只是配置一下CAN多邮箱的过程记录
引脚更改:
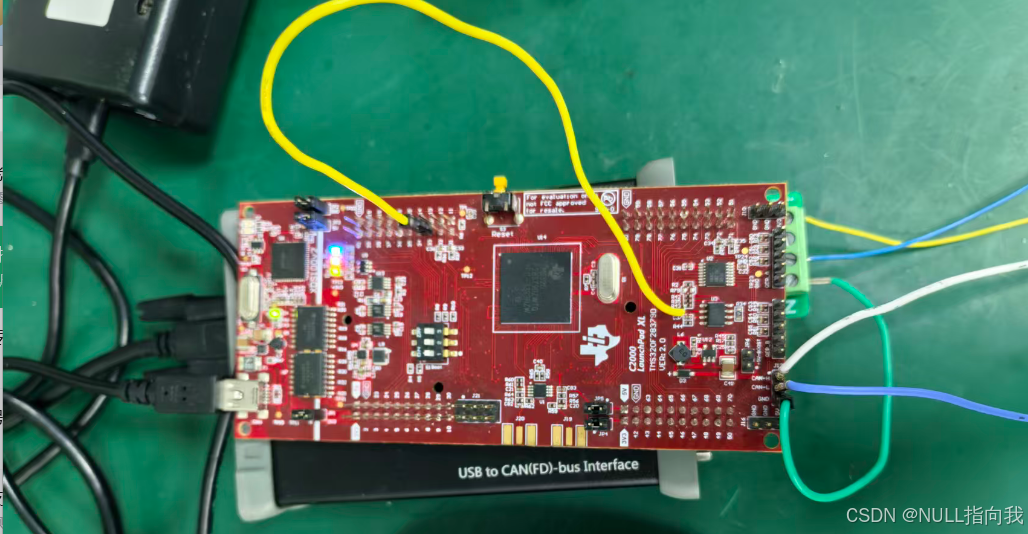
相较于上篇代码,这里引脚已经改掉一个,在launchpad开发板也飞线接过去了:
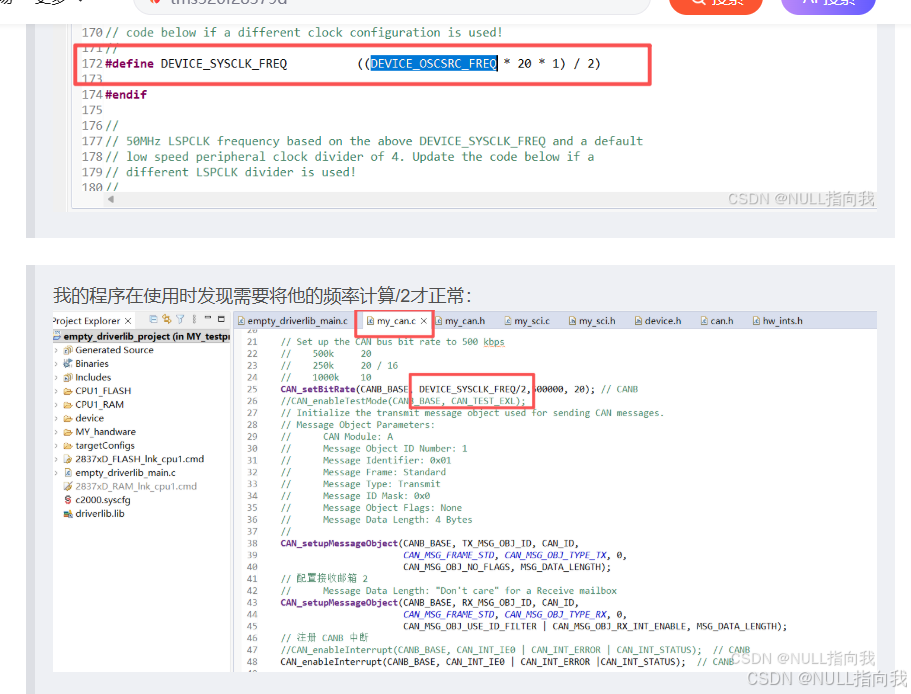
关于CPU频率的问题:
之前文章解决方法,是把传值给除以2了
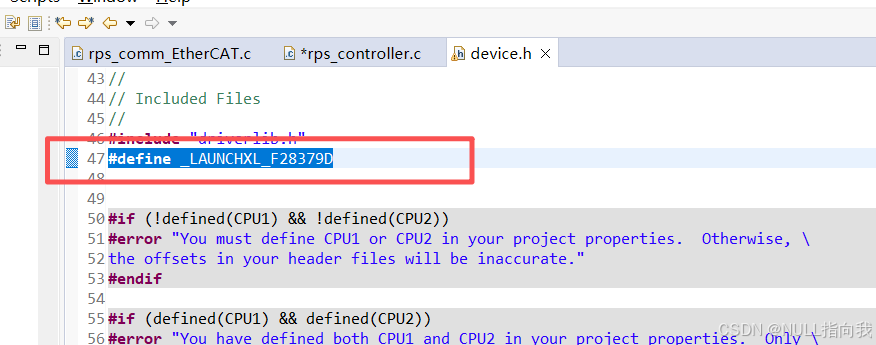
实际只要定义好了宏就行:在device.h文件:
cpp#define _LAUNCHXL_F28379D1
#include "device_hal_can.h"
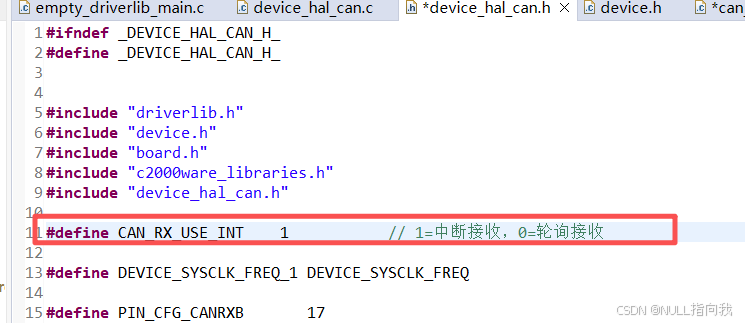
这里我加了开启中断接收与否的宏:
不开就要用轮询方式主动读取邮箱了:
cppcan轮询接收函数: CAN_readMessage(CANB_BASE, RX_MSG_OBJ2, rxData_Obj2); CAN_readMessage(CANB_BASE, RX_MSG_OBJ3, rxData_Obj3); CAN_readMessage(CANB_BASE, RX_MSG_OBJ4, rxData_Obj4); CAN_readMessage(CANB_BASE, RX_MSG_OBJ5, rxData_Obj5); CAN_readMessage(CANB_BASE, RX_MSG_OBJ6, rxData_Obj6);
cpp
#include "device_hal_can.h"
uint16_t txMsgData[8];
uint16_t txMsgData2[8];
uint16_t rxData_Obj2[CAN_DATA_LEN];
uint16_t rxData_Obj3[CAN_DATA_LEN];
uint16_t rxData_Obj4[CAN_DATA_LEN];
uint16_t rxData_Obj5[CAN_DATA_LEN];
uint16_t rxData_Obj6[CAN_DATA_LEN];
static void Config_CAN_GPIO(void)
{
GPIO_setPinConfig(GPIO_CFG_CANRXB); // CANB RX
GPIO_setPinConfig(GPIO_CFG_CANTXB); // CANB TX
GPIO_setControllerCore(PIN_CFG_CANTXB, GPIO_CORE_CPU1);
GPIO_setPadConfig(PIN_CFG_CANTXB, GPIO_PIN_TYPE_STD);
GPIO_setControllerCore(PIN_CFG_CANRXB, GPIO_CORE_CPU1);
GPIO_setPadConfig(PIN_CFG_CANRXB, GPIO_PIN_TYPE_PULLUP);
}
void RPS_HAL_SetupCan(void)
{
txMsgData[0] = 0x55;txMsgData[1] = 0xff;txMsgData[2] = 0x55;txMsgData[3] = 0xff;
txMsgData[4] = 0x55;txMsgData[5] = 0xff;txMsgData[6] = 0x55;txMsgData[7] = 0xff;
txMsgData2[0] = 0x12;txMsgData2[1] = 0x34;txMsgData2[2] = 0x56;txMsgData2[3] = 0x78;
txMsgData2[4] = 0x21;txMsgData2[5] = 0x43;txMsgData2[6] = 0x65;txMsgData2[7] = 0x87;
Config_CAN_GPIO();
// Initialize the CAN controllers
CAN_initModule(CANB_BASE);
CAN_disableTestMode(CANB_BASE);
// Set up the CAN bus bit rate to 1Mbps
// 500k 20
// 250k 20 / 16
// 1000k 10
// CAN_setBitRate(CANB_BASE,DEVICE_SYSCLK_FREQ/2,500000, 20); // CANB
CAN_setBitRate(CANB_BASE,DEVICE_SYSCLK_FREQ_1,1000000, 10); // CANB
//CAN_enableTestMode(CANB_BASE, CAN_TEST_EXL);
// Initialize the transmit message object used for sending CAN messages.
// Message Object Parameters:
// CAN Module: A
// Message Object ID Number: 1
// Message Identifier: 0x01
// Message Frame: Standard
// Message Type: Transmit
// Message ID Mask: 0x0
// Message Object Flags: None
// Message Data Length: 4 Bytes
//
CAN_setupMessageObject(CANB_BASE, TX_MSG_OBJ_ID, CAN_ID,
CAN_MSG_FRAME_STD, CAN_MSG_OBJ_TYPE_TX, 0,
CAN_MSG_OBJ_NO_FLAGS, MSG_DATA_LENGTH);
// 配置接收邮箱 2
// Message Data Length: "Don't care" for a Receive mailbox
// 邮箱的 ID 过滤掩码是 0,不做任何过滤,接收所有 ID 的报文。
// CAN_setupMessageObject(CANB_BASE, RX_MSG_OBJ_ID, CAN_ID,
// CAN_MSG_FRAME_STD, CAN_MSG_OBJ_TYPE_RX, 0,
// CAN_MSG_OBJ_USE_ID_FILTER | CAN_MSG_OBJ_RX_INT_ENABLE, MSG_DATA_LENGTH);
// 邮箱2:接收中断使能 / 掩码 0x7FF(严格全匹配)
CAN_setupMessageObject(CANB_BASE, RX_MSG_OBJ2, CAN_RX_ID_OBJ2,
CAN_FRAME_STD, CAN_TYPE_RX, 0x7FF,
CAN_RX_COMMON_FLAGS, CAN_DATA_LEN);
// 邮箱3:
CAN_setupMessageObject(CANB_BASE, RX_MSG_OBJ3, CAN_RX_ID_OBJ3,
CAN_FRAME_STD, CAN_TYPE_RX, 0x7FF,
CAN_RX_COMMON_FLAGS, CAN_DATA_LEN);
// 邮箱4:
CAN_setupMessageObject(CANB_BASE, RX_MSG_OBJ4, CAN_RX_ID_OBJ4,
CAN_FRAME_STD, CAN_TYPE_RX, 0x7FF,
CAN_RX_COMMON_FLAGS, CAN_DATA_LEN);
// 邮箱5:
CAN_setupMessageObject(CANB_BASE, RX_MSG_OBJ5, CAN_RX_ID_OBJ5,
CAN_FRAME_STD, CAN_TYPE_RX, 0x7FF,
CAN_RX_COMMON_FLAGS, CAN_DATA_LEN);
// 邮箱6:
CAN_setupMessageObject(CANB_BASE, RX_MSG_OBJ6, CAN_RX_ID_OBJ6,
CAN_FRAME_STD, CAN_TYPE_RX, 0x7FF,
CAN_RX_COMMON_FLAGS, CAN_DATA_LEN);
// CANB 中断配置 仅中断模式开启
#if CAN_RX_USE_INT
CAN_enableInterrupt(CANB_BASE, CAN_INT_IE0 | CAN_INT_ERROR |CAN_INT_STATUS);
Interrupt_register(INT_CANB0, &canB_ISR);
Interrupt_enable(INT_CANB0);
CAN_enableGlobalInterrupt(CANB_BASE, CAN_GLOBAL_INT_CANINT0);
#endif
// Start CANB module operations
CAN_startModule(CANB_BASE);
}
#if CAN_RX_USE_INT
// 接收中断函数
__interrupt void canB_ISR(void)
{
uint32_t errReg;
uint32_t status;
status = CAN_getInterruptCause(CANB_BASE);
if(status == CAN_INT_INT0ID_STATUS)
{
errReg = CAN_getStatus(CANB_BASE);
if((errReg & 0x8000U) != 0U)
{
// 软复位CAN退出BUSOFF
CAN_initModule(CANB_BASE);
CAN_setBitRate(CANB_BASE, DEVICE_SYSCLK_FREQ_1,1000000, 10);
CAN_startModule(CANB_BASE);
}
}
else if(status == TX_MSG_OBJ_ID)
{
CAN_clearInterruptStatus(CANB_BASE, TX_MSG_OBJ_ID);
}
// 接收邮箱2
else if(status == RX_MSG_OBJ2)
{
CAN_readMessage(CANB_BASE, RX_MSG_OBJ2, rxData_Obj2);
CAN_clearInterruptStatus(CANB_BASE, RX_MSG_OBJ2);
}
// 接收邮箱3
else if(status == RX_MSG_OBJ3)
{
CAN_readMessage(CANB_BASE, RX_MSG_OBJ3, rxData_Obj3);
CAN_clearInterruptStatus(CANB_BASE, RX_MSG_OBJ3);
}
// 接收邮箱4
else if(status == RX_MSG_OBJ4)
{
CAN_readMessage(CANB_BASE, RX_MSG_OBJ4, rxData_Obj4);
CAN_clearInterruptStatus(CANB_BASE, RX_MSG_OBJ4);
}
// 接收邮箱5
else if(status == RX_MSG_OBJ5)
{
CAN_readMessage(CANB_BASE, RX_MSG_OBJ5, rxData_Obj5);
CAN_clearInterruptStatus(CANB_BASE, RX_MSG_OBJ5);
}
// 接收邮箱6
else if(status == RX_MSG_OBJ6)
{
CAN_readMessage(CANB_BASE, RX_MSG_OBJ6, rxData_Obj6);
CAN_clearInterruptStatus(CANB_BASE, RX_MSG_OBJ6);
}
CAN_clearGlobalInterruptStatus(CANB_BASE, CAN_GLOBAL_INT_CANINT0);
Interrupt_clearACKGroup(INTERRUPT_ACK_GROUP9);
}
#endif
cpp
#ifndef _DEVICE_HAL_CAN_H_
#define _DEVICE_HAL_CAN_H_
#include "driverlib.h"
#include "device.h"
#include "board.h"
#include "c2000ware_libraries.h"
#include "device_hal_can.h"
#define CAN_RX_USE_INT 1 // 1=中断接收,0=轮询接收
#define DEVICE_SYSCLK_FREQ_1 DEVICE_SYSCLK_FREQ
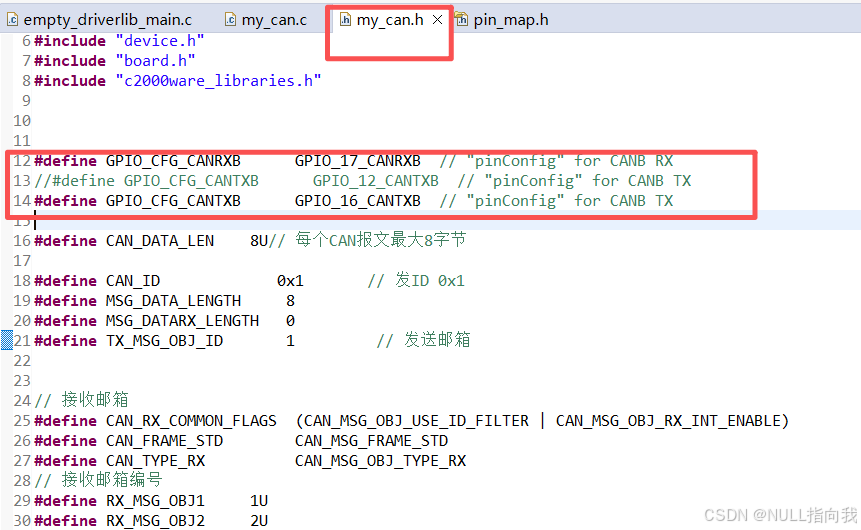
#define PIN_CFG_CANRXB 17
#define GPIO_CFG_CANRXB GPIO_17_CANRXB // "pinConfig" for CANB RX
//#define GPIO_CFG_CANTXB GPIO_12_CANTXB // "pinConfig" for CANB TX
#define PIN_CFG_CANTXB 16
#define GPIO_CFG_CANTXB GPIO_16_CANTXB // "pinConfig" for CANB TX
#define CAN_DATA_LEN 8U // 每个CAN报文最大8字节
#define CAN_ID 0x1 // 发ID 0x1
#define MSG_DATA_LENGTH 8
#define MSG_DATARX_LENGTH 0
#define TX_MSG_OBJ_ID 1 // 发送邮箱
// 接收邮箱标志 自动根据宏切换
#if CAN_RX_USE_INT
#define CAN_RX_COMMON_FLAGS (CAN_MSG_OBJ_USE_ID_FILTER | CAN_MSG_OBJ_RX_INT_ENABLE)
#else
#define CAN_RX_COMMON_FLAGS (CAN_MSG_OBJ_USE_ID_FILTER)
#endif
#define CAN_FRAME_STD CAN_MSG_FRAME_STD
#define CAN_TYPE_RX CAN_MSG_OBJ_TYPE_RX
// 接收邮箱编号
#define RX_MSG_OBJ1 1U
#define RX_MSG_OBJ2 2U
#define RX_MSG_OBJ3 3U
#define RX_MSG_OBJ4 4U
#define RX_MSG_OBJ5 5U
#define RX_MSG_OBJ6 6U
//对应邮箱的CAN-ID宏
#define CAN_RX_ID_OBJ1 0x01U
#define CAN_RX_ID_OBJ2 0x02U
#define CAN_RX_ID_OBJ3 0x03U
#define CAN_RX_ID_OBJ4 0x04U
#define CAN_RX_ID_OBJ5 0x05U
#define CAN_RX_ID_OBJ6 0x06U
extern uint16_t txMsgData[8];
extern uint16_t txMsgData2[8];
extern uint16_t rxData_Obj2[CAN_DATA_LEN];
extern uint16_t rxData_Obj3[CAN_DATA_LEN];
extern uint16_t rxData_Obj4[CAN_DATA_LEN];
extern uint16_t rxData_Obj5[CAN_DATA_LEN];
extern uint16_t rxData_Obj6[CAN_DATA_LEN];
void RPS_HAL_SetupCan(void);
#if CAN_RX_USE_INT
__interrupt void canB_ISR(void);
#endif
// 仅轮询模式使用,循环调用读取所有接收邮箱
void CANB_PollAllRxMailbox(void);
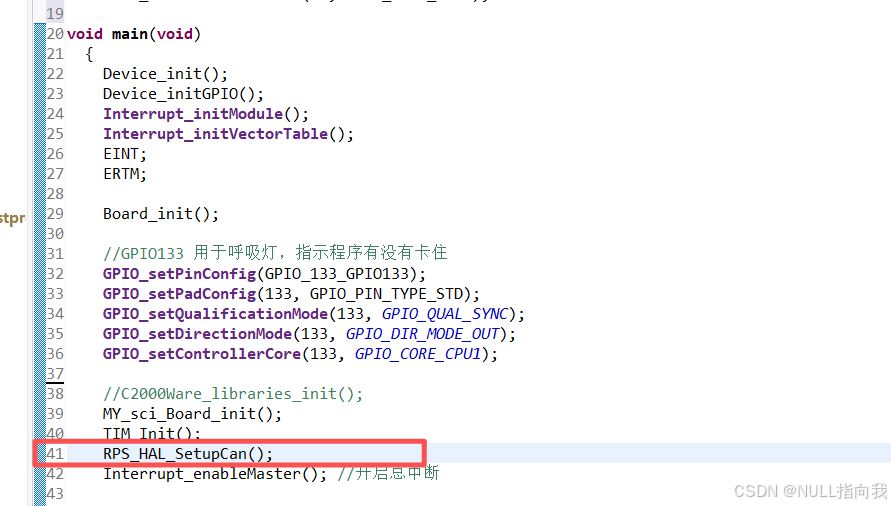
#endif主函数调用初始化:
CAN发送:
cpp
CAN_sendMessage(CANB_BASE, TX_MSG_OBJ_ID, MSG_DATA_LENGTH, txMsgData);
// Poll TxOk bit in CAN_ES register to check completion of transmission
//while(((HWREGH(CANB_BASE + CAN_O_ES) & CAN_ES_TXOK)) != CAN_ES_TXOK){}
delay_ms(10);
CAN_sendMessage(CANB_BASE, TX_MSG_OBJ_ID, MSG_DATA_LENGTH, txMsgData2);
// Poll TxOk bit in CAN_ES register to check completion of transmission
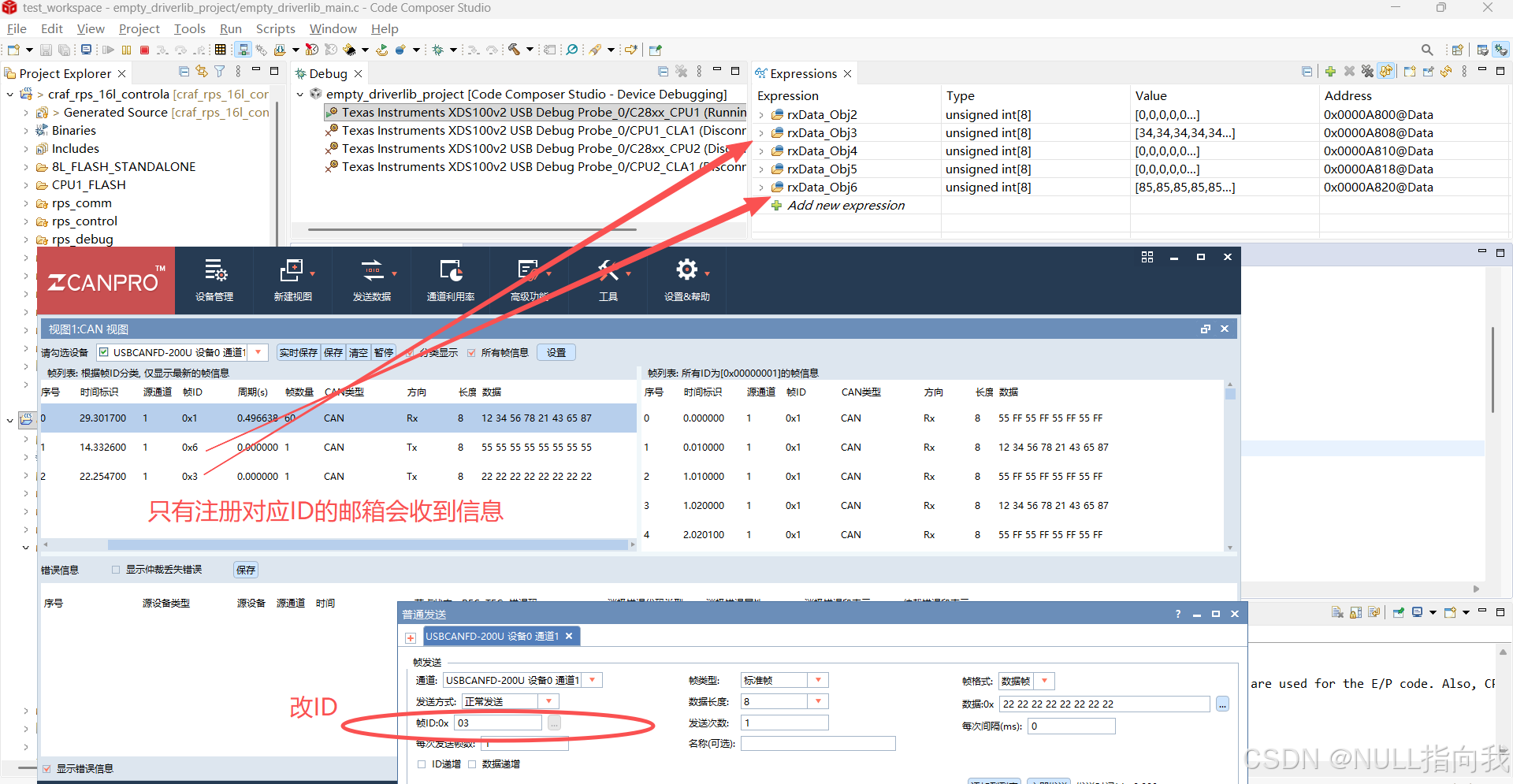
//while(((HWREGH(CANB_BASE + CAN_O_ES) & CAN_ES_TXOK)) != CAN_ES_TXOK){}测试结果:
打开DEBUG查看对应邮箱ID的接收buffer,看到能够对应上邮箱接收到信息: