EXACT-MPPI 通过路径积分控制实现任意足迹机器人的精确有符号距离导航【文献解读】
论文标题:EXACT-MPPI: Exact Signed-Distance Navigation for Arbitrary-Footprint Robots from Point Clouds via Path Integral Control
作者:Chen Peng†, Zhikang Ge†, Wenwu Lu, Haiming Gao*, Stavros Vougioukas, Peng Wei*
机构:浙江大学杭州国际科创中心 / 加州大学戴维斯分校
发表时间 :2026年6月(arXiv:2605.29663v2)
论文对应github链接 :https://agroboticsresearch.github.io/exact-mppi/
本人早期思路github链接:https://github.com/Robot-Nav/SA-MPPI
一、关键科学问题与技术挑战
1.1 核心问题
地面机器人在杂乱环境中进行局部导航时,如何精确考虑其真实几何外形(尤其是非凸、不规则足印),以在狭窄通道中保留可行运动、避免不必要的碰撞膨胀,同时满足实时性要求?
1.2 四大技术挑战
-
碰撞几何精确评估的计算代价高:复杂足印的精确碰撞检测计算量大,现有方法常用圆形、矩形或凸包近似,在狭窄通道中会膨胀碰撞边界、消除原本可行的运动。
-
中间地图表示的局限:传统导航管线需先构建占据栅格、代价地图或ESDF等中间表示,引入分辨率敏感性、膨胀半径依赖等问题,且原始传感器数据中的几何细节在栅格化过程中丢失。
-
运动学约束的适配:不同平台(差速驱动、阿克曼转向、全向移动等)具有不同运动学模型,规划框架需在不重新设计核心机制的情况下适配多种运动模型。
-
学习方法的平台依赖:基于学习的方法(如NeuPAN的DUNE编码器)将足印编码进网络权重,足印变化需重新训练,跨平台迁移成本高。
二、研究方法与算法原理
2.1 总体框架
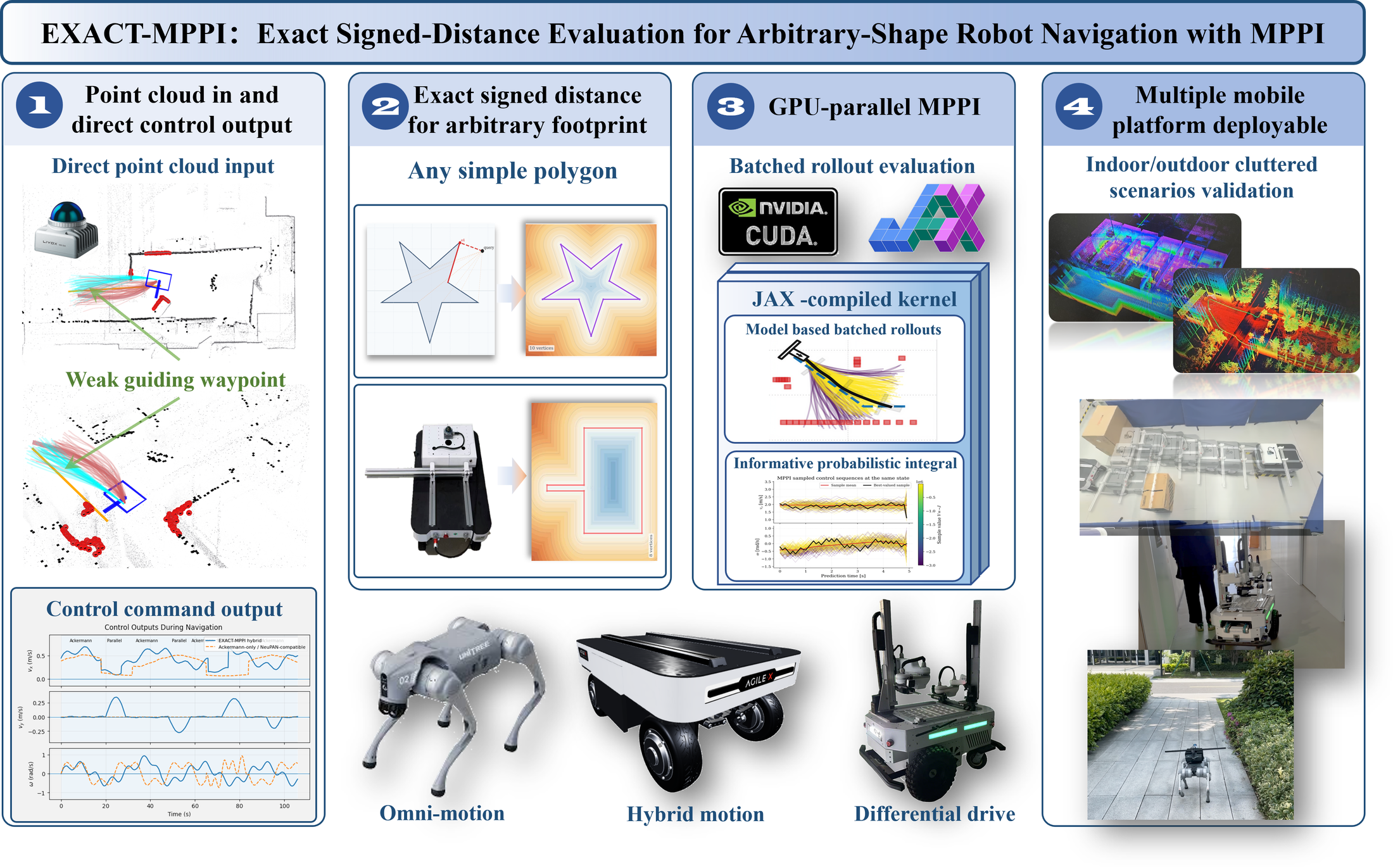
EXACT-MPPI 是一个免训练(training-free)的感知到控制(perception-to-control)局部导航框架,直接从局部点云观测和弱引导信号映射到运动指令,无需构建任何中间地图表示。
核心思路 :将解析精确符号距离评估器 嵌入模型预测路径积分(MPPI)控制器,在MPPI滚动展开中,将障碍物点云变换到预测机体坐标系后,与显式2D足印进行精确距离评估,如下图1/2。
图1:EXACT-MPPI概述
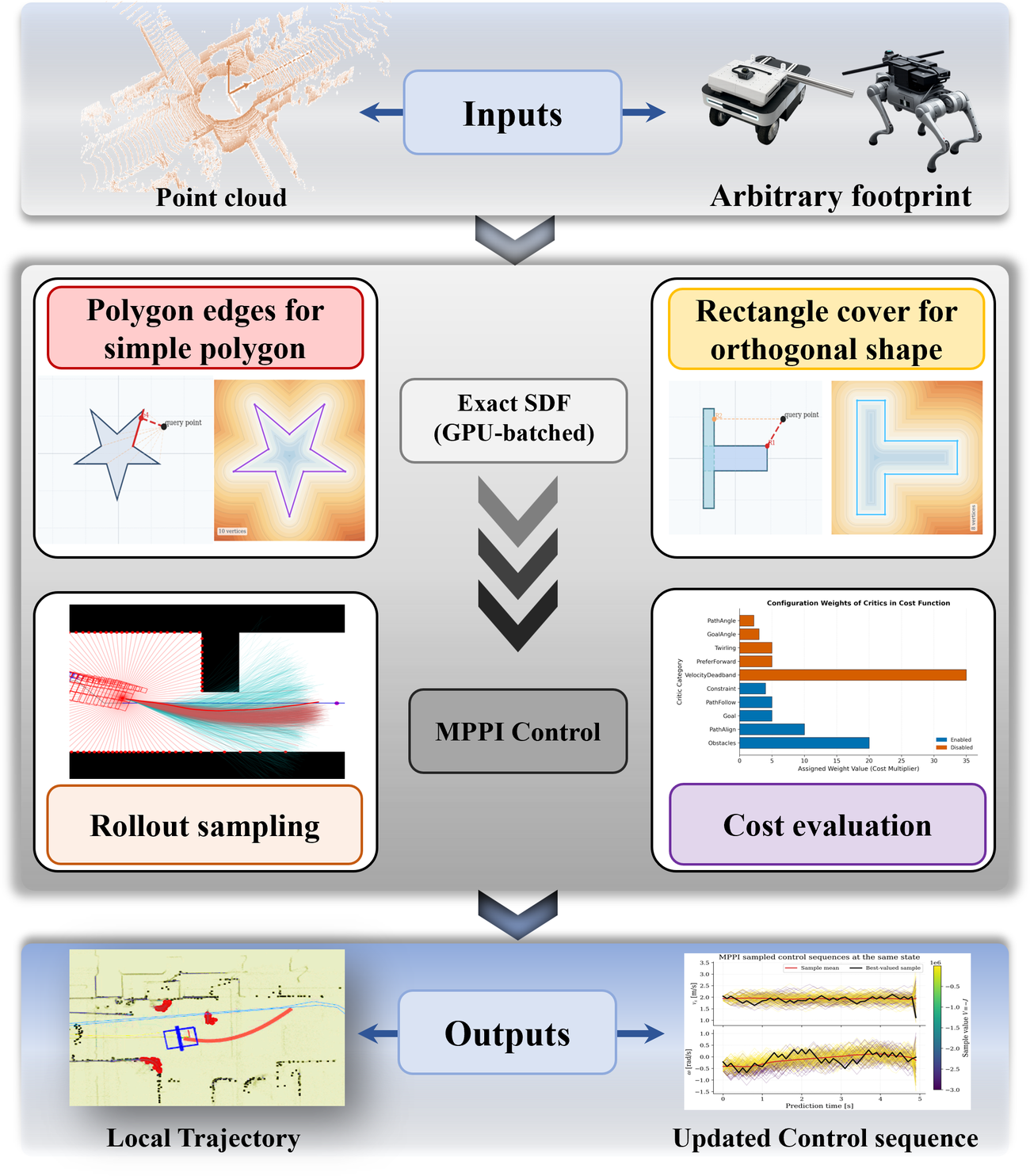
图2:系统架构
2.2 机器人有效足印建模
有效足印 Beff⊂R2B_{\text{eff}} \subset \mathbb{R}^2Beff⊂R2 定义为机体坐标系下的紧凑平面集合:
Beff=Bchassis∪BaddB_{\text{eff}} = B_{\text{chassis}} \cup B_{\text{add}}Beff=Bchassis∪Badd
其中 BchassisB_{\text{chassis}}Bchassis 为底盘几何,BaddB_{\text{add}}Badd 为附加几何(如叉车载荷、拖挂农具、抓取物体等)。
框架提供两种计算表示:
| 表示方式 | 适用场景 | 计算方式 |
|---|---|---|
| 矩形覆盖(Rectangle Cover) | 正交足印(轴对齐矩形组合) | 闭式点到盒子距离,仅需逐元素算术和一次向量范数 |
| 简单多边形(Simple Polygon) | 任意凸/凹足印 | 点到边距离 + 射线法内外测试 |
2.3 解析符号距离评估
2.3.1 滚动展开坐标系变换
对于滚动展开 rrr 和预测步 hhh,障碍物点 oio_ioi 变换到预测机体坐标系:
pb,h,i(r)=Rθh(r)⊤(oi−th(r))p_{b,h,i}^{(r)} = R_{\theta_h^{(r)}}^\top (o_i - t_h^{(r)})pb,h,i(r)=Rθh(r)⊤(oi−th(r))
足印在机体坐标系中保持静态,障碍物点被变换到每个预测位姿的机体坐标系进行距离评估。
2.3.2 正交足印距离计算
对于查询点 ppp 和矩形 RjR_jRj(中心 cjc_jcj,半尺寸 sjs_jsj),定义:
aj(p)=∣p−cj∣−sja_j(p) = |p - c_j| - s_jaj(p)=∣p−cj∣−sj
点到盒子符号距离:
dbox,j±(p)=∥max(aj(p),0)∥2+min(max(aj,x,aj,y),0)d_{\text{box},j}^{\pm}(p) = \|\max(a_j(p), 0)\|2 + \min(\max(a{j,x}, a_{j,y}), 0)dbox,j±(p)=∥max(aj(p),0)∥2+min(max(aj,x,aj,y),0)
矩形覆盖足印的符号距离取最小值:
drect±(p,Beff)=minj=1,...,Rdbox,j±(p)d_{\text{rect}}^{\pm}(p, B_{\text{eff}}) = \min_{j=1,\ldots,R} d_{\text{box},j}^{\pm}(p)drect±(p,Beff)=j=1,...,Rmindbox,j±(p)
2.3.3 一般简单多边形距离计算
对于边 eb=vb+1−vbe_b = v_{b+1} - v_beb=vb+1−vb,裁剪投影参数:
αb(p)=max(0,min(1,(p−vb)⊤(vb+1−vb)∥eb∥2))\alpha_b(p) = \max\left(0, \min\left(1, \frac{(p - v_b)^\top (v_{b+1} - v_b)}{\|e_b\|^2}\right)\right)αb(p)=max(0,min(1,∥eb∥2(p−vb)⊤(vb+1−vb)))
点到线段距离:
dseg,b(p)=∥p−(vb+αb(p)eb)∥2d_{\text{seg},b}(p) = \|p - (v_b + \alpha_b(p) e_b)\|_2dseg,b(p)=∥p−(vb+αb(p)eb)∥2
符号由射线法内外测试确定:
σ(p,Beff)={−1,p∈Beff+1,p∉Beff\sigma(p, B_{\text{eff}}) = \begin{cases} -1, & p \in B_{\text{eff}} \\ +1, & p \notin B_{\text{eff}} \end{cases}σ(p,Beff)={−1,+1,p∈Beffp∈/Beff
最终符号距离:
dpoly±(p,Beff)=σ(p,Beff)⋅minb=1,...,Bdseg,b(p)d_{\text{poly}}^{\pm}(p, B_{\text{eff}}) = \sigma(p, B_{\text{eff}}) \cdot \min_{b=1,\ldots,B} d_{\text{seg},b}(p)dpoly±(p,Beff)=σ(p,Beff)⋅b=1,...,Bmindseg,b(p)
精确性保证 :对于简单多边形,该方法计算的是到多边形边界的精确欧几里得距离;对于矩形并集,外部距离精确,内部穿透量可能因矩形重叠而与真实值有差异,但碰撞分类始终正确。如图3。
图3:由多边形边评估器对六个复杂度不同的简单多边形生成的代表性带符号距离场

2.4 MPPI控制器设计
2.4.1 基本MPPI流程
在每个重规划时刻,MPPI维护名义控制序列 U={u0,...,uT−1}U = \{u_0, \ldots, u_{T-1}\}U={u0,...,uT−1},通过添加扰动生成 KKK 条采样轨迹:
uh(r)=uh+ϵh(r)u_h^{(r)} = u_h + \epsilon_h^{(r)}uh(r)=uh+ϵh(r)
每条滚动展开的代价函数:
J(r)=∑h=0T−1ϕtask(qh(r),uh(r))+ϕctrl(uh(r))+ϕobs(dmin,h(r))J^{(r)} = \sum_{h=0}^{T-1} \left \\phi_{\\text{task}}(q_h\^{(r)}, u_h\^{(r)}) + \\phi_{\\text{ctrl}}(u_h\^{(r)}) + \\phi_{\\text{obs}}(d_{\\min,h}\^{(r)}) \\rightJ(r)=h=0∑T−1ϕtask(qh(r),uh(r))+ϕctrl(uh(r))+ϕobs(dmin,h(r))
重要性权重:
ω(r)=exp(−(J(r)−β)/λ)∑j=1Kexp(−(J(j)−β)/λ)\omega^{(r)} = \frac{\exp\left(-(J^{(r)} - \beta)/\lambda\right)}{\sum_{j=1}^{K} \exp\left(-(J^{(j)} - \beta)/\lambda\right)}ω(r)=∑j=1Kexp(−(J(j)−β)/λ)exp(−(J(r)−β)/λ)
名义控制序列更新:
uh←uh+∑r=1Kω(r)ϵh(r)u_h \leftarrow u_h + \sum_{r=1}^{K} \omega^{(r)} \epsilon_h^{(r)}uh←uh+r=1∑Kω(r)ϵh(r)
2.4.2 安全代价与轨迹验证
软碰撞惩罚:
ϕobs(d)=wcoll⋅I(d<0)+wrep⋅max(dsafe−d,0)2\phi_{\text{obs}}(d) = w_{\text{coll}} \cdot \mathbb{I}(d < 0) + w_{\text{rep}} \cdot \max(d_{\text{safe}} - d, 0)^2ϕobs(d)=wcoll⋅I(d<0)+wrep⋅max(dsafe−d,0)2
- 第一项:惩罚足印穿透
- 第二项:惩罚低于安全裕度的轨迹
硬安全筛选 :记录不安全标志 χ(r)\chi^{(r)}χ(r),当任意预测步违反安全裕度时触发,不安全滚动展开代价增加 winfw_{\text{inf}}winf 使其权重趋近于零。
轨迹验证 :更新后的名义轨迹需通过安全验证(所有步 dmin,hnom≥dsafed_{\min,h}^{\text{nom}} \geq d_{\text{safe}}dmin,hnom≥dsafe),否则执行零速度保持并重置控制序列。
2.5 批量GPU并行计算
所有计算在JAX中实现为批量操作,并行维度包括:
- K 条滚动展开
- T 个预测步
- N 个障碍物点
- R/B 个足印基元
每个控制周期评估 K×T×NK \times T \times NK×T×N 次符号距离查询(默认 K=1000,T=50,N=100K=1000, T=50, N=100K=1000,T=50,N=100,即 5.0×1065.0 \times 10^65.0×106 次查询)。
计算复杂度:
- 矩形覆盖:O(KTNR)O(KTNR)O(KTNR)
- 多边形:O(KTNB)O(KTNB)O(KTNB)
2.6 混合运动模式扩展
对于支持多种非滑移运动模式的平台(如AgileX Ranger Mini),框架将每种运动模式作为独立的滚动展开族进行评估:
- 每种模式 m∈Mhybm \in M_{\text{hyb}}m∈Mhyb 独立运行MPPI循环
- 代价增加模式切换惩罚:Jˉm=Jm+λswitch⋅I(m≠mprev)\bar{J}m = J_m + \lambda{\text{switch}} \cdot \mathbb{I}(m \neq m_{\text{prev}})Jˉm=Jm+λswitch⋅I(m=mprev)
- 冷却变量防止频繁切换
- 选择代价最小的模式:m∗=argminmJˉmm^* = \arg\min_m \bar{J}_mm∗=argminmJˉm
- 执行命令经过死区校正和最小执行值缩放
2.7 支持的运动学模型
| 模型 | 控制输入 | 适用平台 |
|---|---|---|
| 差速驱动(Unicycle) | (v,ω)(v, \omega)(v,ω) | 双臂运输机器人 |
| 阿克曼转向(Bicycle) | (v,δ)(v, \delta)(v,δ) | 乘用车辆 |
| 全向运动(Omni) | (vx,vy,ω)(v_x, v_y, \omega)(vx,vy,ω) | 全向底盘 |
| 原地旋转(Spin) | (ω)(\omega)(ω) | 混合模式平台 |
| 平行移动(Parallel) | (vpara)(v_{\text{para}})(vpara) | 侧向平移平台 |
2.8 实验设计
实验围绕四个核心问题展开:
- 计算效率:JAX批量符号距离评估器能否支持实时MPPI滚动展开?
- 足印建模保真度:精确足印感知评估是否在狭窄通道中保留可行运动?
- 跨平台部署:同一碰撞评估和MPPI结构能否跨平台复用?
- 混合运动适应性:能否通过滚动展开代价评估实现运动模式选择?
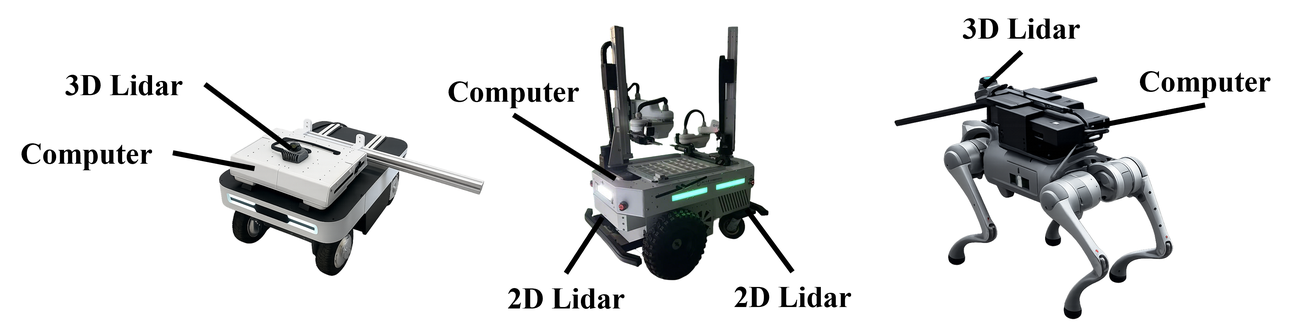
实验平台:
- 仿真:IR-SIM(轻量级)、Gazebo(高保真)
- 硬件:差速双臂机器人、AgileX Ranger Mini(混合4WS/4WD)、Unitree Go2四足机器人(携带刚性杆)
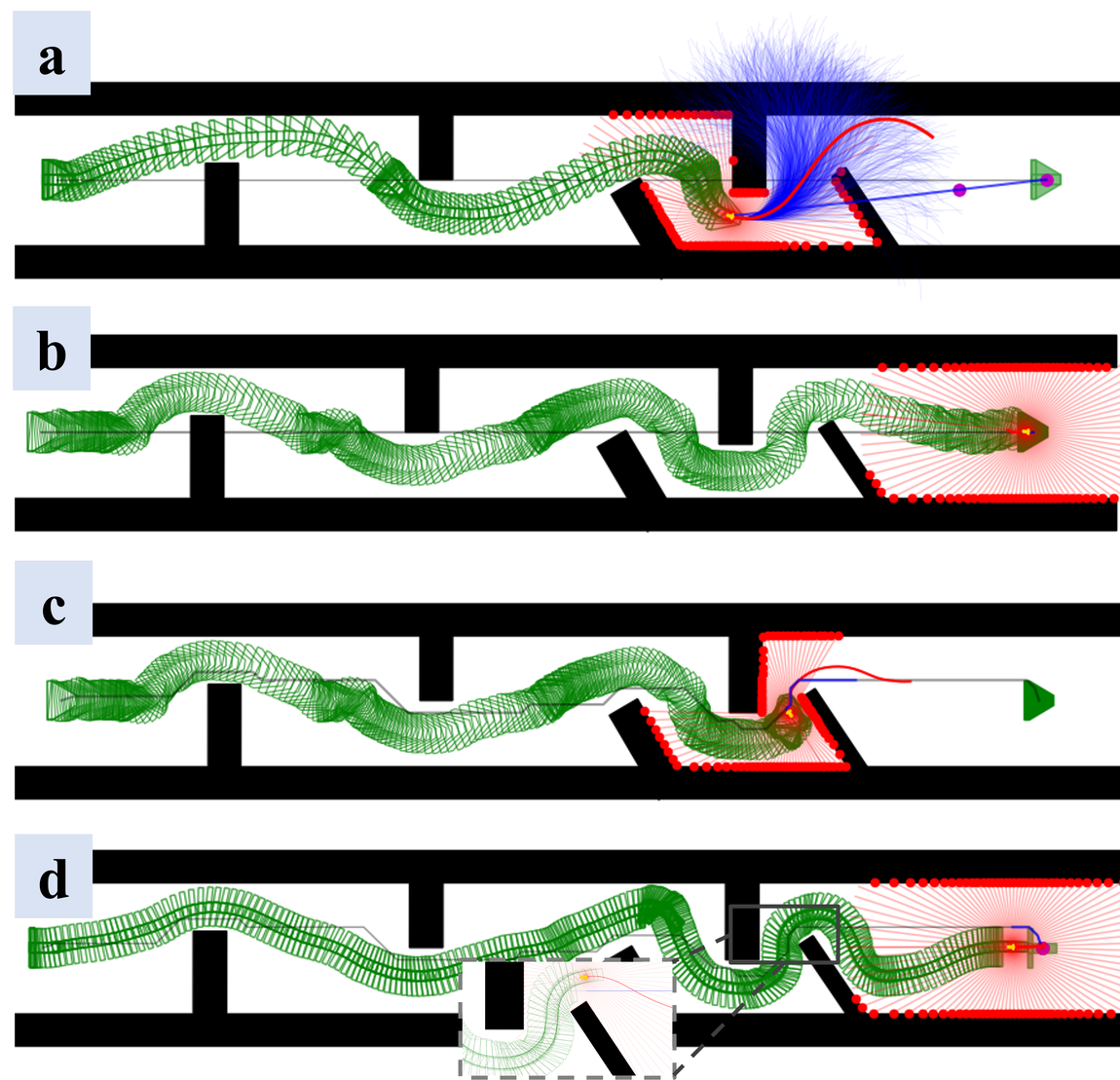
评估指标 :成功率、导航时间、平均速度、路径长度、狭窄度(DoN = Wr/WpW_r / W_pWr/Wp)
走廊DoN扫描的代表性案例有:(a)DoN = 0.6时的NeuPAN,(b)DoN = 0.6时的凸MPPI,(c)DoN = 1.0时的NeuPAN,以及(d)DoN = 1.0时的EXACT-MPPI。(d)中的放大嵌入展示了显式T形足迹如何保留一条狭窄且可行的通道,该通道被凸壳近似去除。
三、主要创新点与学术贡献
3.1 感知到控制的免地图导航框架
提出EXACT-MPPI框架,直接从局部LiDAR点云观测和弱路径点引导映射到运动指令,无需构建占据栅格、符号距离场或局部代价地图。这消除了中间地图表示带来的分辨率敏感性和几何细节丢失问题,实现了从感知到控制的端到端局部规划。
3.2 解析精确符号距离评估器
开发了面向显式2D足印表示的解析点到足印符号距离评估器:
- 统一处理凸/凹足印:简单多边形公式统一处理凸和凹平面足印,无需凸分解或膨胀
- 矩形覆盖加速:对正交足印提供闭式点到盒子距离特化,比多边形边评估快2.03--3.34倍
- 免训练:相比NeuPAN的DUNE学习编码器,更换足印仅需更新多边形描述,无需重新训练
- GPU加速:相比DUNE,在100,000查询点基准测试中实现12.6×--18.9×的GPU加速
3.3 足印感知MPPI集成
将符号距离评估器作为足印感知安全代价和验证机制集成到MPPI中:
- 评估器和滚动展开计算实现为JAX编译的批量操作,跨滚动展开样本、预测步、障碍物点和足印边并行化
- 软碰撞惩罚 + 硬安全筛选 + 轨迹验证的三层安全机制
- 非光滑距离函数与MPPI的无梯度采样特性天然适配
3.4 跨平台零训练迁移
同一碰撞评估和MPPI控制结构可跨多种地面机器人平台部署:
- 差速驱动、阿克曼转向、全向移动、混合模式平台
- 部署到新平台仅需指定足印多边形和运动模型
- 实验覆盖室内(办公室、走廊)和室外(花园式)环境,静态和低速动态障碍物
3.5 关键实验结论
| 实验编号 | 核心结论 |
|---|---|
| 实验1(基准测试) | 解析评估器比DUNE快一个数量级,矩形覆盖比多边形边评估快2--3.34倍,部署无需训练 |
| 实验2(狭窄通道) | 精确足印在DoN=1.0时保留可行运动,凸包近似方法全部失败;动态障碍物场景成功率0.92 vs 0.76(NeuPAN) |
| 实验3(跨平台部署) | 三种硬件平台(差速/混合/四足)成功部署,仅更换足印描述和运动模型 |
| 实验4(混合模式) | 混合模式比纯双阿克曼模式完成时间减少约24% |
3.6 与NeuPAN的核心区别
| 维度 | NeuPAN | EXACT-MPPI |
|---|---|---|
| 距离评估 | 学习近似(DUNE编码器) | 解析精确几何 |
| 足印表示 | 凸集(非凸需凸分解) | 简单多边形(含凹形) |
| 足印变更 | 需重新训练编码器 | 仅更新多边形描述 |
| 运动规划 | 梯度优化(NRMP) | 无梯度采样(MPPI) |
| 距离函数要求 | 需可微 | 支持非光滑 |
四、局限性与未来方向
-
局部规划器定位:EXACT-MPPI是局部规划器,假设上游模块提供障碍物观测和弱引导,不处理全局路径生成、语义场景理解或任务级决策。
-
运动学模型限制:当前基于运动学模型的滚动展开适用于低速场景,未验证高速运动、剧烈机动、粗糙地形或铰接式系统的动力学可行性。
-
2D足印局限:碰撞评估基于平面投影足印和预处理点云,不建模3D体几何、高度相关间隙、悬挂障碍物或姿态依赖的机器人形状。
-
动态障碍物处理:通过滚动时域重规划处理,无显式障碍物运动预测,在密集人群或快速变化环境中可能不足。
-
未来方向:与高层感知/引导模块集成、动力学/铰接式滚动展开模型、3D体间隙推理、显式障碍物运动预测。