目录
1.背景
2024年,S Fu受到自然界中红嘴蓝喜鹊社会行为启发,提出了红嘴蓝喜鹊优化算法(Red-billed Blue Magpie Optimizer, RBMO)。


2.算法原理
2.1算法思想
RBMO模拟了红嘴蓝喜鹊的搜寻、追逐、攻击猎物和食物储存行为。

2.2算法过程
寻找食物
在寻找食物的过程中,红嘴蓝喜鹊通常以小组(2至5只)或成群(10只以上)的方式行动,以提高搜索效率。小组寻找食物:
X i ( t + 1 ) = X i ( t ) + ( 1 p × ∑ m = 1 p X m ( t ) − X ′ s ( t ) ) × R a n d 2 (1) \mathbf{X}^i(t+1)=\mathbf{X}^i(t)+\left(\frac{1}{p}\times\sum_{m=1}^p\mathbf{X}^m(t)-\mathbf{X}^{\prime\text{s}}(t)\right)\times Rand_2\tag{1} Xi(t+1)=Xi(t)+(p1×m=1∑pXm(t)−X′s(t))×Rand2(1)
成群寻找食物:
X i ( t + 1 ) = X i ( t ) + ( 1 q × ∑ m = 1 q X m ( t ) − X r s ( t ) ) × R a n d 3 (2) \mathbf{X}^i(t+1)=\mathbf{X}^i(t)+\left(\frac{1}{q}\times\sum_{m=1}^q\mathbf{X}^m(t)-\mathbf{X}^{rs}(t)\right)\times Rand_3\tag{2} Xi(t+1)=Xi(t)+(q1×m=1∑qXm(t)−Xrs(t))×Rand3(2)
攻击猎物
红嘴蓝喜鹊在追捕猎物时表现出高度的狩猎熟练度和合作精神,在小组行动中,主要目标通常是小型猎物或植物:
X i ( t + 1 ) = X 6 o o d ( t ) + C F × ( 1 p × ∑ m = 1 p X m ( t ) − X i ( t ) ) × R a n d n 1 (3) \mathbf{X}^{i}(t+1)=\mathbf{X}^{6ood}(t)+CF\times\left(\frac1p\times\sum_{m=1}^{p}\mathbf{X}^{m}(t)-\mathbf{X}^{i}(t)\right)\times Randn_{1}\tag{3} Xi(t+1)=X6ood(t)+CF×(p1×m=1∑pXm(t)−Xi(t))×Randn1(3)
红嘴蓝喜鹊在成群行动时,能够共同瞄准大型昆虫或小型脊椎动物等较大的猎物:
X i ( t + 1 ) = X β o o d ( t ) + C F × ( 1 q × ∑ m = 1 q X m ( t ) − X i ( t ) ) × R a n d n 2 (4) \mathbf{X}^i(t+1)=\mathbf{X}^{\beta ood}(t)+CF\times\left(\frac{1}{q}\times\sum_{m=1}^{q}\mathbf{X}^m(t)-\mathbf{X}^i(t)\right)\times Randn_2\tag{4} Xi(t+1)=Xβood(t)+CF×(q1×m=1∑qXm(t)−Xi(t))×Randn2(4)
其中,参数CF表述为:
C F = ( 1 − ( t T ) ) ( 2 × t T ) (5) CF=\left(1-\left(\frac tT\right)\right)^{\left(2\times\frac tT\right)}\tag{5} CF=(1−(Tt))(2×Tt)(5)
储存食物
红嘴蓝喜鹊还将多余的食物储存在树洞或其他隐蔽的地方,以备将来食用,确保在食物短缺时稳定的食物供应:
X i ( t + 1 ) = { X i ( t ) i f f i t n e s s o l d i > f i t n e s s n e w i X i ( t + 1 ) e l s e (6) \left.\mathbf{X}^i(t+1)=\left\{\begin{matrix}\mathbf{X}^i(t)&if fitness_{old}^i>fitness_{new}^i\\\mathbf{X}^i(t+1)&else\end{matrix}\right.\right.\tag{6} Xi(t+1)={Xi(t)Xi(t+1)iffitnessoldi>fitnessnewielse(6)
伪代码

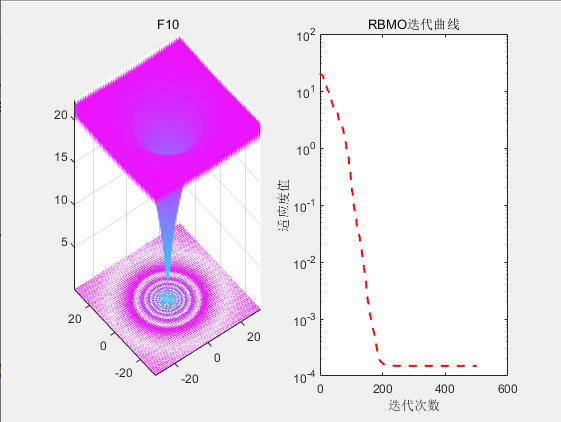
3.结果展示

4.参考文献
1 Fu S, Li K, Huang H, et al. Red-billed blue magpie optimizer: a novel metaheuristic algorithm for 2D/3D UAV path planning and engineering design problemsJ. Artificial Intelligence Review, 2024, 57(6): 1-89.
5.代码获取
智能算法,论文复现,算法应用(机器学习、二维&三维路径规划、UAV路径规划、布局优化、调度优化、VRP问题等),定制算法可以联系我~
资源清单:https://docs.qq.com/sheet/DU1V0QWtSeHJnY0JU?u=989d90f9b14449ec9419aa7b51473c1b\&tab=BB08J2