前言
回顾前面8期内容,我们走完了影像全流程预处理→人工目视解译→SVM/随机森林传统机器学习分类完整链路。从依靠人眼经验判读,到依托人工设计特征实现机器自动分类,遥感解译技术完成了第一轮自动化升级。
但随着遥感卫星组网密集化、观测频次大幅提升,海量多时相、高分辨率影像持续产出,传统技术路线逐渐显现瓶颈:人工特征设计存在上限、复杂地物识别能力不足、难以应对亿级像素大数据场景。
在此背景下,深度学习凭借强大的自动特征学习能力,推动遥感解译迈入全新阶段。本期作为承上启下的核心篇章,纵向梳理「人工目视→传统机器学习→深度学习」三代技术的进化逻辑,横向拆解遥感领域三大主流AI任务,同时给出落地代码、场景与模型选型方案。
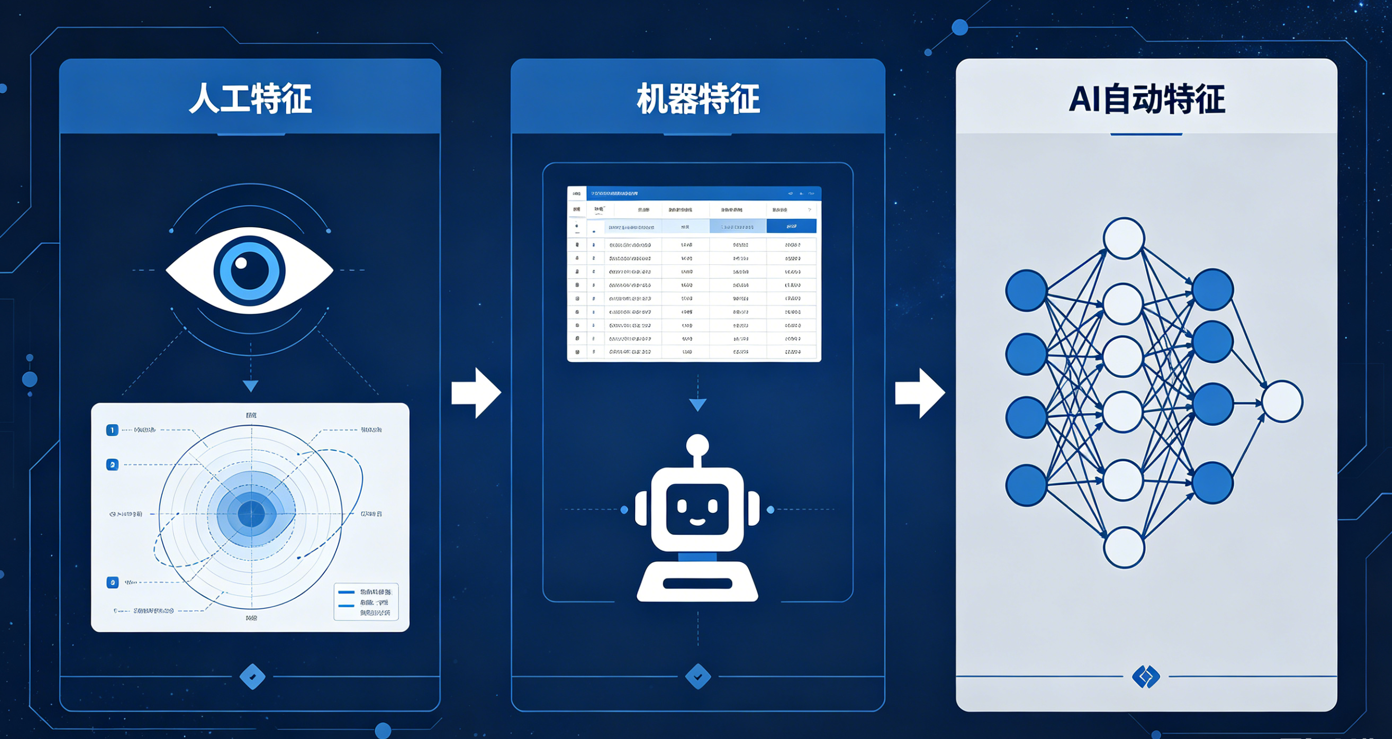
一、三代特征提取逻辑:人工→机器→AI自动特征
特征是遥感地物识别的核心载体,特征提取方式的迭代,也是整个遥感解译技术演进的核心主线。不同技术路线对应完全不同的特征获取模式,能力与边界差异显著。
1.1 人工特征(目视解译阶段)
依靠人眼识别影像色调、纹理、形状、阴影四大解译标志,结合行业经验完成地物判读。全程无算法、无代码,判断结果完全依托从业者专业积累。
- 优势:地物边界识别精准、灵活度高、无需算力支撑
- 短板:作业效率极低、主观偏差大、无法规模化批量处理
1.2 机器特征(传统机器学习阶段)
以SVM、随机森林为代表的传统机器学习,需要技术人员人工完成特征工程。根据遥感知识提取光谱、纹理、专题指数等量化特征,将图像信息转为数值矩阵后送入模型,算法仅负责分类决策。
- 优势:特征可解释性强、小样本友好、普通CPU即可运行、实验结果稳定易复现
- 短板:特征依赖人工设计,复杂地物、同谱异物场景精度存在明显上限
1.3 AI自动特征(深度学习阶段)
卷积神经网络(CNN)依靠多层卷积、池化结构,端到端自主完成特征挖掘。网络可逐层提取浅层纹理、中层轮廓、深层语义特征,全程无需人为定义特征规则,让模型自主学习地物本质规律。
- 优势:特征表达能力极强,适配复杂场景与海量数据,细碎目标识别效果远超传统算法
- 短板:依赖大规模标注数据集、推荐GPU加速训练、模型可解释性较弱
二、深度学习适配遥感大数据的核心原因
当前高分、哨兵、Landsat等卫星持续组网观测,单区域多时相数据体量可达TB级别,传统目视解译、传统机器学习已难以承载业务需求,深度学习成为大数据时代的最优选择,核心原因分为四点:
- 多尺度特征表达
突破人工特征的局限性,网络可自适应提取不同尺度特征,同时兼顾微小纹理与大范围地物分布规律,完美适配高分辨率遥感影像。 - 并行计算效率突出
依托GPU并行运算能力,可批量处理数万张影像,运算效率相比传统技术提升数十倍,轻松应对长时序、大范围遥感监测任务。 - 跨场景泛化能力强
充分训练后的模型能够学习地物通用特征,面对不同区域、不同季节时相、不同传感器拍摄的影像,依旧可以保持稳定识别效果。 - 任务拓展性丰富
一套深度学习技术体系,可同时支撑分类、检测、分割等多类任务,覆盖遥感行业绝大多数业务场景,技术复用性更强。
三、AI遥感三大核心任务(场景+代码演示)
进入深度学习阶段后,图像分类、目标检测、语义分割是遥感领域三大基础任务,三者输出形式、应用场景、技术难度各不相同,也是新手选择模型的重要依据。下文结合遥感落地场景,搭配可直接运行的演示代码。
3.1 图像分类(整图判别类别)
任务定义 :对整张遥感影像进行全局类别判定,仅输出整图所属类别,不定位地物位置、不勾勒边界。
典型场景:全域土地利用大类判别、灾害全局识别、影像归档与粗筛选。
极简推理代码(PyTorch)
python
# 极简遥感影像分类模型(MobileNet 轻量模型)
import torch
import torchvision.models as models
from torchvision import transforms
from PIL import Image
# 加载预训练模型,切换为推理模式
model = models.mobilenet_v2(pretrained=True)
model.eval()
# 定义影像预处理规则
transform = transforms.Compose([
transforms.Resize((256, 256)),
transforms.ToTensor(),
])
# 读取遥感切片影像
img = Image.open("slice_512.png").convert("RGB")
img_tensor = transform(img).unsqueeze(0)
# 关闭梯度计算,加速推理
with torch.no_grad():
output = model(img_tensor)
pred_class = torch.argmax(output).item()
print("✅ 影像预测类别编号:", pred_class)3.2 目标检测(定位+分类双任务)
任务定义 :在影像中定位目标坐标,同时判定目标类别,使用矩形框标注独立地物,实现「定位+分类」一体化。
典型场景:小型建筑、车辆、光伏板、船只识别,灾害点位排查、地物数量统计。
YOLOv8 极简推理代码
python
from ultralytics import YOLO
# 加载预训练检测模型
model = YOLO('yolov8s.pt')
# 对遥感影像执行目标检测
results = model("remote_sensing.png")
# 遍历并输出检测结果
for res in results:
print("✅ 影像内检测到目标数量:", len(res.boxes))3.3 语义分割(像素级分类)
任务定义 :对影像每一个像素 进行类别划分,精准勾勒地物轮廓边界,是遥感精细化解译的核心任务。细分语义分割、实例分割两类,前者同类地物不做个体区分,后者可区分同一类别下不同单体。
典型场景:土地利用精细分类、植被覆盖度计算、水体/耕地边界提取、生态环境监测。
简易U-Net 演示代码
python
import torch
import torch.nn as nn
# 轻量化U-Net基础结构,遥感语义分割主流框架
class TinyUNet(nn.Module):
def __init__(self):
super().__init__()
self.conv1 = nn.Conv2d(3, 16, 3, padding=1)
self.conv2 = nn.Conv2d(16, 4, 3, padding=1)
self.relu = nn.ReLU()
def forward(self, x):
x = self.relu(self.conv1(x))
x = self.conv2(x)
return x
# 初始化模型
model = TinyUNet()
# 模拟256*256尺寸遥感影像输入
dummy_img = torch.randn(1, 3, 256, 256)
pred_mask = model(dummy_img)
print("✅ 输出分割Mask尺寸:", pred_mask.shape)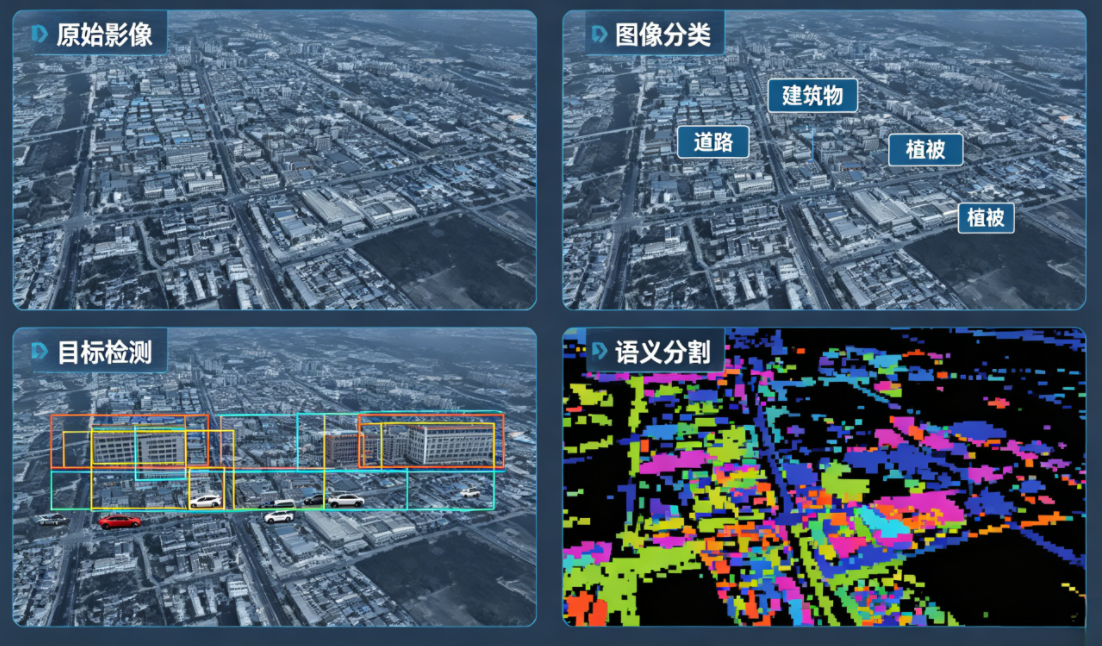
四、新手模型选型指南
结合任务类型、样本数量、硬件配置、技术难度,整理标准化选型方案,同时给出新手学习进阶路线,避免盲目选型。
图像分类
- 推荐模型:MobileNet、ResNet18
- 学习难度:⭐
- 适配场景:零基础入门、样本数量少、影像粗分类、快速验证方案
目标检测
- 推荐模型:YOLOv8/YOLOv10、Faster-RCNN
- 学习难度:⭐⭐⭐
- 适配场景:小目标识别、地物定位、目标计数、违建/灾害点位排查
语义分割
- 推荐模型:U-Net、SegFormer
- 学习难度:⭐⭐⭐⭐
- 适配场景:毕业论文、工程项目、高精度地物提取、像素级定量分析
新手标准学习路线
遵循 图像分类 → 目标检测 → 语义分割 顺序循序渐进,从简单任务熟悉数据集制作、模型训练、推理全流程,再挑战高难度像素级分割任务。

五、传统机器学习 vs 深度学习 核心代码对比
直观对比两类技术的代码形态,感受技术架构差异:
传统机器学习(随机森林)
python
from sklearn.ensemble import RandomForestClassifier
# 初始化模型 + 训练
model = RandomForestClassifier()
model.fit(X_train, y_train)深度学习(ResNet分类网络)
python
import torch
# 加载预训练深度学习模型
model = torch.hub.load('pytorch/vision', 'resnet18', pretrained=True)
model.eval()✅ 本期核心总结
- 遥感解译技术迭代核心:人工特征 → 人工设计机器特征 → AI自动特征,特征能力逐级提升;
- 深度学习凭借特征、算力、泛化性优势,成为遥感大数据时代的主流技术;
- 三大核心任务区分:分类(整图标签)、检测(框选目标)、分割(像素级掩码);
- 新手遵循「由易到难」路线,结合样本、硬件、项目需求合理选择任务与模型。
📌 下期预告
第10期:遥感影像分类实战:MobileNet 模型训练 + 推理全流程
从数据集制作、模型训练、参数调优到结果推理,手把手完成入门级分类项目,零基础可完整复现。