原理部分
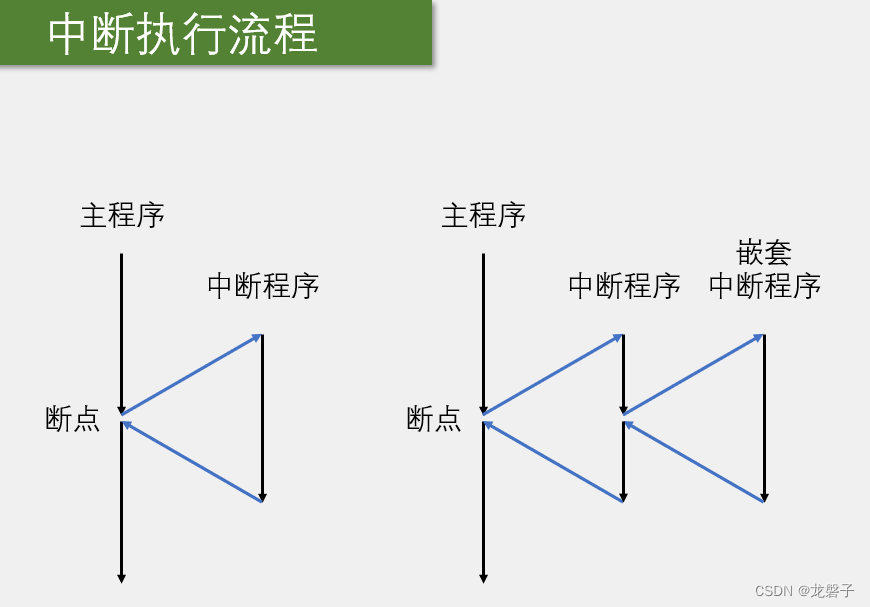
1中断示意图,中断会打断主函数的执行,终端执行完成之后再返回主函数继续执行
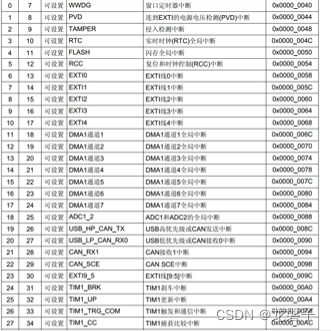
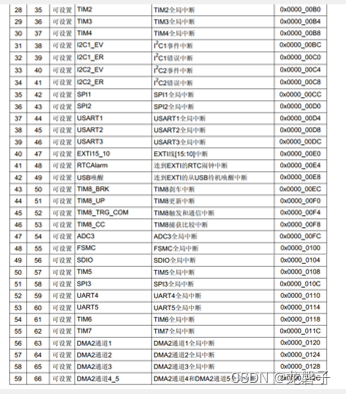
2.STM32中断
这些灰色的是内核中断
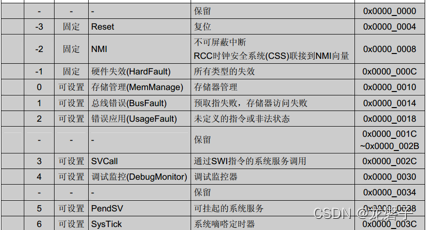
这些白色的是普通中断
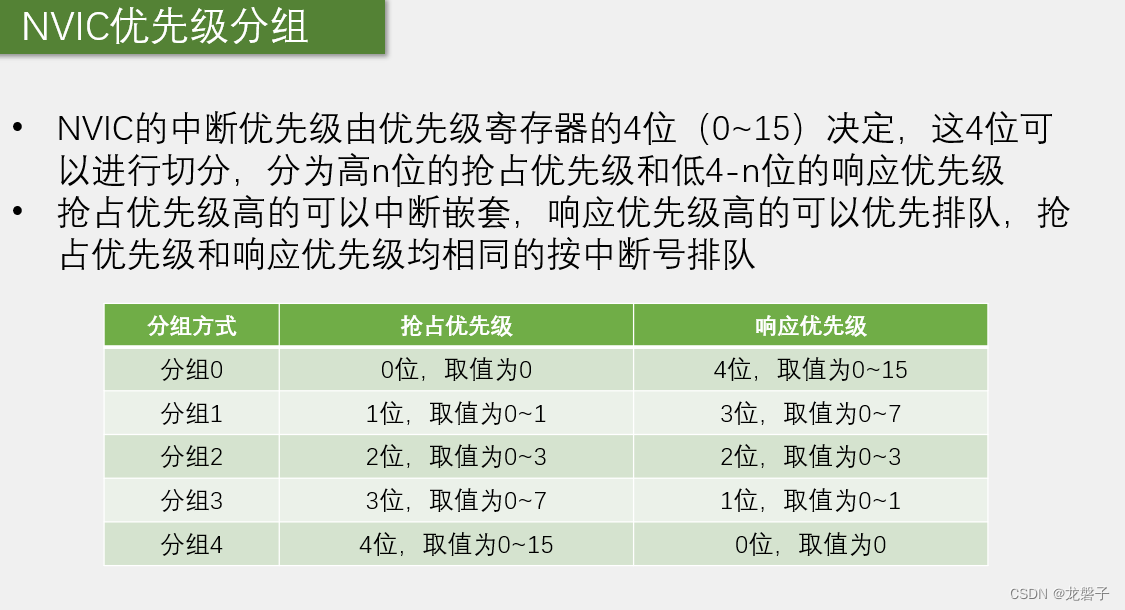
3.NVIC统一管理中断,每个中断通道都拥有16个可编程的优先等级,可对优先级进行分组,进一步设置抢占优先级和响应优先级
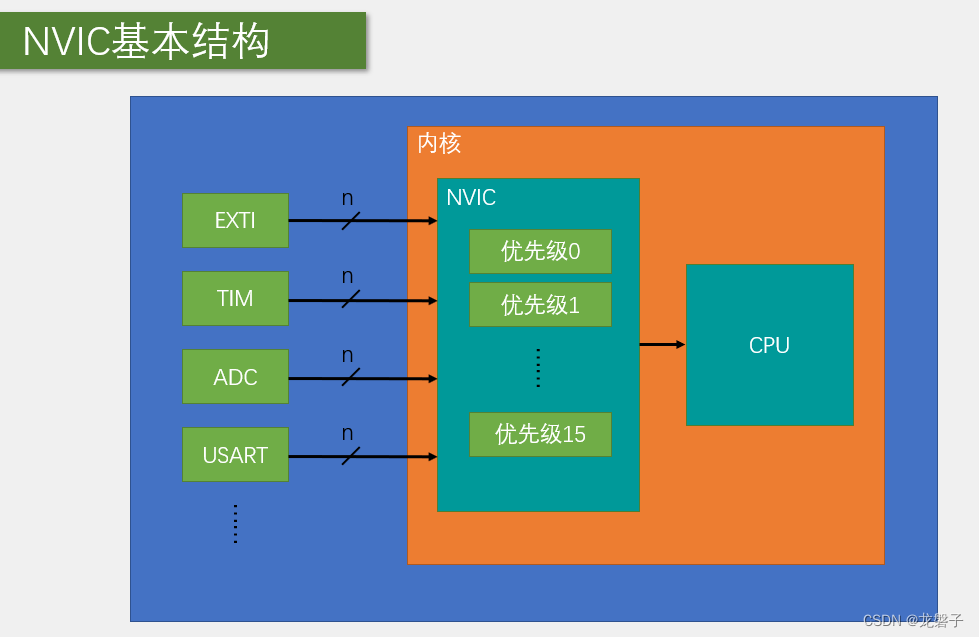
4.抢占优先级是表示可以直接插队让CPU执行,相当于急诊
响应优先级就是看谁的优先级高,等待CPU执行完当前任务之后就立马执行优先级最高的,相当于平时较重的疾病
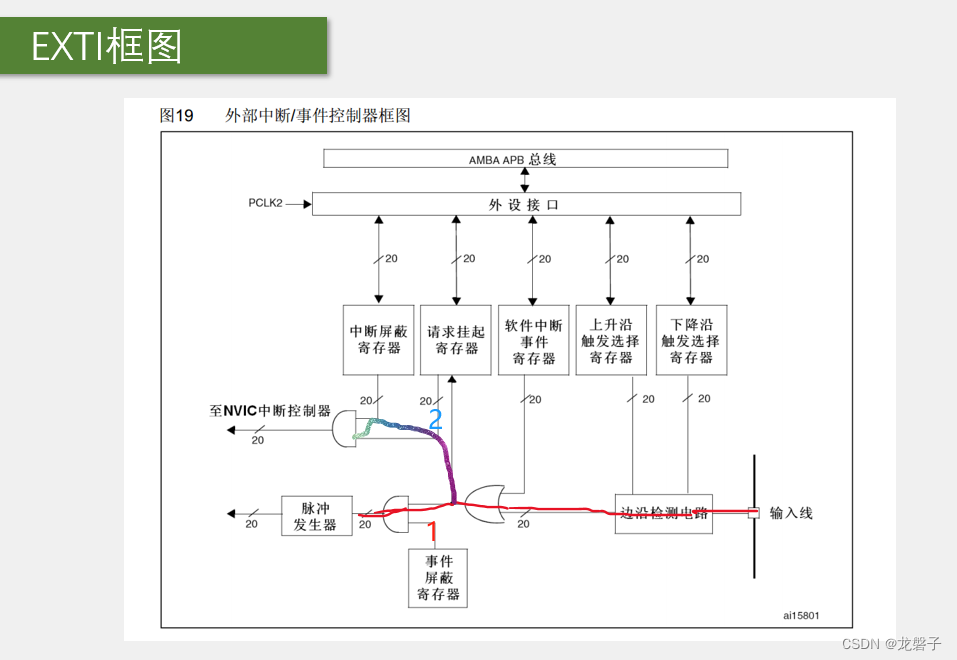
5.EXTI框图,最终有两个选择,第1个表示事件响应:触发别的外设操作。第2个表示中断:引脚电平触发中断
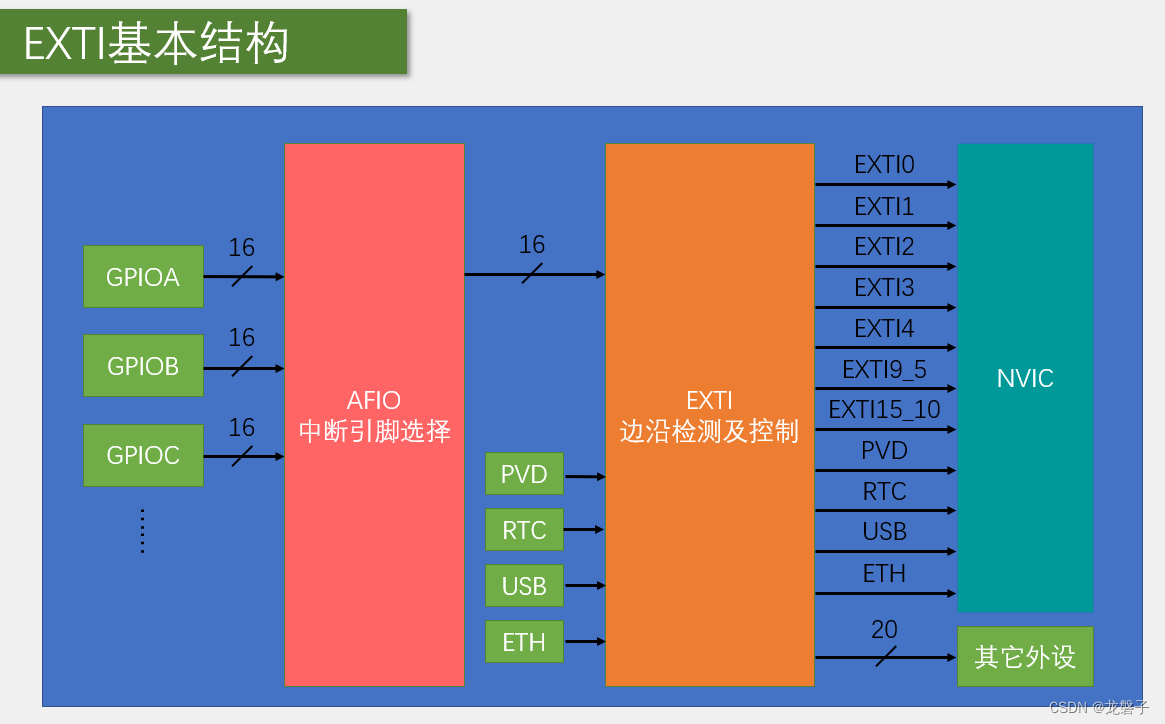
6.主要看此结构,打通一条GPIO到NVIC的中断通路就可以使用中断
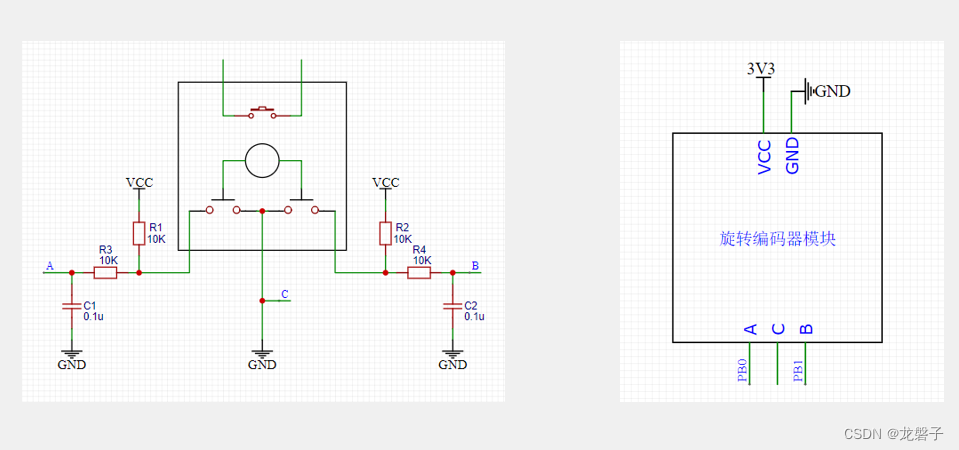
7.旋转编码器电路图
实验过程
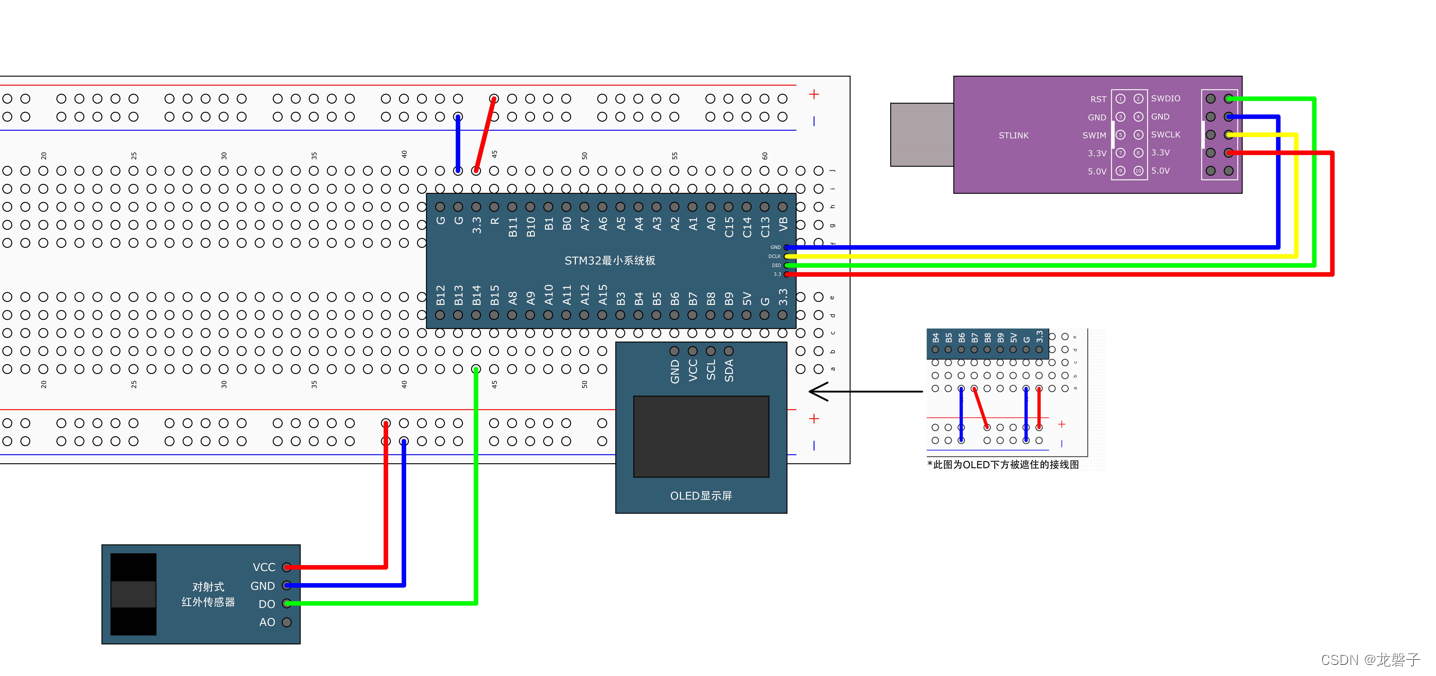
1.按照江科大老师给的电路链接图进行连接
2.在hardware中新建sensor.c和sensor.h文件夹
3.sensor.h代码如下
#ifndef _SENSOR__H
#define _SENSOR__H
void SENSOR_Init(void);
uint16_t turn(void);
#endif
4.sensor.c代码如下
#include "stm32f10x.h"
uint16_t CountSensor_Count;
void SENSOR_Init(void)
{
//使用各个外设前必须开启时钟,否则对外设的操作无效
//中断只需开始B口和AFIO即可,EXTI和NVIC无需开启时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); //开启GPIOB的时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE); //开启AFIO的时钟
/*GPIO初始化*/
GPIO_InitTypeDef GPIO_InitStructure; //定义结构体变量
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; //GPIO模式,赋值为上拉输出模式
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_14; //GPIO引脚,赋值为第1,2号引脚
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //GPIO速度,赋值为50MHz
GPIO_Init(GPIOB, &GPIO_InitStructure); //将赋值后的构体变量传递给GPIO_Init函数
//函数内部会自动根据结构体的参数配置相应寄存器
//实现GPIOB的初始化
/*AFIO选择中断引脚*/
//将外部中断的14号线映射到GPIOB,即选择PB14为外部中断引脚
//AFIO这个函数在GPIO那个里面
GPIO_EXTILineConfig(GPIO_PortSourceGPIOB, GPIO_PinSource14);
/*EXTI初始化*/
//这个在library中找一下
EXTI_InitTypeDef EXTI_InitStruct;
EXTI_InitStruct.EXTI_Line=EXTI_Line14; //选择哪个口
EXTI_InitStruct.EXTI_Mode=EXTI_Mode_Interrupt; //中断
EXTI_InitStruct.EXTI_Trigger=EXTI_Trigger_Rising; //这个需要搜索一下EXTI_Trigger,现在是上升沿触发
EXTI_InitStruct.EXTI_LineCmd=ENABLE; //中断打开
EXTI_Init(&EXTI_InitStruct);
//NVIC在初始化之前需要指定中断优先级分组
/*NVIC中断分组*/
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
/*NVIC初始化*/
NVIC_InitTypeDef NVIC_InitStruct;
NVIC_InitStruct.NVIC_IRQChannel=EXTI15_10_IRQn; //选择配置NVIC的EXTI15_10线,因为那个14号线过来的在10-15以内
NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority=1; //这个是自己给的,值越低优先级越高
NVIC_InitStruct.NVIC_IRQChannelSubPriority=1;
NVIC_InitStruct.NVIC_IRQChannelCmd=ENABLE;
NVIC_Init(&NVIC_InitStruct);
}
uint16_t turn(void)
{
return CountSensor_Count;
}
//中断函数不需要声明,但一定是这个函数名
void EXTI15_10_IRQHandler(void)
{
if(EXTI_GetITStatus(EXTI_Line14)==SET) //判断是否是外部中断14号线触发的中断
{
if (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_14) == 0)
{
CountSensor_Count ++; //计数值自增一次
}
EXTI_ClearITPendingBit(EXTI_Line14); //清除外部中断14号线的中断标志位
//中断标志位必须清除
//否则中断将连续不断地触发,导致主程序卡死
}
}
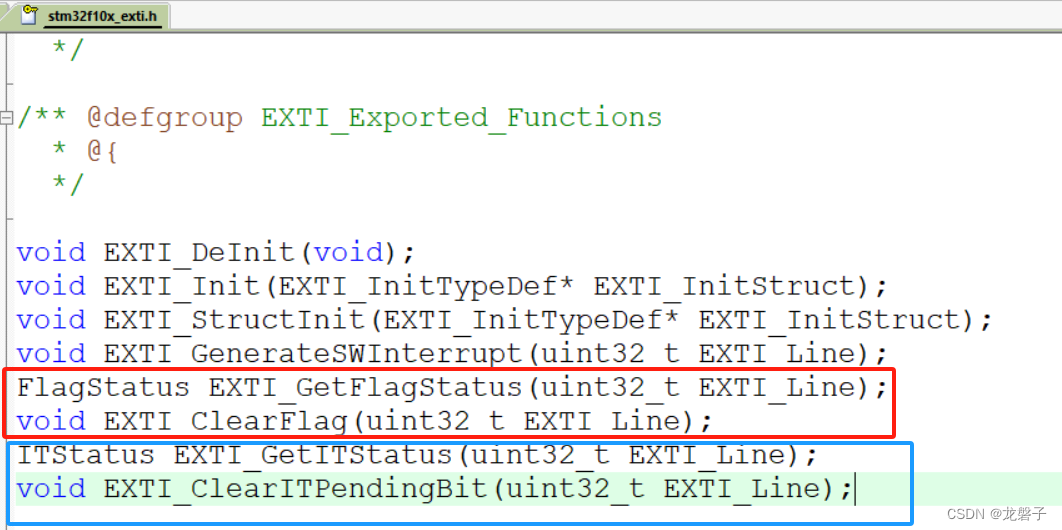
最后中断函数的设置参考这个,红色的一般用于主函数中,蓝色的一般用于sensor中
5.main.c代码如下:
#include "stm32f10x.h" // Device header
#include "OLED.h"
#include "sensor.h"
int main()
{
OLED_Init();
SENSOR_Init();
OLED_ShowString(1, 2, "RED_LED:");
while (1)
{
OLED_ShowNum(2, 2, turn(), 5);
}
}
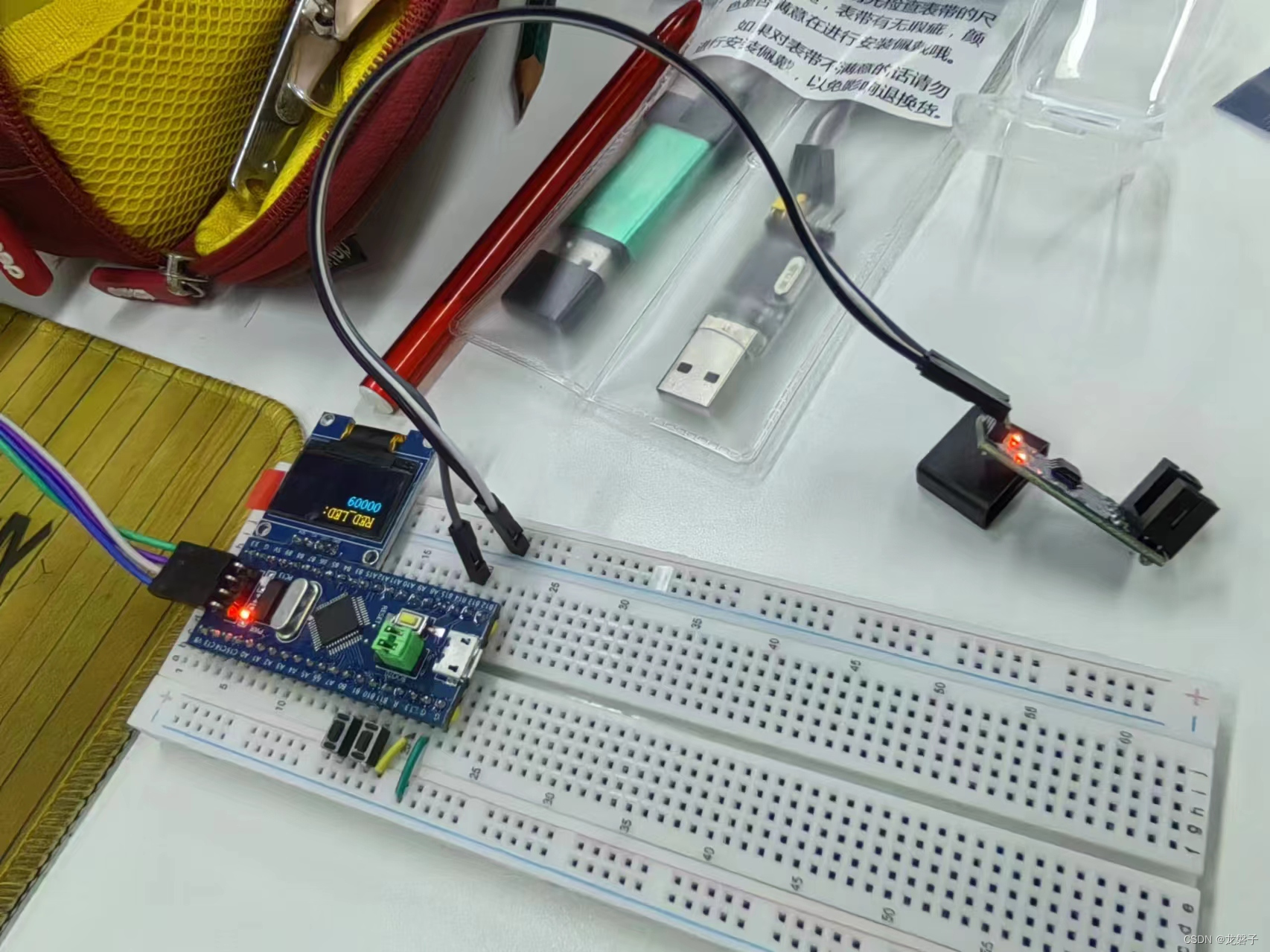
6.实验结果
注意
ctrl+alt+空格可以出现代码提示