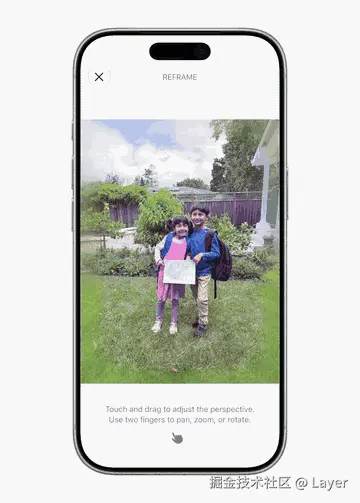
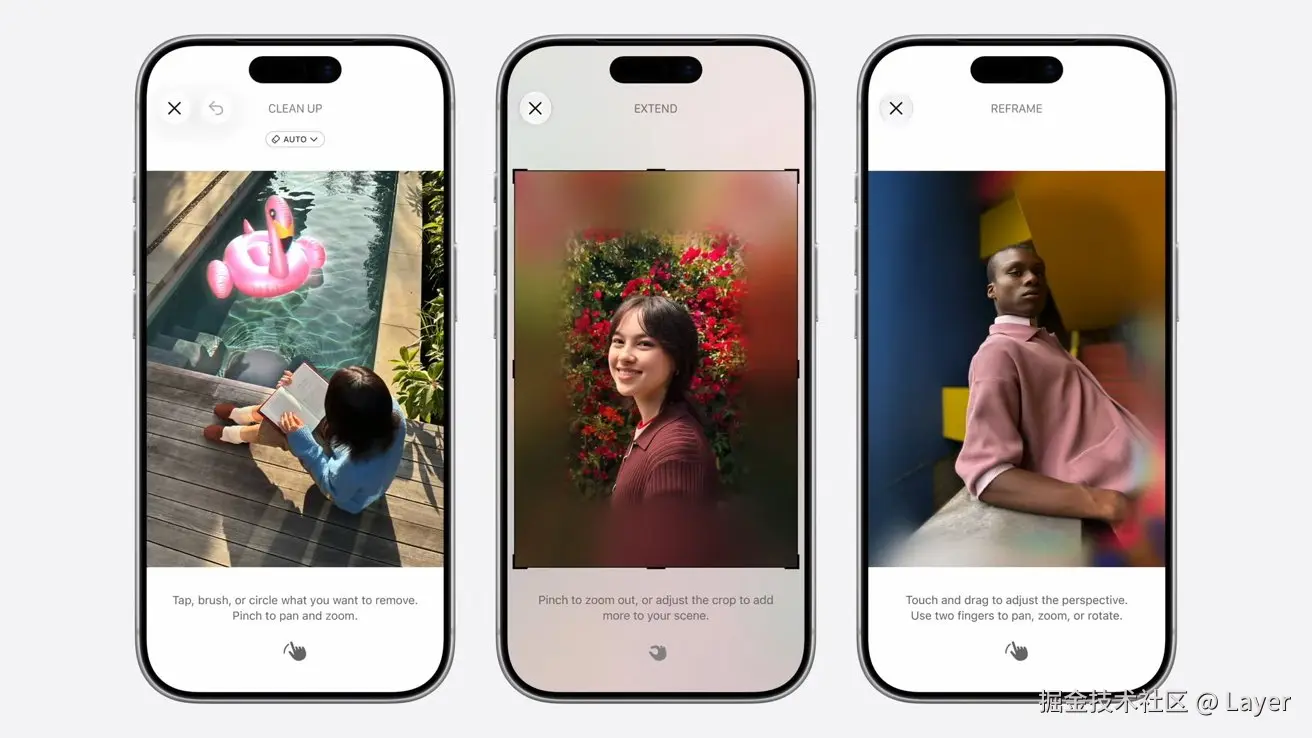
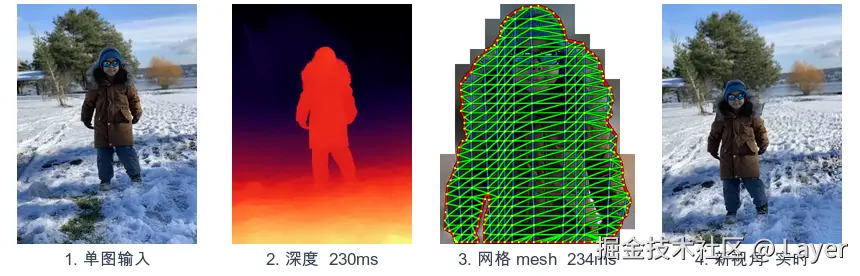
2026 年 6 月 8 日,WWDC26 上苹果发布了空间重构(Spatial Reframing):照片拍完之后,拖动画面重新选择机位,AI 实时补全新视角缺失的内容:
 |
 |
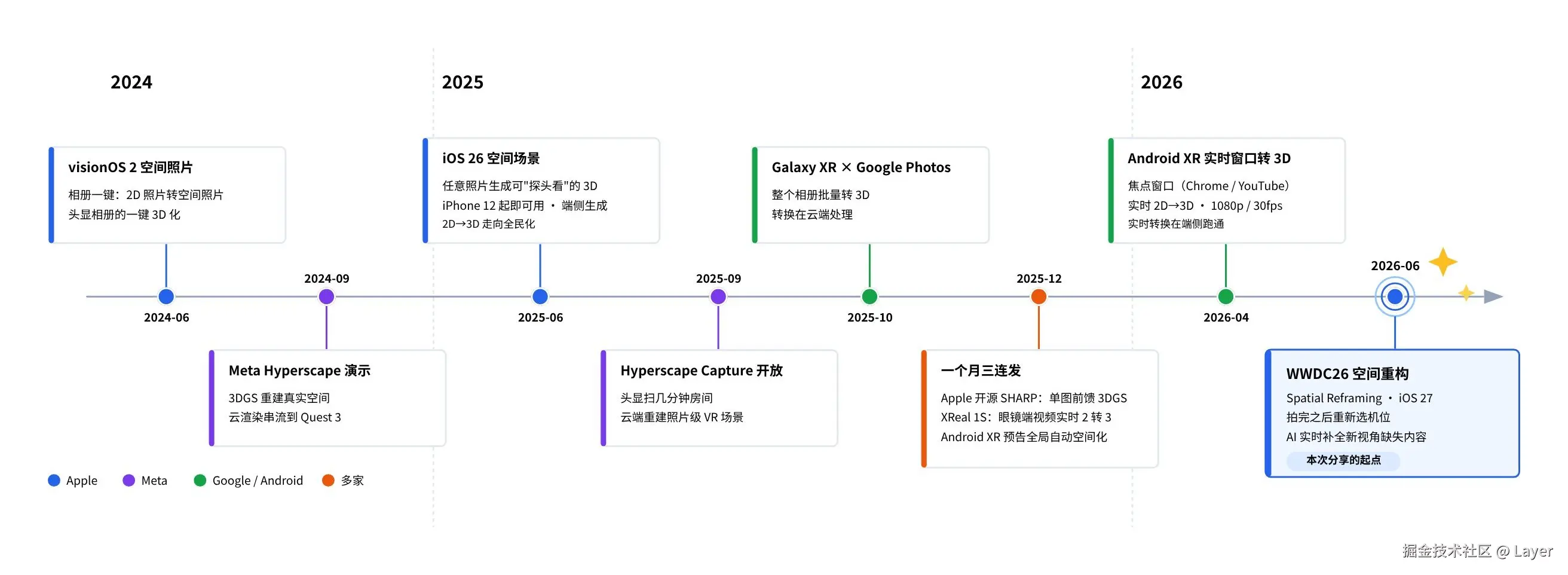
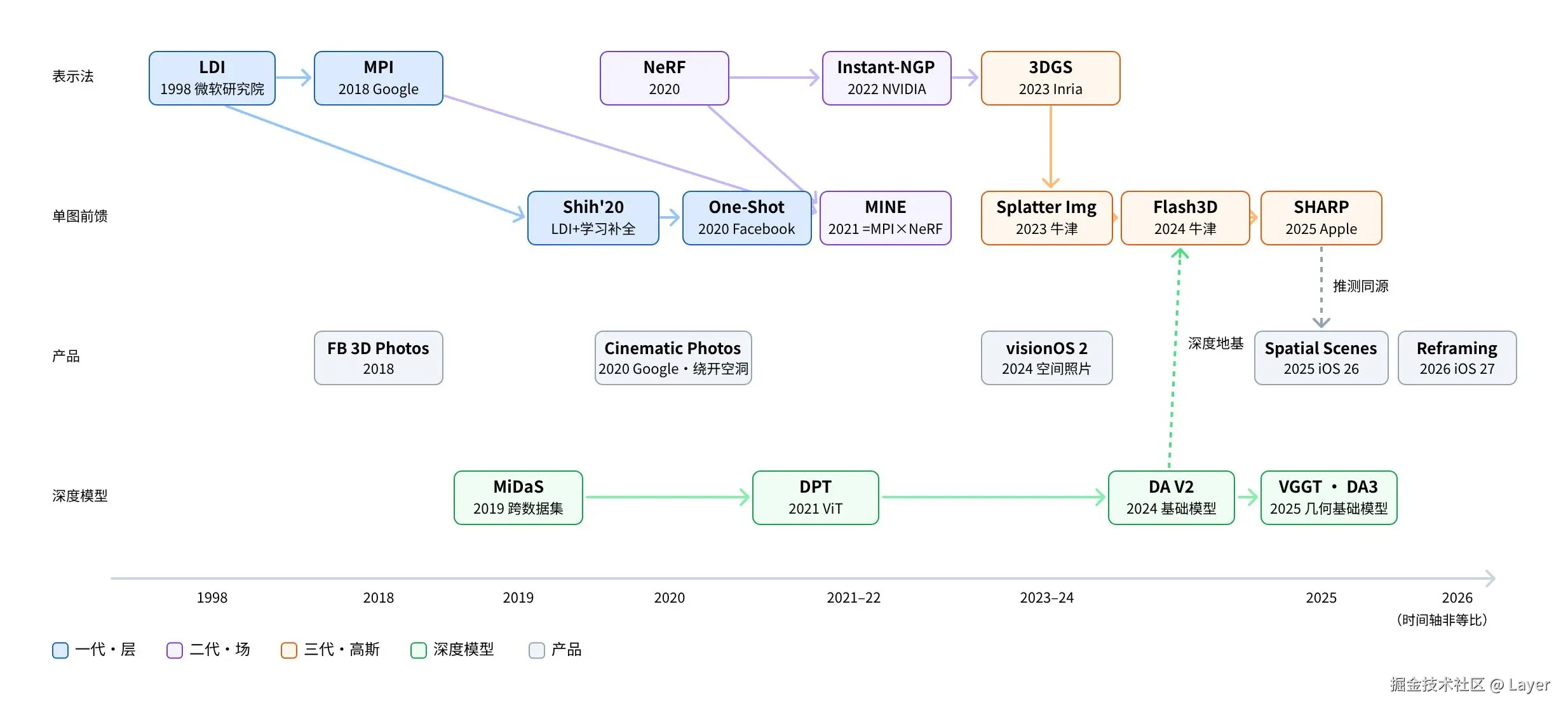
头部玩家在两年内相继入场,这背后是三项能力趋于成熟:
- 单目深度估计沉淀为基础模型 :无需双摄或激光雷达,仅凭一张普通照片推断每个像素的远近;过去这类模型更像"专用工具",换个场景就容易失准;2024 年前后,香港大学与字节跳动的 Depth Anything V2 的 25M 参数的 Small 版即能在手机上毫秒级出图;同期 ETH 的 Marigold 把 Stable Diffusion 里已经学到的视觉世界知识迁移出来做深度估计。深度估计开始变成大视觉模型里可以复用的通用能力;
- 3D 表示演化出端侧可实时运行的形态 :有了深度之后,还要把一张平面照片重新组织成"可换视角"的三维结构(分层、神经场、高斯泼溅等);Facebook 的 One Shot 3D Photography 以"单目深度网络 + LDI 分层 + 遮挡区域补全"把一张普通照片直接在手机端处理成 3D Photo,几秒内就能预览和分享;从 3D Gaussian Splatting 至 Apple SHARP 已经可以从单张照片一次前馈生成 3D Gaussian 表示,并在普通 GPU 上一秒内完成;
- 移动端与头显的 NPU 算力开始溢出 :NPU 是手机和头显芯片里专门加速神经网络的单元。过去这类 2D 转 3D 任务要么依赖云端,要么只能离线慢慢处理;现在端侧 NPU 的算力已经足够支撑深度估计、图像补全和实时预览。苹果芯片内置的 ANE(Apple Neural Engine)承载 iPhone 上的 iOS 26 空间场景,三星 Galaxy XR 所用的高通 Snapdragon XR2+ Gen 2(含 Hexagon NPU)支撑头显端实时转换,XReal 则以 自研 X1 芯片 驱动眼镜端的实时视频 2D 转 3D。
接下来,我们来看看一张普通照片是怎样被重新组织成可互动、可重构的新形态的。
1. 视差带来的立体感
构造视差
人脑通过双眼看到的画面差异来感知深度,这个差异就是视差(横向偏移)。所以 2D 转 3D 的本质,是构造出人眼能够感知的视差信号。
可以做一个很简单的实验:伸直手臂竖起拇指,交替闭上左右眼。你会发现,拇指会相对远处背景左右"跳动"。这是因为两只眼睛之间大约相隔 6cm,相当于从两个相邻机位各拍了一张照片;同一个物体在两张画面里错开的距离,就是视差。
视差大小由几何关系决定:观察点移动同样的距离,近处物体的画面位置变化更大,远处物体的变化更小。半米处的拇指会明显跳动,10m 外的背景几乎不动;如果把拇指收近一半,它的跳动幅度大约也会翻倍。即物体越近,视差越大;物体越远,视差越小。大脑正是利用这个规律判断远近。火车窗外近处电线杆飞快掠过、远处山体缓慢移动,本质上也是同一件事。
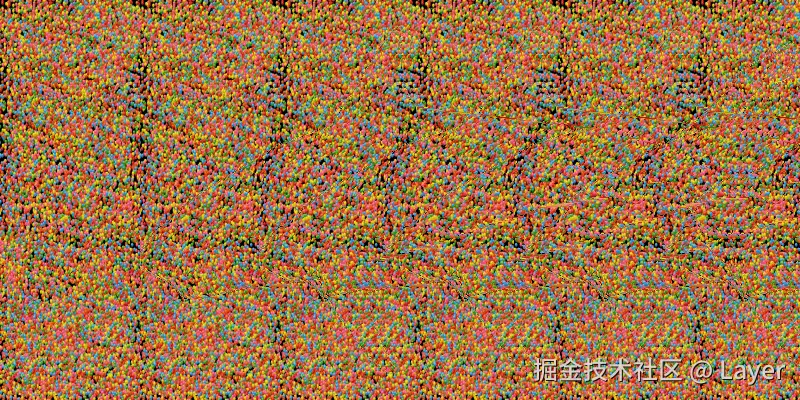
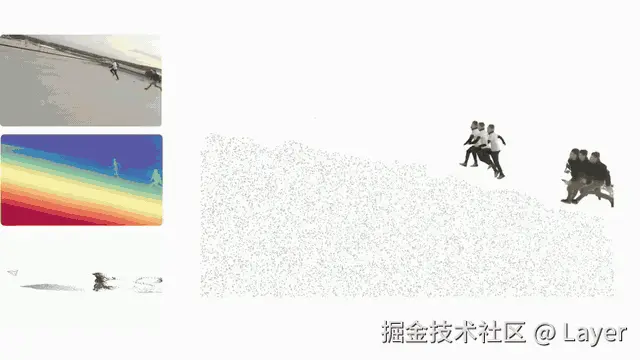
随机点魔眼图(Wikimedia Commons)是"立体感来自视差"的直接证据。图中没有轮廓、明暗和透视,只有随机噪点;但左右眼看到的点阵存在细微错位,大脑会把这种错位解释成深度,平行眼观看时便会浮现一只 3D 鲨鱼:
视差可以写成下面这个式子:
d=2tan(FOV/2)W⋅ZB
这里的 d 是视差,单位是像素。只由四个量决定:
- W 画面宽度(像素数):同样的方向差,画面像素越多,折算出的位移像素就越多;
- FOV 视场角(Field of View):画面覆盖的角度范围,越大越"广角"。决定立体感多夸张,不改变深度关系;
- B 基线(Baseline):两个观察位置之间的距离。双摄拍摄时,它是两颗镜头的间距;单图转 3D 时,它是算法虚拟出来的左右眼距离,通常按人的瞳距量级来设,常见约 63mm。
- Z,物体离相机的距离:照片里没有、需要 AI 去估算的数值。
对一张已经拍好的照片来说,画面宽度、视场角和基线基本都可以看作已知,真正缺的是每个像素的 Z:
视差 ∝ 1/Z,物体越近,视差越大。
于是,2D 转 3D 可以被拆成两个问题:
- 深度从哪来:也就是怎么从一张普通照片里估出每个像素的远近?(单目深度估计)
- 视差怎么渲染:拿到深度之后,怎么让近处移动得多、远处移动得少,并处理移动后露出来的空洞?
真正决定观感的往往是第二个问题。深度只能告诉我们"哪些像素该怎么动",但当前景让开之后,背后原本被挡住的内容并不存在于照片里。这个区域必须被补出来。各家 2D 转 3D 方案的差异,绝大部分是对这个空洞问题的不同解答。
消费方式
算出来的视差要交给显示系统让人眼感知,不同设备的做法不一样:
- 手机(单屏裸眼) :左右眼看到的是同一帧画面,不能直接提供双目视差,所以立体感主要来自运动视差。当用户倾斜手机或拖动画面时,陀螺仪和手势会驱动虚拟视点连续移动,近处移动得多、远处移动得少。也就是说,它用时间上的连续晃动,替代了双眼同时看到的空间差异。iOS 26 Spatial Scenes 就是这种形态。
- 头显(双目显示):设备可以在同一时刻分别给左右眼渲染两张略有差异的画面,双眼直接融合出立体感。Vision Pro、Galaxy XR、XReal 这类设备都属于这个形态。
 |
 |
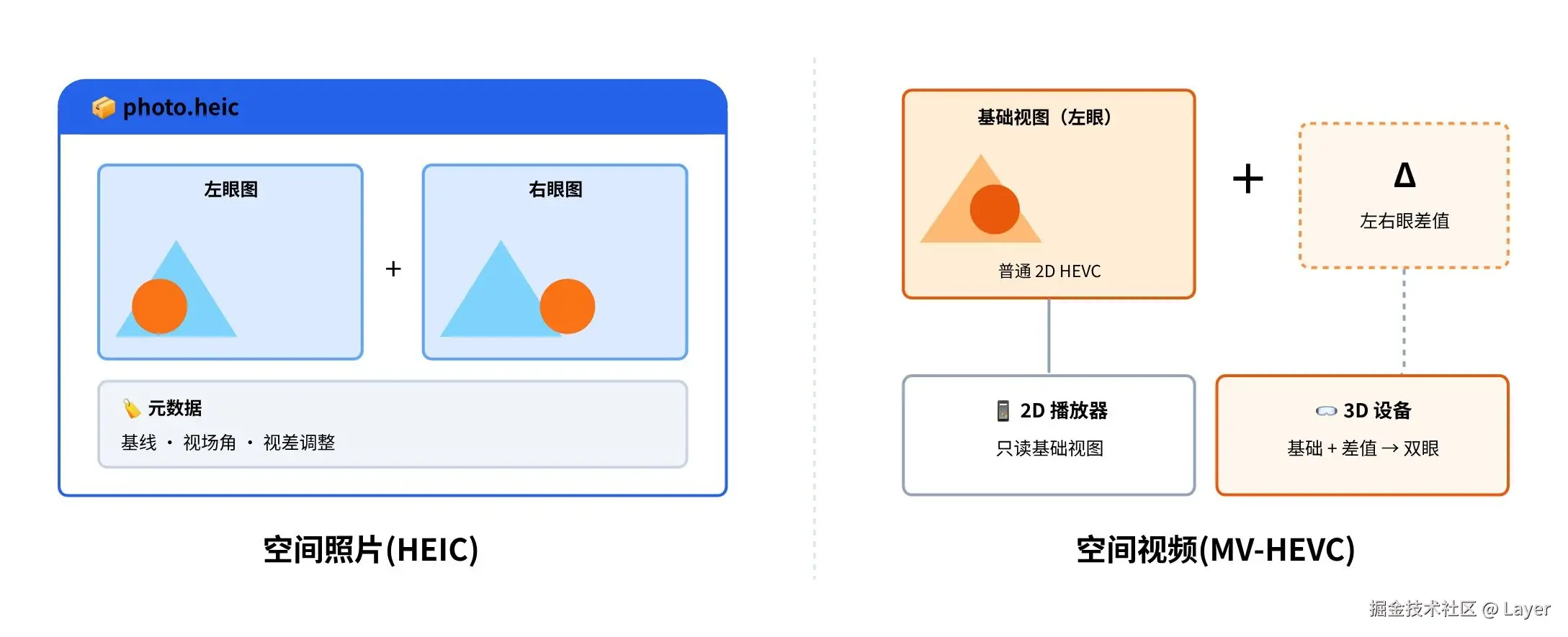
载体格式也随显示方式发生分化:
- 空间照片:本质是一组左右眼图像,也就是一个"立体对"。苹果会把这组图像封装进一个 HEIC 文件中。HEIC 是苹果常用的高效图片格式,基于 HEVC 编码,一个
.heic文件里可以容纳多张图像;空间照片还会额外写入空间元数据,比如基线、视场角和视差调整参数。苹果在 WWDC24 中就是按这套方式定义空间照片的。 - 空间视频 :通常使用 MV-HEVC,也就是 Multi-View HEVC,HEVC/H.265 的多视图扩展。它会把左右眼两路画面编码进同一个视频文件里:普通 2D 播放器只读取基础视图,仍然能当普通视频播放;支持 3D 的设备则读取额外的视差信息或另一视图,还原出双目画面。
从 iPhone 15 Pro / 15 Pro Max 开始,苹果可以利用主摄和超广角两颗镜头直接拍摄空间视频,相当于在拍摄阶段就获得左右眼两路画面,属于"双目直拍"。但这次分享关注的"单目转换",与此目标不同。
 |
 |
2. 表示 3D 的方式
LDI、MPI(1998--2022)
先理解两个核心概念 LDI 和 MPI,它们都属于"分层表示",区别在于怎么分层、内容存在哪里:
- LDI(Layered Depth Images,分层深度图):普通图片的一个像素位置只存一个颜色;LDI 允许同一个像素位置存多张带深度标签的"小卡片"。第一张通常来自原图中可见的像素;如果前景背后还有墙、树、天空这类被遮挡内容,单图 2D 转 3D 里就需要结合深度估计、主体分割和图像补全,把这些内容推断出来,再作为更后面的卡片存进去。这样当主体在新视角下让开时,后面那层内容就能露出来,而不是直接变成空洞。
- MPI(Multiplane Image,多平面图像):可以理解为先在相机前方放一组固定深度的平行透明平面,典型做法大约是 32 层;再由网络或算法根据输入图像,为每个平面预测一张 RGBA 图。原图中可见的内容会根据深度分配到对应平面;被前景挡住、但换视角后可能露出的区域,也需要通过补全预测出来。换视角时,每个平面按自己的深度重新投影:近处平面移动更多,远处平面移动更少,最后从远到近透明叠加,形成视差和立体感。
**一句话总结,**LDI 是"沿着每条视线往里存多层内容",MPI 是"把整张图的内容分配到一组全局共享的深度平面上"。渲染新视角时,两者都会把这些内容重新投影到屏幕上。
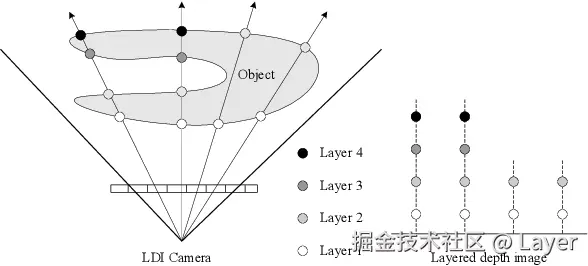 LDI:左侧 LDI Camera 沿每条视线穿过物体、记录命中的多层像素(Layer 1--4),右侧即这些像素按深度堆成的 Layered Depth Image(Shade et al., SIGGRAPH'98) LDI:左侧 LDI Camera 沿每条视线穿过物体、记录命中的多层像素(Layer 1--4),右侧即这些像素按深度堆成的 Layered Depth Image(Shade et al., SIGGRAPH'98) |
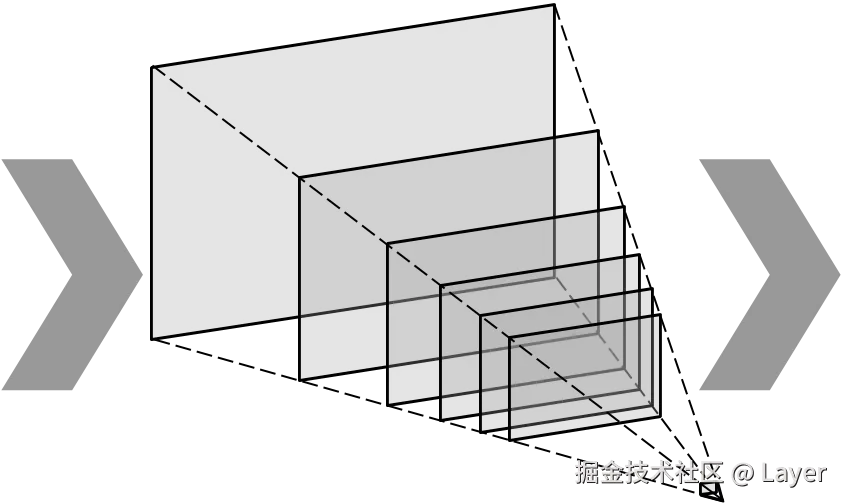 MPI:一摞带透明度的 RGBA 平面;新视角 = 每层按透视变形后,由远及近半透明叠加。生成慢、渲染快。(Single-View MPI) MPI:一摞带透明度的 RGBA 平面;新视角 = 每层按透视变形后,由远及近半透明叠加。生成慢、渲染快。(Single-View MPI) |
分层的世界观:3D 照片 ≈ 2.5D。通俗地说,它有点像"纸片人剧场":近景、中景、远景被拆成几块前后错开的布景板,观众左右晃头时,不同布景板移动的幅度不同,于是产生立体感。它只为"小幅度换视角"准备刚好够用的层。优点是可以一次性预计算好,用传统光栅化渲染,手机上很容易做到实时;但视角一旦拉得太大,就容易出现纹理拉伸、层间接缝和补洞穿帮。
分层路线真正绕不开的问题,是"主体背后是什么"。当前景被挪开时,原图里被挡住的内容并不存在。Google Cinematic Photos(2020)和 Apple 后来的 Spatial Scenes / Spatial Reframing,给出了两种不同取舍:前者更像是绕开问题,通过优化虚拟相机轨迹,把拉伸和空洞尽量藏在不显眼的位置;后者则选择正面处理,把新视角中露出的缺失区域补出来。
但 Cinematic Photos 不属于严格的 LDI/MPI,但属于同一代"深度驱动 2.5D"路线:它不是 LDI/MPI,而是"单目深度图挤出的纹理 Mesh + 相机轨迹优化",不显式补出主体背后的多层内容,而是让镜头运动避开最明显的拉伸破绽。
 Camera 3D model courtesy of Rick Reitano(Google Research) Camera 3D model courtesy of Rick Reitano(Google Research) |
 拉伸伪影可视化:相机一偏离正视角,深度断裂处被拉伸的多边形就会显形 拉伸伪影可视化:相机一偏离正视角,深度断裂处被拉伸的多边形就会显形 |
这一代里最该单独点名的是 One Shot 3D Photography(Kopf et al., Meta,2020),走的是 LDI 路线。它第一次把"单图变 3D 照片"的完整链路做成了手机端产品:先用轻量深度网络估出深度,再把照片转换成 LDI,补齐视差会露出的遮挡边缘,最后预计算成纹理图集和网格,交给手机 GPU 实时渲染。整件事几秒完成、全程离线,证明了单图 3D 照片不必依赖云端,也不必依赖双摄:
NeRF (2020--2023)
如果说 LDI 和 MPI 是把场景拆成"纸片"或"玻璃片",NeRF(Neural Radiance Fields,神经辐射场)则换了一种更激进的思路:它不再直接保存图片、网格或一层层平面,而是把一个场景训练进一个神经网络里。
可以把 NeRF 理解成一个"记住了某个房间的函数"。你给它一个 3D 坐标,再告诉它从哪个方向看,它就回答两个问题:这里应该是什么颜色?这里有多像实体、会不会挡住后面的光?
网络输出的是颜色 RGB 和密度 σ。这里的密度可以先粗略理解成"这一点有多实":σ 越大,说明这里越像有物体,越会遮挡后面的内容;σ 越小,说明这里更接近空气,光线可以穿过去。渲染一张图时,每个像素都会从相机发出一条光线,系统沿着这条光线采样很多个点,再把这些点的颜色和密度从近到远累积起来,最后得到这个像素的颜色。
这就是"辐射场"的含义:空间中的任意位置、任意观看方向,都可以被查询出颜色和密度。它的优势很明显:场景不再是几张离散纸片,而是一个连续的 3D 空间,所以新视角质量很高,细碎结构、透明感和随视角变化的光泽也更自然。它证明了,连续场可以用照片级质量表示真实 3D 场景。

Instant-NGP 证明可以靠哈希编码和 GPU 工程把训练压到分钟甚至秒级
但 NeRF 的原始形态并不适合"相册里点一张照片,马上生成 3D"。它通常需要多张带相机位姿的照片,每个场景都要单独训练;渲染时又要对每个像素、每条光线、每个采样点不断查询网络,计算量很大。NVIDIA 的 Instant-NGP 通过多分辨率哈希编码,把训练和渲染速度大幅拉快,证明这条路线可以被工程加速;但内容仍然藏在网络参数里,渲染仍然绕不开大量查询。
所以,NeRF 这一代对消费级单图 2D 转 3D 的直接贡献有限,但它留下了一个非常重要的观念:3D 表示不一定只能是图片层或网格,也可以是一个可连续查询的空间场。
字节跳动与新加坡国立大学的 MINE 可以理解成 MPI 和 NeRF 之间的过渡形态:不是传统 MPI,也不是原始 NeRF。传统 MPI 会预先设定一组固定深度,比如 32 个平行平面,然后一次性预测这 32 张 RGBA 图。它的问题是,场景只能被放在这些离散层上,深度表达比较粗。MINE 保留了 MPI "按深度生成平面"的思路,但把固定层改成了连续查询:你不再只能取第 1 层、第 2 层、第 32 层,而是可以给它任意一个连续深度 z,让网络生成这个深度位置上的一张 (RGB, σ) 平面。
所以 MINE 的意义在于它把 MPI 里离散的"层",推进成了可以连续查询的"场";但它又不像原始 NeRF 那样对每条光线逐点查询,而是仍然保留了平面化、前馈生成、便于补遮挡区域的产品友好形态。
3D Gaussian Splatting(2023--)
3DGS 换了一种更适合实时渲染的场景表示方式:它不再像 NeRF 那样把场景隐含在网络参数里,而是用大量带有位置、形状、颜色和透明度的 3D 高斯"小雾团"来近似真实世界。
渲染时,GPU 会把这些小雾团投影到屏幕上,变成一个个半透明的椭圆斑点,再按深度顺序进行透明叠加。这样一来,它能保留接近 NeRF 的画质,但不必在每个像素、每条光线上反复查询神经网络,而是回到 GPU 擅长的显式绘制流程,因此可以做到实时渲染:
 |
 |
但它的代价主要在存储。一个真实场景往往需要百万级高斯,未压缩文件可能达到几十到几百 MB。因此,3DGS 要真正落到端侧,核心工程问题是"怎么把这些高斯剪枝、量化和压缩到设备能接受的规模"。
| Meta 在 Connect 2024 上演示了 Hyperscape:用 3DGS 将真实空间重建成可以走进去的照片级场景,再通过云端渲染串流到 Quest 3。到 2025 年,Meta 又开放了 Hyperscape Capture(Early Access):用户只需要戴着头显扫描几分钟房间,云端经过数小时重建,就能把自己的客厅变成可分享的 VR 场景。 不过,它和 NeRF 时代的很多方案一样,仍然依赖多视角采集和逐场景重建。 |  |
| 影视飓风有一个相关视频,它展示的不是普通静态 3DGS,而是 4D Gaussian Splatting / 4DGS。3DGS 里的"3D"指三维空间,它重建的是某一时刻的静态场景,观众可以在这个空间里自由换角度看;4DGS 则在三维空间之外加入时间维度,场景里的人、物和光影会继续运动,观众既能自由换视角,也能看到动作随时间发生。换句话说,3DGS 让照片级空间可以被自由运镜,4DGS 则把这种能力推进到视频级时空,让"正在发生的画面"也可以被自由运镜。 |  |
3. 深度估计模型
上面几种表示法虽然形态不同,但都要先知道画面里每个像素大概离相机有多远。所以 2D 转 3D 这两年的进展,还有一条不那么显眼、但非常关键的暗线:单目深度估计终于变得更通用、更稳定。
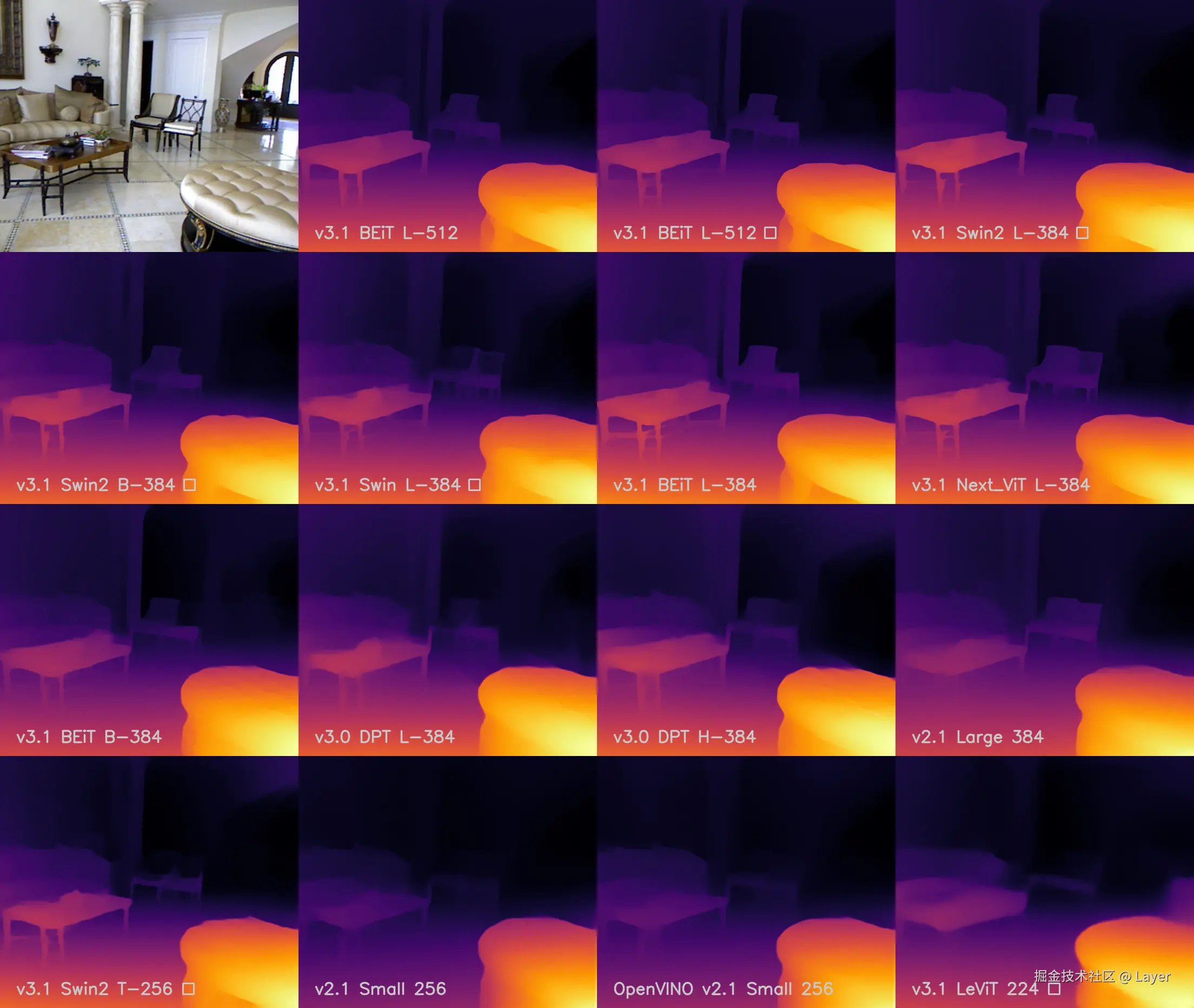
早期的单目深度估计很挑照片。模型在熟悉的数据集里效果不错,换一种光线、换一种构图,或者遇到没见过的物体,就容易把远近判断错。MiDaS 和 DPT 这类工作先把目标放宽了一步:不急着估出"这个人离镜头 1.8 米"这样的绝对距离,而是先把相对远近排对,也就是判断谁更近、谁更远。再把不同来源的数据混在一起训练,模型就开始具备了"多数照片都能大致看懂远近"的泛化能力。
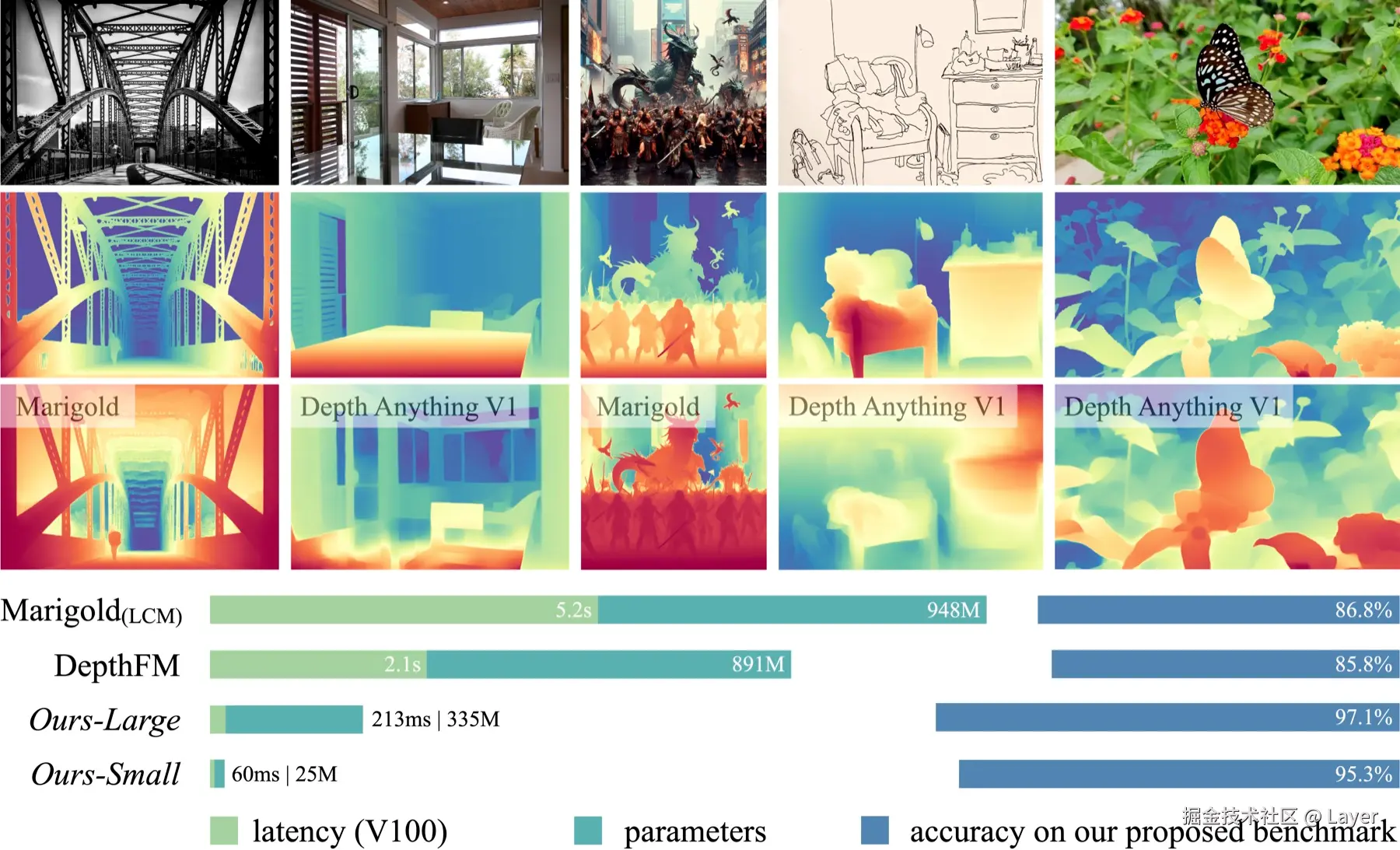
让产品更好的是 Depth Anything V2。它的训练方式更适合做成通用能力:先用大量合成图把一个大模型教得很强,再让这个大模型给真实照片自动标出深度答案,最后把能力压缩到小模型里。结果就是边缘更细、换照片更稳、模型体积也能压下来。V2 Small 只有 25M 参数,转成 Core ML 后几十 MB,已经足够作为手机端的轻量前处理步骤。
 |
 |
再往后,深度估计开始从"单张图里的远近排序",走向更完整的空间理解。Depth Pro 强调的是米制深度 ,也就是不只判断谁近谁远,而是尽量估出接近真实世界的距离。VGGT 和 Depth Anything 3 则进一步把问题扩展到整体几何:不仅预测深度,还尝试一次性推断相机位置、画面中各点的 3D 坐标,以及这些点在多帧之间如何运动。也就是说,深度估计正在从一个前处理模块,变成更通用的几何理解能力。
4. 技术原理
照片级 2D 转 3D 产品,可以理解成两段:先离线生成一份可渲染的 3D 资产,再在预览时实时改变观察角度。用户选中照片后,系统先完成深度估计、分层组织和遮挡补全;等用户倾斜手机或拖动画面时,GPU 只根据新的视角快速重绘:
- 深度估计:给照片生成一张深度图,判断哪些地方近、哪些地方远。对手机 3D 照片来说,通常不需要精确到真实米制距离,只要相对远近稳定,就能让近处移动得多、远处移动得少,形成视差;
- 组织结构:一张普通照片本来只是一个平面,不能从侧面看。系统需要根据深度,把主体、中景和背景拆开,或转换成图层、网格、高斯等可重新投影的表示,让它具备小幅换视角的能力;
- 遮挡补全:前景让开后,背后原本被挡住的内容并不存在于照片里。如果不补,就会出现空洞或纹理拉伸。手机 3D 照片的视差通常不大,要补的是主体轮廓旁露出的一圈窄带,包括颜色、深度;
- 实时渲染:前三步完成后,照片已经变成一份可交互资产。预览阶段,GPU 根据手势或陀螺仪重新投影这些图层或网格:近处移动多,远处移动少;主体边缘切开后,露出的就是补好的背景。
回到标题"空间重构",它把这条流程推到更大的视角变化下使用。机位挪得越大,被推出画面、被前景遮住后重新露出的区域就越多,因此更依赖补全能力。难点是是如何让补出的颜色和深度自然接回原场景。
需要说明的是,Apple 目前并没有公开 Spatial Reframing 的具体实现细节。但从官方描述看,它解决的问题和一批公开研究高度一致:先从单张照片理解深度和空间结构,再根据用户拖动后的新机位生成新视角,最后只在新视角露出的缺失区域补内容。早期的 3D Ken Burns Effect 已经展示了"单图估深度、生成点云、移动虚拟相机、补齐露出区域"的完整链路;3D Photo Inpainting 则把问题进一步落到 LDI 分层和遮挡区域的颜色、深度补全;再往后,Diffuse3D、Stable Virtual Camera 这类工作开始用扩散模型处理更大视角变化下的新视角生成。Spatial Reframing 可以看作这条研究路线在照片编辑产品里的落地。
 |
 |
 |
3D Photography Using Context-Aware Layered Depth Inpainting
5. 从语言到 Demo
AI Coding 让"从想法到产品雏形"的距离变短了,去年我尝试做类似项目,花了一个月只有粗糙雏形;今天只靠自然语言描述目标、配合 AI 自动反馈效果,就能在很短时间里把深度估计、遮挡补全和 Metal 渲染串成一个可交互 Demo。这大概就是属于工程师的 Demo 平权时代。
但 Coding 不只是为了得到一个结果,它本身也是理解问题的过程。就像 AI 可以替我们总结一本书,但亲自读一本书,你会在停顿、困惑、反驳和联想里形成自己的判断。写代码也是一样,AI 可以帮你更快跑通 Demo,但过程里暴露出来的取舍、错误和修正,才真正让你理解一个系统。
我们需要保留这种亲自探索的能力,塑造自己的判断,此文即由此而来。
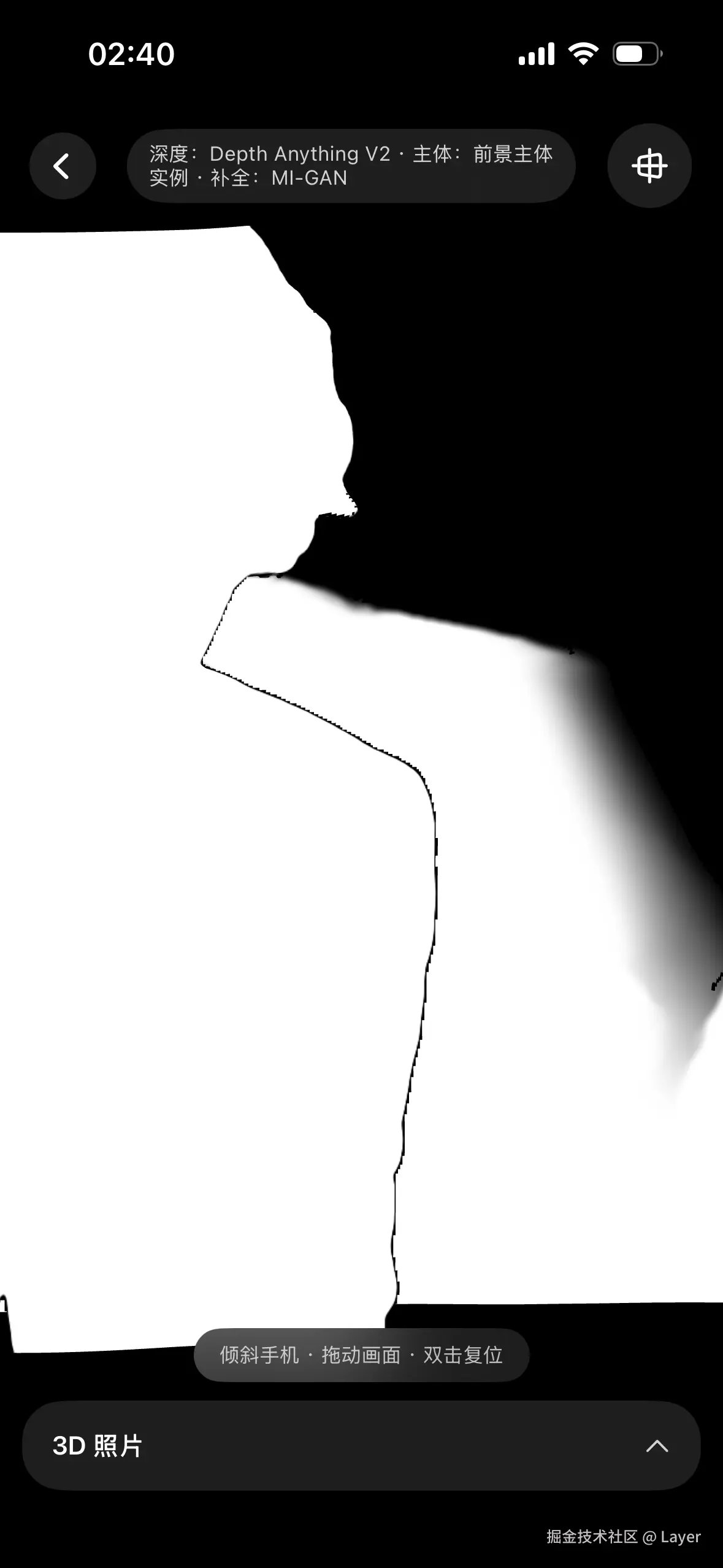
以下是 Arcus (GitHub),一个纯端侧 iOS 2D 转 3D 照片 Demo,技术路线接近 LDI;它先用 Depth Anything V2 Small 做单目深度估计,再用 Vision 前景分割拆出主体和背景,对遮挡区域用 MI-GAN / LaMa / PatchMatch 做补全,最后把前景、背景和深度做成可由 Metal 实时视差渲染的分层资产。最后也感谢模特蔡徐坤。
| 原图 | 深度 | 主体 | 背景 | 空间照片 | 空间重构 |
|---|---|---|---|---|---|
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
6. 参考资料
官方 / 产品
- WWDC26 Spatial Reframing:Apple Newsroom · AppleInsider
- iOS 26 / visionOS 26 Spatial Scenes:iOS 26 Newsroom · visionOS 26 Newsroom · RealityKit ImagePresentationComponent
- visionOS 2 空间照片:Newsroom
- Google Photos Cinematic Photos:发布公告 · 技术博客
- Galaxy XR / Google Photos 空间化:Google 官方 · 帮助页(云端处理)
- Android XR autospatialization:预告(2025-12) · 实时窗口转 3D 落地(2026-04)
- Meta Hyperscape:Connect 2024 官方回顾 · Hyperscape Capture(TechCrunch)
深度估计
- MiDaS:arXiv 1907.01341 · DPT:arXiv 2103.13413
- Depth Anything V2:arXiv 2406.09414 · Apple 官方 Core ML 转换
- VGGT(CVPR'25 最佳论文):arXiv 2503.11651 · GitHub
- Depth Anything 3(字节 Seed):项目页 · arXiv 2511.10647
- Marigold(CVPR'24):项目页 · RollingDepth(CVPR'25):项目页
- Apple Depth Pro:arXiv 2410.02073 · GitHub
补全 / 渲染 / 端侧
- LaMa(WACV'22):arXiv 2109.07161
- MI-GAN(ICCV'23):CVF Open Access · GitHub
- MetalSplatter(iOS 3DGS 渲染):GitHub
- 高通 QNN(HTP/NPU 运行时):文档
- 趣味延伸:Autostereogram · Wiggle stereoscopy · Chromostereopsis
相关研究工作
| 工作 | 年份/机构 | 内容 | 链接 |
|---|---|---|---|
| LDI、MPI(1998--2022) | |||
| Layered Depth Images(LDI) | 1998 · 微软研究院 | 每条视线存多个带深度的像素,被遮挡内容也有地方放 | |
| Stereo Magnification / MPI | 2018 · Google | 一摞平行的半透明 RGBA 平面,网络从窄基线像对直接预测 | arXiv |
| Facebook 3D Photos | 2018 · Facebook | 第一个大规模消费级落地(最初依赖双摄/人像深度) | --- |
| 3D Ken Burns | 2019 · Niklaus et al. | 单图 → 点云 → 相机推拉 + 补洞,自动生成视差视频 | --- |
| 3D Photo Inpainting | 2020 · Shih et al.(CVPR) | LDI + 深度边缘切开 + 上下文感知补全颜色和深度 | 项目页 · arXiv |
| One Shot 3D Photography | 2020 · Facebook(SIGGRAPH) | 单图、全端侧、几秒出片:深度网络 + LDI + 图集网格 | arXiv · 项目页 |
| Cinematic Photos | 2020 · Google Photos | depth mesh 分支:优化虚拟相机轨迹绕开补洞 | 技术博客 |
| AdaMPI | 2022 · SIGGRAPH | MPI 的平面深度自适应贴合场景 | arXiv |
| NeRF (2020--2023) | |||
| NeRF | 2020 · ECCV | 把场景训练进网络权重,沿光线查询并积分------连续场的质量标杆 | 项目页 · arXiv |
| pixelNeRF | 2021 · CVPR | 从逐场景优化走向单图/少图前馈条件生成 | 项目页 · arXiv |
| MINE | 2021 · 字节跳动/NUS(ICCV) | MPI × NeRF:把固定层改造成可连续查询的深度场 | 项目页 · arXiv |
| Instant-NGP | 2022 · NVIDIA(SIGGRAPH 最佳论文) | 多分辨率哈希编码把训练从小时压到秒级 | arXiv · GitHub |
| Mip-NeRF 360 | 2022 · CVPR Oral | 从桌面小物体扩展到无边界真实 360° 场景 | 项目页 · arXiv |
| 3D Gaussian Splatting(2023--) | |||
| 3D Gaussian Splatting(3DGS) | 2023 · Inria(SIGGRAPH 最佳论文) | 显式高斯 + 可微 splatting,画质对标 NeRF、速度回到实时 | 项目页 |
| Splatter Image | 2023 · 牛津 VGG(CVPR'24) | 图像到图像网络,每像素回归一个高斯,重建 38fps | arXiv |
| Flash3D | 2024 · 牛津 VGG(3DV'25) | 第一层高斯贴预测深度 + 偏移层幻觉遮挡内容,单图零样本泛化 | arXiv |
| Apple SHARP | 2025 · Apple | 单图前馈回归 metric(绝对米制)高斯,GPU <1s、100+fps,LPIPS 较 SOTA 降 25--34%,开源 | 项目页 · arXiv · GitHub |
| CAT3D | 2024 · Google DeepMind(NeurIPS Oral) | 生成式视角合成:多视角扩散从单图想象一致新视角,约 1 分钟出片 | 项目页 · arXiv |
| World Labs Marble | 2025 · World Labs | 文本/单图/视频 → 可走入的高斯世界,可导出 splats/mesh 的商用产品 | 官方博客 |