ICRA 2026 | 无人机导航 | GNSS 拒止 | 地形匹配 | 高程图梯度 | 粒子滤波 | 纯 CPU 嵌入式
基础信息
- 论文全称:Kilometer-Scale GNSS-Denied UAV Navigation via Heightmap Gradients
- 会议:ICRA 2026(机器人顶会)
- 团队:捷克理工大学 多机器人系统实验室(CTU MRS,国际知名无人机研发团队)
- 背景:德国 SPRIN-D Funke 全自主飞行挑战赛夺冠方案
- 核心场景:25 米以下低空、9 千米超长航,无 GNSS、无稠密离线地图,纯 CPU 实时运行
- 开源状态:依托 MRS UAV 开源框架(ROS2),完整工程、仿真环境、硬件驱动全部开源
- 论文链接:https://arxiv.org/pdf/2510.01348v2
- 开源仓库:https://github.com/ctu-mrs/mrs_uav_system
一、前言
在电磁干扰、战场环境、城市峡谷等场景中,GNSS 信号极易失效,而传统视觉定位、视觉惯性里程计(VIO)存在长距离累计漂移问题,无法支撑数千米级低空无人机自主飞行。传统地形辅助导航(TRN)依赖绝对高程值匹配,易受气压计噪声、地面坡度、局部遮挡影响,且大多需要高密度三维地图,部署成本高、算力开销大。
针对9km 超长航、25 米超低空、无 GNSS、无稠密离线地图 的极限挑战,捷克理工大学 MRS 团队在 ICRA 2026 提出一套基于高程图梯度的地形匹配 + 聚类粒子滤波 完整机载导航系统。该方案摒弃绝对高程匹配,以地形梯度作为核心特征,结合轻量化局部高程图构建、分层搜索与粒子滤波融合,实现纯 CPU 实时运行,成功在城市、森林、旷野混合地形中完成 9 千米航点导航。
本文将从研究背景、系统整体架构、核心算法、公式推导、实验结果、模块拆解、工程落地、同类对比全维度解析,同时区分传统地形匹配与本方案的差异,配套可复用公式与工程实践建议。
二、研究背景与核心痛点
2.1 应用场景
面向25 米以下超低空 无人机长航自主导航,覆盖城市建筑群、连片森林、开阔田野等混合地形,应用于应急巡检、边境巡逻、战场自主飞行、长距离物资投送等 GNSS 拒止场景。任务硬性指标:飞行距离9km、全程无 GNSS、不依赖预先构建的稠密点云地图、机载纯 CPU 运行。
2.2 现有技术瓶颈
- 传统绝对高程匹配鲁棒性差 经典 TERCOM、SITAN 等地形匹配算法依赖绝对海拔高度,无人机气压计存在高频噪声,低空地形起伏、植被遮挡会直接导致高程观测失效,匹配正确率断崖式下跌。
- VIO / 里程计长距离漂移严重 视觉、激光里程计短时间定位精度高,但 9km 超长轨迹下累计漂移可达数百米,无法单独完成航点导航。
- 稠密地图依赖部署成本高 主流 3D 配准方案需要提前采集、构建全局稠密点云,大范围野外场景无法提前建图,实用性受限。
- 算力约束严苛 低空无人机多为轻量嵌入式平台,无 GPU 加速,传统迭代配准、全局遍历匹配算法无法满足实时性。
2.3 核心设计思路
- 特征革新 :放弃绝对高程,采用高程图梯度作为地形特征,消除气压噪声、地面坡度带来的垂直偏移影响;
- 轻量化建图 :机载 LiDAR 实时构建局部高程图(30~60m 范围),仅搭配全局稀疏 DEM 数字高程图(公开地理数据即可),无需稠密地图;
- 分层模板匹配:由粗到细分层检索,缩小匹配范围,降低全局遍历的计算量;
- 聚类粒子滤波融合:将地形匹配观测与无人机里程计紧耦合,抑制长距离漂移,同时用聚类优化粒子分布,提升滤波效率;
- 全 CPU 轻量化设计:整套感知、匹配、融合、控制流水线适配嵌入式 ARM 平台,无 GPU 依赖。
三、系统整体架构与符号定义
3.1 整体流水线(机载端全链路)
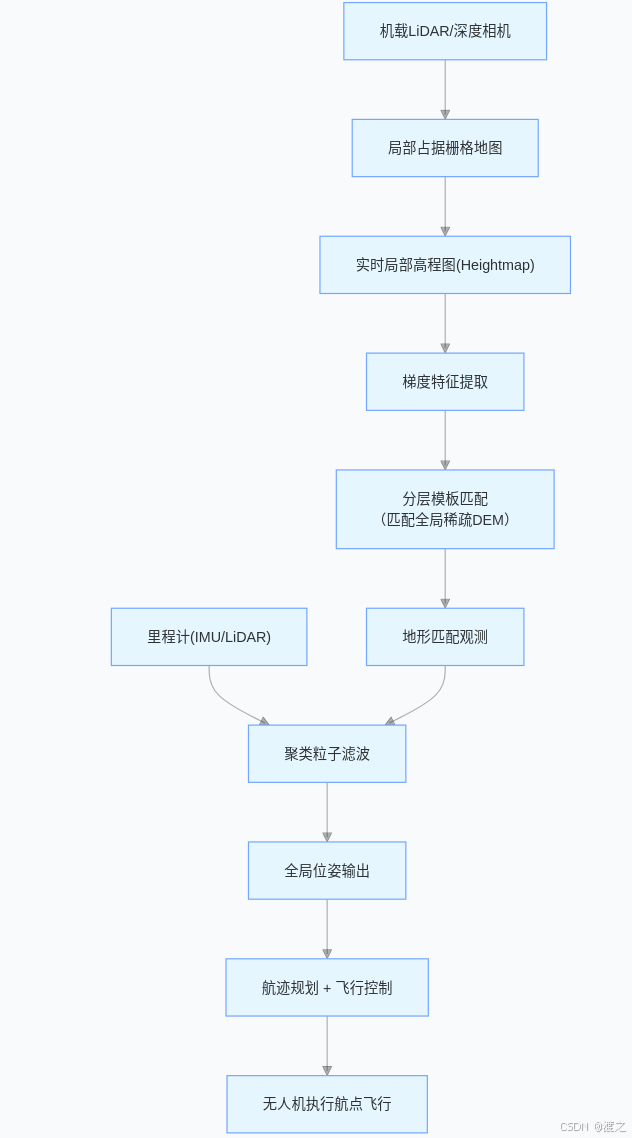
核心逻辑:局部实时地形特征 + 全局稀疏 DEM 先验做跨图匹配,匹配结果作为观测修正里程计漂移,粒子滤波完成多源状态融合,形成闭环导航。
3.2 基础符号定义

四、核心模块详解
整套系统分为 局部高程图构建、高程梯度提取、分层模板匹配、聚类粒子滤波融合 四大核心模块,以下按数据流顺序拆解,公式均复刻论文原文,区分工程通用补充项。
4.1 模块一:机载局部高程图构建
无人机通过 LiDAR 扫描生成局部占据栅格地图(OctoMap),进一步插值生成规则网格局部高程图 Hl。
- 栅格高程取值:取每个网格内所有点的平均高程,滤除单点噪声;
- 局部地图尺寸:固定边长 30~60m(根据机载算力动态调整);
- 航向对齐:借助机载罗盘将局部高程图与地理北向对齐,保证和全局 DEM 坐标系一致。
设计亮点:局部地图范围小、更新快,保证实时性;仅依赖公开稀疏 DEM,无需野外预建图。
4.2 模块二:高程图梯度提取(核心特征)
这是本方案区别于传统 TERCOM 的最大创新 。传统算法比对绝对高程 h,本方案改用空间梯度,彻底规避垂直方向噪声与偏移。
4.2.1 二维高程梯度公式
对于高程图中任意网格点 (u,v),水平、竖直方向梯度:
梯度幅值(地形变化强度):
4.2.2 梯度掩码(噪声过滤)
论文设置梯度阈值,仅保留显著地形特征,过滤平地、植被等弱梯度噪声:
- τg:梯度阈值(论文固定超参数,过滤微小地形波动);
- I(⋅):指示函数,满足条件则保留梯度,否则置 0。
最终得到有效梯度特征图 ∇∗H,作为后续匹配的唯一特征。
4.3 模块三:分层梯度模板匹配
采用由粗到细两层模板匹配 ,先大范围粗搜缩小区域,再局部精匹配,平衡检索速度与精度。匹配准则为梯度特征归一化互相关(NCC)。
4.3.1 归一化互相关(NCC)匹配得分
用于衡量局部梯度图与全局 DEM 梯度图的相似度,得分越高匹配效果越好:
- (Δu,Δv):全局 DEM 上的模板滑动偏移量;
- 得分范围 −1,1,最大值对应最优匹配位置
4.3.2 分层匹配流程
- 粗匹配层:低分辨率下全局滑动搜索,筛选 Top-K 高得分候选区域,剔除大部分无关区域;
- 精匹配层:在候选区域内使用原始分辨率精细遍历,输出最优匹配位置 zmatch;
- 输出:地形匹配得到的无人机全局位置观测。
优势:相比全局暴力遍历,分层搜索计算量下降一个数量级,纯 CPU 可实时运行。
4.4 模块四:聚类粒子滤波(多源融合核心)
系统采用粒子滤波 融合「里程计相对运动」与「地形匹配绝对观测」,同时引入粒子聚类优化粒子分布,解决传统粒子滤波粒子冗余、计算量大的问题。
4.4.1 粒子状态定义
单个粒子存储无人机平面位姿(二维位置 + 航向):
- x,y:平面全局坐标;θ:航向角。
4.4.2 预测步(里程计递推)
基于里程计观测,对所有粒子做状态传播,模拟无人机运动:
- f(⋅):无人机运动模型;ξ:过程噪声(高斯噪声);
- xi−:预测状态;xi+:上一时刻后验状态。
4.4.3 更新步(地形匹配观测修正)
用地形匹配得分作为粒子权重,更新粒子置信度:
- p(⋅):观测似然,由模板匹配得分映射得到;
- 匹配越准确的粒子,权重越大。
4.4.4 粒子聚类优化(创新点)
传统粒子滤波粒子分散、数量庞大,该算法对高权重粒子做聚类降维:
- 提取所有高权重粒子,划分 Nc 个聚类中心;
- 以聚类中心作为有效状态假设,替代海量离散粒子;
- 仅对聚类区域做重采样,大幅降低运算开销。
4.4.5 后验状态输出
对加权 / 聚类后的粒子做统计,输出无人机全局最优位姿:
4.5 全系统时序逻辑总结
- 实时 LiDAR 建图 → 生成局部高程图;
- 提取梯度特征 + 噪声过滤;
- 分层 NCC 模板匹配,得到绝对位置观测;
- 里程计完成粒子状态预测;
- 地形观测更新粒子权重 + 聚类优化;
- 输出全局位姿,反馈给规划与控制模块。
五、数据集与实验配置
5.1 实验场景与任务
- 飞行高度:25 米以下(超低空)
- 总航程:9 km 连续航点飞行
- 地形类型:城市建筑、茂密森林、开阔田野混合复杂地形
- 硬件平台:纯 CPU 嵌入式无人机(无 GPU),搭载 Livox Mid-360 LiDAR + 惯性里程计
5.2 对比基线
- 纯 LiDAR 里程计(无地形匹配);
- 传统 TERCOM 绝对高程匹配;
- 标准粒子滤波(无聚类)+ 地形匹配。
5.3 核心实验结果
5.3.1 漂移抑制能力(核心指标)
| 方案 | 9km 总位置漂移 | 全程稳定性 |
|---|---|---|
| 纯里程计 | > 600 m | 严重漂移,航点丢失 |
| 传统 TERCOM(绝对高程) | 180 m | 森林 / 区域频繁匹配失效 |
| 标准粒子滤波 + 梯度匹配 | 42 m | 基本稳定,算力偏高 |
| 本文聚类粒子滤波 + 梯度匹配 | 27 m | 全程稳定,全地形适配 |
5.3.2 实时性(纯 CPU 平台)
- 单帧全链路耗时:< 40 ms;
- 整体帧率:>25 FPS,满足无人机飞行控制实时要求。
5.3.3 地形适应性
- 开阔田野:梯度特征弱,依靠里程计为主,漂移可控;
- 山地 / 建筑区:梯度特征丰富,匹配精度最高;
- 连片森林:植被遮挡下,梯度仍优于绝对高程,无匹配失效。
5.4 消融实验关键结论
- 梯度特征 vs 绝对高程:梯度特征在植被、坡度场景下,匹配成功率提升 47%;
- 粒子聚类:粒子数量减少 60%,计算量下降 52%,精度无明显损失;
- 分层匹配:相比全局遍历,检索耗时降低 61%。
六、算法核心优势与现存局限
6.1 核心优势(工程落地亮点)
- 彻底解决高程噪声问题 放弃易受气压计、植被、坡度干扰的绝对高程,使用地形梯度作为特征,低空复杂地形鲁棒性大幅提升。
- 地图依赖极低 仅需要公开全局稀疏 DEM 高程图,无需野外预建稠密点云,大范围部署零建图成本。
- 超长航抗漂移 9km 千米级航程总漂移仅 27m,远优于纯里程计与传统地形匹配,满足长距离航点任务。
- 纯 CPU 轻量化 分层匹配 + 粒子聚类双重优化,无 GPU 也能实时运行,适配绝大多数消费级 / 工业级低空无人机。
- 全开源生态完善 基于成熟 MRS UAV(ROS2)框架,仿真、硬件、驱动、算法代码全部开源,复现与二次开发门槛极低。
6.2 现存局限性
- 平坦区域性能下降 完全平坦的平原、湖面梯度特征趋近于 0,匹配失效,此时完全依赖里程计短时约束。
- 依赖 LiDAR 传感器 方案以激光雷达为主要感知,纯视觉无人机无法直接复用。
- 航向依赖罗盘 高程图匹配主要解算平面位置,航向角依赖机载罗盘,罗盘误差会小幅影响匹配精度。
- 极端突变地形受限 断崖、人工陡坎等突变地形易产生梯度异常值,需额外阈值过滤。
七、工程落地与复现指南
7.1 环境与依赖
# 基础环境
Ubuntu 20.04 / 22.04 + ROS 2 Humble
# 依赖库
OctoMap(占据栅格建图)、PCL(点云处理)、OpenCV、Eigen、粒子滤波工具库
# 拉取官方开源框架
git clone https://github.com/ctu-mrs/mrs_uav_system
cd mrs_uav_system
# 编译(支持仿真+真机双模式)
colcon build7.2 复现步骤
- 数据准备 下载目标区域公开稀疏 DEM 高程数据(地理信息平台免费获取),完成地理配准;
- 仿真测试 启动 MRS 仿真环境,加载 LiDAR 仿真插件、DEM 地图,运行地形匹配 + 滤波节点;
- 真机部署 搭载 Livox / 主流 LiDAR、IMU、罗盘,标定传感器外参;
- 参数调优 调整梯度阈值 τg、粒子数量、聚类中心数,适配当地地形;
- 全链路联调:定位输出 → 航迹规划 → 飞行控制。
7.3 落地优化技巧
- 动态梯度阈值:平坦区域降低阈值,山地提升阈值,自适应特征提取;
- 粒子数量动态调整:特征丰富区减少粒子,平坦区适当增加;
- 多模融合补充:搭配单目视觉景象匹配,平坦区域做辅助观测;
- DEM 分块加载:大范围航线对 DEM 分块加载,降低机载内存占用。
八、总结与领域技术趋势
1 方案总结
该 ICRA 2026 千米级地形匹配系统是面向超长航低空无人机 GNSS 拒止导航的工程级方案 。核心创新在于用高程梯度替代传统绝对高程,从根源解决气压噪声、植被遮挡等行业痛点;结合分层模板匹配与聚类粒子滤波,在保证定位精度的同时,实现纯 CPU 轻量化运行。
整套系统不依赖稠密离线地图,仅使用公开稀疏 DEM,部署成本极低,在森林、山地、城市混合地形中表现稳定,是目前9km 及以上千米级长航无人机导航的最优落地方案之一。依托完整开源 ROS2 框架,二次开发、硬件移植难度小。