Simulink中使用ROS1自定义消息
简介
最近在做的项目里需要使用Simulink 与ROS 联合仿真,这里就遇到了一个问题,Simulink 无法直接使用ROS 中的自定义消息,需要在MATLAB 中生成一下,再引入进MATLAB中才能使用,这里简单介绍下,并分享下过程里遇到了几个问题,给一些参考。
前提条件
系统:Windows11
MATLAB版本:2021b
ROS版本:ROS noetic
此外还需要下载Python2.7 、CMake 这两个版本倒没有什么要求,由于MATLAB 2021b 自带ROS Toolbox ,所以Robotics System Toolbox Interface for ROS Custom Messages 这个插件不需要下载,另一个要下载的是VS2019 ,这里要用到VS2019 里的编译器,而且VS2019 是支持MATLAB 2021b 的,换VS2022 的话要用更高版本的MATLAB,这里未作尝试,其实我觉得更高版本的MATLAB问题应该会少不少。
VS2019 的安装包我放在了gitee仓库,有需要可以去下载。
操作流程
参照matlab simulink与 ros通信时messgae注册教程。
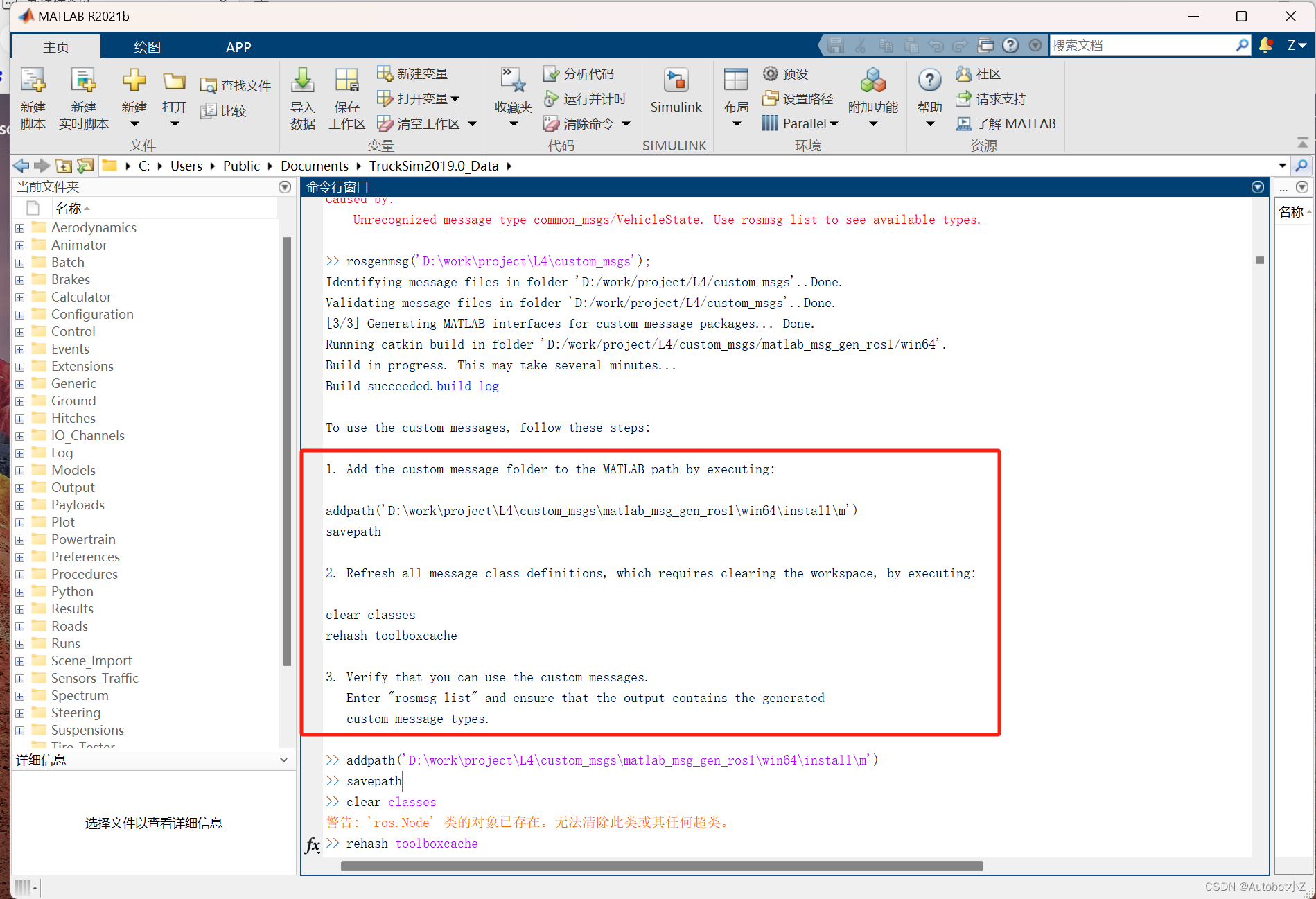
其实只要rosgenmsg 能执行完,按照MATLAB 提示进行操作就可以了,不过这之前还会遇到几个小问题。
问题一
首先就是执行rosgenmsg 报找不到Python ,即使安装Python 后在MATLAB 里使用pyversion 命令会显示我们安装的Python,这里也还是报错,这里需要使用命令手动设置一下,设置如下:
matlab
pyversion('C:\Python27\python.exe')问题二
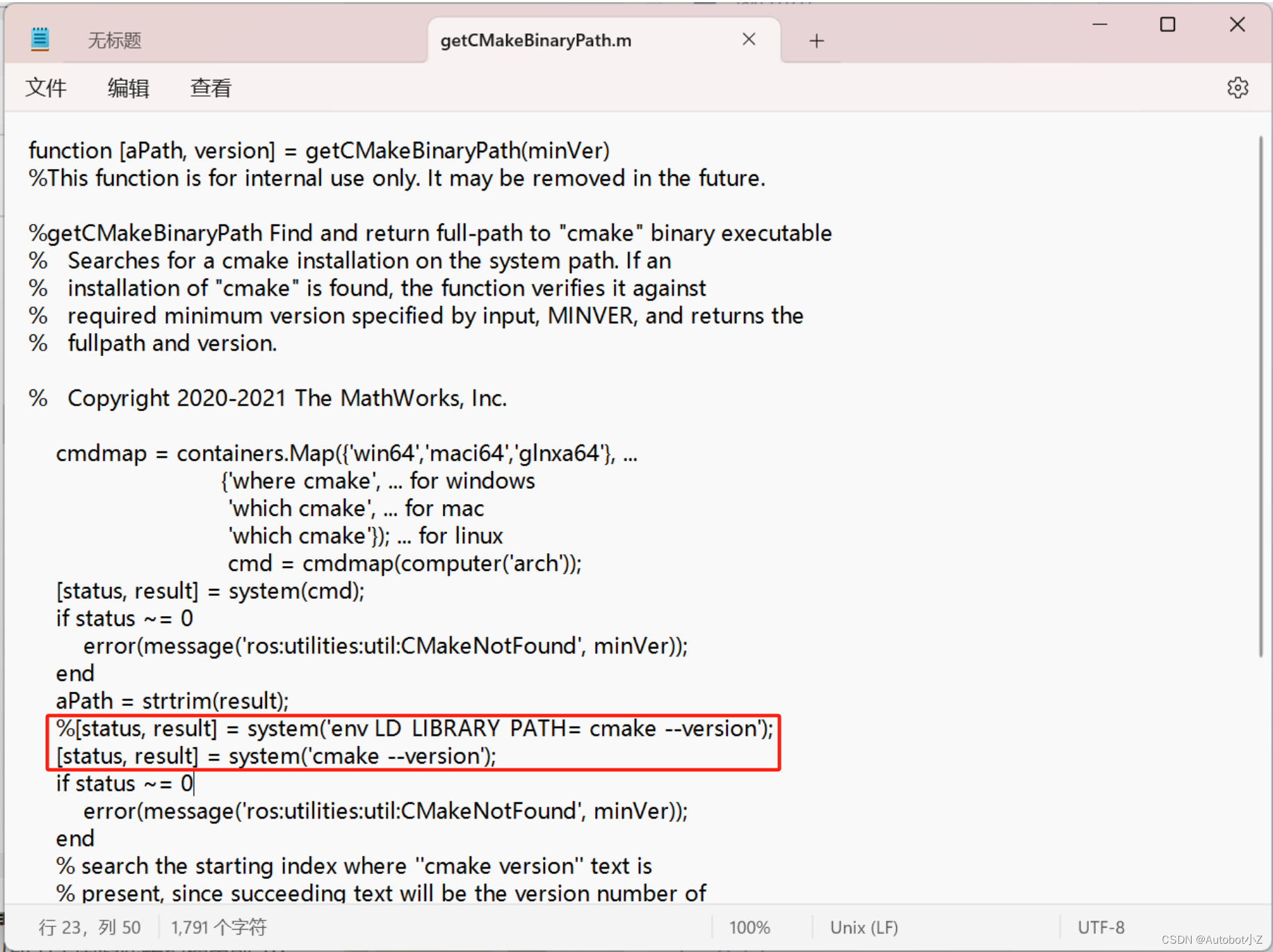
之后执行rosgenmsg 还会报找不到CMake,这里查到是因为MATLAB 2021b本身的bug,需要修改提示出错的那个.m文件,修改如下:
问题三
最后一个问题就是执行rosgenmsg 还会报没有编译器,这里试了直接用MinGW 发现还是不行,参考别人的经验发现可以使用VS2019 的编译器,只是不知道为什么在此之前还需要下载MinGW 的MATLAB 插件才能使用 mex -setup C++来选择VS2019的编译器,MinGW 的插件也放在了gitee仓库。
吐槽
近期实在有点搞,基本每天都是灵魂三问:"我是谁,我在哪,我在干什么",有点离谱,我一个做汽车电子嵌入式软件开发的被临时拉来要做自动驾驶,ROS ,Simulink ,TruckSim,人麻了QAQ。