目录
[5.1 OFDM基带发射信号基础模型](#5.1 OFDM基带发射信号基础模型)
[5.2 雷达回波信号耦合机理](#5.2 雷达回波信号耦合机理)
[5.3 通信与雷达信号解耦原理](#5.3 通信与雷达信号解耦原理)
[5.4 雷达感知支路------距离-多普勒二维参数估计](#5.4 雷达感知支路——距离-多普勒二维参数估计)
[5.5 符号时间维度相位差分估计径向速度](#5.5 符号时间维度相位差分估计径向速度)
✨1.前言
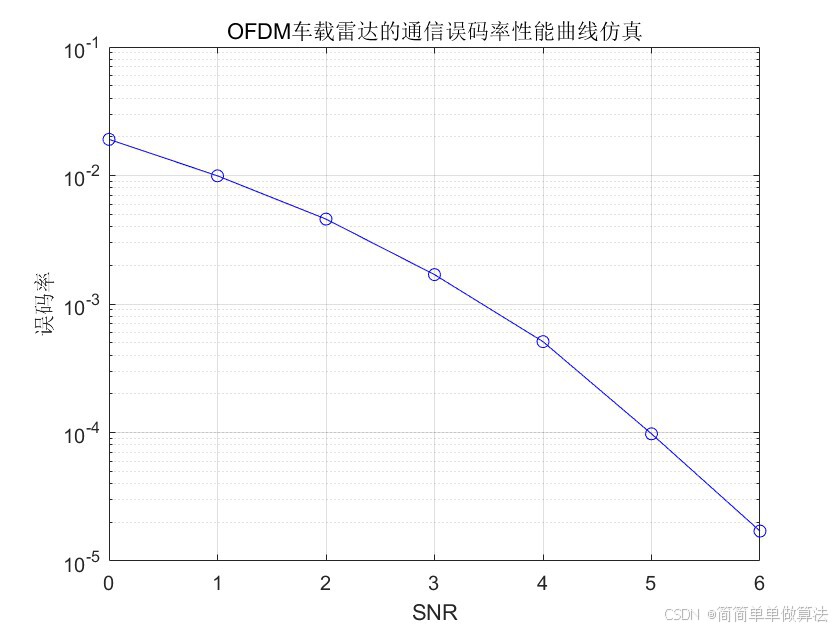
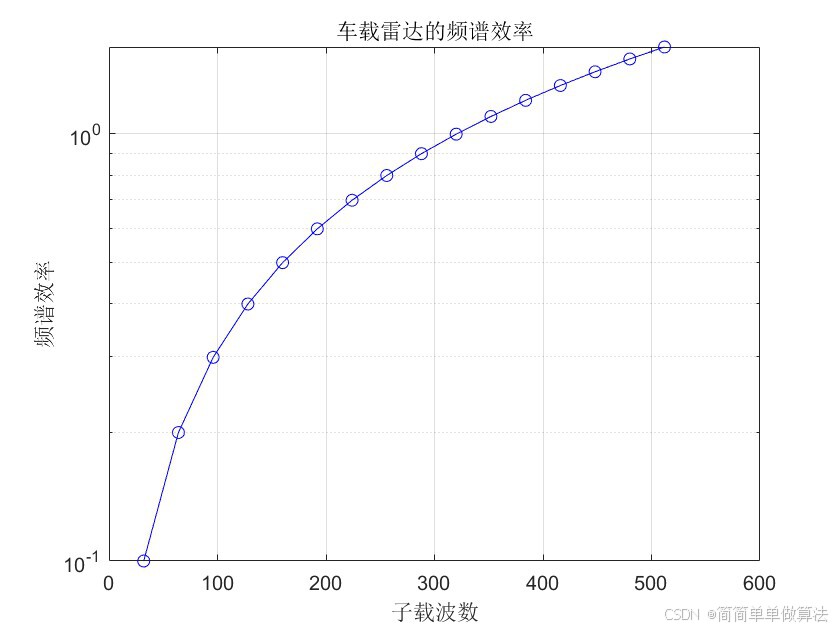
车联网雷达通信一体化核心诉求是同一套车载硬件、同一帧OFDM时域波形同时完成两大功能:高速车车 / 车路无线数据通信、车辆周边目标测速测距雷达感知,无需分别搭载独立通信发射机与雷达射频前端,大幅缩减车载终端体积、功耗与硬件成本。OFDM凭借正交子载波频谱重叠、抗多径衰落、带宽灵活分配、子载波独立调制的天然优势,成为车联网高速移动场景下一体化波形的首选载体。
📡2.算法测试效果图预览
🔍3.算法运行软件版本
matlab2024B
✅4.部分核心程序
for n = 1:Nr
st = stt.*exp(j*2*pi*f(n)*t);
st_fft = fft(st,Nr);
prod = st_fft.*conj(stt_fft);
signal_ofdm(:,n) = fftshift(abs(ifft(prod)'));
end
signal_ofdm = signal_ofdm/max(max(signal_ofdm));
figure
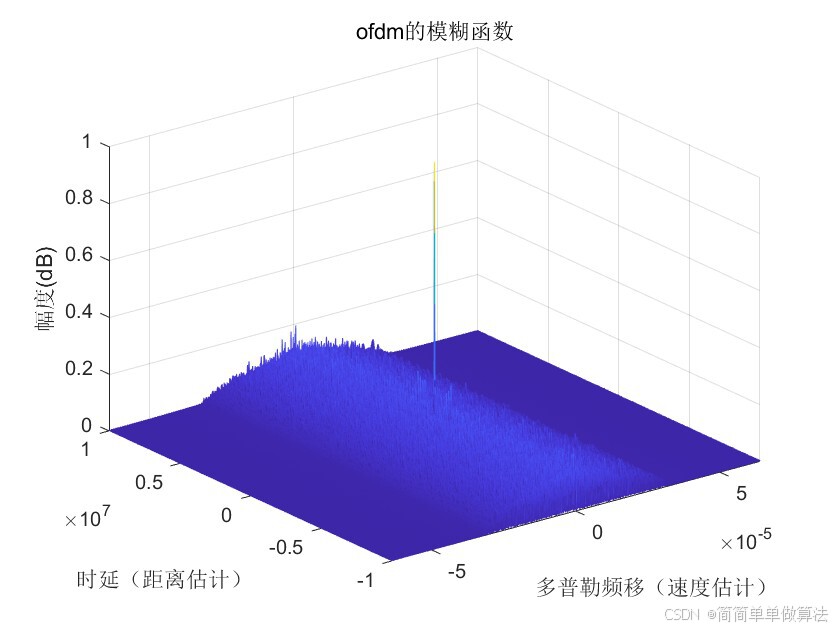
mesh(t,f,signal_ofdm);
title('ofdm的模糊函数');
xlabel('多普勒频移(速度估计)');
ylabel('时延(距离估计)');
zlabel('幅度(dB)');
figure
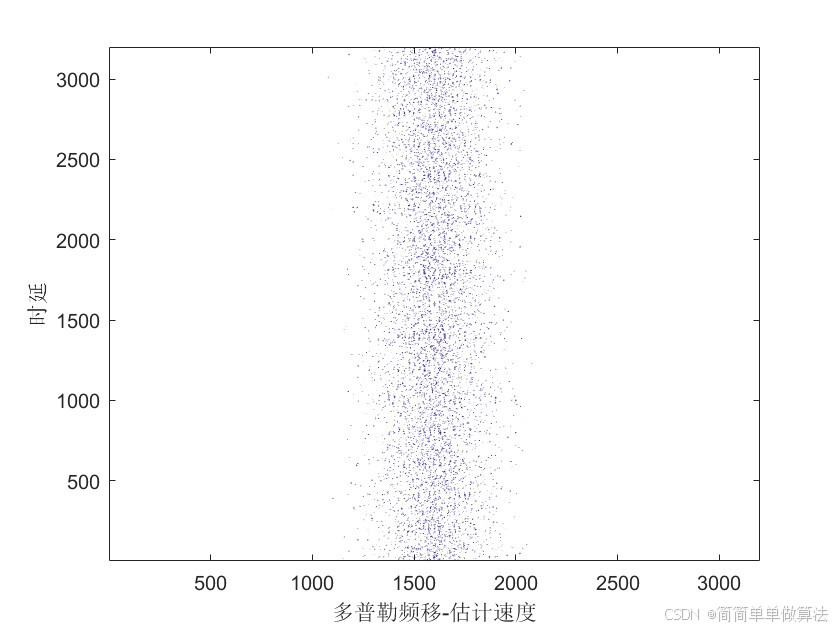
contour(signal_ofdm);
xlabel('多普勒频移-估计速度');
ylabel('时延');
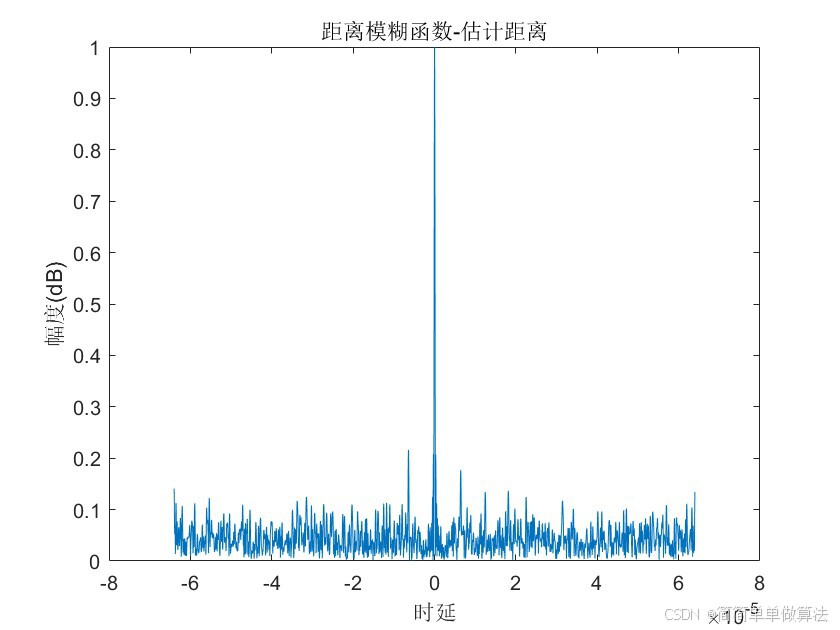
figure
plot(t,signal_ofdm(:,Nr/2));
title('距离模糊函数-估计距离');
xlabel('时延');
ylabel('幅度(dB)');
%
disp('距离估计值/m');
[V,I] = max(signal_ofdm(:,Nr/2));
test = 1e3*t(I)*3e8;
test
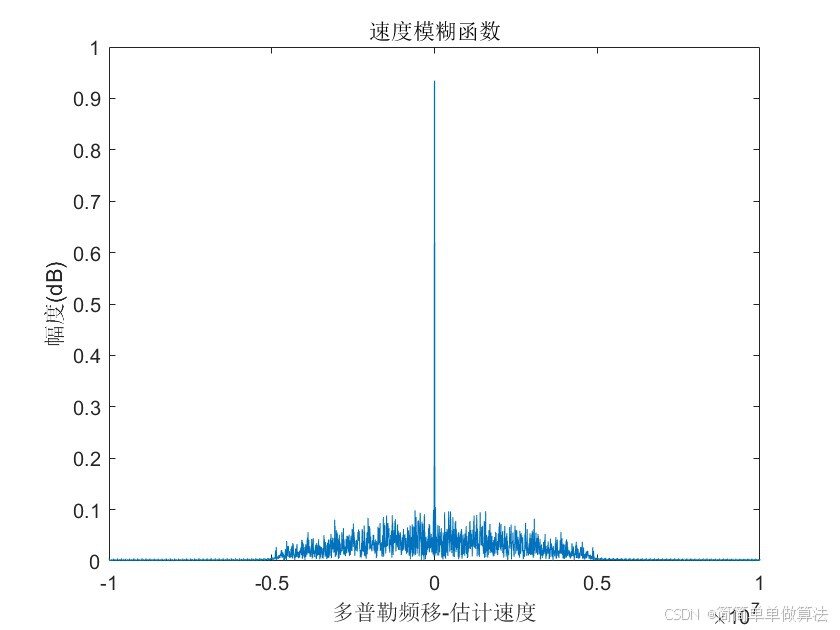
figure
plot(f,signal_ofdm(Nr/2,:));
title('速度模糊函数');
xlabel('多普勒频移-估计速度');
ylabel('幅度(dB)');
%
disp('速度估计值m/s');
[V,I] = max(signal_ofdm(Nr/2,:));
fest = abs(f(I));
speed = fest/f0*3e8;
speed🚀5.算法理论概述
车载场景存在高速多普勒扩展、多径杂波、远近目标功率差极大、多车 OFDM 信号相互干扰等特有问题,该一体化算法在 OFDM 帧结构内插入专属导频子载波,兼顾通信信道均衡与雷达回波相位提取,适配城市道路、高速车流、交叉口拥堵等全场景车联网应用。
5.1 OFDM基带发射信号基础模型
设一体化 OFDM 系统总共有N个正交子载波,子载波索引k=0,1,2,...,N−1,单个OFDM符号持续时长为Ts,循环前缀CP长度为Tcp,子载波间隔Δf= 1/Ts。
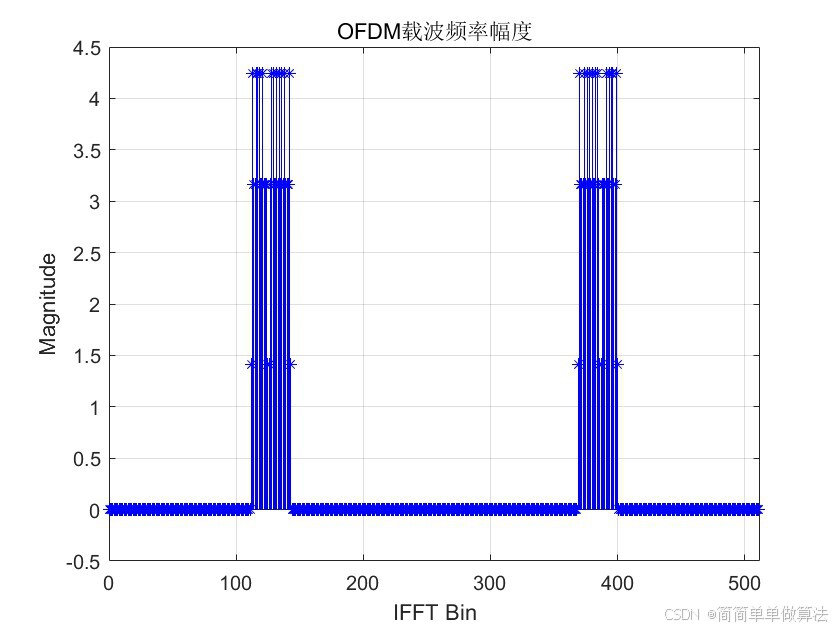
发送端每个子载波携带经过QAM/QPSK调制的通信复基带数据符号Xk,Xk同时承载车联网交互数据包(车速、位置、制动信号、路况信息),经过N点逆离散傅里叶变换生成时域OFDM基带发射信号。
不含循环前缀的时域离散发射信号表达式为:

插入循环前缀后,完整单符号时域发射信号通过数模转换、射频上变频至车载专用通信频段发射,该波形既是通信调制信号,也是雷达探测发射波形。
5.2 雷达回波信号耦合机理
发射电磁波经周边车辆、路侧障碍物、行人等目标反射形成回波,回波信号叠加多径传输时延、目标径向多普勒频移、路径衰减、高斯噪声后回到车载接收天线。设某一静止或运动目标相对发射端径向距离为R,径向速度为v(靠近接收机速度为正,远离为负),电磁波光速为c,载波中心频率fc,波长λ= c/fc。
电磁波往返传播时延由双向距离决定:

目标运动带来的多普勒频移来源于载波相位双向偏移:

接收端射频下变频、模数采样后得到含通信调制信息 + 雷达回波分量的基带接收时域信号,单目标回波离散时域表达式为:

式中α为目标反射幅度衰减系数,nτ是时延对应的采样点数,wn为加性高斯白噪声。该接收信号同时包含通信调制载荷与目标距离、速度物理特征,是一体化联合处理的核心依据。
5.3 通信与雷达信号解耦原理
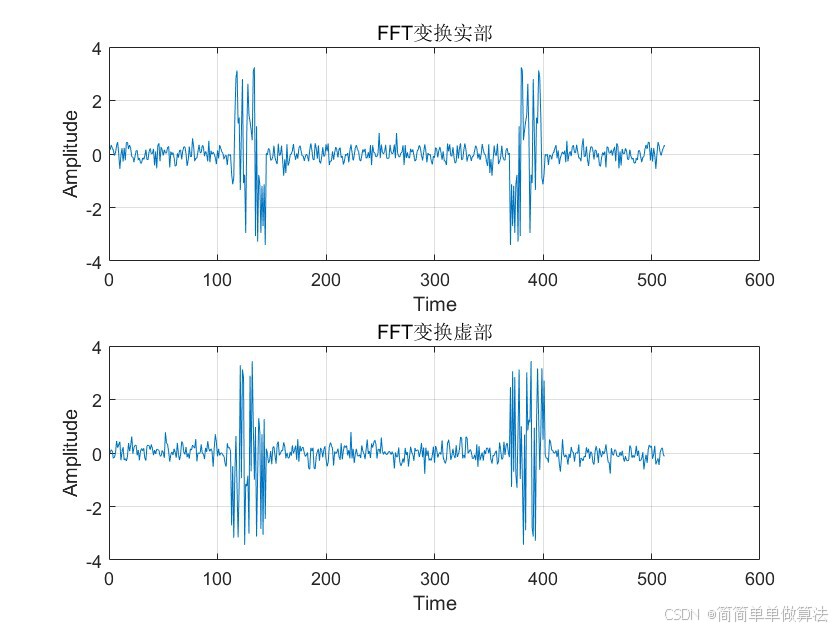
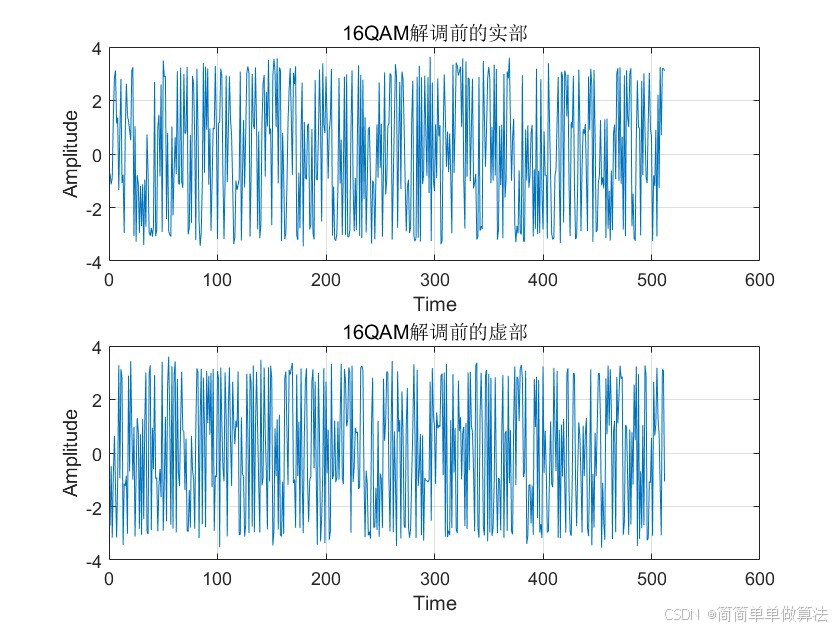
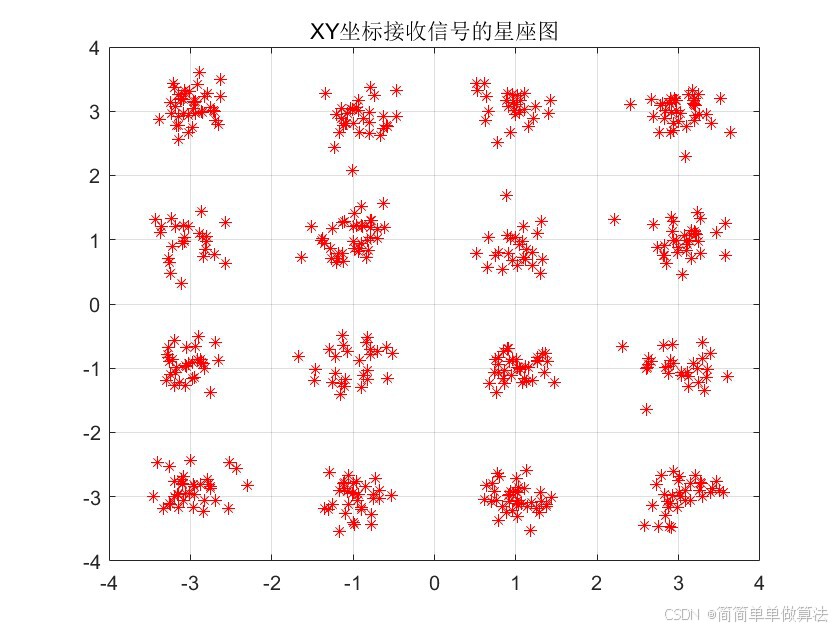
OFDM接收端先去除循环前缀,做N点离散傅里叶变换得到频域接收子载波信号Yk。频域下时延体现为子载波线性相位偏移,多普勒频移体现为子载波间相位随符号序号线性变化,而通信调制符号仅叠加固定复幅度偏移,二者在二维(子载波-OFDM 符号)维度具备可分离特性。 通信处理支路:利用导频子载波做信道估计,补偿信道衰落与固定相位偏移,直接解调Yk恢复原始通信比特流,完成车联网数据交互。 雷达感知支路:剔除通信调制符号Xk的固有幅度相位,仅保留回波引入的相位畸变,沿子载波维度做时延估计求解距离,沿OFDM符号时间维度做相位差分求解多普勒速度,实现雷达参数提取。
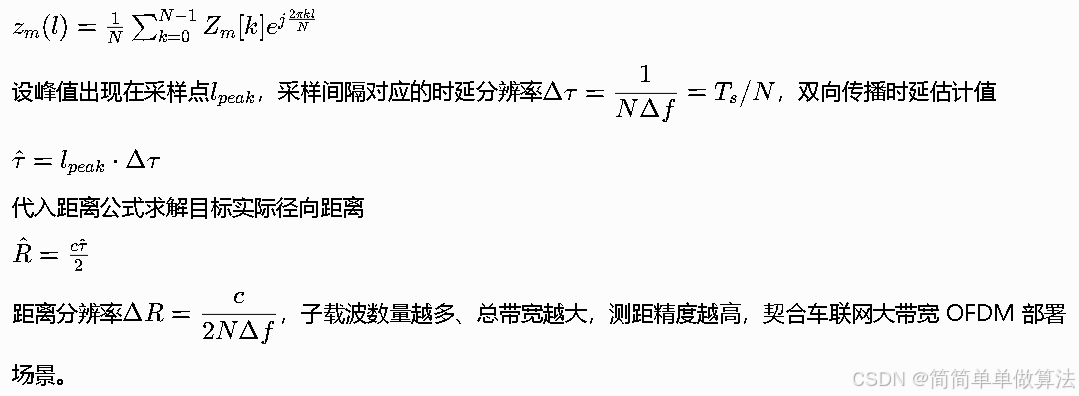
5.4 雷达感知支路------距离-多普勒二维参数估计
固定OFDM符号序号m,沿子载波维度k对Zmk做N点逆傅里叶变换,相位项e−j2πkΔfτ随k线性变化,IFFT峰值位置对应时延τ。变换后时域距离域信号:
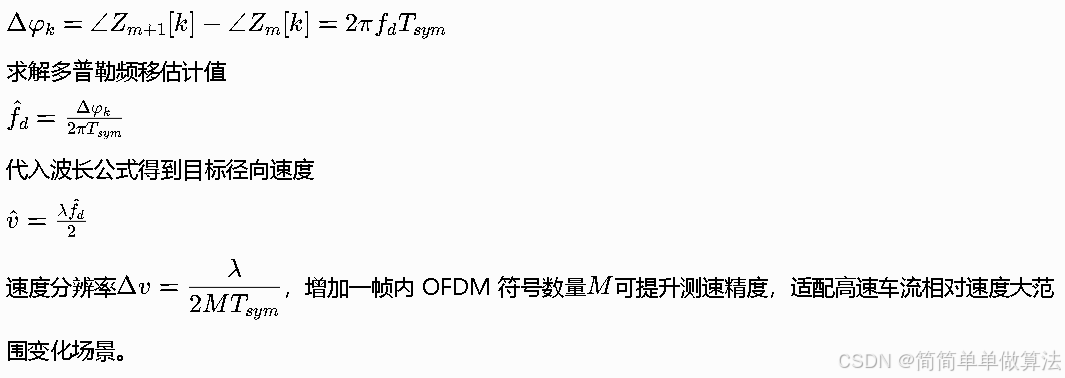
5.5 符号时间维度相位差分估计径向速度
同一子载波k,连续M个OFDM符号间仅多普勒频移带来相位累积变化,相邻符号相位差:
高速相对运动下多普勒扩展会破坏OFDM子载波正交性,带来子载波间干扰ICI,同时通信解调误码率上升、雷达相位提取精度下降;远近车辆回波功率动态范围极大,近端强目标回波会掩盖远端弱目标峰值,需要结合动态增益调整与干扰抑制算法优化;多车同频OFDM信号相互叠加会引入互干扰,需搭配车联网时分多址、子载波资源分配机制实现多车一体化组网。
💡6.算法完整程序工程
OOOOO
OOO
O
关注GZH后输入回复:0052