环路增益由三部分的乘积构成:占空比--输出传递函数 、PWM 增益
和电压反馈补偿
。
在这三个因素中,只有电压反馈补偿是可以通过设计改变的部分。对于给定的
和
,通过设计电压反馈补偿
来获得良好的环路增益特性。
电压反馈补偿的目的是将环路增益设为期望的结构。当然,该环路增益主要是为了变换器的稳定性。此外,环路增益应提供良好的音频敏感度和输出阻抗特性。
Buck 变换器的占空比--输出传递函数为
{8.39}
PWM 增益为
{8.40}
式中, 是 PWM 斜坡信号的高度。根据占空比--输出传递函数和 PWM 增益的知识,研究了电压反馈补偿的结构。
1、单积分器的问题
电压反馈补偿应具有无限直流增益 ,以便将输出电压调节到所需值。单积分器是具有该特性的最简单电路。作为初始尝试,电压反馈补偿采用单积分器:
{8.41}
环路增益的表达式为
{8.42}
式中
{8.43}
相比于 而言,
和
的渐近图如图 8.9 所示。由于积分器的存在,
以斜率 -1 为起点。在双极点频率
处,斜率从 -1 变为 -3。在 ESR 零点
,-3 的中频斜率最终变为 -2 的高频斜率。假定图 8.9 中环路增益的交越频率
在功率级双极点与 ESR 零点的频率之间:
。
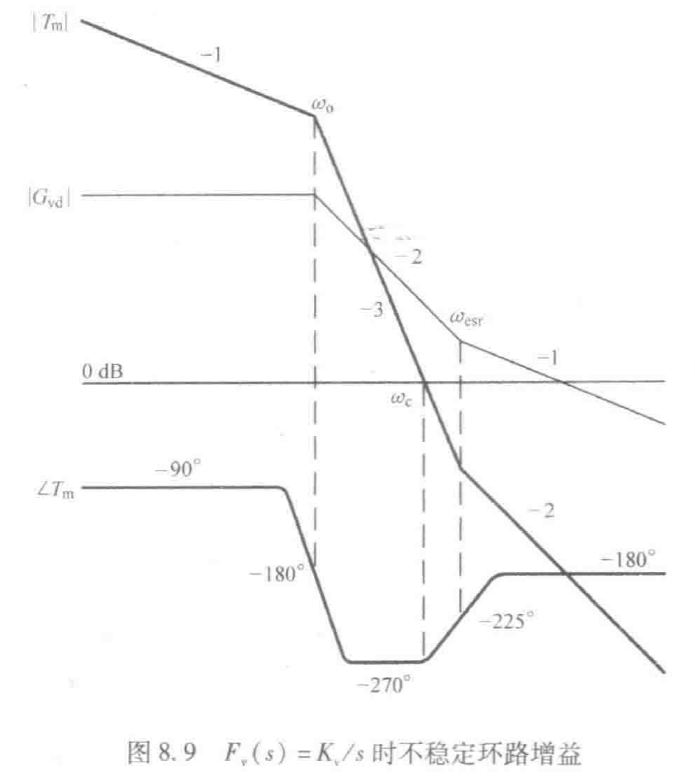
由于积分器的存在,环路增益的相位起点是 。在频率
处,相位从
下降到
。在高频时,零点处有
的相位上升,
最终是
。
在图 8.9 中,电压反馈补偿存在的问题是显而易见的。因为在环路增益交越频率处, 远低于
,所以环路增益不满足奈奎斯特稳定性规则,变换器变得不稳定。确保变换器稳定的唯一方法是降低积分器增益
,使
在功率级双极点前与 0 dB 轴相交:
。
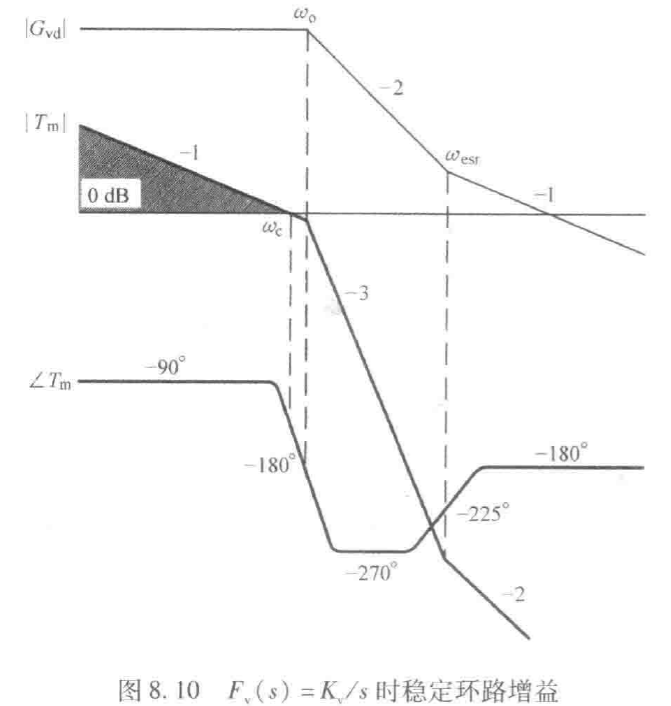
图 8.10 是修改了的环路增益。即使变换器稳定,相位和增益裕度都非常小。此外, 随着小积分器增益而明显降低。如图 8.10 中的阴影三角形所示,减小的
只为闭环传递函数提供有限的衰减。对于这种情况,闭环传递函数的幅值很大。小的稳定裕度和大的闭环传递函数幅值使得电压反馈补偿不能在实际中应用。
2、电压反馈补偿
在单积分器补偿的情况下,问题在于积分器和功率级双极点引起的相位延迟。积分器强制环路增益以 的初始相位开始,功率级双极点带来额外的
相位延迟,导致
降至
,这使得变换器非常不稳定。为了在该情况下保证稳定性,环路增益交越频率应移至功率级双极点前,但牺牲了闭环性能。
电压反馈补偿应始终从积分器结构开始,以满足条件 的输出电压调节。在初始积分器之后,电压反馈补偿可以包含两个零点来提高环路增益的相位。在功率级双极点附近,两个零点对功率级两个极点引起的
相位延迟进行补偿,这使得 0 dB 交越频率可以超过功率级双极点频率,同时保持良好的相位特性。
除了两个零点之外,还应在电压反馈补偿中增加两个极点,原因如下。电压反馈电路从变换器的输出端接收输入信号,会引入高频开关噪声。通过电压反馈补偿将高频噪声传输到 PWM 模块。为了防止 PWM 模块的高频噪声引发故障,电压反馈补偿必须在高频下有相当大的衰减。为了实现高频噪声衰减功能,电压反馈补偿的幅值应该有一个下降的高频渐近线。因为存在两个零点,所以两个极点在高频下应以 20 dB/dec 下降。
根据上述讨论,将所需的电压反馈补偿结构确定为
{8.44}
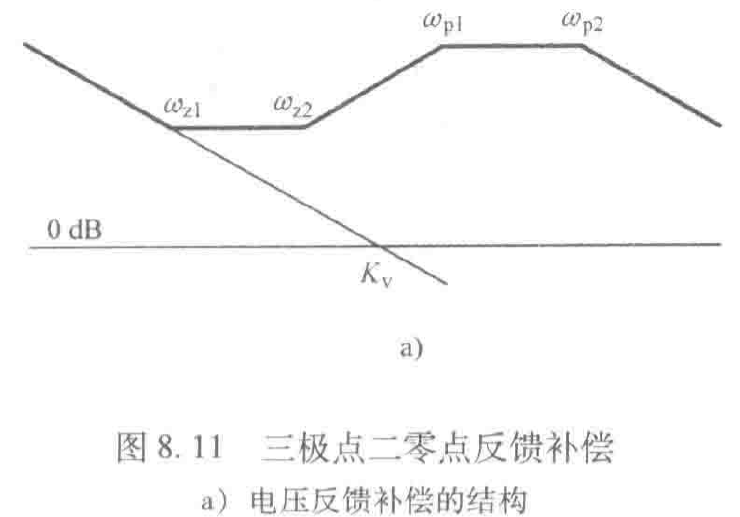
图 8.11a 所示的是电压反馈补偿的渐近图。必须考虑零点和极点的具体位置对稳定裕度和闭环传递函数的影响。
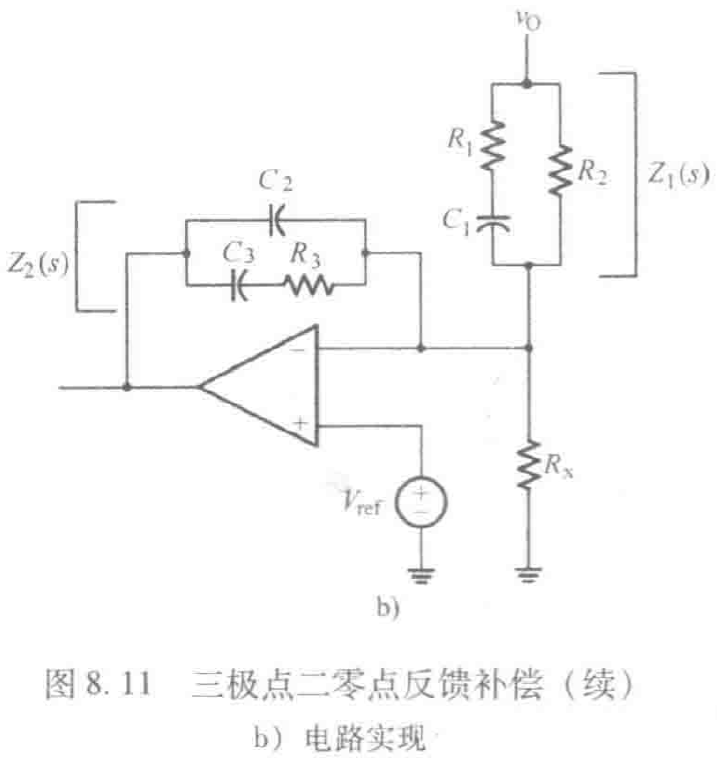
图 8.11a 中的电压反馈补偿电路由运算放大器和无源电路元器件组成。
具体电路如图 8.11b 所示,其中阻抗比 构成电压反馈补偿。图 8.11b 中的电阻
用来控制输出电压的大小:
。该电阻与电压反馈补偿无关。直接计算
,以电路元器件形式表示补偿参数。
式中
{8.45}
一旦选定积分器增益和角频率,则使用上述方程确定图 8.11b 中的电路元器件。可以任意选择 6 个电路元器件中的 1 个,并用式 (8.45) 中的方程求解其他元器件。【006】【014】中介绍了该补偿电路,该电路称为三极点二零点补偿电路。