一、相机参数介绍
1.1 相机内参矩阵
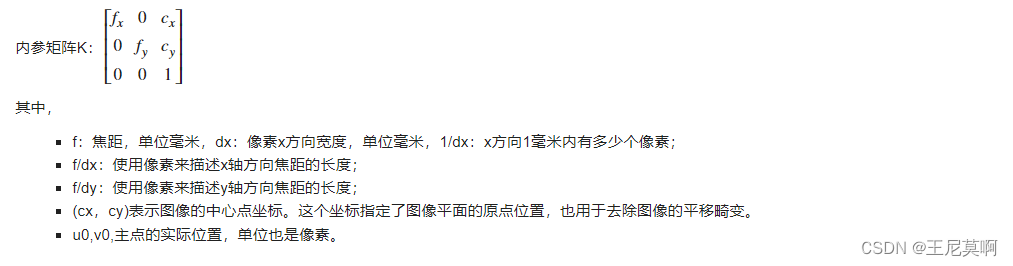
概念 :内参矩阵用于描述相机的内部参数,它包含了相机的焦距、主点坐标和图像的畸变等信息。内参矩阵的形式通常为一个3x3的矩阵,常用表示为K。内参矩阵可以将相机坐标系中的三维点映射到图像平面上的二维像素坐标。通过内参矩阵,我们可以进行相机标定、图像校正和三维点云到图像的投影等操作。
标定后的相机内参矩阵为3x3矩阵:
相机标定参照:【鱼眼+普通相机】相机标定。
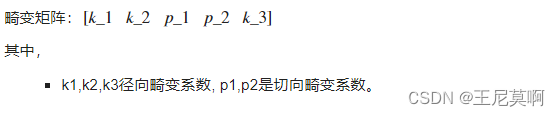
1.2 相机畸变矩阵
普通工业相机畸变矩阵为1x5矩阵: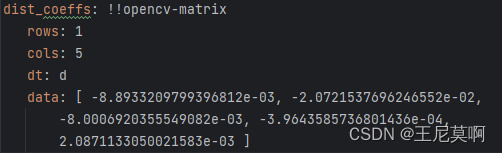
1.3 相机外参矩阵
外参矩阵用于描述相机的外部参数,它包含了相机的位置和朝向信息。外参矩阵定义了世界坐标系到相机坐标系的转换关系。外参矩阵的形式通常为一个4x4的矩阵,常用表示为 R \| t ,其中 R 表示旋转矩阵,t 表示平移向量。通过外参矩阵,我们可以将世界坐标系中的三维点转换到相机坐标系,或者将相机坐标系中的三维点转换到世界坐标系。
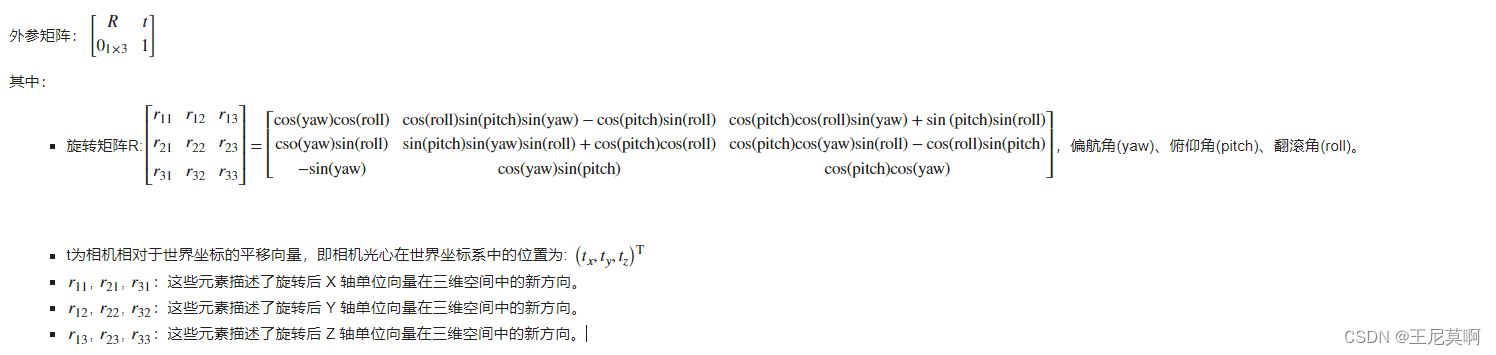
旋转矩阵性质:
- 旋转矩阵是正交矩阵,即它的逆矩阵等于其转置矩阵。
- 旋转不会改变物体的形状或大小,只会改变其方向。
- 在实际应用中,旋转矩阵通常与平移向量一起使用,以描述物体在空间中的完整运动。
二 、坐标系介绍
2.1 相机坐标系{camera}:
坐标原点为相机的光心位置,X 轴和Y 轴分别平行于图像坐标系的X轴和 Y 轴,Z 轴为相机的光轴。相机坐标系中的点,用 表示。
表示。
2.2 图像物理坐标系:
坐标原点为CCD 图像平面的中心,X轴和Y 轴分别平行于图像平面的两条垂直边。图像物理坐标系中的点,用 表示。图像物理坐标系是用物理单位(例如毫米)表示像素在图像中的位置。
表示。图像物理坐标系是用物理单位(例如毫米)表示像素在图像中的位置。
2.3 图像像素坐标系{image}:
坐标原点为图像平面的左上角顶点,X 轴和Y 轴分别平行于图像物理坐标系的 X 轴和Y 轴。图像像素坐标系中的点,用 表示。像素坐标系就是以像素为单位的图像坐标系。
表示。像素坐标系就是以像素为单位的图像坐标系。
2.4 世界坐标系(world coordinate):
也称为测量坐标系,是一个三维直角坐标系,以其为基准可以描述相机和待测物体的空间位置。世界坐标系的位置可以根据实际情况自由确定。
坐标原点为目标中心点位置,X轴水平向右,Y轴指向地面,Z轴与光轴方向平行。坐标系中的点,用  表示。
表示。
2.5 Ground坐标系 :
在世界坐标系中, Yw = 0 的平面。
三、坐标系转换公式
3.1 相机坐标系 -> 图像像素坐标系:
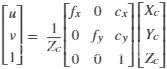
式中,
- u和v是图像坐标系中点的x轴和y轴像素坐标,其原点是图像的左上角顶点,x轴朝右、y轴朝下是正方向。
- Zc是在相机坐标系下的Z轴坐标,也即深度。
- fx和fy分别是x轴和y轴像素焦距 (单位为pixel)。
- Cx和Cy是图像的中心点o1(相机坐标系的光心在图像上成像的点)的像素坐标(以图像左上角顶点作为原点)。
3.2 世界坐标系 -> 相机坐标系:
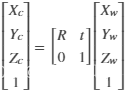
式中,
- 将点Xw Yw Zw从世界坐标系通过刚体变换(旋转和平移)变换到相机坐标系,这个变换过程使用的是相机间的相对位姿,也就是相机的外参数。
- 旋转矩阵为R,平移向量为t。
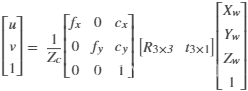
3.3 世界坐标系 -> 图像像素坐标系
即前两个转换公式合并。
3.4 相机坐标系 -> 图像物理坐标系:
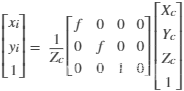
即: 
3.5 图像物理坐标系 -> 图像像素坐标系
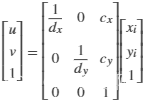
式中,
- u和v是图像坐标系中点的x轴和y轴像素坐标,其原点是图像的左上角顶点,x轴朝右、y轴朝下是正方向。
- cx和cy是图像的中心点o1(相机坐标系的光心在图像上成像的点)的像素坐标(以图像左上角顶点作为原点)。