目录
前言
点云处理通常包含可视化、去噪、滤波、配准、分割/聚类、特征提取、重建 等关键模块,每一模块均有多种算法可选。PCL(Point Cloud Library)提供了丰富的接口来实现各类算法,CloudCompare则可用于可视化、手动处理和结果验证。结合ROS框架,可以将传感器发布的点云消息转为PCL格式进行处理,再通过pcl_conversions转回ROS消息,实现点云算法的在线调试和可视化。
下图展示了典型的点云处理流程:可视化检查→去噪→滤波→配准→分割/聚类→特征提取→重建→应用,各步骤数据依次传递,形成完整链路。

一、点云可视化
-
目的与意义:可视化是点云处理的第一步,用于直观检查数据完整性、噪声分布、视角重叠等情况。它有助于快速发现采集异常、配准偏差等问题,指导后续处理。
-
PCL实现 :PCL提供
PCLVisualizer和CloudViewer类。PCLVisualizer功能强大,可显示点云、法线、坐标系、交互自定义等。示例代码:pcl::PointCloudpcl::PointXYZ::Ptr cloud(new pcl::PointCloudpcl::PointXYZ);
pcl::io::loadPCDFile("cloud.pcd", *cloud);
pcl::visualization::PCLVisualizer::Ptr viewer(new pcl::visualization::PCLVisualizer("3D Viewer"));
viewer->addPointCloudpcl::PointXYZ(cloud, "sample cloud");
viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 3, "sample cloud");
viewer->addCoordinateSystem(1.0);
while (!viewer->wasStopped()) { viewer->spinOnce(100); } -
CloudCompare操作:直接打开点云文件(File→Open),可通过视图旋转、缩放观测点云。可在"Colors"菜单下以高度或RGB着色,可用于突出局部特征。工具栏提供"剪刀"裁剪(Crop)功能,用于去除无关区域。
-
ROS集成 :在ROS中,可在RViz中订阅点云话题进行可视化。通常编写节点订阅
sensor_msgs/PointCloud2,转换为PCL数据并可视化或标注。示例如下:void cloud_cb(const sensor_msgs::PointCloud2ConstPtr& msg) {
pcl::PointCloudpcl::PointXYZ cloud;
pcl::fromROSMsg(*msg, cloud);
// 进行可视化、测量或标注
} -
RViz添加PointCloud2显示,并设置对应Topic。
-
调参建议:点大小和颜色映射可调;对大型点云可使用OctreeLOD预处理;视图中启用坐标系帮助判断姿态。
-
优缺点:直接可视化易于理解,缺点是处理量大时渲染慢;需注意坐标系一致。
-
应用场景 :
- SLAM/建图:实时可视化拼接结果,检查地图质量。
- 工业测量:可视化扫描后的零件,检测遮挡或漏扫。
- 逆向工程:查看扫描仪采集的建筑或文物点云。
- 机器人抓取:在RViz中可视化点云与目标物体的重合度。
二、点云去噪(异常点移除)
-
算法原理 :去噪旨在移除采集误差引入的异常点(离群点)。常用方法包括 "统计滤波(Statistical Outlier Removal, SOR)和 半径滤波(Radius Outlier Removal)"等:
- 统计滤波:对每点计算其与邻域点的平均距离,如果明显大于平均值加上阈值乘以标准差,则视为离群点。
- 半径滤波:统计点在给定半径内的邻居数,如果邻居太少,则删除该点。
- 基于模型:通过RANSAC拟合(如平面、圆柱)模型,只保留拟合平面内点。
-
PCL接口 :PCL提供
pcl::StatisticalOutlierRemoval<PointT>和pcl::RadiusOutlierRemoval<PointT>。示例(统计滤波)pcl::StatisticalOutlierRemovalpcl::PointXYZ sor;
sor.setInputCloud(cloud);
sor.setMeanK(50); // 邻域点数
sor.setStddevMulThresh(1.0); // 标准差倍数阈值
sor.filter(*cloud_filtered); -
CloudCompare操作 :可用Tools→Clean→SOR filter 应用统计滤波;也可使用Noise filter(基于表面距离)处理光滑表面噪声。
-
ROS集成:在ROS节点中可将PointCloud2转为PCL后应用以上滤波,然后再转换回ROS消息发布。
-
参数调优 :StatisticalFilter的
MeanK影响邻域计算精度,StddevMulThresh越小越严格;RadiusFilter的radius与min_neighbors需根据点云密度调整。 -
复杂度:主要开销在邻域搜索,通常为O(n \log n)。
-
优缺点:方法简单高效,对随机噪声效果好;对稀疏或非高斯噪声可能误删过多或漏检。
-
常见问题:若参数过大,可能误删有效点;过小则去噪不彻底。可结合可视化观察结果。
-
应用场景 :
- 自动驾驶:移除LiDAR扫描中空气中的随机噪声点,提高识别精度。
- 无人机测绘:消除飞行平台抖动造成的异常点。
- 工业检测:过滤扫描仪误测的孤立点,提高测量精度。
- 室内SLAM:去除RGB-D相机因窗帘等反射造成的噪声点。
-
示例:
// 统计滤波示例
pcl::StatisticalOutlierRemovalpcl::PointXYZ sor;
sor.setInputCloud(cloud);
sor.setMeanK(50);
sor.setStddevMulThresh(1.0);
sor.filter(*cloud_filtered);
三、点云滤波(采样与降采样)
-
目的与分类 :滤波既可用于去噪,也可用于降低点云密度、提取ROI。常见滤波器有体素滤波 (VoxelGrid) 下采样 和直通滤波(PassThrough)等。
-
体素滤波(VoxelGrid):将空间划分为固定大小的立方体网格,在每个网格中用质心或中心点代表,减少点数且保留形状。
-
直通滤波(PassThrough):按坐标轴设置范围,剔除超出范围的点,用于裁剪或ROI截取。
-
条件滤波:根据点属性(如强度、颜色)设置条件筛选点。
-
PCL接口 :常用
pcl::VoxelGrid和pcl::PassThrough。示例(体素滤波):pcl::VoxelGridpcl::PointXYZ vg;
vg.setInputCloud(cloud);
vg.setLeafSize(0.01f, 0.01f, 0.01f); // 体素边长1cm
vg.filter(*cloud_filtered);
PassThrough示例:
pcl::PassThrough<pcl::PointXYZ> pass;
pass.setInputCloud(cloud);
pass.setFilterFieldName("z");
pass.setFilterLimits(0.0, 1.5); // 保留0~1.5米内点
pass.filter(*cloud_filtered);-
CloudCompare操作 :可通过Edit→Subsample 进行点云抽稀(类似体素滤波);可用剪刀(Crop)截取区域;对于高程滤波,可用Edit→Scalar field→Filter by value过滤。
-
ROS集成:同样在节点中使用PCL滤波器处理订阅的点云,示例见上述PassThrough/ VoxelGrid代码。
-
参数建议 :体素滤波的
leaf_size设大点可更降采样但可能丢失细节,建议根据应用调整;PassThrough范围根据场景选取。 -
复杂度:VoxelGrid建树为O(n)或O(n\log n),筛选非常快。
-
优缺点:VoxelGrid可大幅减小数据量而保形状,但可能丢失小结构;直通滤波简单快速,但需手动设限。
-
常见问题:滤波前后坐标系需注意一致;过度采样可能丢失关键信息。
-
应用场景 :
- 自动驾驶:对高频点云下采样加速处理。
- 室内导航:截取特定楼层高度区间的数据,剔除天花板和地板。
- 工业机器人:滤除远处桌面之外的点,聚焦工作区域。
- 三维重建:预处理大规模扫描数据,降低计算量。
-
示例:
// 体素滤波示例
pcl::VoxelGridpcl::PointXYZ vg;
vg.setInputCloud(cloud);
vg.setLeafSize(0.05f, 0.05f, 0.05f);
vg.filter(*cloud_downsampled);
四、点云配准
-
算法原理 :配准用于将多帧或多视角点云对齐至统一坐标系。常见方法有粗配准 (特征匹配 + RANSAC)和精配准 (迭代最近点ICP、NDT)。
- ICP算法:迭代计算源点云与目标点云最近点对应关系,然后求解最佳刚性变换以最小化距离误差,重复迭代直至收敛。
- NDT(正态分布变换):将目标点云分为栅格,对每个栅格内点拟合高斯分布,用分布间匹配进行配准,适合大场景。
- 特征配准:先提取特征描述子(如FPFH),通过RANSAC进行粗对齐。
-
PCL接口 :常用
pcl::IterativeClosestPoint<PointT,PointT>(ICP)和pcl::NormalDistributionsTransform<PointT,PointT>(NDT)。ICP示例:pcl::IterativeClosestPoint<pcl::PointXYZ, pcl::PointXYZ> icp;
icp.setInputSource(source_cloud);
icp.setInputTarget(target_cloud);
icp.setMaxCorrespondenceDistance(0.1);
icp.setMaximumIterations(50);
pcl::PointCloudpcl::PointXYZ aligned;
icp.align(aligned);
if(icp.hasConverged()) { /* 获取icp.getFinalTransformation() */ } -
CloudCompare操作 :使用 Tools→Registration→Fine registration (ICP) 进行手动或自动ICP配准;也可用 Align (point pairs picking) 手动选点配准;"Match bounding-box centers"对齐盒心。
-
ROS集成:ROS中订阅不同帧的点云,通过TF或本体预测初始位姿,调用ICP/NDT完成精配准。通常转换消息为PCL后调用上述类。
-
参数调优 :ICP的
MaxCorrespondenceDistance(对应点最大距离)和TransformationEpsilon(收敛阈值)影响速度与精度;NDT的格点分辨率(setResolution)需根据数据范围调节。 -
复杂度:ICP典型复杂度约O(NM)每次迭代(N、M分别为点数),NDT每次迭代O(n \log n)。大点云匹配代价高。
-
优缺点:ICP精度高但依赖较好的初始位姿,易陷入局部最优;NDT鲁棒性更强,适合粗对齐;特征配准不需初始对齐,但需稳定特征。
-
常见问题:配准前应滤波降噪,否则噪点干扰对应;需保证重叠区域充分,否则无解;当点云稀疏或纹理少时易失配。
-
应用场景 :
- SLAM建图:将里程计获取不同时间点云连续拼接构建环境地图。
- 自动驾驶:将车辆两帧LiDAR数据配准以跟踪障碍物或估计运动。
- 工业机器人:视觉系统中不同视角扫描的物体拼接为完整模型。
- 考古扫描:多视角扫描文物,配准合成完整三维模型。
-
示例:
// ICP示例代码
pcl::IterativeClosestPoint<pcl::PointXYZ, pcl::PointXYZ> icp;
icp.setInputSource(source_cloud);
icp.setInputTarget(target_cloud);
icp.setMaxCorrespondenceDistance(0.05);
icp.setMaximumIterations(30);
pcl::PointCloudpcl::PointXYZ Final;
icp.align(Final);
if (icp.hasConverged()) { std::cout << "ICP converged." << std::endl; }
五、点云分割
-
算法原理 :分割旨在将点云划分出不同的物体或区域。常用方法包括基于模型 和基于聚类 :
- RANSAC平面分割 :利用
pcl::SACSegmentation拟合平面,将属于平面的内点提取出来,适用于提取地面、桌面等大平面。 - 区域生长:以法线或颜色平滑为准则,逐步生长平坦区域(如PCL的RegionGrowing算法)。
- 基于聚类(参见下文聚类章节)。
- RANSAC平面分割 :利用
-
PCL接口:例如提取平面:
pcl::SACSegmentationpcl::PointXYZ seg;
seg.setOptimizeCoefficients(true);
seg.setModelType(pcl::SACMODEL_PLANE);
seg.setMethodType(pcl::SAC_RANSAC);
seg.setDistanceThreshold(0.01);
seg.setInputCloud(cloud);
pcl::ModelCoefficients coeff;
pcl::PointIndices inliers;
seg.segment(inliers, coeff); -
提取到
inliers后可分离出平面点和剩余点。该示例源自官方教程。 -
CloudCompare操作 :可用Tools→Segmentation→Label Connected Comp.将同一标签的点云分为不同实体;也可用Edit→Crop配合标签进行手动分割;平面检测可借助插件"qRansacSD"自动检测多种几何形状(圆柱、球面等)。
-
ROS集成 :在节点中使用
pcl::SACSegmentation提取地面或其他平面,然后发布分割结果,可用于地面检测或物体分离。 -
参数调优 :RANSAC的
DistanceThreshold决定内点距离公差;迭代次数MaxIterations影响鲁棒性。区域生长的平滑阈值(setSmoothnessThreshold)和曲率阈值控制分割精度。 -
复杂度:RANSAC每次迭代是O(n),总共迭代次数由重叠比例控制;RegionGrowing基于邻域搜索O(n\log n)。
-
优缺点:平面分割简洁高效,但只能提取单一形状;区域生长对曲面适用,对小目标可能效果不佳;基于深度学习的语义分割可识别更多类别,但需训练数据。
-
常见问题:误检噪声或近似平面的物体;需要多次迭代提取多个物体;平面分割后需移除提取的内点再重复。
-
应用场景 :
- 无人驾驶:提取道路、车道线点云;分离车辆与路面。
- 机器人操作:从背景中分割出桌面上的物体,进行抓取。
- 逆向工程:将点云分割为结构面与细节部件,分别建模。
- 测绘:从建筑物点云中分割出墙面、屋顶、地面等。
-
示例:
// 平面分割示例
pcl::SACSegmentationpcl::PointXYZ seg;
seg.setOptimizeCoefficients(true);
seg.setModelType(pcl::SACMODEL_PLANE);
seg.setMethodType(pcl::SAC_RANSAC);
seg.setDistanceThreshold(0.01);
seg.setInputCloud(cloud);
pcl::PointIndices::Ptr inliers(new pcl::PointIndices);
pcl::ModelCoefficients::Ptr coeff(new pcl::ModelCoefficients);
seg.segment(*inliers, *coeff);
// inliers->indices包含平面点的索引
六、点云聚类
-
算法原理 :聚类用于将点云中相互接近的点分组成不同簇,通常作为分割后的细分。经典算法是欧式聚类(Euclidean Cluster Extraction):对点集进行近邻搜索,类似洪水填充算法。DBSCAN也是一种常见的密度聚类方法。
-
PCL接口 :
pcl::EuclideanClusterExtraction通过KD树实现邻域搜索并分组。示例代码见官方教程:// 假设cloud_filtered为滤除平面后的点云
pcl::search::KdTreepcl::PointXYZ::Ptr tree(new pcl::search::KdTreepcl::PointXYZ);
tree->setInputCloud(cloud_filtered);
pcl::EuclideanClusterExtractionpcl::PointXYZ ec;
ec.setClusterTolerance(0.02); // 聚类距离阈值
ec.setMinClusterSize(100);
ec.setMaxClusterSize(25000);
ec.setSearchMethod(tree);
ec.setInputCloud(cloud_filtered);
std::vectorpcl::PointIndices cluster_indices;
ec.extract(cluster_indices);
// cluster_indices中每个元素是一簇点的索引 -
CloudCompare操作:可以使用**Tools→Segmentation→Label Connected Comp.**对连通区域做标记;也可以用剪刀等工具手动摘取。CloudCompare原生并没有直接执行欧式聚类的功能。
-
ROS集成:同样在ROS节点中使用PCL聚类后发布各簇点,常用于障碍物分割等。
-
参数调优 :
ClusterTolerance越大簇越宽松;MinClusterSize和MaxClusterSize控制簇大小过滤。 -
复杂度:构建KD树O(n\log n),聚类过程遍历每点O(n),总体大约O(n\log n)。
-
优缺点:欧式聚类简单易用,适合分离独立物体;对于密集或接近的物体分割效果差。DBSCAN对噪声鲁棒,但对参数敏感。
-
常见问题:簇之间距离过近会合并;噪声点可能形成小簇;需要先去除地面等大平面,避免干扰。
-
应用场景 :
- 自动驾驶:将点云中的行人、车辆、树木分簇,实现目标检测。
- 工业抓取:桌面物体聚类,识别各个零件的位置。
- 农业机器人:将果树点云分簇,识别单个果实。
-
示例:
// 欧式聚类示例
pcl::EuclideanClusterExtractionpcl::PointXYZ ec;
ec.setClusterTolerance(0.05);
ec.setMinClusterSize(50);
ec.setMaxClusterSize(10000);
ec.setSearchMethod(tree);
ec.setInputCloud(cloud_filtered);
std::vectorpcl::PointIndices clusters;
ec.extract(clusters);
std::cout << "Clusters found: " << clusters.size() << std::endl;
七、特征提取
-
用途 :从点云中提取局部或全局的几何描述子,为匹配、分类、识别等提供描述。常见特征包括表面法线 、曲率 、PFH/FPFH 、SHOT等。
-
主要算法 :
- 法线与曲率 :用
pcl::NormalEstimation估计每点法线和曲率,可用于颜色化显示和后续特征计算。 - PFH (Point Feature Histograms):基于点间几何关系构建直方图,计算复杂度O(nk^2);FPFH (Fast PFH)对PFH进行简化,复杂度降为O(nk)。
- SHOT:局部描述子,结合角度直方图。
- 法线与曲率 :用
-
PCL接口:如计算FPFH:
// 假设cloud和计算好的法线normals可用
pcl::FPFHEstimation<pcl::PointXYZ, pcl::Normal, pcl::FPFHSignature33> fpfh;
fpfh.setInputCloud(cloud);
fpfh.setInputNormals(normals);
pcl::search::KdTreepcl::PointXYZ::Ptr tree(new pcl::search::KdTreepcl::PointXYZ);
fpfh.setSearchMethod(tree);
fpfh.setRadiusSearch(0.05); // 设置邻域半径
pcl::PointCloudpcl::FPFHSignature33::Ptr fpfhs(new pcl::PointCloudpcl::FPFHSignature33);
fpfh.compute(*fpfhs); -
如此可得到每点33维特征向量。FPFH较PFH大幅降低了运算复杂度。
-
CloudCompare操作 :在
Edit→Normals菜单下可以计算和显示法线;Tools→Other→Compute geometric features可计算密度、曲率等(2.10+版本)。 -
ROS集成:在节点中计算特征常用于目标识别和配准前的粗匹配,如SAC-IA初始配准。
-
参数调优:FPFH等需设定搜索半径或邻域大小,半径越大包含信息越多但平滑。法线估计的邻域大小影响曲率估计。
-
复杂度:法线估计典型O(n \log n);FPFH简化后为O(nk)。
-
优缺点:高维特征能捕捉丰富形状信息,增强匹配鲁棒性;但计算开销大,对噪声敏感。
-
常见问题:特征尺度选择很重要;点云稀疏时有些特征失效;法线方向不一致需统一朝向。
-
应用场景 :
- 三维定位:在SLAM中使用FPFH或SHOT进行帧间粗配准。
- 物体识别:使用SHOT等描述子进行模型匹配。
- 缺陷检测:计算曲率检测表面缺陷。
-
示例:
// FPFH 特征计算示例
pcl::NormalEstimation<pcl::PointXYZ, pcl::Normal> ne;
ne.setInputCloud(cloud);
ne.setRadiusSearch(0.05);
pcl::PointCloudpcl::Normal::Ptr normals(new pcl::PointCloudpcl::Normal);
ne.compute(*normals);pcl::FPFHEstimation<pcl::PointXYZ, pcl::Normal, pcl::FPFHSignature33> fpfh;
fpfh.setInputCloud(cloud);
fpfh.setInputNormals(normals);
pcl::search::KdTreepcl::PointXYZ::Ptr tree(new pcl::search::KdTreepcl::PointXYZ);
fpfh.setSearchMethod(tree);
fpfh.setRadiusSearch(0.05);
pcl::PointCloudpcl::FPFHSignature33::Ptr fpfhs(new pcl::PointCloudpcl::FPFHSignature33);
fpfh.compute(*fpfhs);
八、点云重建
-
算法原理 :点云重建是将离散点云恢复为连续曲面网格。常用方法有Poisson重建 、贪心投影三角化(Greedy Triangulation) 、Ball Pivoting 等。
- Poisson重建 :将点云及法线视为离散采样,求解隐式函数使其等值面通过点云。最后用Marching Cubes提取网格。输出网格顶点非原始点云顶点,而是隐式曲面上的新顶点。
- 贪心投影三角化:基于向外扩展投影,适合规整采样点云。
-
PCL接口:如Poisson重建示例:
// 假设cloud_with_normals为带法线的点云
pcl::Poissonpcl::PointNormal poisson;
poisson.setDepth(9);
poisson.setInputCloud(cloud_with_normals);
pcl::PolygonMesh mesh;
poisson.reconstruct(mesh); -
CloudCompare操作 :可用Mesh→Delaunay 2.5D 生成基于XY平面的三角网格;也可通过Edit→Mesh菜单下其他工具(如扫描生成网格)。软件界面无需编程即可快速查看结果。
-
ROS集成:一般在线系统中少做大规模重建,多在离线构建阶段使用。若集成,可在ROS节点调用上述重建算法,输出网格格式。
-
参数调优 :Poisson的
depth决定体素分辨率,高depth产出细节多但耗时多;point_weight影响点对隐式场的影响。 -
复杂度:Poisson重建需要构建八叉树并求解线性系统,复杂度较高,通常几秒至几分钟,取决于点数和深度。
-
优缺点:Poisson生成平滑闭合网格,可自填洞;缺点是数据密集时计算量大,结果顶点与原点云不同。贪心三角化可保持点原样,但对噪声敏感。
-
常见问题:需要点云有法线且密集分布;边缘和空洞可能出现多余面片;重建前推荐滤波和裁剪。
-
应用场景 :
- 逆向工程:由扫描仪点云恢复工件表面模型,用于3D打印或精密测量。
- 建筑建模:将室内/建筑点云重建为墙面、柱子网格。
- 虚拟现实:扫描景物并重建可渲染模型。
-
示例:
// Poisson 重建示例
pcl::Poissonpcl::PointNormal poisson;
poisson.setDepth(8);
poisson.setSolverDivide(8);
poisson.setIsoDivide(8);
poisson.setPointWeight(4.0f);
poisson.setInputCloud(cloud_with_normals);
pcl::PolygonMesh mesh;
poisson.reconstruct(mesh);
// 注意:网格顶点已重建,不直接等于原点云顶点
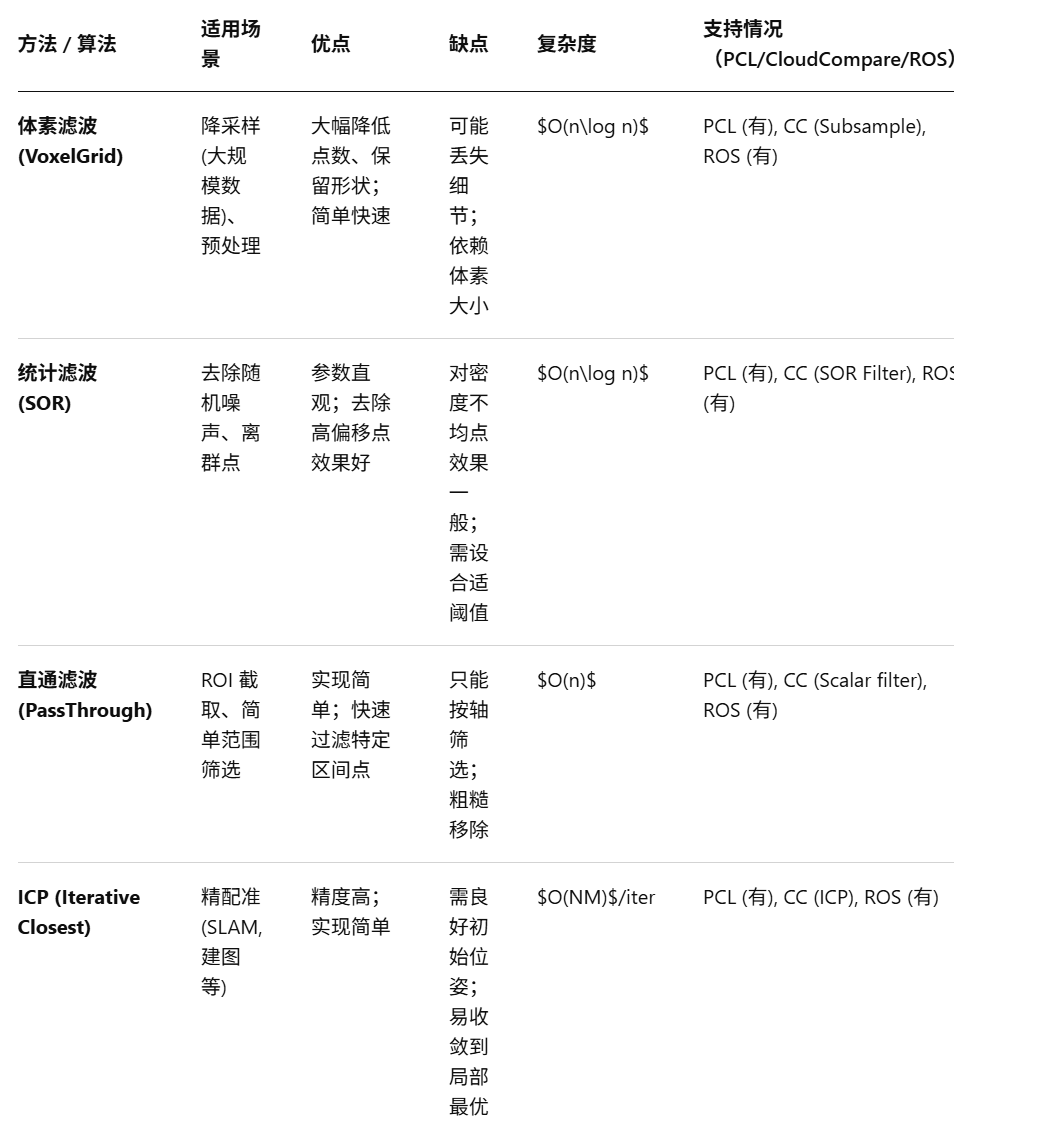
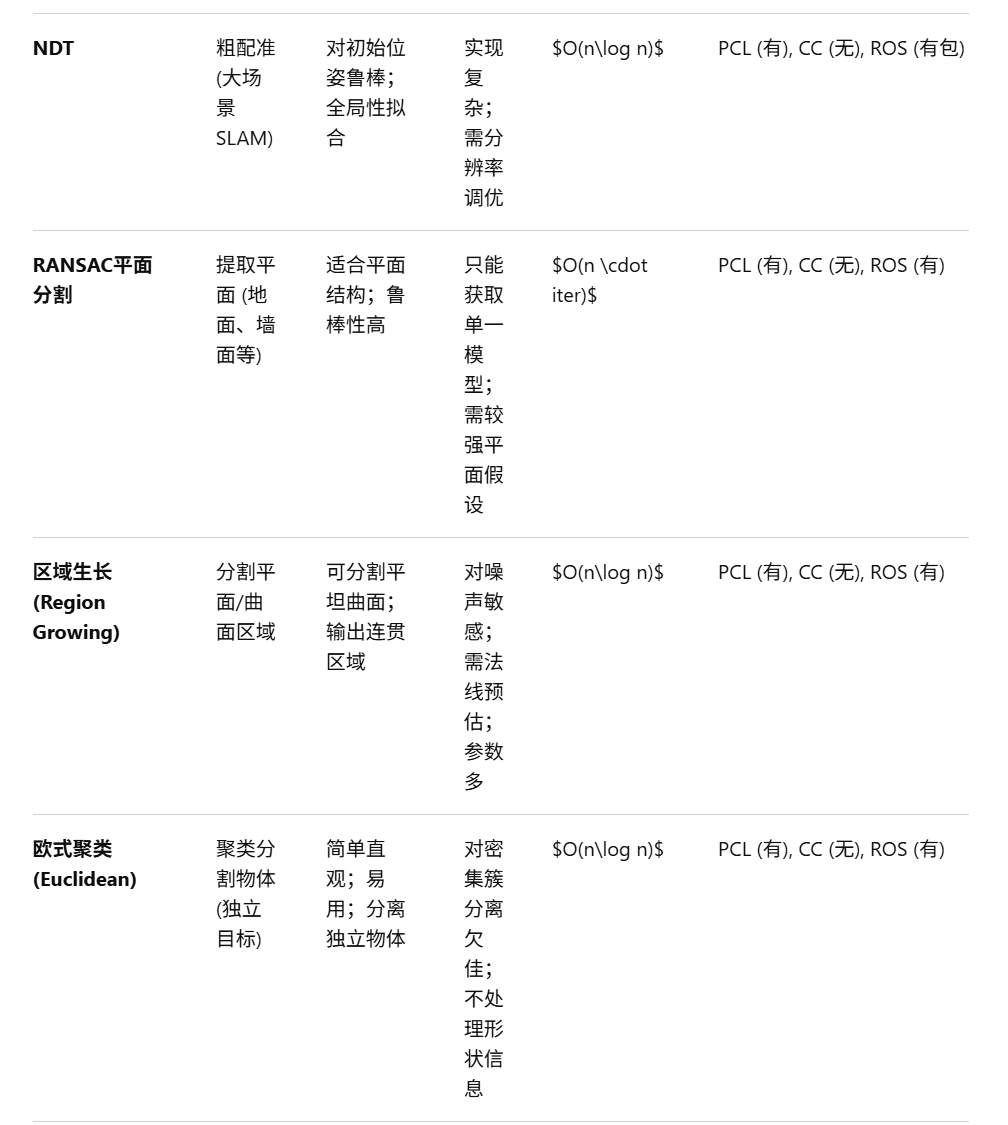
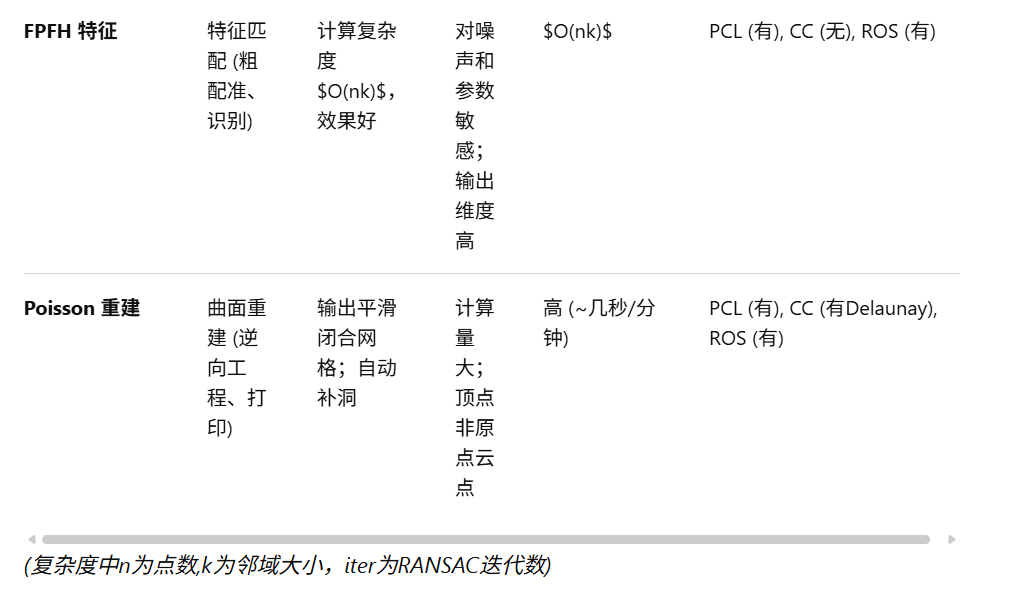
九、算法对比表