水下考古、海洋工程、生态监测------这些领域对高精度水下三维重建的需求从未像今天这样迫切。
然而,水下环境给3D重建设置了天然的障碍。

一、水下3D重建存在三大挑战
01 深度相关的颜色衰减
光在水中的传播与在空气中截然不同。随着深度增加,红色光最先被吸收,接着是橙色、黄色......这就是为什么水下照片普遍偏蓝偏绿。更麻烦的是,这种衰减是距离相关的------同一物体在不同距离拍摄,颜色表现完全不同。
02 散射引起的"雾效"
水中的悬浮颗粒(浮游生物、泥沙等)会使光线发生散射。前向散射导致图像细节模糊,后向散射则产生类似雾气的朦胧效果。两者叠加,让水下图像像蒙了一层"水做的毛玻璃"。
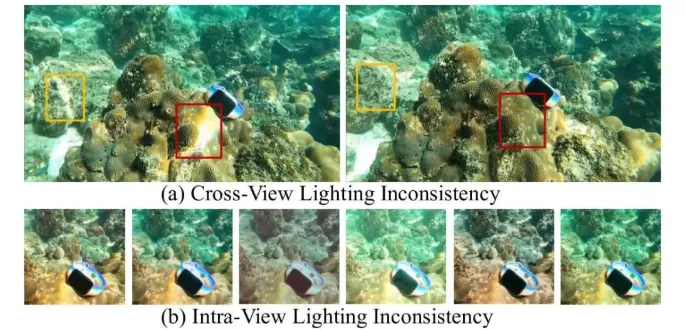
03 非均匀光照
水面波动造成的光影变幻、人造光源带来的光照不均匀、不同拍摄角度的反射差异------这些因素叠加,导致同一物体在不同视角下呈现完全不同的外观。
后果是什么?
无论是NeRF还是3D高斯泼溅(3DGS),这些在陆地上表现优异的方法,都默认输入图像来自空气介质。直接应用于水下场景时,几何失真、纹理模糊、颜色不一致等问题接踵而至,重建质量大打折扣。
扫描文末二维码报名活动

二、R-Splatting:给水下3DGS引来新突破
2025年,布里斯托大学与北京航空航天大学联合提出R-Splatting,一个专门面向水下场景的3DGS重建框架。论文标题耐人寻味------《From Restoration to Reconstruction: Rethinking 3D Gaussian Splatting for Underwater Scenes》。
核心思想很简单:不打"硬仗",先修复,再重建。
思路:让多个UIR模型"组团作战"
水下图像修复(UIR)技术已经非常成熟------有的擅长颜色校正,有的擅长去雾,有的擅长对比度增强。问题是:没有一个是万能的。
R-Splatting的思路是"我全都要":

1.对同一组多视角水下图像,应用M个不同的UIR模型,得到M+1组增强结果(含原始图像)
2.用一个统一的3DGS框架,将所有增强结果融合重建为一个3D模型
3.无需为每种修复风格单独训练模型,大幅降低计算与存储开销
为什么"1+1>2"?因为不同UIR模型的优势可以互补------A模型去雾强,B模型颜色正,C模型对比高。R-Splatting让它们协同工作,而不是强迫选择一个"最好的"。
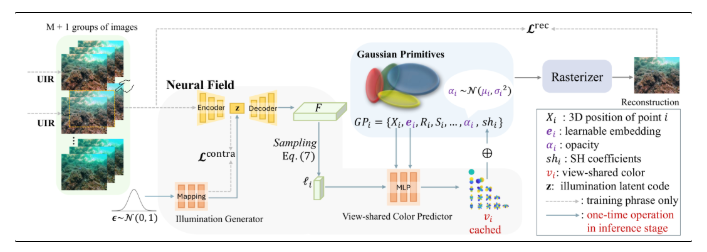
创新点一:视角共享颜色建模
痛点:不同UIR模型可能使同一物体在不同照片里颜色不一致------有的偏红,有的偏蓝,有的正常。3DGS模型会困惑:"我到底该学哪个颜色?"
解法:引入神经场,学习所有增强图像中的"共同颜色"。通俗理解:同时看到一张"偏红"和一张"偏蓝"的同一物体照片后,推理出"它应该是灰色的"。
技术层面,R-Splatting使用轻量自编码器从图像中提取光照编码,并通过对比学习将相同修复风格的编码拉近、不同风格推远。最终,所有高斯点共享同一套光照参数,实现多视角一致渲染。
推理阶段:神经场仅执行一次,即可渲染多个视角,延迟极低。
创新点二:不确定性感知透明度优化(UAOO)
痛点:水下图像的光照极其复杂,水面反射、人造光源、阴影交织在一起。传统3DGS容易在"拿不准"的地方硬造细节,产生伪影或过度模糊。
解法:不直接学习透明度α,而是学习它的分布参数(均值μ和方差σ)。
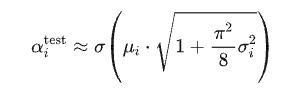
高不确定性区域(σ大),透明度更"柔和",模型主动抑制伪影
低不确定性区域(σ小),保持清晰结构
这个方法让模型知道自己"不知道什么"。知道哪里"看不清"的模型,比强行"看清"的模型更聪明。这项能力对于水下场景尤为关键------浑浊水域、背光区域、复杂纹理处,UAOO都能有效减少错误重建。
实验结果:全面超越
R-Splatting在SeaThru-NeRF和自建的BlueCoral3D数据集上进行了验证:
|
模型
|
PSNR↑
|
SSIM↑
|
LPIPS↓
|
| --- | --- | --- | --- |
|
原始3DGS
|
22.81
|
0.810
|
0.278
|
| R-Splatting | 24.67 | 0.820 | 0.277 |
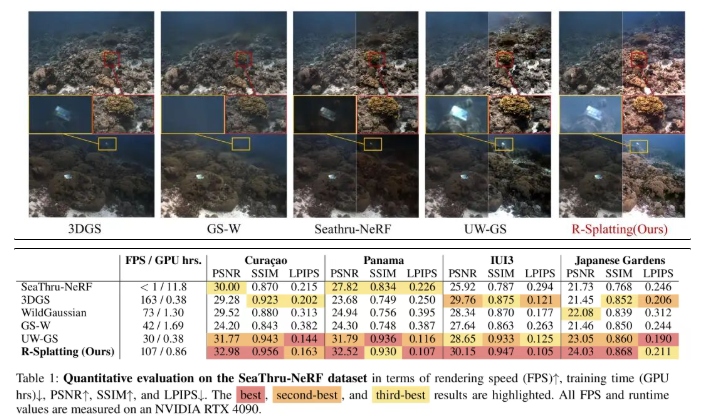
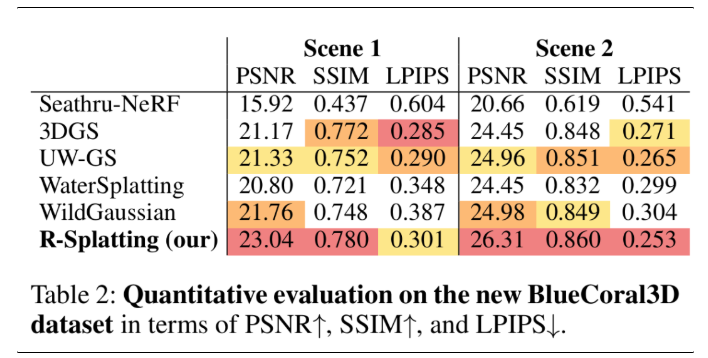
在PSNR、SSIM、LPIPS三大核心指标上全面领先,且保持了与原始3DGS相当的实时渲染速度。

三、R-Splatting给3DGS带来的行业价值
这项技术不是"学术玩具"。论文明确指出了三个应用方向:
水下考古:对沉船、水下遗址进行高保真数字化存档和线上展示
海洋监测:珊瑚礁白化监测、海底地形变化追踪
远程勘探:让科学家在办公室就能"潜入"深海热泉、冷泉等极端环境
一个形象的比喻:如果说陆地上的3D重建是在"高清直播",那水下重建就像是在"信号干扰严重的区域解码一档加密节目"。R-Splatting相当于把"加密节目"解码成了高清画面。

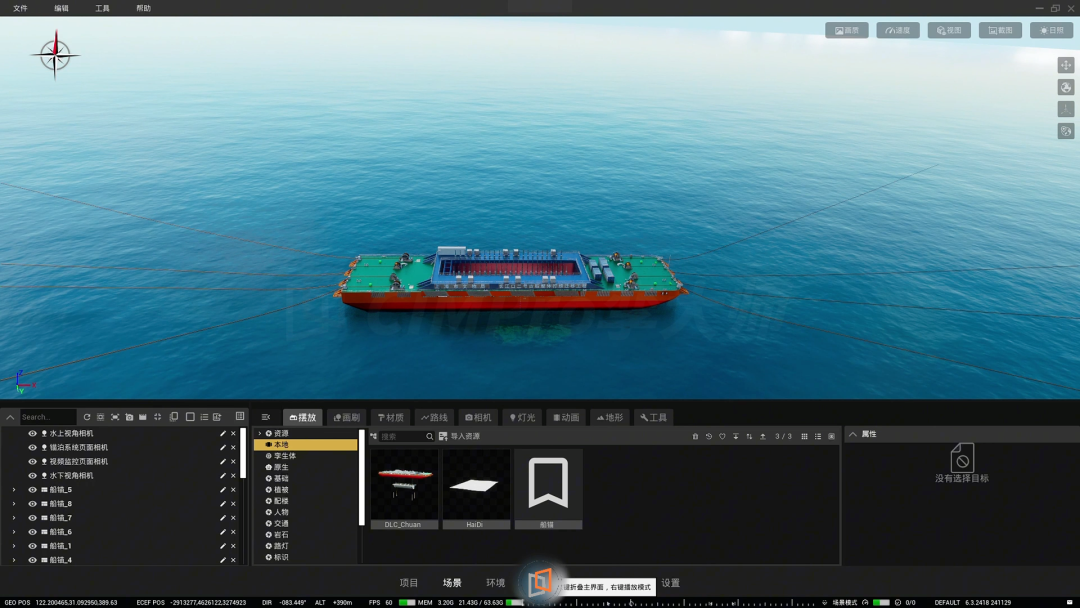
四、CIMPro孪大师:让水下3DGS从论文走向工程
学术突破令人振奋,但真正的价值在于工程化落地。
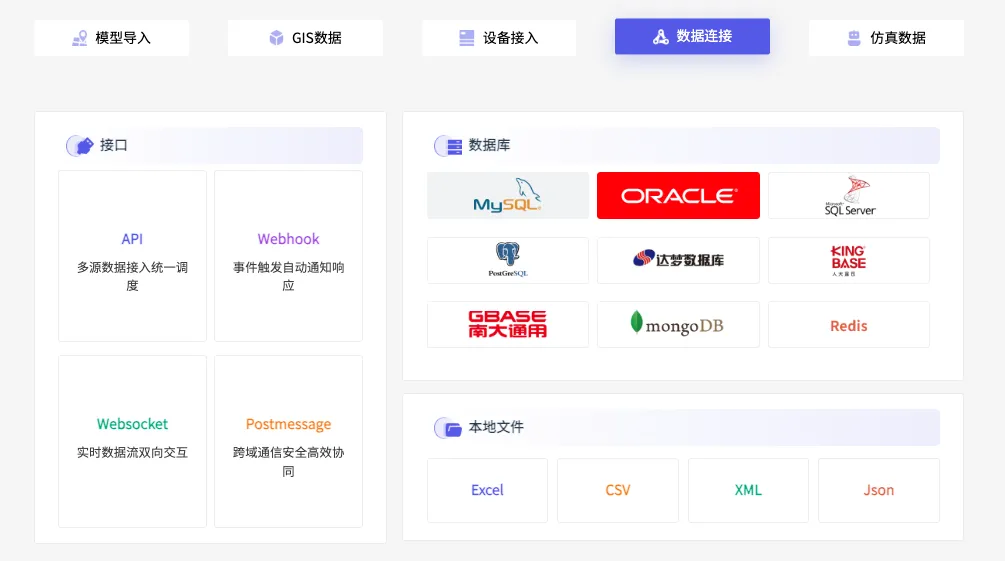
CIMPro孪大师作为国产零代码数字孪生平台,已经在船舶海洋领域完成了多项与水下3DGS相关的能力布局:
01 支持3D高斯模型导入与编辑
CIMPro孪大师已实现3D高斯泼溅模型的直接导入与场景编辑。用户可将R-Splatting等技术生成的水下3DGS模型,一键导入孪大师平台,进行材质调整、场景融合、交互配置。
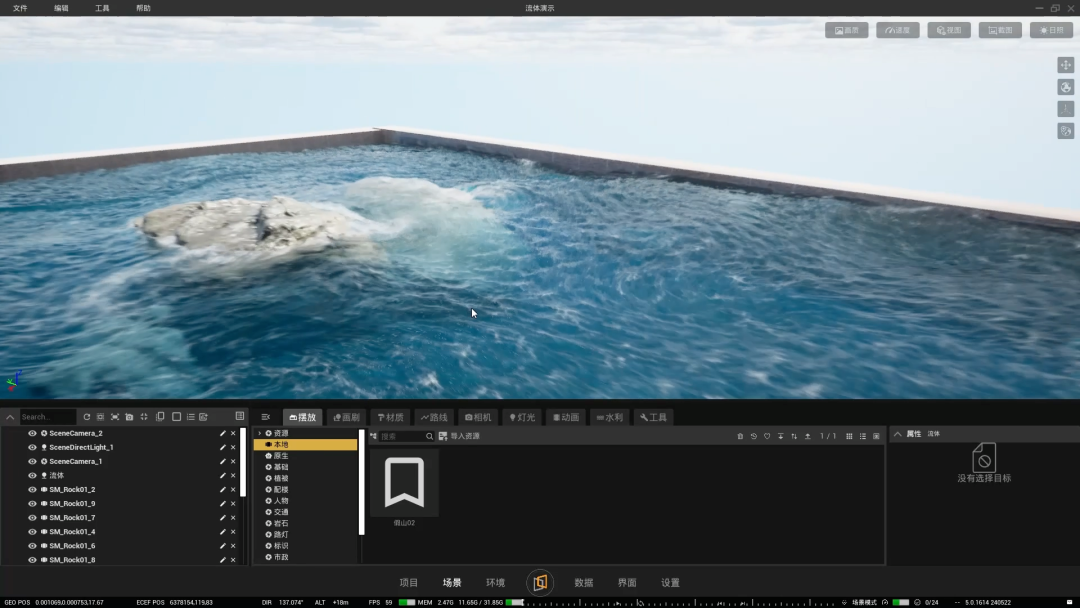
02 水下环境构建与高保真渲染
海底地形雕刻与材质编辑:支持对海底地形进行个性化编辑(提升、挖掘、平滑、压平),可添加珊瑚、岩石等多种水下材质,还原真实水下场景。
多源数据融合:可结合声呐数据、GPS数据、DEM高程图,精确刻画水下地形起伏,构建高仿真度的水下场景。
水下视觉仿真:支持调节海底雾效参数,模拟水下光线衰减、能见度变化等真实视觉效果;支持8K分辨率实时渲染,还原水下光影与材质细节。
内置模型库:平台内置浮标、灯塔、暗礁、水下障碍物等海战场景模型库,支持导入自定义水下设施模型。
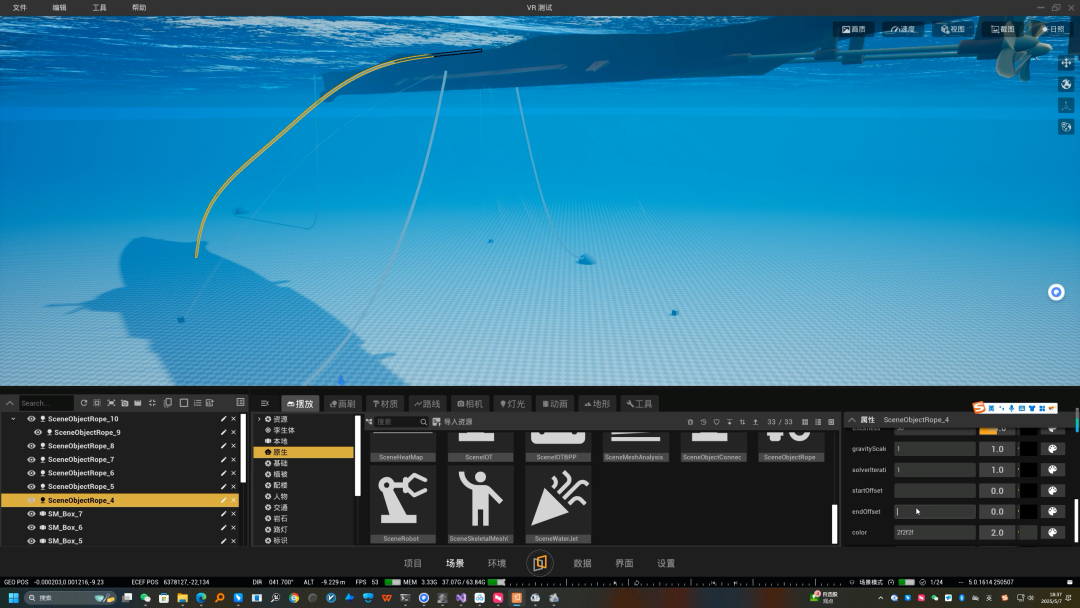
03 水下物理仿真与动态模拟可视化
水体物理模拟:结合水动力物理引擎,模拟水下洋流、水流对物体的影响;可自定义波浪形态(频率、振幅),实时模拟可视化不同海况下的水下运动响应。
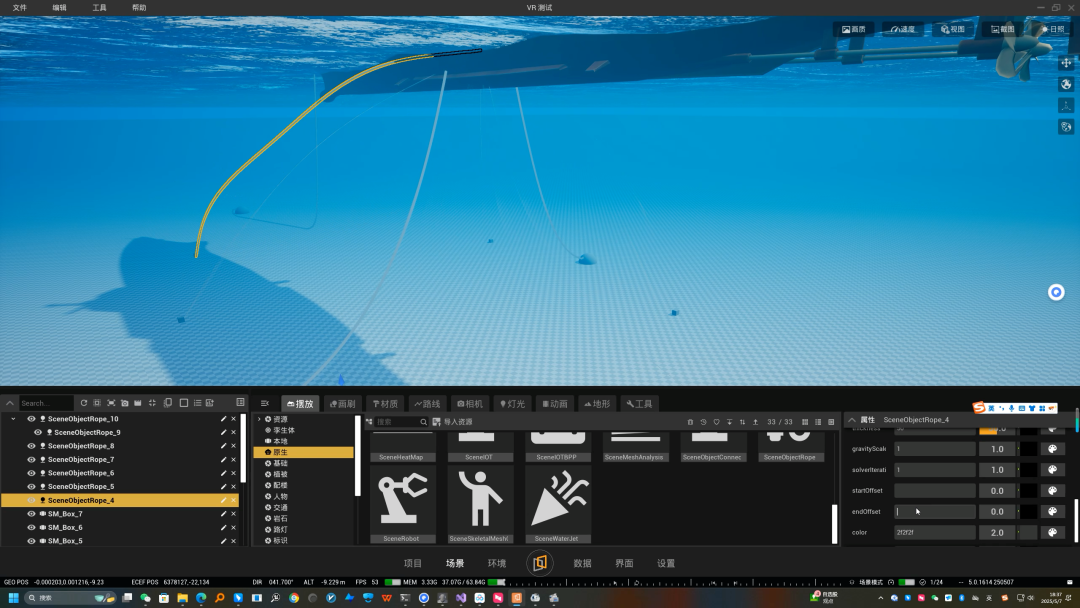
绳索动力学仿真:新增绳索动力学组件,可模拟可视化缆绳、钢索等柔性体在水下的拉伸、摆动及断裂效果,适用于拖曳声呐、水下打捞等场景。
流体仿真:模拟真实的水体效果,如波纹、流动、水位变化等。
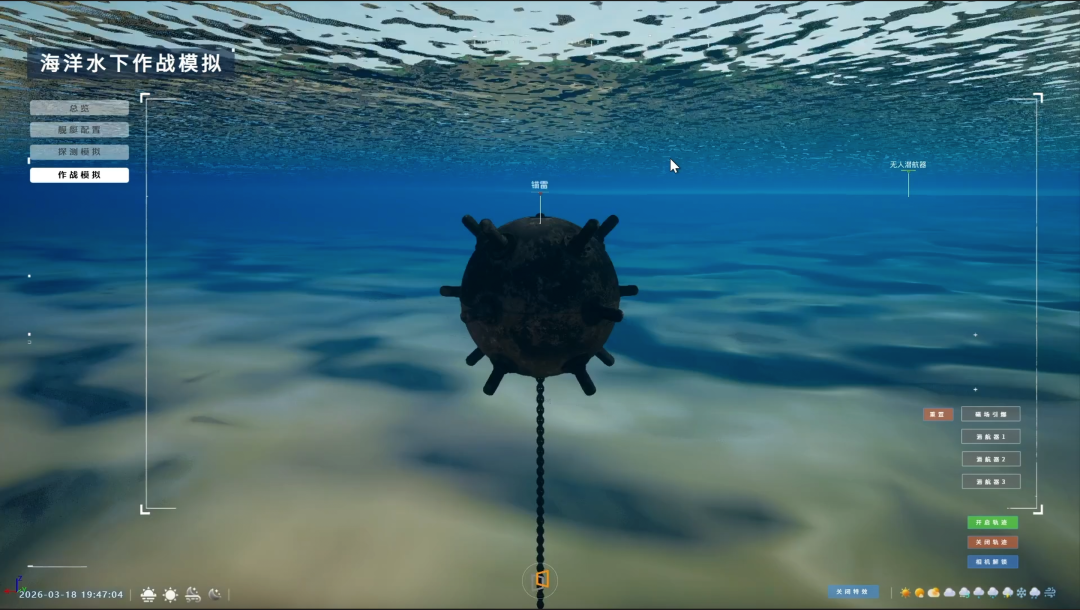
04 水下作战模拟可视化与场景构建
在军事仿真可视化与船舶海洋领域,CIMPro孪大师支持:
-
水下地形与声呐探测数据的三维可视化
-
潜艇、水下探测器等装备的高精度建模与路径推演可视化
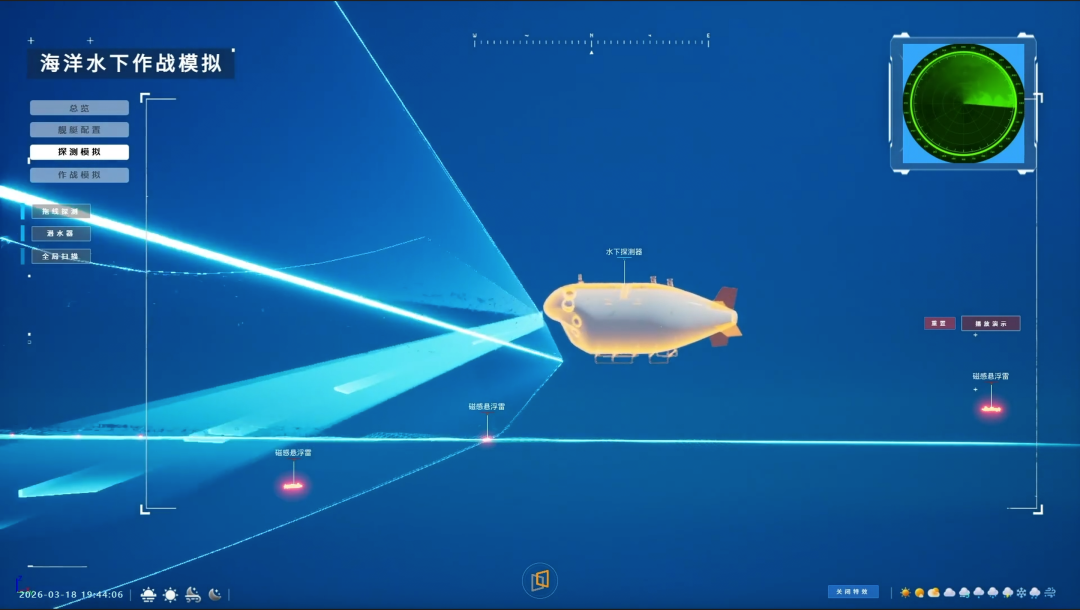
-
鱼雷弹道模拟可视化、反潜作战三维沙盘
-
海底雾效参数可调,模拟不同水深条件下的视觉效果
3DGS技术的高保真渲染能力,可让"水下战场"从抽象的符号变成"眼见为实"的沉浸式环境。
05 水下打捞与应急救援可视化
在海洋工程领域,CIMPro孪大师已应用于:
- 沉船打捞方案的预演与推演可视化



- 水下机器人作业路径的三维模拟
- 落水货物漂移轨迹追踪与打捞方案优化


- 模拟可视化水下管道、缆绳的受力分布与物理行为
结合3DGS重建的水下地形与残骸模型,决策者可在虚拟环境中"预演"整个打捞流程,减少现场试错成本。
06 与其域创新的联合:软硬件一体
其域创新(XGRIDS) 是国内领先的空间智能与三维重建硬件方案提供商,其Lixel系列手持激光雷达、灵光L2 Pro等设备可实时采集高精度水下/水上点云数据。
CIMPro孪大师与其域创新已形成"采集→重建→编辑→交付"的完整链路:
|
环节
|
能力
|
| --- | --- |
| 采集 |
其域创新硬件采集水下/水上点云、图像数据
|
| 重建 |
3DGS算法(含R-Splatting类技术)生成高保真水下模型
|
| 编辑 |
CIMPro孪大师导入模型、搭建场景、配置交互
|
| 交付 |
对接业务数据,交付可交互的数字孪生应用
|

CIMPro孪大师不仅支持R-Splatting等前沿3DGS算法的模型导入与编辑,更在地形构建、视觉渲染、物理仿真、行业应用四个层面提供了完整的工程化支撑------让水下3DGS真正从论文走进项目。

水下3D高斯泼溅技术,正在经历从"实验室新奇"到"行业刚需"的转变。而我们,正在把这个想象变成现实。