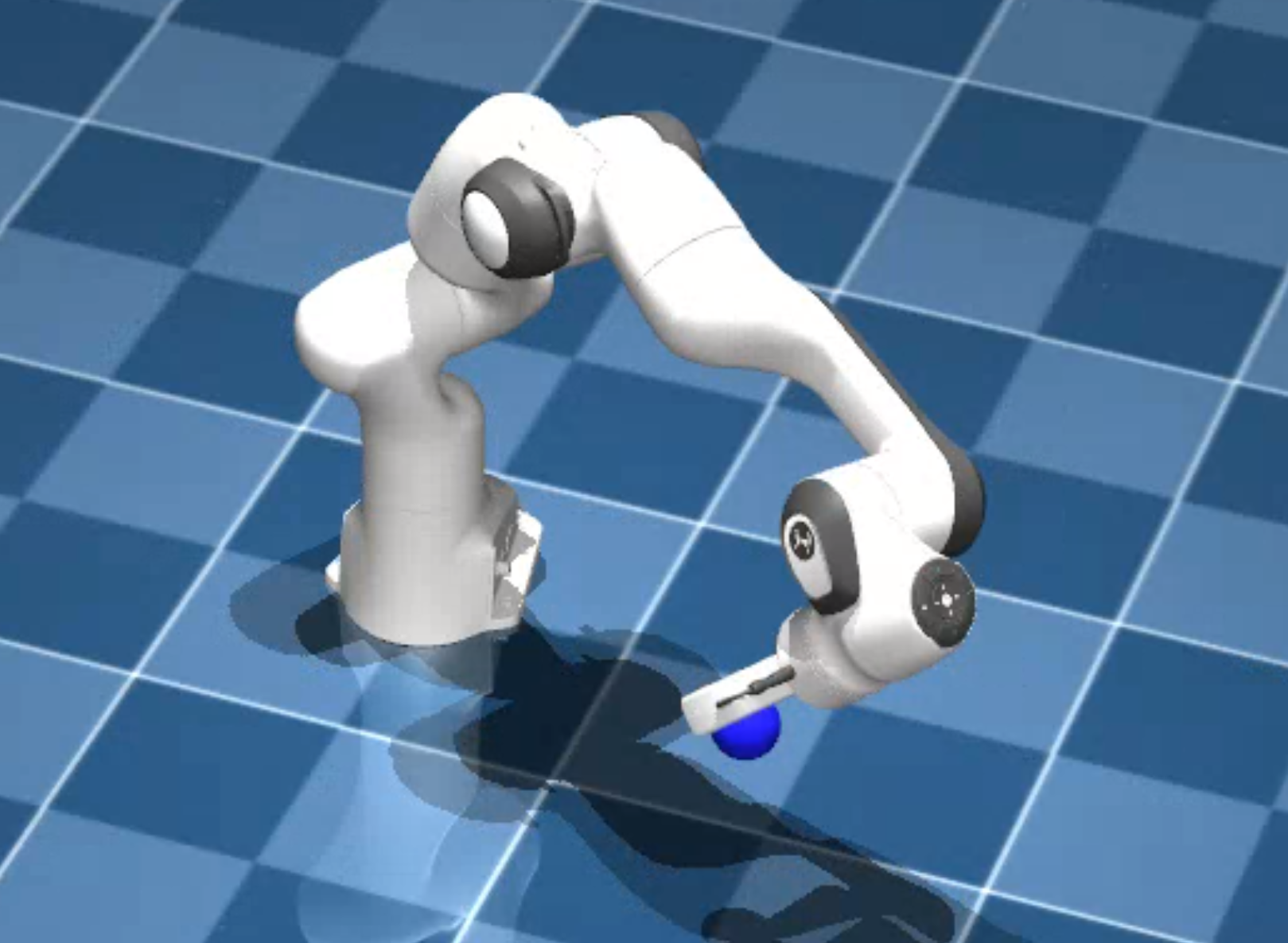
1)Reach Target:
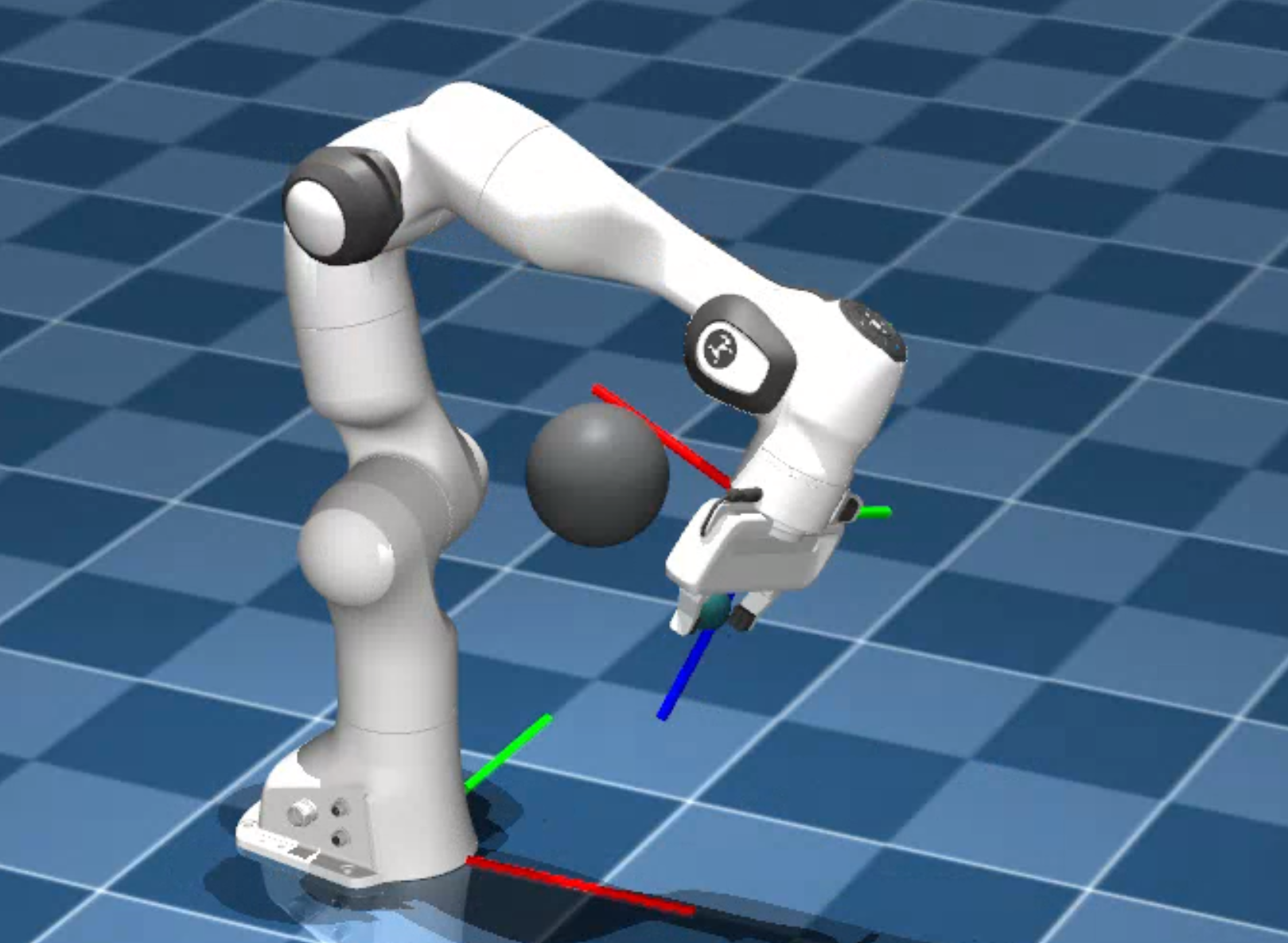
2)Obstacle Avoidance:
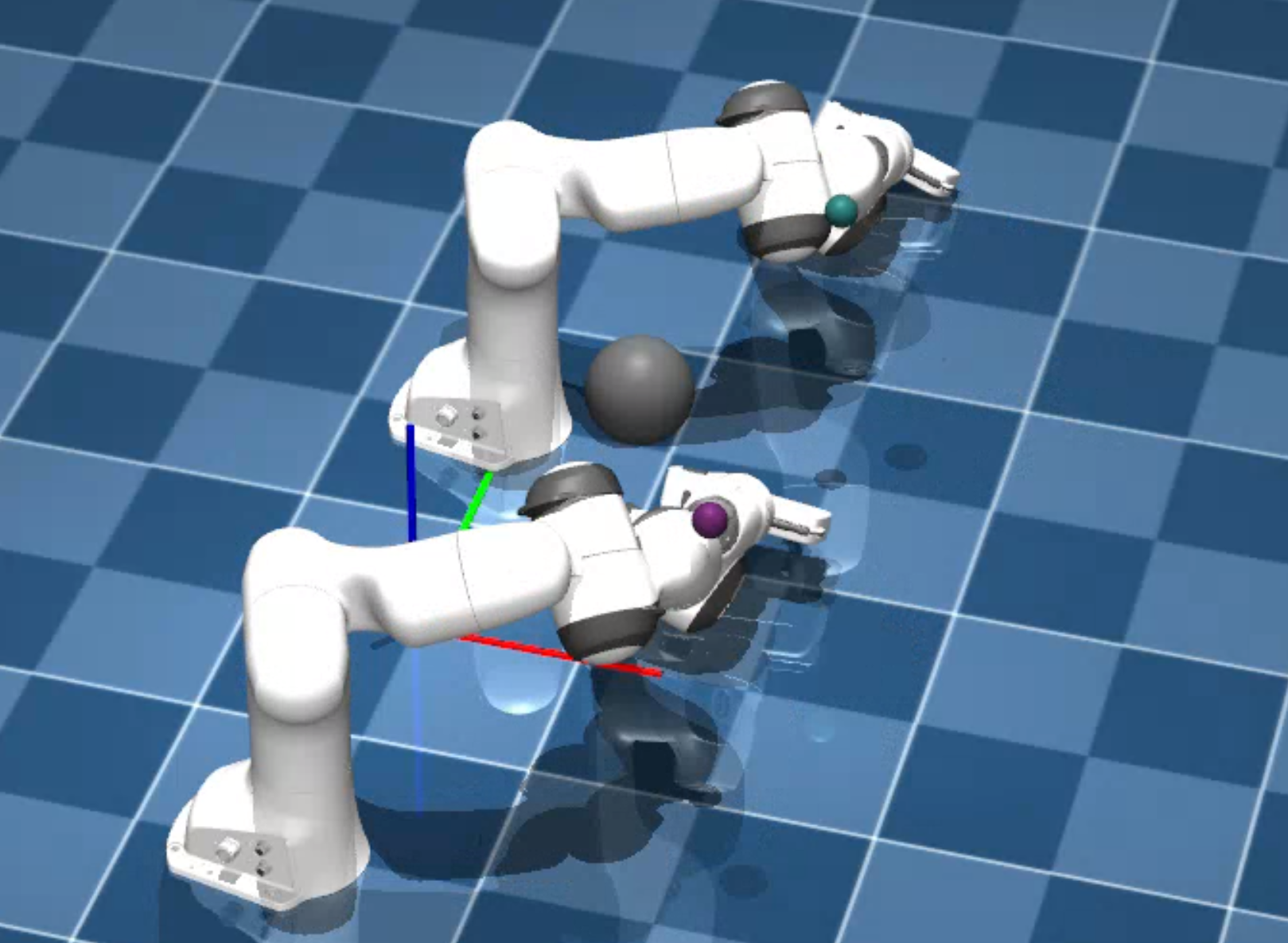
3)Dual Arm Obstacle(训练阶段);
1.1 三个任务总览
| 属性 | Reach Target | Obstacle Avoidance | Dual Arm Obstacle |
|---|---|---|---|
| 主文件 | rl_panda_reach_target_high_profile.py |
rl_panda_obstacle_high_profile.py |
rl_dual_arm_obstacle.py |
| 任务 | 单臂末端到达随机目标点 | 单臂到达目标并避开障碍物 | 双臂分别到达目标并避开障碍物 |
| 机械臂数量 | 1 | 1 | 2 (左臂 + 右臂) |
| 障碍物 | 无 | 1个球体 | 1个球体 |
| 动作空间 | 7维 [-1,1] |
7维 [-1,1] |
14维 [-1,1] |
| 观测空间 | 20维 | 27维 | 50维 |
| 动作类型 | delta 增量控制 | absolute 绝对控制 | delta 增量控制 |
| 架构 | 模块化(env/reward/config/callbacks) | 单体文件 | 单体文件 |
| 模型场景 | scene.xml |
scene_pos_with_obstacles.xml |
scene_dual_arm_with_obstacles.xml |
1.2 硬件要求
| 组件 | 最低配置 | 推荐配置 |
|---|---|---|
| CPU | 8 核 | 20+ 核 |
| GPU | 无(CPU可训练) | NVIDIA GPU (CUDA) |
| RAM | 16 GB | 32 GB |
| 操作系统 | Linux | Ubuntu 20.04+ |
1.3 核心依赖
Python 3.11+
MuJoCo 3.3+
Stable-Baselines3 2.6+
Gymnasium 1.1+
PyTorch 2.x
NumPy, SciPy
TensorBoard (可视化)2. 核心算法原理
2.1 PPO 算法
PPO (Proximal Policy Optimization) 是一种基于策略梯度的强化学习算法,通过限制策略更新幅度来保证训练稳定性。
核心思想:在新旧策略之间加一个"信任域"约束,防止策略更新过大导致性能崩溃。
PPO-Clip 目标函数
L C L I P ( θ ) = E t min ( r t ( θ ) A \^ t , clip ( r t ( θ ) , 1 − ϵ , 1 + ϵ ) A \^ t ) L^{CLIP}(\theta) = \mathbb{E}_t\left\\min\\left(r_t(\\theta) \\hat{A}_t,\\ \\text{clip}(r_t(\\theta), 1-\\epsilon, 1+\\epsilon) \\hat{A}_t\\right)\\right LCLIP(θ)=Etmin(rt(θ)A\^t, clip(rt(θ),1−ϵ,1+ϵ)A\^t)
其中概率比 r t ( θ ) = π θ ( a t ∣ s t ) π θ o l d ( a t ∣ s t ) r_t(\theta) = \frac{\pi_\theta(a_t|s_t)}{\pi_{\theta_{old}}(a_t|s_t)} rt(θ)=πθold(at∣st)πθ(at∣st), ϵ \epsilon ϵ 为裁剪范围(通常 0.2), A ^ t \hat{A}_t A^t 为优势函数估计。
GAE (Generalized Advantage Estimation)
A ^ t G A E ( γ , λ ) = ∑ l = 0 ∞ ( γ λ ) l δ t + l \hat{A}t^{GAE(\gamma,\lambda)} = \sum{l=0}^{\infty} (\gamma\lambda)^l \delta_{t+l} A^tGAE(γ,λ)=l=0∑∞(γλ)lδt+l
其中 TD 误差 δ t = r t + γ V ( s t + 1 ) − V ( s t ) \delta_t = r_t + \gamma V(s_{t+1}) - V(s_t) δt=rt+γV(st+1)−V(st), γ \gamma γ 为折扣因子, λ \lambda λ 控制偏差-方差权衡。
价值函数损失
L V F ( θ ) = E t ( V θ ( s t ) − V t t a r g e t ) 2 L^{VF}(\theta) = \mathbb{E}_t\left(V_\\theta(s_t) - V_t\^{target})\^2\\right LVF(θ)=Et(Vθ(st)−Vttarget)2
熵奖励
L E N T ( θ ) = E t H ( π θ ( ⋅ ∣ s t ) ) L^{ENT}(\theta) = \mathbb{E}_t\left\\mathcal{H}(\\pi_\\theta(\\cdot\|s_t))\\right LENT(θ)=EtH(πθ(⋅∣st))
总损失: L = L C L I P − c 1 L V F + c 2 L E N T L = L^{CLIP} - c_1 L^{VF} + c_2 L^{ENT} L=LCLIP−c1LVF+c2LENT
2.2 训练架构
+------------------------------------------------------------------------------------+
| 主进程 (GPU) |
| +-------------------------- PPO Agent ------------------------------------------+ |
| | MlpPolicy | |
| | +----------------------+ +----------------------+ | |
| | | Actor (pi) | | Critic (vf) | | |
| | | 256->256->128 | | 512->256->128 | | |
| | | -> action_dist | | -> value | | |
| | +----------------------+ +----------------------+ | |
| | activation: Tanh, ortho_init: True | |
| +--------------------------------------------------------------------------------+ |
| | rollout data (n_steps x n_envs) |
| +--------------------------------------------------------------------------------+ |
| | SubprocVecEnv (24 并行进程, CPU) | |
| | +--------+ +--------+ +--------+ +----------+ | |
| | | Env 0 | | Env 1 | | Env 2 | ... | Env 23 | | |
| | | MuJoCo | | MuJoCo | | MuJoCo | | MuJoCo | | |
| | +--------+ +--------+ +--------+ +----------+ | |
| | VecNormalize (obs + reward 归一化) | |
| +--------------------------------------------------------------------------------+ |
+------------------------------------------------------------------------------------+关键流程:
- 24 个 MuJoCo 环境在 CPU 上并行运行,每个独立仿真
- 从所有环境收集
n_steps步 transition - 数据从 CPU 传输到 GPU
- PPO 进行
n_epochs轮策略更新 - 循环直到
total_timesteps
2.3 动作空间设计
Reach Target / Dual Arm (Delta Control)
python
action in [-1, 1]^N
target_joint_pos = current_joint_pos + action * action_scale * joint_range_width
target_joint_pos = clip(target_joint_pos, joint_min, joint_max)优势:动作在当前位置附近探索,轨迹天然平滑,适合精确到达任务。解决"机械臂运动过快"的关键设计。
Obstacle Avoidance (Absolute Control)
python
action in [-1, 1]^N
scaled = joint_min + (action + 1) * 0.5 * (joint_max - joint_min)优势:一步可到达关节空间任意位置,适合需要大范围运动的任务。
2.4 多子步仿真
每次环境步执行 n_substeps 次 MuJoCo 物理步进,确保 PD 位置控制器能平滑响应:
python
for _ in range(self._n_substeps): # 默认 5 次
mujoco.mj_step(self.model, self.data)3. 任务详解
3.1 Reach Target(目标到达)
文件 :rl_panda_reach_target_high_profile.py
MuJoCo 场景 :model/franka_emika_panda/scene.xml
单臂 Panda 机械臂从初始位置出发,使末端执行器到达工作空间内的随机目标点。
观测空间(20维)
O = q 1 : 7 , q ˙ 1 : 7 , p e e , p g o a l − p e e O = q_{1:7},\\ \\dot{q}_{1:7},\\ p_{ee},\\ p_{goal} - p_{ee} O=q1:7, q˙1:7, pee, pgoal−pee
| 索引 | 内容 | 维度 | 物理含义 |
|---|---|---|---|
| 0-6 | joint_pos |
7 | 关节角度 (rad) |
| 7-13 | joint_vel |
7 | 关节角速度 (rad/s) |
| 14-16 | ee_pos |
3 | 末端执行器三维位置 |
| 17-19 | ee_to_goal |
3 | ee -> goal 向量 |
动作空间(7维)
a ∈ − 0.1 , 0.1 7 (delta control, action_scale = 0.1) a \in -0.1, 0.1^7 \quad \text{(delta control, action\_scale = 0.1)} a∈−0.1,0.17(delta control, action_scale = 0.1)
奖励函数(7项组合)
由 ReachTargetReward 类实现:
R = R d i s t + R l i n − P c o l l i s i o n − P s m o o t h − P o r i e n t − P j o i n t − P d e v i a t i o n R = R_{dist} + R_{lin} - P_{collision} - P_{smooth} - P_{orient} - P_{joint} - P_{deviation} R=Rdist+Rlin−Pcollision−Psmooth−Porient−Pjoint−Pdeviation
| 项 | 方向 | 公式 | 权重 |
|---|---|---|---|
distance_reward |
正向 | 越近越大,到达阈值给成功奖励 100.0 |
success_reward=100 |
linearity_reward |
正向 | 奖励沿起点->目标直线的运动 3.0/(1+error) |
3.0 |
collision_penalty |
负向 | 排除自碰撞,对外部碰撞计数惩罚 | 1.0 |
smooth_penalty |
负向 | 惩罚相邻动作差异 `0.1 x | |
orientation_penalty |
负向 | 惩罚 ee z 轴偏离垂直向下 0.3 x angle_err |
0.3 |
joint_limit_penalty |
负向 | 跨越关节限制时线性惩罚 | 0.5 |
deviation_penalty |
负向 | 轨迹偏离历史最优直线路径 | 1.0 |
终止条件
| 条件 | 信号 | 奖励 |
|---|---|---|
dist_to_goal < 0.005m |
terminated=True |
+50.0 |
step_count >= 500 |
truncated=True |
-5.0 |
高级特性
- 课程学习:6级渐进目标距离 (0.2m -> 0.3m -> 0.4m -> 0.5m -> 0.6m -> 0.7m),成功率 > 80% 自动升级
- 域随机化:关节阻尼随机倍乘 0.5, 2.0,提升泛化性
- EvalCallback:训练中自动评估并保存最佳模型
- CheckpointCallback:定期保存检查点
- 线性学习率衰减:训练过程中 LR 从 3e-4 线性衰减到 3e-6
3.2 Obstacle Avoidance(单臂避障)
文件 :rl_panda_obstacle_high_profile.py
MuJoCo 场景 :model/franka_emika_panda/scene_pos_with_obstacles.xml
单臂 Panda 机械臂在工作空间内到达随机目标点,同时避开场景中的障碍球。
观测空间(27维)
O = q 1 : 7 , q ˙ 1 : 7 , p e e , p g o a l − p e e , p o b s − p e e , d o b s , p o b s O = q_{1:7},\\ \\dot{q}_{1:7},\\ p_{ee},\\ p_{goal} - p_{ee},\\ p_{obs} - p_{ee},\\ d_{obs},\\ p_{obs} O=q1:7, q˙1:7, pee, pgoal−pee, pobs−pee, dobs, pobs
| 索引 | 内容 | 维度 | 物理含义 |
|---|---|---|---|
| 0-6 | joint_pos |
7 | 关节角度 (rad) |
| 7-13 | joint_vel |
7 | 关节角速度 (rad/s) |
| 14-16 | ee_pos |
3 | 末端执行器三维位置 |
| 17-19 | ee_to_goal |
3 | ee -> goal 向量 |
| 20-22 | ee_to_obstacle |
3 | ee -> obstacle 向量 |
| 23 | dist_to_obstacle |
1 | ee 到障碍物表面的距离 |
| 24-26 | obstacle_pos |
3 | 障碍物三维位置 |
动作空间(7维)
a ∈ − 1 , 1 7 (absolute control) a \in -1, 1^7 \quad \text{(absolute control)} a∈−1,17(absolute control)
q t a r g e t i = q m i n i + a i + 1 2 × ( q m a x i − q m i n i ) q_{target}^i = q_{min}^i + \frac{a_i + 1}{2} \times (q_{max}^i - q_{min}^i) qtargeti=qmini+2ai+1×(qmaxi−qmini)
奖励函数
R = R d i s t − P c o l l i s i o n − P s m o o t h − P j o i n t − P s t e p R = R_{dist} - P_{collision} - P_{smooth} - P_{joint} - P_{step} R=Rdist−Pcollision−Psmooth−Pjoint−Pstep
| 奖励项 | 方向 | 公式 |
|---|---|---|
distance_reward |
正向 | 分段函数:阈值内 40.0->5.0,阈值外 1/(1+d) |
collision_penalty |
负向 | 检测到碰撞 -10.0 并立即终止 |
smooth_penalty |
负向 | `0.001 x |
joint_penalty |
负向 | 超出关节范围 0.5 x error |
step_penalty |
负向 | 0.001 x step_count 步数惩罚替代时间惩罚 |
终止条件
| 条件 | 信号 | 奖励 |
|---|---|---|
dist_to_goal < 0.005m |
terminated=True |
+50.0 |
| 碰撞 | terminated=True |
-10.0 |
step_count >= 500 |
truncated=True |
-5.0 |
关键特性
- 单文件自包含实现(内联环境类 + 训练/测试函数)
- 绝对位置控制,适合需要大范围运动场景
- 碰撞检测排除自碰撞和地面接触
- 每步执行 1 次
mj_step(无子步)
3.3 Dual Arm Obstacle(双臂避障)
MuJoCo 场景 :model/franka_emika_panda/scene_dual_arm_with_obstacles.xml
左右两台 Panda 机械臂分别放置于 (0, 0.4, 0) 和 (0, -0.4, 0),各自到达空间中的随机目标点,同时避开障碍物。这是最具挑战性的任务------14维动作空间和50维观测空间,需要协调双臂运动。
观测空间(50维)
O = q L , q R , q ˙ L , q ˙ R , p L , p R , Δ p L , Δ p R , Δ o L , Δ o R , d o b s m i n , p o b s O = q_L, q_R, \\dot{q}_L, \\dot{q}_R, p_L, p_R, \\Delta p_L, \\Delta p_R, \\Delta o_L, \\Delta o_R, d_{obs}\^{min}, p_{obs} O=qL,qR,q˙L,q˙R,pL,pR,ΔpL,ΔpR,ΔoL,ΔoR,dobsmin,pobs
| 索引 | 内容 | 维度 | 物理含义 |
|---|---|---|---|
| 0-6 | left_joint_pos |
7 | 左臂关节角度 |
| 7-13 | right_joint_pos |
7 | 右臂关节角度 |
| 14-20 | left_joint_vel |
7 | 左臂关节角速度 |
| 21-27 | right_joint_vel |
7 | 右臂关节角速度 |
| 28-30 | left_ee_pos |
3 | 左臂末端位置 |
| 31-33 | right_ee_pos |
3 | 右臂末端位置 |
| 34-36 | left_ee_to_goal |
3 | 左臂末端->目标 |
| 37-39 | right_ee_to_goal |
3 | 右臂末端->目标 |
| 40-42 | left_ee_to_obs |
3 | 左臂末端->障碍物 |
| 43-45 | right_ee_to_obs |
3 | 右臂末端->障碍物 |
| 46 | min_dist_obs |
1 | 双臂到障碍物的最小距离 |
| 47-49 | obstacle_position |
3 | 障碍物三维位置 |
动作空间(14维)
a = a l e f t 1 , . . . , a l e f t 7 , a r i g h t 1 , . . . , a r i g h t 7 ∈ − 1 , 1 14 a = a_{left}\^1, ..., a_{left}\^7, a_{right}\^1, ..., a_{right}\^7 \in -1, 1^{14} a=aleft1,...,aleft7,aright1,...,aright7∈−1,114
使用增量位置控制 (delta control),action_scale = 0.05:
q t a r g e t i = q c u r r e n t i + a i × 0.05 × ( q m a x i − q m i n i ) q_{target}^i = q_{current}^i + a_i \times 0.05 \times (q_{max}^i - q_{min}^i) qtargeti=qcurrenti+ai×0.05×(qmaxi−qmini)
q t a r g e t i = clip ( q t a r g e t i , q m i n i , q m a x i ) q_{target}^i = \text{clip}(q_{target}^i, q_{min}^i, q_{max}^i) qtargeti=clip(qtargeti,qmini,qmaxi)
奖励函数
R = − 1.0 ⋅ ( d l e f t + d r i g h t ) ⏟ 距离塑形 + 10.0 ⋅ ( Δ d l e f t + Δ d r i g h t ) ⏟ 进度奖励 − 0.001 ⋅ ( ∣ ∣ q ˙ L ∣ ∣ 2 + ∣ ∣ q ˙ R ∣ ∣ 2 ) ⏟ 速度惩罚 − 0.01 ⋅ ∣ ∣ δ a ∣ ∣ ⏟ 平滑惩罚 − 20.0 ⋅ 1 c o l l i s i o n ⏟ 碰撞惩罚 − P j o i n t ⏟ 关节惩罚 − 0.01 ⏟ 步数惩罚 R = \underbrace{-1.0 \cdot (d_{left} + d_{right})}{距离塑形} + \underbrace{10.0 \cdot (\Delta d{left} + \Delta d_{right})}{进度奖励} - \underbrace{0.001 \cdot (||\dot{q}L||^2 + ||\dot{q}R||^2)}{速度惩罚} - \underbrace{0.01 \cdot ||\delta a||}{平滑惩罚} - \underbrace{20.0 \cdot \mathbb{1}{collision}}{碰撞惩罚} - \underbrace{P{joint}}{关节惩罚} - \underbrace{0.01}{步数惩罚} R=距离塑形 −1.0⋅(dleft+dright)+进度奖励 10.0⋅(Δdleft+Δdright)−速度惩罚 0.001⋅(∣∣q˙L∣∣2+∣∣q˙R∣∣2)−平滑惩罚 0.01⋅∣∣δa∣∣−碰撞惩罚 20.0⋅1collision−关节惩罚 Pjoint−步数惩罚 0.01
| 奖励项 | 方向 | 公式 | 权重/说明 |
|---|---|---|---|
| 距离塑形 | - | -1.0 x (left_dist + right_dist) |
提供连续的梯度信号 |
| 进度奖励 | + | 10.0 x (prev_dist - curr_dist) |
鼓励每一步靠近目标 |
| 速度惩罚 | - | 0.001 x sum(vel^2) |
抑制机械臂剧烈运动 |
| 平滑惩罚 | - | `0.01 x | |
| 碰撞惩罚 | - | -20.0 立即终止 |
避障核心约束 |
| 关节限制惩罚 | - | 0.5 x overshoot |
防止超出关节范围 |
到达奖励
| 条件 | 奖励 | 终止 |
|---|---|---|
| 双臂都到达 | +200.0 |
是 |
| 仅左臂到达 | +50.0 |
否(继续) |
| 仅右臂到达 | +50.0 |
否(继续) |
| 碰撞 | -20.0 |
是 |
| 超时 (>=1500步) | -10.0 |
是 |
关键设计
| 参数 | 值 | 设计原因 |
|---|---|---|
max_episode_steps |
1500 | 双臂任务需要更长探索时间(15秒仿真) |
n_substeps |
5 | PD 控制器需要足够时间平滑响应 |
action_scale |
0.05 | 每步最大移动5%关节范围,确保运动平滑 |
goal_arrival_threshold |
0.02m | 对双臂学习型智能体更合理(单臂用0.005m) |
训练配置
| 参数 | 值 |
|---|---|
| 并行环境数 | 24 |
| 总训练步数 | 80,000,000 |
| n_steps | 4096 |
| batch_size | 256 |
| learning_rate | 1e-4 |
| ent_coef | 0.05 |
| 网络架构 (Actor) | 512, 256, 128 |
| 网络架构 (Critic) | 512, 512, 256 |
4. 代码结构
4.1 项目目录
mujoco-learning/
├── rl_panda_reach_target_high_profile.py # Reach Target 主入口(模块化)
├── rl_panda_obstacle_high_profile.py # Obstacle Avoidance 主入口(单体)
├── rl_dual_arm_obstacle.py # Dual Arm Obstacle 主入口(单体)
├── src/
│ ├── envs/
│ │ ├── panda_reach_env.py # PandaReachEnv 环境类
│ │ └── reward.py # ReachTargetReward 模块化奖励
│ └── training/
│ ├── config.py # EnvConfig / PPOConfig / TrainConfig
│ └── callbacks.py # Checkpoint + Eval + LR 回调
├── model/
│ └── franka_emika_panda/
│ ├── scene.xml # 基础场景(Reach Target 使用)
│ ├── scene_pos_with_obstacles.xml # 单臂避障场景(Obstacle 使用)
│ ├── scene_dual_arm_with_obstacles.xml # 双臂避障场景(Dual Arm 使用)
│ ├── panda.xml # 机器人本体(general actuator)
│ ├── panda_pos.xml # 机器人本体(position actuator)
│ ├── panda_dual_arm_pos.xml # 双臂机器人本体
│ └── assets/ # 网格和纹理文件
├── assets/model/
│ ├── rl_reach_target_checkpoint/ # Reach Target 训练好的模型
│ ├── rl_obstacle_avoidance_checkpoint/ # Obstacle Avoidance 训练好的模型
│ └── rl_dual_arm_checkpoint/ # Dual Arm 训练好的模型
└── requirements.txt4.2 Reach Target 模块关系
rl_panda_reach_target_high_profile.py (主入口)
├── src/envs/panda_reach_env.py [PandaReachEnv]
│ └── src/envs/reward.py [ReachTargetReward]
├── src/training/config.py [TrainConfig, EnvConfig, PPOConfig]
└── src/training/callbacks.py [create_callbacks]
├── stable_baselines3 CheckpointCallback
├── stable_baselines3 EvalCallback
└── LinearLRScheduleCallback (自定义)4.3 MuJoCo 模型层级
model/franka_emika_panda/
├── panda.xml # 机器人本体定义(general actuator)
├── panda_pos.xml # 机器人本体(position actuator, kp/kv)
├── panda_dual_arm_pos.xml # 双臂机器人本体
├── scene.xml # 基础场景 <- Reach Target 使用
├── scene_pos_with_obstacles.xml # 单臂+障碍球 <- Obstacle 使用
└── scene_dual_arm_with_obstacles.xml # 双臂+障碍球 <- Dual Arm 使用5. 关键实现详解
5.1 MuJoCo 仿真控制
python
# 位置控制:通过 PD 控制器驱动关节
# 在 panda_pos.xml 中定义:
# <position kp="800" kv="80" ctrlrange="-6.28 6.28" gear="1.0"/>
# 设置目标关节位置
self.data.ctrl[:7] = target_joint_positions
# 执行物理仿真
mujoco.mj_step(self.model, self.data)5.2 PPO 模型配置
python
model = PPO(
policy="MlpPolicy", # MLP 策略网络
env=env,
n_steps=2048, # 每次 rollout 步数
batch_size=256, # mini-batch 大小
n_epochs=10, # 每次 rollout 更新轮数
gamma=0.99, # 折扣因子
gae_lambda=0.95, # GAE lambda 参数
learning_rate=1e-4, # 学习率
ent_coef=0.01, # 熵系数(鼓励探索)
clip_range=0.2, # PPO clip 范围
max_grad_norm=0.5, # 梯度裁剪
normalize_advantage=True, # 优势函数归一化
device="cuda", # GPU 训练
)5.3 VecNormalize 归一化
python
# 训练时:同时归一化观测和奖励
env = VecNormalize(env, norm_obs=True, norm_reward=True, clip_reward=10.0)
# 测试时必须加载训练时的统计信息
eval_env = VecNormalize.load(vec_normalize_path, eval_env)
eval_env.training = False # 冻结统计更新
eval_env.norm_reward = False # 不归一化奖励
# 测试时手动归一化观测
obs = eval_env.normalize_obs(obs)5.4 碰撞检测
python
def _check_collision(self) -> bool:
for i in range(self.data.ncon):
contact = self.data.contact[i]
body1 = self.model.geom_bodyid[contact.geom1]
body2 = self.model.geom_bodyid[contact.geom2]
# 排除自碰撞(同一 body)和地面碰撞(body=0)
if body1 != body2 and body1 != 0 and body2 != 0:
return True
return False6. 配置参数与调优指南
6.1 环境配置
| 参数 | Reach Target | Obstacle | Dual Arm | 调优建议 |
|---|---|---|---|---|
goal_threshold |
0.005 | 0.005 | 0.02 | 越大越易成功但精度降低 |
max_episode_steps |
500 | 500 | 1500 | 增大提高探索空间但减慢训练 |
n_substeps |
5 | 1 | 5 | 增大提高仿真精度但增加计算量 |
action_type |
delta | absolute | delta | delta 更平滑,absolute 更快 |
action_scale |
0.1 | N/A | 0.05 | 越小越平滑但到达越慢 |
curriculum |
True | 否 | 否 | 推荐开启,显著提升收敛速度 |
6.2 PPO 配置
| 参数 | Reach Target | Obstacle | Dual Arm | 调优建议 |
|---|---|---|---|---|
n_envs |
24 | 24 | 24 | 设为 CPU 核数 |
total_timesteps |
100M | 60M | 80M | 任务越复杂需要越多 |
n_steps |
2048 | 2048 | 4096 | 长回合任务需要更多步骤 |
learning_rate |
3e-4 | 3e-4 | 1e-4 | 复杂任务降学习率更稳定 |
ent_coef |
0.01 | 0.02 | 0.05 | 更大 -> 更多探索 |
batch_size |
256 | 256 | 256 | n_steps x n_envs / 8 左右 |
net_arch_pi |
256,256,128 | 256,256,128 | 512,256,128 | 任务越复杂网络越大 |
net_arch_vf |
512,256,128 | 512,256,128 | 512,512,256 | Critic 应比 Actor 深 |
6.3 VecNormalize 配置
python
# 训练时
env = VecNormalize(env, norm_obs=True, norm_reward=True, clip_reward=10.0)
# 评估时:加载训练统计,关闭更新
eval_env = VecNormalize.load(vec_normalize_path, eval_env)
eval_env.training = False # 冻结统计更新
eval_env.norm_reward = False # 不归一化奖励6.4 训练加速技巧
| 方法 | 效果 |
|---|---|
关闭 viewer (visualize=False) |
10-100x |
n_envs 调整为 CPU 核数 |
2-3x |
减少 n_substeps (如 5->3) |
1.5x(降低物理精度) |
减小 max_episode_steps |
2x(减少无效探索) |
7. 运行步骤
7.1 环境安装
bash
# 克隆仓库
git clone https://github.com/fatu08/mujoco-learning.git
cd mujoco-learning
# 创建 conda 环境
conda create -n arm_mujoco_env python=3.11
conda activate arm_mujoco_env
# 安装核心依赖
pip install numpy mujoco gymnasium stable-baselines3 torch tensorboard
# 或从 requirements.txt 安装
pip install -r requirements.txt7.2 Reach Target 任务
bash
cd /home/fatu08/mujoco-learning
# 训练新模型
python3 rl_panda_reach_target_high_profile.py
# 修改 TRAIN_MODE = True
# 测试已有模型
# 修改 TRAIN_MODE = False,设置正确的 model_path
# 监控训练进度
tensorboard --logdir=./tensorboard/panda_reach_target_v3/7.3 Obstacle Avoidance 任务
bash
cd /home/fatu08/mujoco-learning
# 训练新模型
python3 rl_panda_obstacle_high_profile.py
# TRAIN_MODE = True
# 测试已有模型
# TRAIN_MODE = False,设置正确的 MODEL_PATH
# 监控训练进度
tensorboard --logdir=./tensorboard/panda_obstacle_avoidance/7.4 Dual Arm Obstacle 任务
bash
cd /home/fatu08/mujoco-learning
# 训练
python rl_dual_arm_obstacle.py
# 修改 TRAIN_MODE = True
# 测试(会弹出 MuJoCo Viewer 3D 可视化窗口)
# 修改 TRAIN_MODE = False
python rl_dual_arm_obstacle.py7.5 预训练模型路径
| 任务 | 模型路径 |
|---|---|
| Reach Target | assets/model/rl_reach_target_checkpoint/panda_ppo_reach_target_v2 |
| Obstacle Avoidance | assets/model/rl_obstacle_avoidance_checkpoint/panda_obstacle_avoidance_v6 |
| Dual Arm | assets/model/rl_dual_arm_checkpoint/dual_arm_obstacle_v1 |
7.6 恢复训练
python
# Reach Target
config.resume_from = "panda_ppo_reach_target_v3"
# Obstacle
train_ppo(
n_envs=24,
total_timesteps=30_000_000,
model_save_path="...",
visualize=False,
resume_from="assets/model/.../panda_obstacle_avoidance_v5"
)
# Dual Arm
train_ppo(resume_from="assets/model/rl_dual_arm_checkpoint/dual_arm_obstacle_v1")程序会自动检查 {resume_from}_vecnormalize.pkl 并加载归一化统计。
7.7 GPU 训练确认
python
# 自动检测 CUDA
device = "cuda" if torch.cuda.is_available() else "cpu"
# 手动指定
device = "cuda:0" # 第一个 GPU验证 GPU 正在使用:
bash
watch -n 0.5 nvidia-smi
# 应看到 python 进程占用 GPU 显存8. 三文件对比分析
8.1 架构对比
| 维度 | Reach Target | Obstacle Avoidance | Dual Arm |
|---|---|---|---|
| 文件数 | 5+(主脚本 + 4 模块) | 1(单体文件) | 1 |
| 环境类 | src/envs/panda_reach_env.py |
内联定义,197 行 | 内联定义 |
| 奖励类 | src/envs/reward.py (117行) |
内联 _calc_reward() |
内联 _calc_reward() |
| 配置 | TrainConfig/EnvConfig/PPOConfig dataclass |
函数参数 + 内联字典 | 函数参数 + 内联字典 |
| Callbacks | EvalCallback + CheckpointCallback + 自定义 LR | 无 | 无 |
| 模型缓存 | 类变量 _cached_model 共享 |
每个实例独立加载 | 每个实例独立加载 |
8.2 功能对比
| 功能 | Reach Target | Obstacle Avoidance | Dual Arm |
|---|---|---|---|
| Delta 增量控制 | 是 | 否 | 是 |
| 课程学习 (6级) | 是 | 否 | 否 |
| 域随机化 (阻尼) | 是 | 否 | 否 |
| eval 独立进程 | 是 | 否 | 否 |
| 自动 checkpoint | 是 | 否 | 否 |
| 线性 LR 衰减 | 是 | 否 | 否 |
| 最佳模型自动保存 | 是 | 否 | 否 |
| VecNormalize | 是 | 是 | 是 |
| 碰撞检测排除自碰撞 | 是 | 是 | 是 |
| ee->目标向量 | 是 | 是 | 是 |
| ee->障碍物向量 | 不适用 | 是 | 是 |
| 障碍物距离 | 不适用 | 是 | 是 |
| Viewer 节流 | 是 (每5步) | 是 (每5步) | 是 (每5步) |
| terminate/truncate 正确使用 | 是 | 是 | 是 |
8.3 奖励函数对比
| 奖励项 | Reach Target | Obstacle Avoidance | Dual Arm |
|---|---|---|---|
| 距离塑形 | 是 1/(1+d) |
是 分段函数 | 是 -1.0 x d |
| 进度奖励 | 否 | 否 | 是 10.0 x Delta_d |
| 速度惩罚 | 否 | 否 | 是 0.001 x sum(vel^2) |
| 直线度奖励 | 是 3.0/(1+e) |
否 | 否 |
| 偏离惩罚 | 是 | 否 | 否 |
| 姿态惩罚 | 是 | 否 | 否 |
| 动作平滑 | 是 `0.1 x | delta_a | |
| 碰撞惩罚 | 是 1.0/contact |
是 -10.0 x 2 |
是 -20.0 x 2 |
| 关节限制 | 是 0.5 x err |
是 0.5 x err |
是 0.5 x err |
| 步数/时间惩罚 | 否 | 是 0.001 x steps |
是 0.01 |
8.4 终止条件对比
| 条件 | Reach Target | Obstacle Avoidance | Dual Arm |
|---|---|---|---|
| 到达阈值 | 0.005m | 0.005m | 0.02m |
| 最大步数 | 500 | 500 | 1500 |
| 碰撞终止 | 继续(仅惩罚) | 是 | 是 |
| 到达奖励 | +50.0 | +50.0 | +200.0 |
| 部分到达奖励 | N/A | N/A | +50.0 (单臂) |
| 超时惩罚 | -5.0 | -5.0 | -10.0 |
9. 常见问题与解决方案
Q1: 训练时出现大量 Gymnasium 兼容层警告
UserWarning: You provided an OpenAI Gym environment.原因: Stable-Baselines3 检测到旧版 Gym API
解决 : 已修复。导入改为 import gymnasium as gym,并添加 warnings.filterwarnings。
Q2: net_arch 格式警告
UserWarning: As shared layers in the mlp_extractor are removed since SB3 v1.8.0解决 : 将 net_arch=[dict(...)] 改为 net_arch=dict(...)。
Q3: ent_coef="auto" 导致训练异常
原因 : SB3 的 PPO 不支持 "auto" 熵系数(SAC 才支持),字符串会被当作 0.0。策略过早收敛到次优解。
解决 : 使用数值,如 ent_coef=0.01。
Q4: _cached_model_path AttributeError
原因 : 类变量只定义了 _cached_model,未定义 _cached_model_path。
解决: 在类级别同时定义两个变量:
python
class PandaReachEnv(gym.Env):
_cached_model = None
_cached_model_path = NoneQ5: n_envs=64 在 20 核 CPU 上性能下降
原因: 进程数远超 CPU 核心数,大量上下文切换。
解决 : n_envs = CPU 核心数 或略高(如 24)。
Q6: Viewer 测试时运行多轮后卡住
原因 : _render_scene() 多次累积导致 MuJoCo viewer 内部状态不一致。
解决 : 直接设 ngeom=1,不先置零;sync() 前先 _render_scene(),添加 step counter 节流。
Q7: 碰撞惩罚误判自碰撞
原因 : self.data.ncon 包含机器人自身关节之间的正常接触。
解决 : 遍历 contact 数组,检查 geom_bodyid:
python
if body1 != body2 and body1 != 0 and body2 != 0: # 排除自碰撞和地面Q8: 测试时成功率远低于训练时的 EvalCallback
原因 : 测试时没有加载 VecNormalize 统计,策略网络收到的是未归一化的原始观测(尺度完全不对)。
解决 : 测试时加载 _vecnormalize.pkl,用 eval_env.normalize_obs(obs) 归一化观测。
Q9: mj_step vs mj_forward 混淆
| 函数 | 作用 | 使用场景 |
|---|---|---|
mj_step |
完整物理步进 | step() 中执行仿真 |
mj_forward |
只更新运动学 / 碰撞检测 | reset() 中初始化、修改物体位置后同步 |
Q10: terminated vs truncated 的区别
| 信号 | 含义 | 对 Value Function 的影响 |
|---|---|---|
terminated=True |
episode 自然结束(到达目标/碰撞) | V(s_terminal) = 0 |
truncated=True |
episode 被截断(超时/超步数) | Bootstrap 估计 V(s_truncated) |
正确使用 : 到达目标 -> terminated=True;步数超限 -> truncated=True。混淆会导致 Critic 学习错误的价值估计。
Q11: NumPy / SciPy 版本警告
A NumPy version >=1.22.4 and <2.3.0 is required for this version of SciPy解决: 降级 NumPy(不影响运行):
bash
pip install "numpy>=1.22.4,<2.3.0"Q12: 如何加速训练?
| 方法 | 效果 |
|---|---|
关闭 viewer (visualize=False) |
10-100x |
n_envs 调整为 CPU 核数 |
2-3x |
减少 n_substeps (如 5->3) |
1.5x(降低物理精度) |
减小 max_episode_steps |
2x(减少无效探索) |
使用 GPU (device="cuda") |
GPU 利用率低,加速有限(MLP 模型小) |
贡献
欢迎贡献代码、提交 Issue 或参与讨论!
参考项目
- MuJoCo -- 物理引擎
- Stable-Baselines3 -- PPO 实现
- Gymnasium -- 强化学习接口
- Franka Emika Panda 模型 -- MuJoCo Menagerie
致谢
- Google DeepMind 的 MuJoCo Menagerie 提供 Franka Panda 模型
- Stable-Baselines3 团队提供优秀的 RL 算法实现
- 开源项目:https://github.com/LitchiCheng/mujoco-learning