一、公式定义:
一个三维向量 绕着一个 单位特征转轴
逆时针旋转 θ 角度,那么旋转后向量
的罗德里格斯(Rodrigues)公式为:
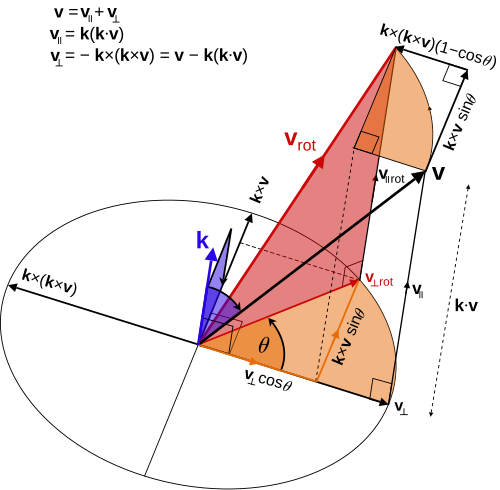
二、推导方式:空间向量的正交分解
1. 向量的正交投影与空间分解
在三维欧氏空间中,任意向量 都可以被分解为两个相互正交的分量:
-
平行于转轴的分量
-
垂直于转轴的分量
根据向量投影的代数定义, 在单位向量
上的投影(平行分量)为:
进而可以推导出垂直于转轴的分量 为:
当整个空间绕轴 旋转时,平行分量
在物理上是绝对不动的 。因此,旋转后的新向量
仍然由两部分组成:
其中 是垂直分量
旋转
角度后的新位置。
2. 在旋转平面内建立二维几何基底
为了求解旋转后的 ,在垂直于
的平面内构建一组标准的正交基(即二维坐标系)。
-
第一个基向量(横轴方向):直接取垂直分量本身:
-
第二个基向量(纵轴方向) :将第一个基向量绕
轴做 90° 叉乘变换。由于
注意到 ,将其带入
中:
由于 与它的平行分量
方向完全相同,两者的叉乘
。因此,第二个基向量可以直接表示为:
至此,在旋转平面内确立了两根完全正交且等模长的轴线: 和
3. 利用三角函数进行平面内的矢量合成
由**平面极坐标(Polar Coordinates)转换为直角坐标(Cartesian Coordinates)**的向量表达式可知:
旋转后的向量 可以通过
和
这组正交基底线性组合,新向量分别投影在横轴
方向和纵轴
方向上,其大小由
和
决定:
代入前面求得的基底表达式:
4. 总矢量合成(代数整理)
将旋转后的垂直分量 与保持不动的平行分量
重新相加,即可得到完整的空间旋转结果:
为了消除中间变量 ,将
带入上式:
由向量三重积公式(vector triple product formula)
令 ,有
最终得到:
5. 旋转定义
叉乘操作 是一个标准的线性变换,它可以被重写为一个矩阵与向量的乘法。若令单位轴
,定义其对应的斜对称矩阵
(在某些文献或 Eigen 库中也常写为
)为:
有:
最终得到:
将同类项合并后,可以得到一个更紧凑(简洁)的表达式:
其中:
三、推导方式:李群李代数的指数映射
对于空间中的任意单位旋转轴 (满足
),定义其对应的叉乘斜对称矩阵
为:
该矩阵满足向量叉乘的算子同构关系::
根据李群与李代数的指数映射关系,绕单位轴 旋转
角度的旋转矩阵可写成:
根据矩阵指数函数的泰勒级数定义,将其展开为无穷级数形态:
对于单位向量 ,其斜对称矩阵的高次幂具有如下固有的周期循环特性:
利用上述高次幂降维特性,将角度标量 提取,并把含有
与
的项分别归类,该级数可以整理为:
即:
四、从旋转矩阵到四元数
1. 旋转矩阵展开成罗德里格斯矩阵形式
2. 四元数的物理定义
单位四元数通过轴角 的定义为:
3. 求实部 w:
对旋转矩阵 的主对角线元素求和(求迹,
):
将罗德里格斯展开式的主对角线相加:
因为 是单位向量(
),上式化简为:
半角公式 :
由此,可以得到四元数实部的解析解:
4. 求虚部
利用倍角公式 和
,可以发现:
有:
类似地,通过两两相减,能剥离出非对角线元素与四元数乘积的严格对应关系:
从而解出虚部: