机器人控制总线深度解析:CAN与EtherCAT,谁在决定机器人的稳定性?
引言:机器人的"神经系统"有多重要?
你有没有见过这样的机器人:演示时动作行云流水,一到真实场景就摇摇晃晃,稍微快一点就摔倒?很多人会把问题归咎于"控制算法不行",但实际上,80%的机器人稳定性问题,根源都在通信总线。
机器人看起来像一个整体在运动,但从工程视角看,它更像一张分布式网络:大脑(主控)发出命令,通过"神经"(总线)传到全身的"肌肉"(驱动器),同时"神经末梢"(传感器)把状态反馈回大脑。如果"神经"反应慢、信号乱、不同步,再聪明的大脑也指挥不好身体。
在工业和高性能机器人中,最主流的两条"神经干线"就是CAN总线 和EtherCAT总线。一个是久经考验的"老大哥",一个是后来居上的"实力派"。今天我们就从"命令如何从大脑传到指尖"开始,彻底搞懂这两种总线的原理、差异和选型逻辑。
一、从"大脑"到"肌肉":机器人命令的五层旅程
以一个6轴机械臂为例,当你告诉它"去抓那个杯子",这个命令会经过五层处理,最终变成每个电机的电流信号:

图1 机器人控制系统五层架构图
| 层级 | 名称 | 输入 | 输出 | 典型频率 | 特点 | 通俗解释 |
|---|---|---|---|---|---|---|
| L1 | 任务与决策层 | 用户指令、视觉数据、地图 | 动作意图(如"末端到(1,2,3)") | 10-50 Hz | 非实时,允许延迟 | 公司CEO,只说"做什么" |
| L2 | 运动规划与轨迹层 | 动作意图 | 每关节轨迹(位置/速度/加速度) | 50-200 Hz | 软实时 | 部门经理,分解任务成步骤 |
| L3 | 伺服控制层 | 关节轨迹 | 电机控制命令(位置/速度/力矩) | 1000 Hz+ | 强实时,低抖动 | 小组长,精确到每个动作 |
| L4 | 通信总线层 | 控制命令 | 总线数据帧 | 与伺服层同步 | 决定确定性 | 传令兵,负责传递命令和反馈 |
| L5 | 执行器与传感器层 | 总线数据帧 | 电机力矩、传感器数据 | 与总线同步 | 物理层 | 一线员工,实际执行任务 |
总线(CAN/EtherCAT)就工作在L4层。它不决定你用PID还是MPC算法,但它决定了你的算法能不能"准时且同步"地执行。如果总线延迟太大、抖动太厉害,再先进的算法也会变成"纸上谈兵"。
二、评价控制总线的三个黄金指标
很多人以为"带宽越高的总线越好",但在控制领域,确定性(Determinism)比带宽重要100倍。评价一条控制总线的好坏,只看三个指标:
2.1 延迟(Latency)
定义 :从主控发出命令到驱动器收到命令的时间。
Latency=t收到−t发出 \text{Latency} = t_{\text{收到}} - t_{\text{发出}} Latency=t收到−t发出
其中:
- t发出t_{\text{发出}}t发出:主控将命令放入总线发送缓冲区的时间
- t收到t_{\text{收到}}t收到:驱动器收到完整命令帧的时间
通俗解释:就像你发微信给朋友,延迟就是从你按下发送到朋友收到消息的时间。
2.2 抖动(Jitter)
定义 :延迟的波动范围。这是控制总线最致命的指标。
Jitter=max(Latency)−min(Latency) \text{Jitter} = \max(\text{Latency}) - \min(\text{Latency}) Jitter=max(Latency)−min(Latency)
其中:
- max(Latency)\max(\text{Latency})max(Latency):统计周期内的最大延迟
- min(Latency)\min(\text{Latency})min(Latency):统计周期内的最小延迟
为什么抖动比延迟更可怕?
想象一下你在开车:如果方向盘总是固定延迟1秒才响应,你很快就能适应;但如果方向盘有时候延迟0.1秒,有时候延迟1秒,你根本没法开,肯定会撞车。
机器人控制也是一样:1ms的固定延迟可以通过算法补偿,但100us的抖动会让控制器完全失控。
2.3 同步(Synchronization)
定义 :多个关节在"同一时刻"更新命令和回传状态的精度。
SyncError=∣t关节1更新−t关节2更新∣ \text{SyncError} = |t_{\text{关节1更新}} - t_{\text{关节2更新}}| SyncError=∣t关节1更新−t关节2更新∣
其中:
- t关节1更新t_{\text{关节1更新}}t关节1更新:关节1执行命令的时间
- t关节2更新t_{\text{关节2更新}}t关节2更新:关节2执行命令的时间
举个例子:人形机器人走路时,左腿和右腿必须精确同步抬起和落下。如果两条腿的命令更新时间差了10ms,机器人就会像喝醉了一样摇晃,甚至摔倒。
三、CAN总线:机器人界的"老黄牛"
CAN(Controller Area Network)总线诞生于1986年,由博世公司为汽车行业开发。凭借其极高的可靠性和低成本,它迅速成为工业控制领域的事实标准。
3.1 CAN的核心特性
- 多主架构:任何节点都可以主动发送消息,不需要主站调度
- 基于ID的仲裁机制:当多个节点同时发送消息时,ID越小(优先级越高)的消息会优先发送,低优先级消息自动等待
- 硬件级可靠性:内置错误检测、错误重发和故障节点自动隔离机制
- 差分信号传输:抗干扰能力极强,适合工业恶劣环境
CAN仲裁机制的通俗解释:就像一群人在一个房间里说话,规则是"声音小的先听声音大的说完"。当两个人同时说话时,声音大(优先级高)的人继续说,声音小(优先级低)的人自动闭嘴,等对方说完再说。
3.2 CAN在机器人中的典型用法
在机器人中,CAN总线的典型拓扑是总线型结构:所有驱动器、IO模块、传感器都并联在两根CAN线上。
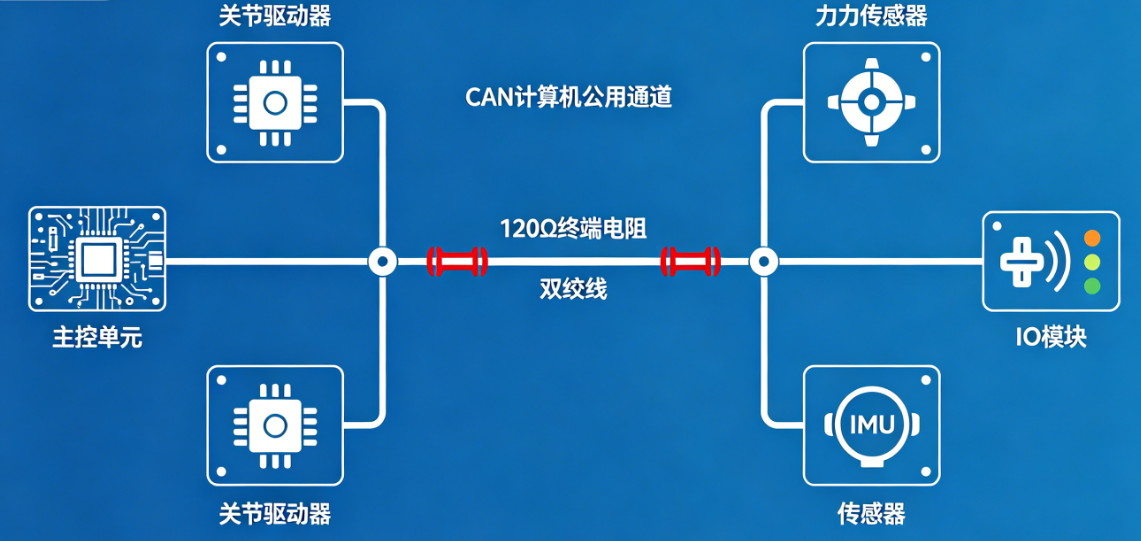
机器人CAN总线拓扑图
工作流程:
- 主控周期性(如10ms一次)广播所有关节的目标位置/速度/力矩
- 每个驱动器只接收自己ID对应的命令
- 驱动器周期性上报自己的位置、速度、电流、温度等状态
- 主控收集所有反馈,进行下一轮控制计算
3.3 CAN的工程限制
CAN虽然可靠,但它有三个无法突破的天生短板:
- 带宽天花板低:经典CAN最高带宽只有1Mbps,CAN FD虽然能到8Mbps,但生态远不如经典CAN成熟
- 仲裁带来时序不确定:高优先级消息会挤压低优先级消息,导致低优先级消息的延迟抖动很大
- 同步能力弱:没有原生的同步机制,需要额外设计同步帧和时间戳,同步精度通常只能做到毫秒级
工程经验:当关节数超过6个,或者控制频率超过500Hz时,CAN总线就会变得非常吃力。所以工业界一般把CAN的通信频率控制在125Hz以内。
3.4 核心代码:Linux下CAN总线收发示例
c
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <unistd.h>
#include <net/if.h>
#include <sys/ioctl.h>
#include <sys/socket.h>
#include <linux/can.h>
#include <linux/can/raw.h>
int main() {
int sockfd;
struct sockaddr_can addr;
struct ifreq ifr;
struct can_frame frame;
// 1. 创建CAN套接字
sockfd = socket(PF_CAN, SOCK_RAW, CAN_RAW);
if (sockfd < 0) {
perror("socket create failed");
return -1;
}
// 2. 指定CAN接口(can0)
strcpy(ifr.ifr_name, "can0");
ioctl(sockfd, SIOCGIFINDEX, &ifr);
// 3. 绑定套接字到CAN接口
addr.can_family = AF_CAN;
addr.can_ifindex = ifr.ifr_ifindex;
if (bind(sockfd, (struct sockaddr *)&addr, sizeof(addr)) < 0) {
perror("bind failed");
close(sockfd);
return -1;
}
printf("CAN总线初始化成功,准备发送命令...\n");
// 4. 发送关节1目标位置命令(ID=0x101)
frame.can_id = 0x101;
frame.can_dlc = 4; // 数据长度4字节
float target_pos = 1.5708; // 目标角度90度(弧度)
memcpy(frame.data, &target_pos, sizeof(float));
if (write(sockfd, &frame, sizeof(struct can_frame)) != sizeof(struct can_frame)) {
perror("write failed");
close(sockfd);
return -1;
}
printf("发送关节1目标位置: %.2f rad\n", target_pos);
// 5. 接收关节1反馈位置(ID=0x201)
while (1) {
if (read(sockfd, &frame, sizeof(struct can_frame)) > 0) {
if (frame.can_id == 0x201) {
float current_pos;
memcpy(¤t_pos, frame.data, sizeof(float));
printf("收到关节1当前位置: %.2f rad\n", current_pos);
break;
}
}
}
close(sockfd);
return 0;
}代码解释:
- 这是Linux系统下使用SocketCAN接口进行CAN总线通信的最简示例
- 发送帧ID=0x101的命令,包含关节1的目标位置
- 接收帧ID=0x201的反馈,包含关节1的当前位置
- 实际工程中需要加入超时重发、错误处理等机制
四、EtherCAT:为运动控制而生的"超级神经"
EtherCAT诞生于2003年,由德国倍福公司开发。它的设计目标非常明确:解决传统以太网在实时控制领域的所有问题。如今,它已经成为高端多关节机器人、数控机床、3D打印机的首选总线。
4.1 革命性的On-the-fly机制
传统以太网的工作方式是"存储-转发":每个设备收到完整的以太网帧后,先存到缓冲区,处理完再转发给下一个设备。这导致延迟和抖动都很大。
EtherCAT采用了革命性的On-the-fly(边转发边处理)机制:
- 主站发送一个以太网帧,依次经过所有从站
- 每个从站在帧经过时,直接在帧里读取自己的数据,同时把自己的反馈数据写入帧中
- 最后一个从站把帧发回主站,整个过程完成
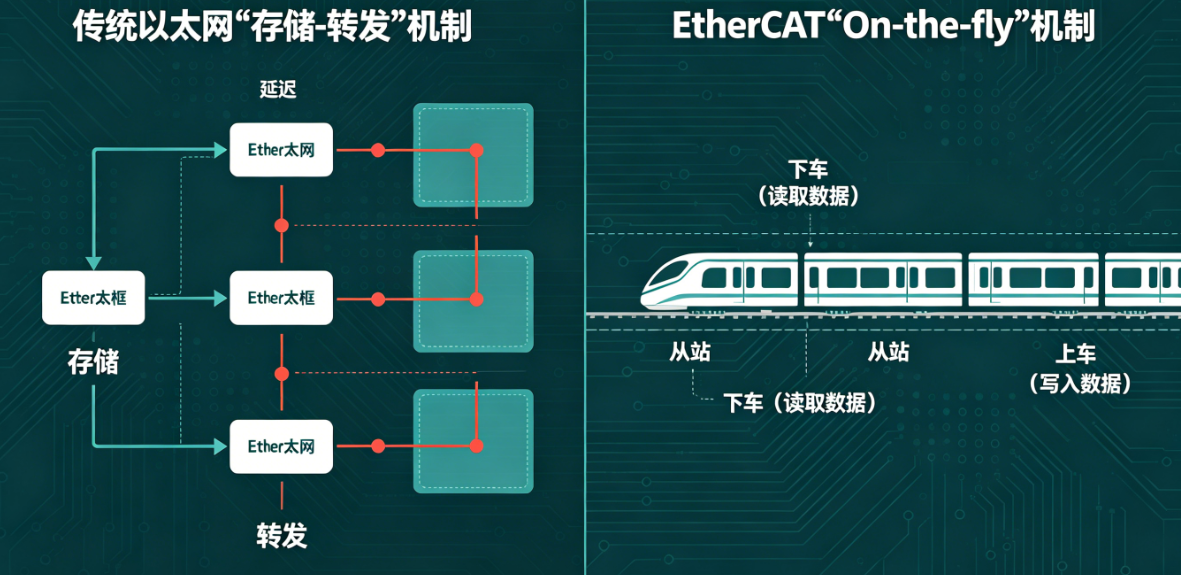
EtherCAT On-the-fly机制与传统以太网对比
这种机制的效率高得惊人:一个1500字节的以太网帧,可以在几十微秒内完成对32个从站的读写操作,带宽利用率接近100%。
4.2 主从架构与过程数据映射
EtherCAT采用严格的单主多从架构:整个网络只有一个主站负责调度,所有从站都听从主站的指挥。这非常适合运动控制系统的周期性调度需求。
EtherCAT的核心概念是过程数据对象(PDO):
- 主站和从站之间预先定义好数据交换的格式和位置
- 每个周期,主站和从站只需要按照约定的位置读写数据即可
- 不需要复杂的协议解析,效率极高
4.3 杀手锏:分布式时钟(DC)
EtherCAT最强大的功能是分布式时钟(Distributed Clocks, DC):
- 主站选择一个从站作为参考时钟
- 所有其他从站的时钟都自动与参考时钟对齐
- 同步精度可以达到1微秒以内
这就是为什么高端多关节机器人都用EtherCAT的原因:它能让几十个关节在同一时刻精确执行命令,误差不超过1微秒。
4.4 核心代码:基于SOEM的EtherCAT主站初始化示例
SOEM(Simple Open EtherCAT Master)是最流行的开源EtherCAT主站库。下面是一个最简单的初始化示例:
c
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <unistd.h>
#include "ethercat.h"
#define EC_TIMEOUTMON 500
char IOmap[4096];
int expectedWKC;
boolean needlf;
volatile int wkc;
boolean inOP;
uint8 currentgroup = 0;
int main(int argc, char *argv[]) {
int i, j, oloop, iloop, chk;
needlf = FALSE;
inOP = FALSE;
// 1. 初始化EtherCAT主站,指定网卡名称(如eth0)
if (ec_init("eth0") <= 0) {
printf("EtherCAT初始化失败\n");
return -1;
}
// 2. 扫描总线上的从站
if (ec_config_init(FALSE) <= 0) {
printf("没有找到EtherCAT从站\n");
ec_close();
return -1;
}
printf("找到 %d 个EtherCAT从站\n", ec_slavecount);
// 3. 配置过程数据映射
ec_config_map(&IOmap);
ec_configdc(); // 配置分布式时钟
// 4. 将所有从站切换到OP(操作)状态
ec_statecheck(0, EC_STATE_SAFE_OP, EC_TIMEOUTSTATE * 4);
expectedWKC = (ec_group[0].outputsWKC * 2) + ec_group[0].inputsWKC;
ec_slave[0].state = EC_STATE_OPERATIONAL;
ec_send_processdata();
ec_receive_processdata(EC_TIMEOUTRET);
ec_writestate(0);
chk = 40;
do {
ec_send_processdata();
ec_receive_processdata(EC_TIMEOUTRET);
ec_statecheck(0, EC_STATE_OPERATIONAL, 50000);
} while (chk-- && (ec_slave[0].state != EC_STATE_OPERATIONAL));
if (ec_slave[0].state == EC_STATE_OPERATIONAL) {
printf("所有从站进入操作状态,准备运行\n");
inOP = TRUE;
// 5. 主循环:周期性发送和接收过程数据
for (i = 0; i < 1000; i++) {
// 写入关节目标位置(假设第一个从站的输出偏移为0)
float target_pos = 0.001 * i;
*(float *)&IOmap[0] = target_pos;
// 发送过程数据
ec_send_processdata();
// 接收过程数据
wkc = ec_receive_processdata(EC_TIMEOUTRET);
// 读取关节当前位置(假设第一个从站的输入偏移为4)
float current_pos = *(float *)&IOmap[4];
printf("目标位置: %.3f rad, 当前位置: %.3f rad\n", target_pos, current_pos);
usleep(1000); // 1ms周期
}
}
// 6. 停止EtherCAT主站
ec_slave[0].state = EC_STATE_INIT;
ec_writestate(0);
ec_close();
return 0;
}代码解释:
- 这是基于SOEM库的EtherCAT主站最简示例
- 初始化主站并扫描从站
- 配置过程数据映射和分布式时钟
- 将从站切换到操作状态
- 主循环以1ms周期发送目标位置并接收当前位置
五、CAN vs EtherCAT:全方位对比与选型指南
5.1 核心特性对比
表1 CAN与EtherCAT核心特性对比
| 特性 | CAN(经典) | CAN FD | EtherCAT |
|---|---|---|---|
| 诞生时间 | 1986年 | 2012年 | 2003年 |
| 架构 | 多主 | 多主 | 单主多从 |
| 最高带宽 | 1 Mbps | 8 Mbps | 100 Mbps |
| 典型周期 | 10-100 ms | 1-10 ms | 0.1-1 ms |
| 抖动 | 100-1000 us | 50-500 us | <1 us |
| 同步精度 | 毫秒级 | 毫秒级 | 微秒级 |
| 最大从站数 | 32(理论127) | 32 | 65535 |
| 线缆成本 | 低(双绞线) | 低(双绞线) | 中(以太网电缆) |
| 硬件成本 | 极低 | 低 | 中高 |
| 抗干扰能力 | 极强 | 极强 | 强 |
| 调试难度 | 低 | 中 | 高 |
表格分析:
- CAN在成本和抗干扰方面有绝对优势,但性能有限
- CAN FD是CAN的升级,带宽有所提升,但同步和抖动问题没有根本解决
- EtherCAT在性能上全面碾压CAN,但成本和复杂度更高
5.2 适用场景对比
表2 CAN与EtherCAT适用场景对比
| 优先选择CAN的情况 | 优先选择EtherCAT的情况 |
|---|---|
| 成本是第一优先级 | 多轴强同步是第一优先级 |
| 关节数≤6个 | 关节数≥6个 |
| 控制频率≤500 Hz | 控制频率≥1000 Hz |
| 节点类型多样(传感器/IO/驱动器混合) | 主要是伺服驱动器 |
| 布线复杂,环境恶劣 | 环境相对可控 |
| 产品成熟,只需要维护 | 新产品开发,追求高性能 |
5.3 系统架构差异
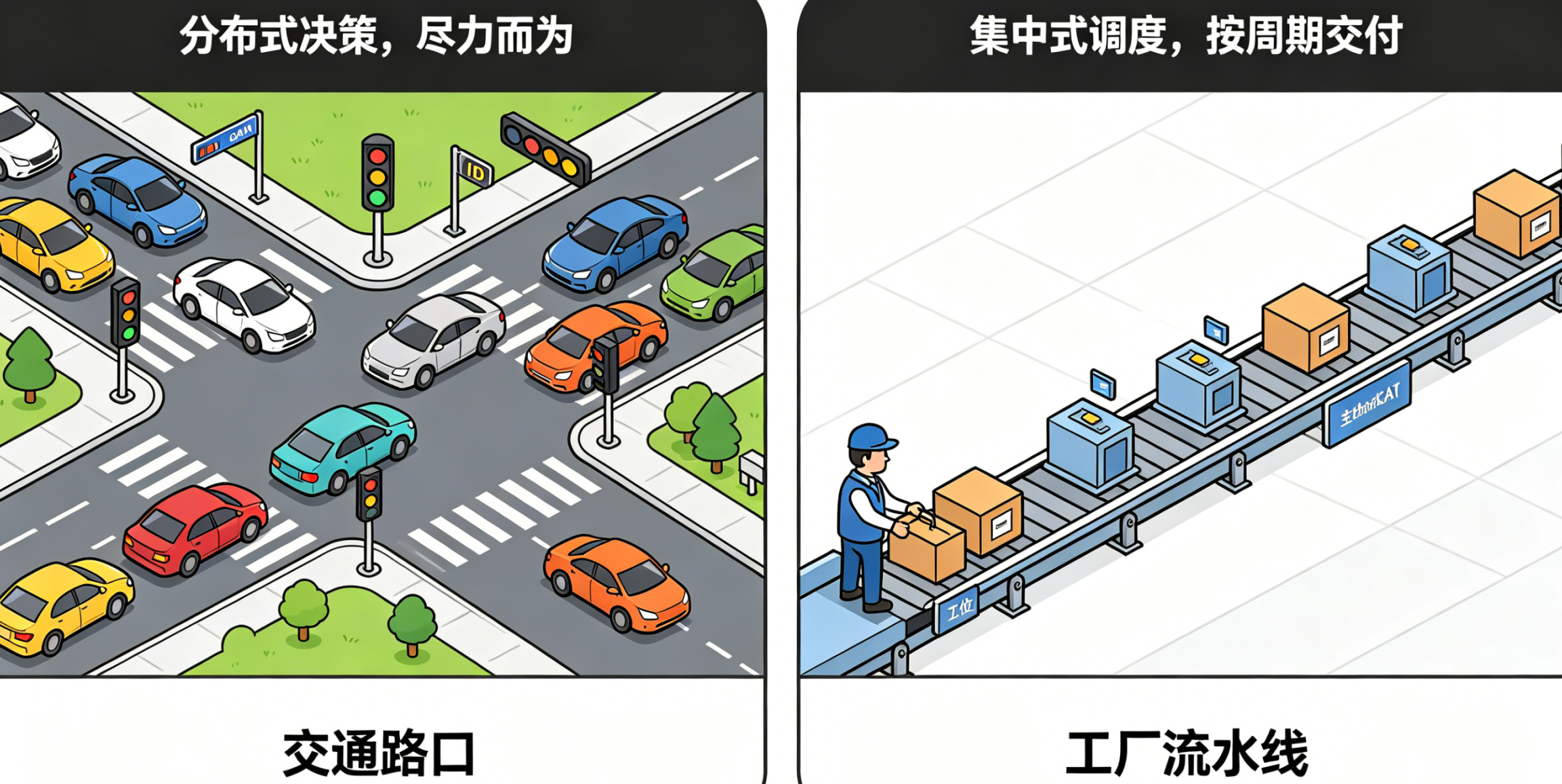
- CAN系统:你更像在管理"交通秩序",需要仔细设计每个消息的ID和优先级,控制总线负载,避免拥堵
- EtherCAT系统:你更像在管理"流水线",只需要安排好每个工位的工作内容,流水线会自动按周期运行
六、总线的本质:控制系统的时间观
很多人把总线当成"只是一根线",但从控制论的视角看,总线是控制系统的一部分,它定义了整个系统的时间观。
CAN代表了一种"尽力而为"的时间观:它会尽最大努力把消息送到,但不保证什么时候送到。这种时间观适合对时间要求不严格的分布式设备网络。
EtherCAT代表了一种"按周期交付"的时间观:它保证每个周期的命令和反馈都会在精确的时间点完成交换。这种时间观正是运动控制系统所必需的。
一个真实的案例:某公司开发了一款6轴机械臂,最初用CAN总线,控制频率100Hz,机器人运动时总是有轻微的抖动,定位精度只能做到±0.5mm。后来换成EtherCAT总线,控制频率提升到1kHz,抖动立刻消失了,定位精度也提高到了±0.1mm。算法没有任何改变,只是换了一条总线。
结语:选对总线,事半功倍
机器人控制总线没有绝对的好坏,只有适合不适合。
- 如果你在做一个简单的3轴搬运机器人,成本敏感,CAN总线完全够用
- 如果你在做人形机器人、四足机器人或者高精度工业机械臂,EtherCAT几乎是唯一的选择
记住:总线方案做对了,控制器才有发挥空间;总线方案做错了,再高级的算法也会被延迟与抖动拖回"看上去能跑、但跑不稳"的状态。
希望这篇文章能帮你彻底搞懂CAN和EtherCAT总线。下次再设计机器人控制系统时,你可以自信地做出正确的选择了。