
🎬 渡水无言 :个人主页渡水无言
❄专栏传送门 : 《linux专栏》《嵌入式linux驱动开发》《linux系统移植专栏》
❄专栏传送门 : 《freertos专栏》 《STM32 HAL库专栏》《linux裸机开发专栏》
❄专栏传送门 :《产品测评专栏》 《Ai智能体专栏) 《ROS开发专栏》
❄专栏传送门 :《BMS专栏》
⭐️流水不争先,争的是滔滔不绝
📚博主简介:第二十届中国研究生电子设计竞赛全国二等奖 |国家奖学金 | 省级三好学生
| 省级优秀毕业生获得者 | csdn新星杯TOP1 | 半导纵横专栏博主 | 211在读研究生
在这里主要分享自己学习的linux嵌入式领域知识;有分享错误或者不足的地方欢迎大佬指导,也欢迎各位大佬互相三连

目录
[2.1、SLAM 环境建图](#2.1、SLAM 环境建图)
[三、新建综合应用功能包 home_pkg](#三、新建综合应用功能包 home_pkg)
[6.1、编写 CMakeLists.txt](#6.1、编写 CMakeLists.txt)
[6.2、编写 package.xml](#6.2、编写 package.xml)
前言
经过前面博客的学习,我们已经逐一掌握了 ROS2 基础、Linux 操作、激光雷达、IMU、SLAM 建图、NAV2 自主导航、三维视觉检测、机械臂控制与物品抓取等模块化知识点。
本期博客将整合所有前置功能 ,基于 ROS2 分布式节点设计思想,实现一个家庭服务机器人的综合项目,具体实现的效果为:自主导航→厨房抓取饮料→再次导航→送达客人。
一、实验原理流程
1.1、整体流程
本程序通过多节点协同,实现机器人从客厅到厨房取物、再送至餐厅客人处的完整饮料递送任务,核心流程如下:
初始导航:前往厨房
为机器人设定初始位置后,向 wp_map_tools 包的 wp_navi_server 节点发送厨房饮料位置的航点指令,激活航点导航功能,等待节点完成从客厅到厨房的第一阶段导航任务。
物品抓取:获取饮料
收到 wp_navi_server 节点的导航完成信号后,向 wpr_simulation2 包的 grab_object_sim 节点发送 start grab指令,激活物品抓取功能,等待节点完成饮料抓取任务。
二次导航:前往餐厅
收到grab_object_sim节点的抓取完成信号后,再次向 wp_navi_server 节点发送餐厅客人位置的航点指令,激活航点导航功能,等待节点完成从厨房到餐厅的第二阶段导航任务。
任务完成:递送饮料
收到 wp_navi_server 节点的导航完成信号,确认机器人已将饮料送至餐厅客人处,饮料递送全流程结束。
采用状态机拆分任务逻辑,逻辑清晰、易于扩展维护:
| 状态宏定义 | 状态说明 |
|---|---|
| STEP_WAIT | 初始等待状态,下发厨房航点导航指令,跳转至去往厨房状态 |
| STEP_GOTO_KITCHEN | 等待导航到达厨房,完成后启动物品抓取,跳转至抓取状态 |
| STEP_GRAB_DRINK | 等待饮料抓取完成,下发客人航点指令,跳转至去往餐厅状态 |
| STEP_GOTO_GUEST | 等待导航到达客人位置,完成后进入结束状态 |
| STEP_DONE | 饮料递送任务全部完成,机器人保持静止 |
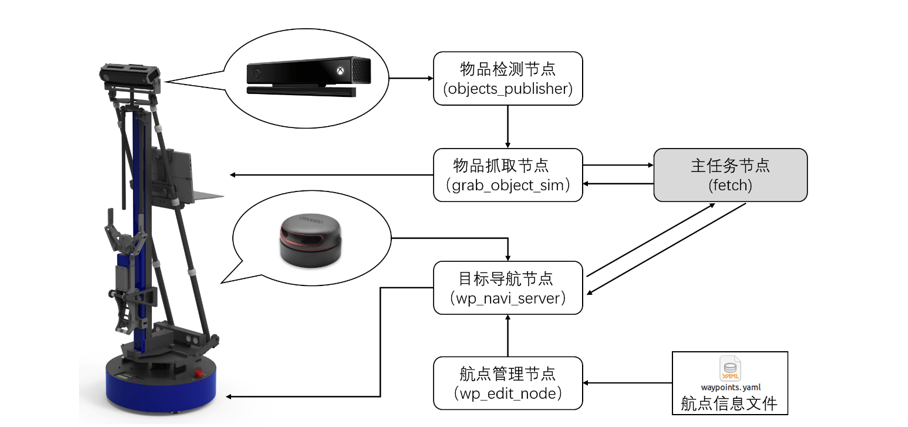
1.2、系统架构与节点话题通信逻辑
1. 核心功能节点
主任务节点fetch_node:全局状态机调度,下发导航、抓取控制指令;
航点导航节点wp_navi_server:接收航点名称,完成自主导航并反馈导航结果;
物品检测节点objects_publisher:基于三维点云识别桌面饮料位置;
物品抓取节点grab_object_sim:接收指令完成机械臂抓取,反馈抓取完成信号;
航点编辑节点wp_edit_node:用于在 RViz 中手动添加、保存导航航点;
NAV2 导航框架:负责地图加载、路径规划、避障运动控制。
2. 关键通信话题
/waterplus/navi_waypoint:下发航点名称,控制机器人前往指定点位;
/waterplus/navi_result:导航结果反馈,navi done表示到达目标;
/wpb_home/behavior:下发行为控制指令,如start grab启动物品抓取;
/wpb_home/grab_result:抓取结果反馈,grab done表示抓取完成。
二、实验环境数据采集
2.1、SLAM 环境建图
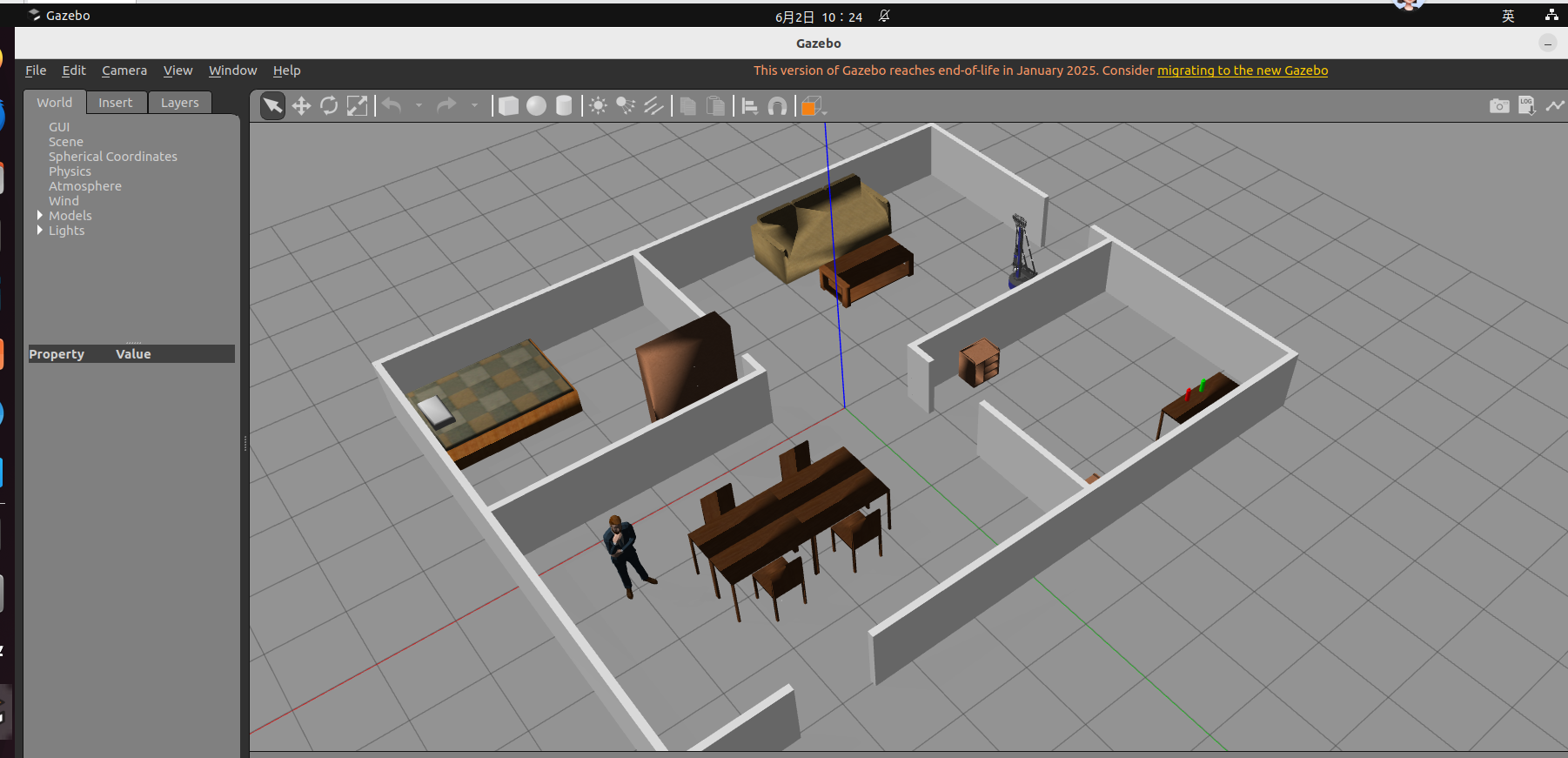
1、启动仿真 SLAM 建图环境
启动仿真 SLAM 建图环境,打开终端,输入以下指令:
cpp
source install/setup.bash
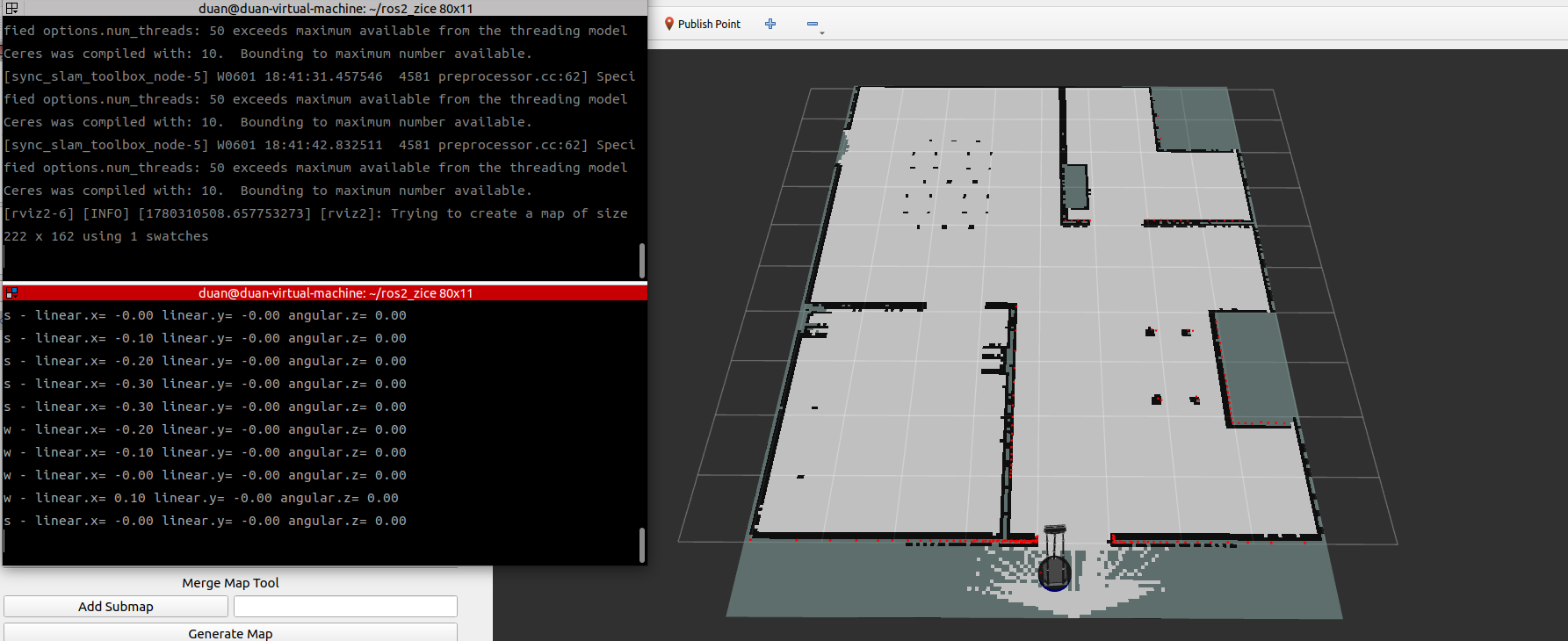
ros2 launch wpr_simulation2 slam.launch.py2、新开终端,键盘控制机器人巡游建图
新开终端,输入以下指令:
cpp
source install/setup.bash
ros2 run wpr_simulation2 keyboard_vel_cmd用键盘控制机器人在场景里巡游一遍之后,可以看到建好的地图。如下图所示:
保持Terminator终端的第二个窗口标题为红色。按下键盘的X键,会退出键盘控制程序。然后执行如下指令保存地图到文件:
cpp
ros2 run nav2_map_server map_saver_cli -f map这样会在终端窗口的当前路径下创建两个地图文件:map.pgm和map.yaml。将这两个文件拷贝到wpr_simulation2的maps文件夹下,一会从这个文件夹加载地图文件。
2.2、导航航点设置
1、启动航点编辑环境
注意:我们先要下载wp_map_tools,这个我们之前下载了。
然后我们要先编译他,打开终端,输入以下指令:
cpp
colcon build --packages-select wp_map_tools
source install/setup.bash再运行航点打开终端,输入以下指令:
cpp
source install/setup.bash
ros2 launch wp_map_tools add_waypoint_sim.launch.py在RViz2工具栏的右边,单击Add Waypoint按钮,就可以在地图上添加航点。

第一个航点在厨房的饮料桌子前,距离桌子1米(对应地面上一个格子的距离);第二个航点,在厨房的客人面前,距离客人1米(对应地面上的一个格子的距离)。
2、保存航点生成配置文件
新开一个终端,输入以下指令:
cpp
source ~/ros2_zice/install/setup.bash
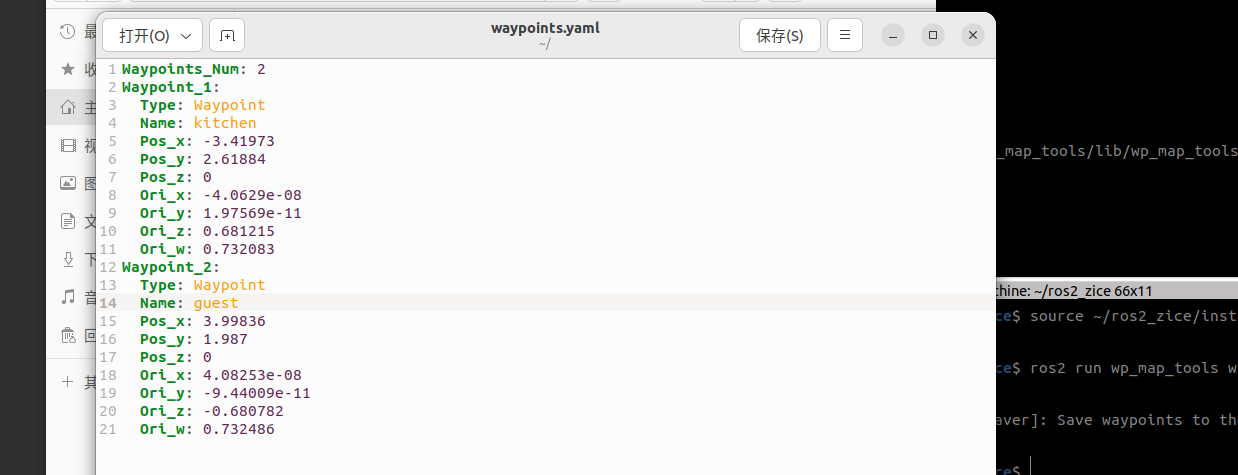
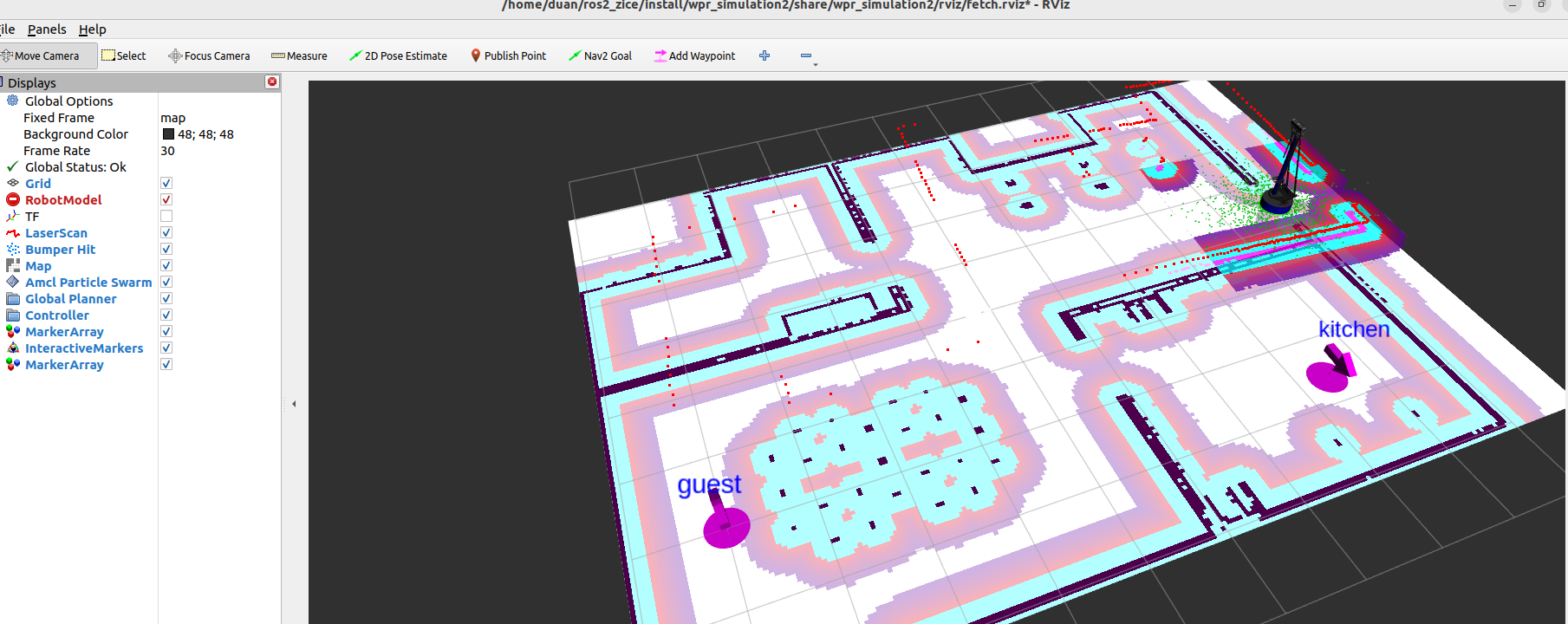
ros2 run wp_map_tools wp_saver执行完毕后,在主文件夹下会生成一个名为"waypoints.yaml"的文件。双击打开这个文件对它的内容进行编辑,修改其中的航点名称:
把Waypoint_1的Name,从"1"修改为"kitchen",这是抓取饮料的位置。
把Waypoint_2的Name,从"2"修改为"guest",这是最终递送饮料给客人的位置。如下图所示:
三、新建综合应用功能包 home_pkg
在工作空间src目录下创建专用综合应用功能包:
cpp
cd ~/ros2_zice/src
ros2 pkg create home_pkg四、编写Launch文件
在home_pkg/launch新建home.launch.py,统一启动仿真、导航、航点服务、视觉抓取、RViz 等所有节点,全部代码如下所示:
cpp
import os
from launch import LaunchDescription
from launch_ros.actions import Node
from ament_index_python.packages import get_package_share_directory
from launch.actions import IncludeLaunchDescription
from launch.launch_description_sources import PythonLaunchDescriptionSource
def generate_launch_description():
launch_file_dir = os.path.join(get_package_share_directory('wpr_simulation2'), 'launch')
home_mani_cmd = IncludeLaunchDescription(
PythonLaunchDescriptionSource(
os.path.join(launch_file_dir, 'robocup_home_mani.launch.py')
)
)
map_file = os.path.join(
get_package_share_directory('wpr_simulation2'),
'maps',
'map.yaml'
)
nav_param_file = os.path.join(
get_package_share_directory('wpr_simulation2'),
'config',
'nav2_params.yaml'
)
nav2_launch_dir = os.path.join(
get_package_share_directory('nav2_bringup'),
'launch'
)
navigation_cmd = IncludeLaunchDescription(
PythonLaunchDescriptionSource([nav2_launch_dir, '/bringup_launch.py']),
launch_arguments={
'map': map_file,
'use_sim_time': "True",
'params_file': nav_param_file}.items(),
)
wp_edit_cmd = Node(
package='wp_map_tools',
executable='wp_edit_node',
name='wp_edit_node'
)
wp_navi_server_cmd = Node(
package='wp_map_tools',
executable='wp_navi_server',
name='wp_navi_server'
)
objects_publisher_cmd = Node(
package='wpr_simulation2',
executable='objects_publisher',
name='objects_publisher',
parameters=[
{"auto_start": False}
]
)
grab_object_cmd = Node(
package='wpr_simulation2',
executable='grab_object_sim',
name='grab_object_sim'
)
rviz_file = os.path.join(get_package_share_directory('wpr_simulation2'), 'rviz', 'fetch.rviz')
rviz_cmd = Node(
package='rviz2',
executable='rviz2',
name='rviz2',
arguments=['-d', rviz_file]
)
ld = LaunchDescription()
ld.add_action(home_mani_cmd)
ld.add_action(navigation_cmd)
ld.add_action(wp_edit_cmd)
ld.add_action(wp_navi_server_cmd)
ld.add_action(objects_publisher_cmd)
ld.add_action(grab_object_cmd)
ld.add_action(rviz_cmd)
return ld五、编写主任务状态机节点代码
在home_pkg/src新建fetch.cpp,基于有限状态机实现全流程任务调度,代码如下:
cpp
#include <rclcpp/rclcpp.hpp>
#include <std_msgs/msg/string.hpp>
#define STEP_WAIT 0
#define STEP_GOTO_KITCHEN 1
#define STEP_GRAB_DRINK 2
#define STEP_GOTO_GUEST 3
#define STEP_DONE 4
static int fetch_step = STEP_WAIT;
std::shared_ptr<rclcpp::Node> node;
rclcpp::Publisher<std_msgs::msg::String>::SharedPtr navi_pub;
rclcpp::Publisher<std_msgs::msg::String>::SharedPtr behavior_pub;
// 导航结果回调
void NaviResultCallback(const std_msgs::msg::String::SharedPtr msg)
{
RCLCPP_INFO(node->get_logger(), "导航结果: %s",msg->data.c_str());
if(fetch_step == STEP_GOTO_KITCHEN && msg->data == "navi done")
{
std_msgs::msg::String cmd;
cmd.data = "start grab";
behavior_pub->publish(cmd);
fetch_step = STEP_GRAB_DRINK;
RCLCPP_INFO(node->get_logger(), "已到达厨房,启动饮料抓取");
}
if(fetch_step == STEP_GOTO_GUEST && msg->data == "navi done")
{
fetch_step = STEP_DONE;
RCLCPP_INFO(node->get_logger(), "已送达客人位置,饮料递送任务完成!");
}
}
// 抓取结果回调
void GrabResultCallback(const std_msgs::msg::String::SharedPtr msg)
{
RCLCPP_INFO(node->get_logger(), "抓取结果: %s",msg->data.c_str());
if(fetch_step == STEP_GRAB_DRINK && msg->data == "grab done")
{
std_msgs::msg::String cmd;
cmd.data = "guest";
navi_pub->publish(cmd);
fetch_step = STEP_GOTO_GUEST;
RCLCPP_INFO(node->get_logger(), "饮料抓取完成,前往客人位置");
}
}
int main(int argc, char** argv)
{
rclcpp::init(argc, argv);
node = std::make_shared<rclcpp::Node>("fetch_node");
// 发布器初始化
navi_pub = node->create_publisher<std_msgs::msg::String>(
"/waterplus/navi_waypoint", 10);
behavior_pub = node->create_publisher<std_msgs::msg::String>(
"/wpb_home/behavior", 10);
// 订阅导航与抓取结果
auto navi_result_sub = node->create_subscription<std_msgs::msg::String>(
"/waterplus/navi_result", 10, NaviResultCallback);
auto grab_result_sub = node->create_subscription<std_msgs::msg::String>(
"/wpb_home/grab_result", 10, GrabResultCallback);
rclcpp::sleep_for(std::chrono::milliseconds(1000));
rclcpp::Rate loop_rate(30);
while(rclcpp::ok())
{
if(fetch_step == STEP_WAIT)
{
std_msgs::msg::String cmd;
cmd.data = "kitchen";
navi_pub->publish(cmd);
fetch_step = STEP_GOTO_KITCHEN;
RCLCPP_INFO(node->get_logger(), "任务启动,前往厨房");
}
rclcpp::spin_some(node);
loop_rate.sleep();
}
rclcpp::shutdown();
return 0;
}六、功能包编译配置
6.1、编写 CMakeLists.txt
用于告诉编译器如何编译 C++ 代码、把文件安装到哪里,代码如下所示:
cpp
cmake_minimum_required(VERSION 3.8)
project(home_pkg)
if(CMAKE_COMPILER_IS_GNUCXX OR CMAKE_CXX_COMPILER_ID MATCHES "Clang")
add_compile_options(-Wall -Wextra -Wpedantic)
endif()
find_package(ament_cmake REQUIRED)
find_package(rclcpp REQUIRED)
find_package(std_msgs REQUIRED)
add_executable(fetch src/fetch.cpp)
ament_target_dependencies(fetch rclcpp std_msgs)
install(TARGETS fetch
DESTINATION lib/${PROJECT_NAME}
)
# 这一行就是关键!把 launch 目录安装到 share 里
install(DIRECTORY launch
DESTINATION share/${PROJECT_NAME}
)
ament_package()6.2、编写 package.xml
声明包名、作者、依赖库
cpp
<?xml version="1.0"?>
<package format="3">
<name>home_pkg</name>
<version>0.0.0</version>
<description>家庭服务机器人综合任务包:导航+视觉+抓取</description>
<maintainer email="user@todo.com">user</maintainer>
<license>Apache-2.0</license>
<buildtool_depend>ament_cmake</buildtool_depend>
<depend>rclcpp</depend>
<depend>std_msgs</depend>
</package>七、编译与运行
7.1、编译
cpp
cd ~/ros2_zice
colcon build --packages-select wpr_simulation2 wp_map_tools home_pkg
source install/setup.bash7.2、运行服务机器人程序
打开终端,输入以下指令:
cpp
source install/setup.bash
ros2 launch home_pkg home.launch.py如下图所示:
在RViz2窗口中还没有显示机器人模型,需要手动设置一下机器人的初始位置。如图所示,单击一下RViz2的工具栏里的2D Pos Estimate按钮,如下图所示:

7.3、启动自动递送任务
新开终端,输入以下指令:
cpp
source install/setup.bash
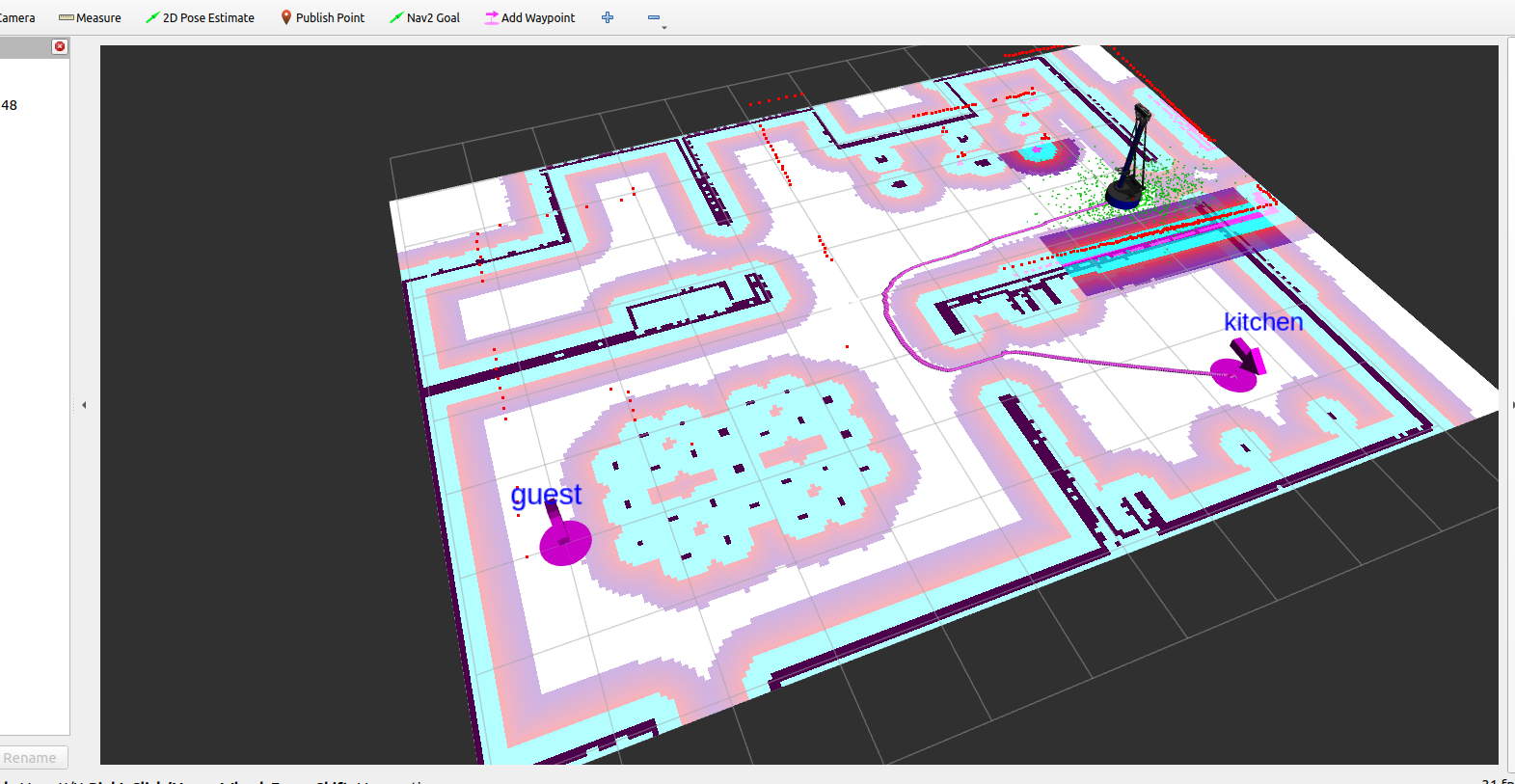
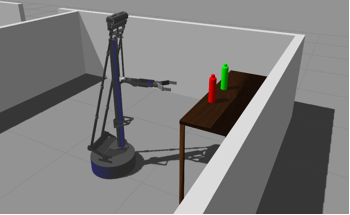
ros2 run home_pkg fetch节点执行之后,机器人会自动启动第一阶段的导航,去往航点"kitchen";机器人到达"kitchen"航点后,会对桌面上的饮料进行抓取。抓取完成后,机器人会带着饮料,导航去往航点"guest";机器人到达航点"guest",饮料递送任务完成。 如下图所示:

总结
本期博客整合所有前置功能 ,基于 ROS2 分布式节点设计思想,实现了一个家庭服务机器人的综合项目,具体实现的效果为:自主导航→厨房抓取饮料→再次导航→送达客人。