目录
STM32作业设计
STM32作业实现(一)串口通信
STM32作业实现(二)串口控制led
STM32作业实现(三)串口控制有源蜂鸣器
STM32作业实现(四)光敏传感器
STM32作业实现(五)温湿度传感器dht11
STM32作业实现(六)闪存保存数据
STM32作业实现(七)OLED显示数据
STM32作业实现(八)触摸按键TPAD
STM32作业实现(九)驱动舵机
源码位置
编写dht11(温湿度传感器)驱动文件
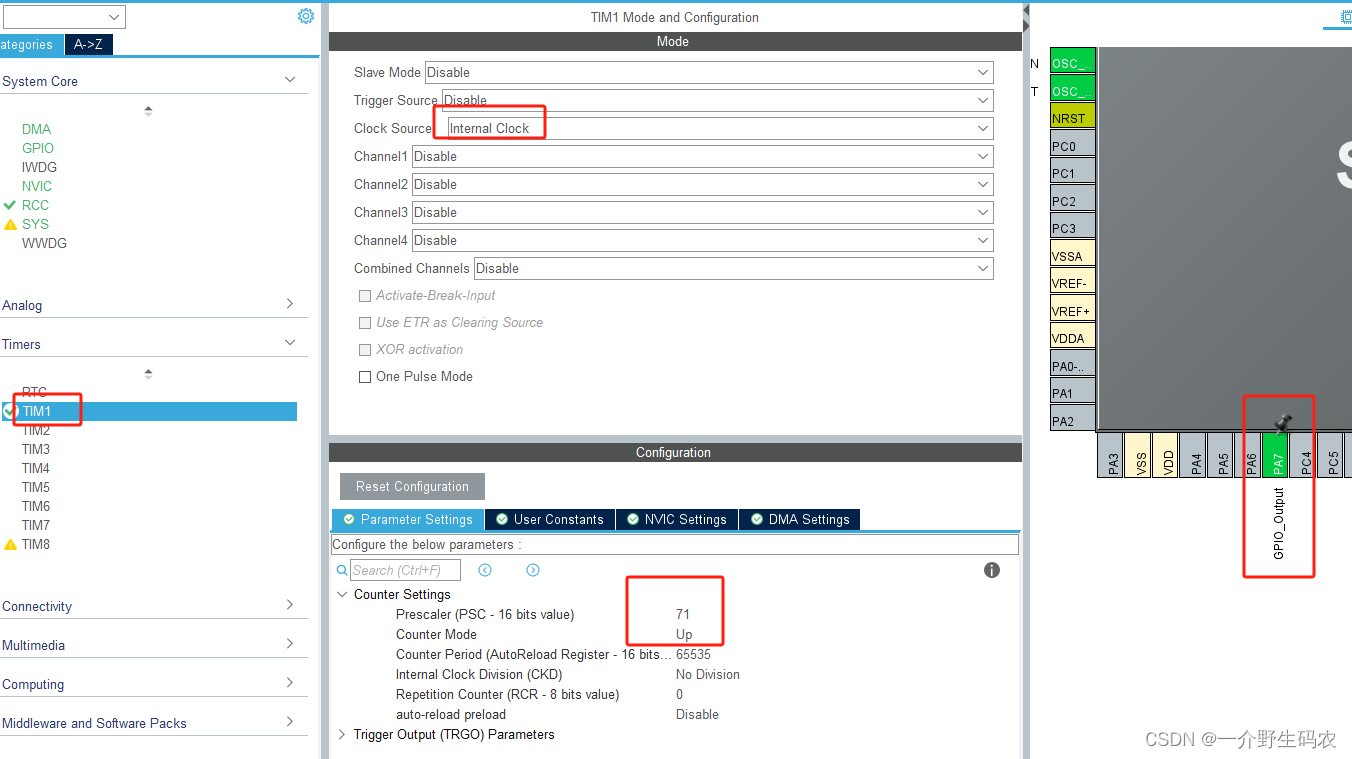
打开pa7引脚用于传输数据,tim1用做计时器(微秒级定时器,因为时钟频率72MHz,分频72之后计数一次为1us)
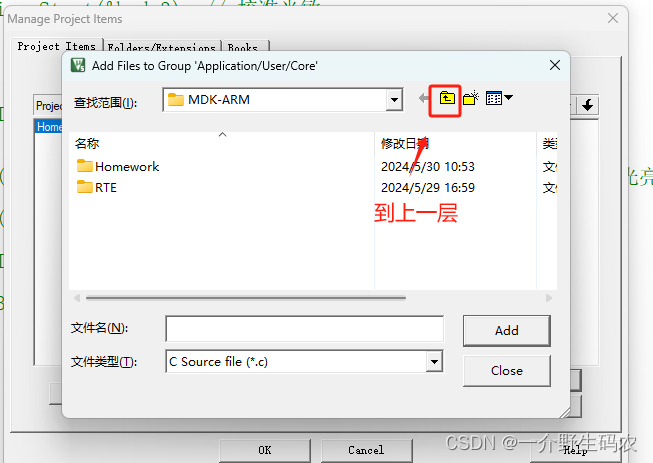
在项目所在路径的Core目录中Src下添加源文件,Inc下添加头文件
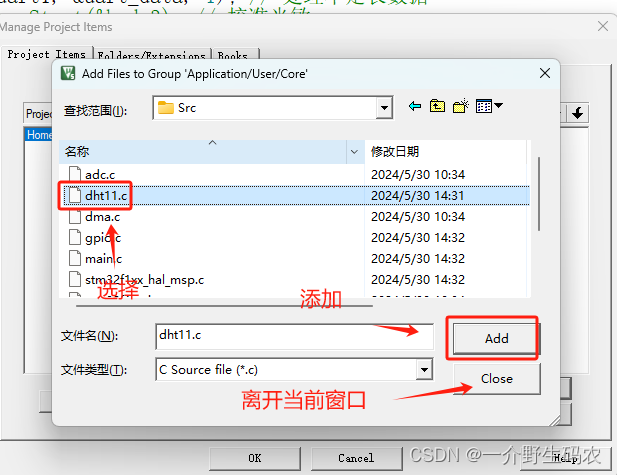
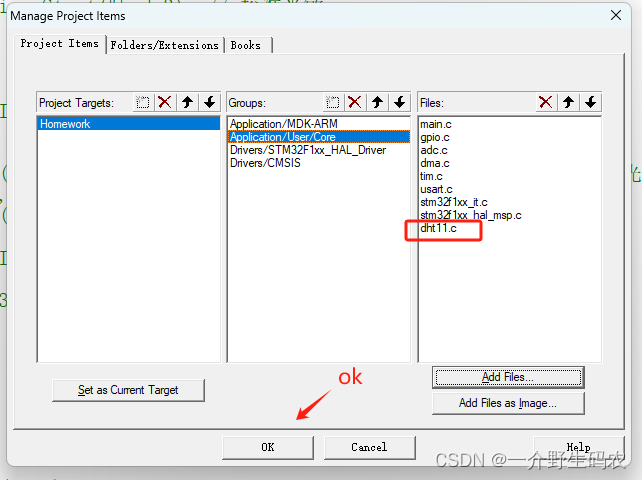
Keil uVision5中添加新建的源文件,在源文件中include头文件后编译
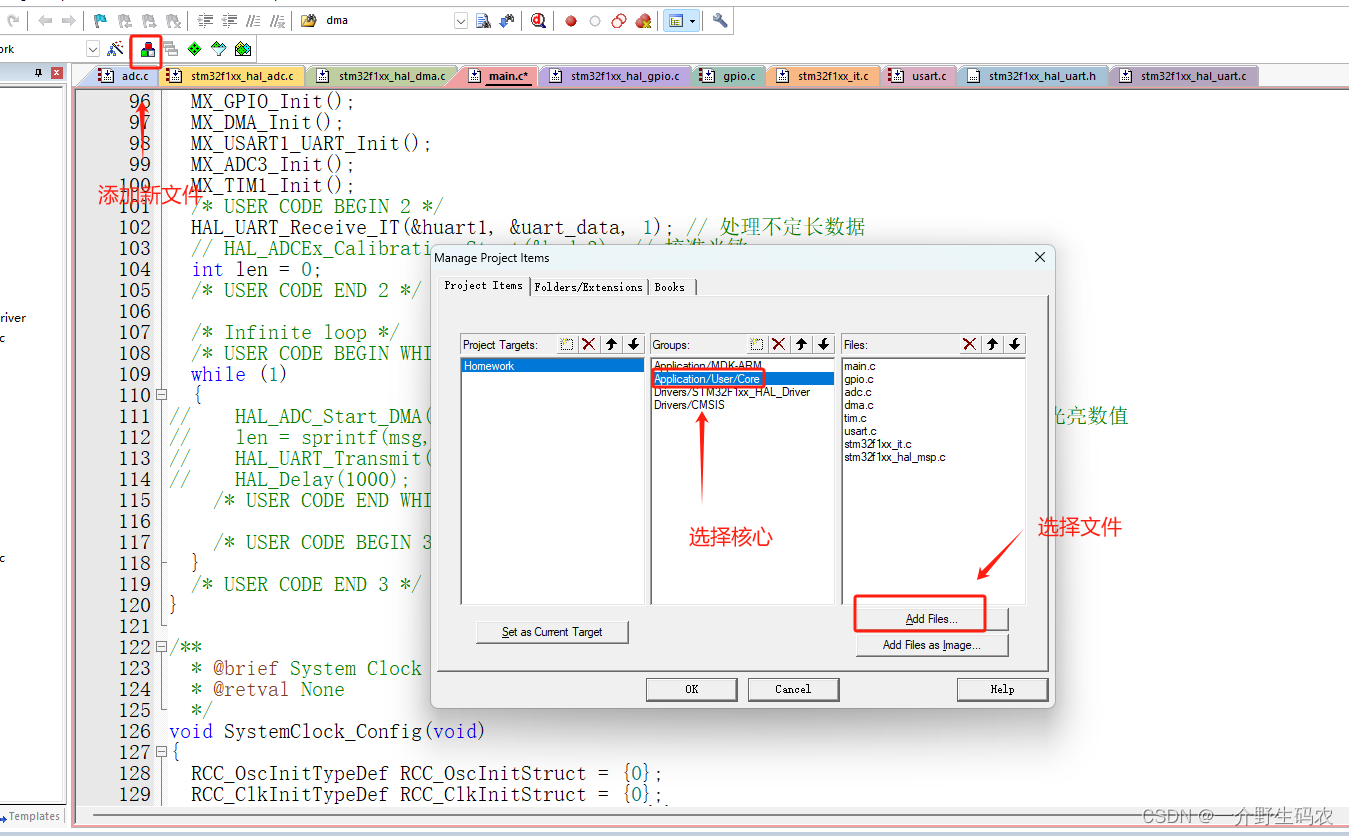
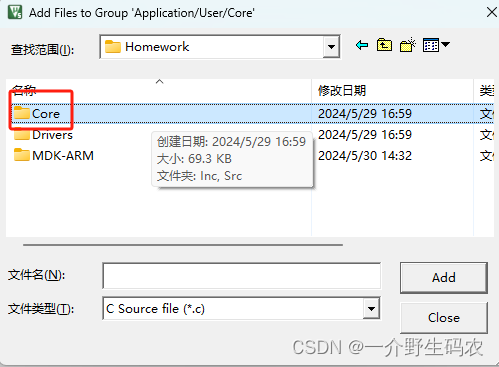
core下的src 新建并添加一个dht11.c的文件,在core下的Inc也同步新建dht11.h的空文件
编写驱动文件内容
dht11.h
c
#ifndef __DHT11_H__
#define __DHT11_H__
#include "main.h"
#include "tim.h"
uint8_t DHT_read(void); // 读取温湿度
#endifdht11.c
c
#include "dht11.h"
uint8_t dht11_data[5] = {0, 0, 0, 0, 0};
// 将GPIO引脚设置为输出
void SET_PIN_OUTPUT()
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
/*Configure GPIO pin : PA7 */
GPIO_InitStruct.Pin = GPIO_PIN_7;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP; // 输出模式
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
}
// 将GPIO引脚设置为输入
void SET_PIN_INPUT()
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
/*Configure GPIO pin : PA7 */
GPIO_InitStruct.Pin = GPIO_PIN_7;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT; // 输入模式
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
}
// 微秒级延时
void Delay_us(uint16_t us)
{
uint16_t us_cnt = us;
__HAL_TIM_SET_COUNTER(&htim1, 0); // 设置计数器起始值
HAL_TIM_Base_Start(&htim1); // 启动定时器
while (htim1.Instance->CNT < us_cnt)
; // 循环等待
HAL_TIM_Base_Stop(&htim1);
}
// 电平读取函数,每8个电平存一个字节
uint8_t DGT_read_byte()
{
uint8_t read_byte; // 读取到的电平
uint8_t hp = 0; // 防止死循环
for (uint8_t i = 0; i < 8; i++)
{
read_byte <<= 1;
// 先判断此时引脚的电平状态,如果是低电平就一直循环等待,
while ((HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_7) == GPIO_PIN_RESET) && hp < 100)
{
Delay_us(1); // 等待1us
hp++;
}
// 直到高电平出现,高电平出现后延时 40us,
Delay_us(40);
// 并读取延时后的电平状态,如果此时是高电平,则数据为 1,否则为 0
if (HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_7) == GPIO_PIN_SET)
{
read_byte++;
}
hp = 0;
// 等待低电平到来,开启下一次读取数据或结束
while ((HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_7) == GPIO_PIN_SET) && hp < 100)
{
Delay_us(1); // 等待1us
hp++;
}
}
return read_byte;
}
// DHT11温湿度读取程序
uint8_t DHT_read(void)
{
// 总线控制权在32
// 发送18毫秒低电平
SET_PIN_OUTPUT(); // 将引脚设置为输出
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_7, GPIO_PIN_RESET); // 设置低电平
HAL_Delay(18);
// 拉高一段时间高电平
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_7, GPIO_PIN_SET);
Delay_us(20);
// 总线控制在DHT11
SET_PIN_INPUT();
// 如果读取到低电平,说明DHT11有响应
if (HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_7) == GPIO_PIN_RESET)
{
uint8_t hp = 0; // 防卡死
// 等待反转高电平
while ((HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_7) == GPIO_PIN_RESET) && hp < 100)
{
Delay_us(1);
hp++;
}
hp = 0;
// 等待低电平到来,低电平到来后读取数据
while ((HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_7) == GPIO_PIN_SET) && hp < 100)
{
Delay_us(1);
hp++;
}
// 开始读取数据
for (uint8_t i = 0; i < 5; i++)
{
dht11_data[i] = DGT_read_byte();
}
// 读取结束等待50us
Delay_us(50);
// 校验数据
uint32_t sum = dht11_data[0] + dht11_data[1] + dht11_data[2] + dht11_data[3];
if ((sum & 0x000000ff) == dht11_data[4])
return 1;
}
return 0;
}